
基于IRobotSIM的物料分揀仿真系統設計
2021-01-13 12:17:12李國琴鄧三鵬祁宇明趙丹丹
裝備制造技術 2020年10期
張 睿,李國琴,鄧三鵬*,祁宇明,趙丹丹
(天津職業技術師范大學機器人及智能裝備研究院,天津300222)
0 引言
近幾年來,虛擬仿真技術在實際教學的應用越來越廣泛。陳勇強[1]使用VUP軟件搭建了一個物料分揀虛擬仿真平臺,開發了相應的虛擬仿真系統,描述了模型的仿真動作和實現過程,為遠程線上教學提供了參考。劉甘霖[2]等人通過RobotStudio做出了氣動手爪模型的虛擬仿真,設計了Smart組件,綜合機械模型和Smart組件給出了完整的授課內容,為學生提供了工業機器人虛擬仿真的具體應用實例。熊雋[3]等人基于RobotStudio設計了一種基于工業機器人的綜合虛擬仿真實驗平臺,實現了綜合虛擬平臺機器人的涂膠、搬運、碼垛等功能,提高了操作安全性的同時,加強了學生的實踐能力,對工業機器人相關課程的教學起到了很好的輔助作用。本文基于IRobotSIM建立了仿真平臺,擁有較豐富的模型庫,包括國內外知名品牌工業機器人、機床、夾具等,模型庫中的模型可拖拽應用于系統搭建,可根據任務需求進行選擇,研發的物料分揀仿真系統對職業院校的并聯機器人離線仿真教學提供了條件,節約了成本,提高了安全性。
1 物料分揀仿真系統的組成
過來的物料,并有序放置在收納盒中;物料傳送帶的主要功能是對物料進行輸送,配合并聯機器人進行抓取,保證物料的順利傳輸;收納盒傳送帶的主要任務是把收納盒輸送至并聯機器人開始放置物料的位置;機器人支架的作用是固定并聯機器人,使并聯機器人處于工作的最佳位置。
2 物料分揀仿真系統模型的建立
2.1 并聯機器人建模
應用Solidworks對三自由度delta型并聯機器人進行三維模型建模,建模完成后導成.stp格式導入到仿真軟件中。分析并聯機器人的結構,找出動平臺、定平臺和工作空間,每條分支鏈的組成部分,包括各連桿、中間鏈、各分支鏈以及關節類型,并重新設置各部分實體,在每個相應的關節處添加對應的旋轉關節或平行關節,在建立關節時,將每個關節的求解模式設置為反向運動模式。拖動關節和實體,按照主鏈從定平臺到動平臺的順序,其它分支鏈從動平臺到定平臺的順序,中間鏈從定平臺到動平臺,依次構建如圖1所示的關節樹。將已構建好的機器人支架,與已建模的并聯機器人進行裝配,確定其安裝位置與運動方式。建模完成的并聯機器人如圖2所示。
物料分揀仿真系統主要有四個部分組成,包括并聯機器人、物料傳送帶、收納盒傳送帶、機器人支架。并聯機器人的主要功能是抓取物料傳送帶輸送

圖1 關節樹
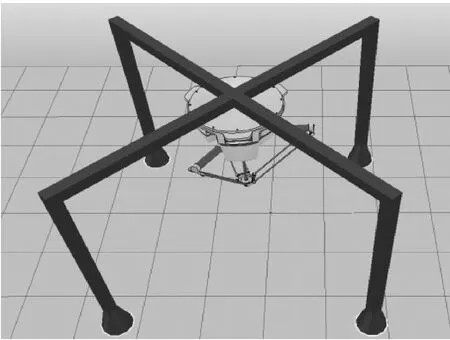
圖2 并聯機器人建模
2.2 傳送帶建模
應用Solidworks對物料分揀仿真系統的物料傳送帶和收納盒傳送帶進行三維模型建模。將完成后的零件圖轉換為.stp格式,并導入至仿真軟件中。添加其各部分物理屬性,并設置其顏色、位置坐標;設置物料和收納盒被并聯機器人抓取的位置坐標;配置相關距離傳感器。搭建完成的仿真系統如圖3所示。

圖3 物料分揀仿真系統
3 仿真系統動作的實現
仿真系統需要運動動作的有物料傳送帶、并聯機器人以及收納盒傳送帶。虛擬仿真系統的動作過程如下:收納盒傳送帶和物料傳送帶同時運動,當收納盒到達并聯機器人放置物料的位置時停止運動,同時物料傳送帶將物料輸送至并聯機器人的抓取位置,并聯機器人開始依次抓取物料并放置在收納盒中。
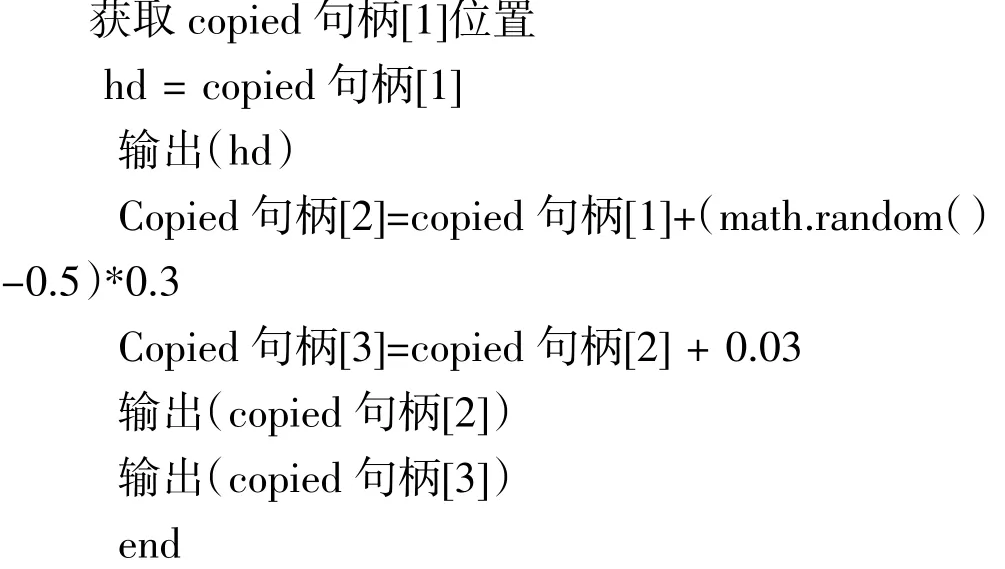
仿真系統動作的實現需要添加三個線性腳本,線性腳本1的功能是將物料傳送至并聯機器人的抓取位置,同時觸發機器人的機械臂抓取物料,線性腳本1如下所示:
線性腳本2的功能是將收納盒傳送至并聯機器人開始放置物料的固定位置,當第一個收納盒裝滿物料后,第二個收納盒再次移動到上次的固定位置,重復以上的動作,線性腳本2如下所示:
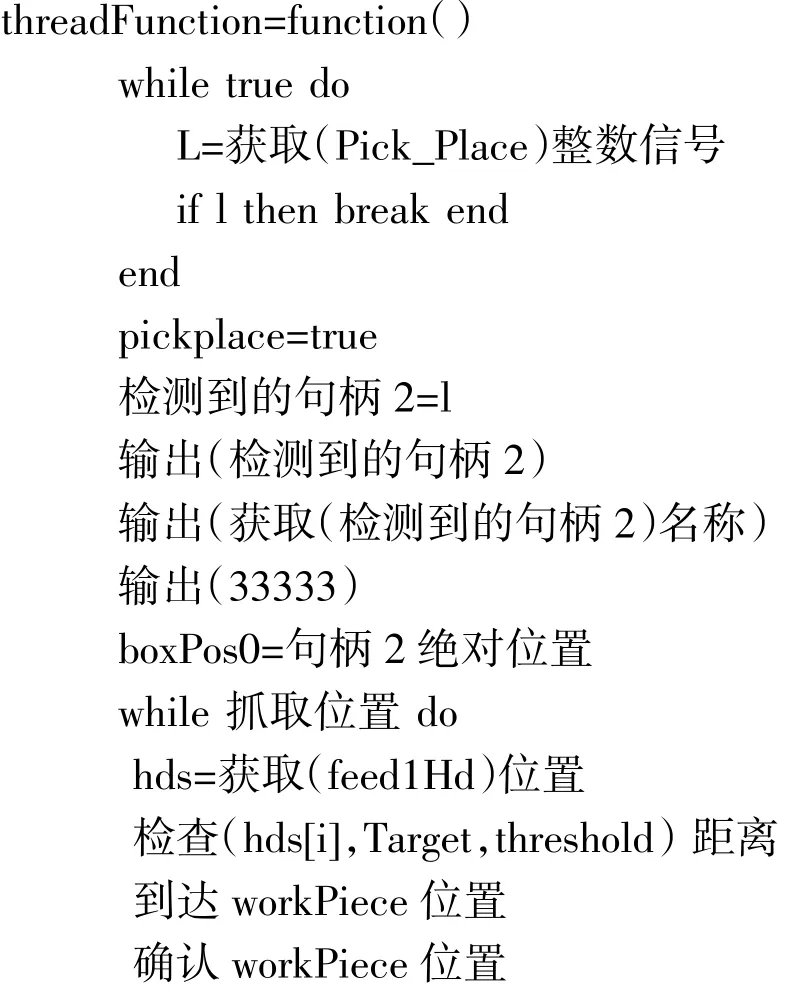
線性腳本3實現的主要功能是當物料移動到并聯機器人開始抓取的位置時,并聯機器人開始依次抓取物料至收納盒中,線性腳本3如下所示:
夫葬者,藏也。藏也者,欲人之不得見也。而大為棺槨,備贈存物, 無異于埋金路隅而書表于上也。雖甚愚之人,必將笑之。豐財厚葬以啟 奸心,或剖破棺槨,或牽曳形骸,或剝臂捋金環,或捫腸求珠玉。焚如 之形,不痛于是?自古及今,未有不死之人,又無不發之墓也。[16](P746)

ITC官方的統計數據顯示,2017年,世界甘薯(HS編碼:071420)的出口貿易總量和總額分別為63.0萬t和5.256億美元.世界甘薯貿易的主要輸出國包括美國、荷蘭、中國、西班牙等國家,其中美國的出口貿易額占世界比重為35.01%,排名前5位的國家出口貿易量和貿易額占到世界出口總量的比重分別為66.42%和71.61%(表1),行業集中度較高.進口市場方面相對分散,世界甘薯主要進口市場包括英國、荷蘭、加拿大、德國等國家,排名前5位國家甘薯進口額約為62%.
潘天壽是1966年9月6日被揪出來的。拉上街在雨中游斗,當夜即發燒病倒了。據小兒子潘公凱統計,此后總計批斗達百次,其中牛棚里有記錄可查的批斗即有70多次。

通過上述模型建立的方法以及動作設置可以有效實現物料分揀仿真系統的設計和動作。
4 結論
本文分別對物料分揀仿真系統的組成、仿真系統模型的建立以及仿真系統動作的實現等三個方面進行了論述,利用以上模塊搭建出符合實際授課需求的物料分揀仿真系統。該仿真系統在實際教學中滿足了學生對并聯機器人離線仿真的學習,作為學生在實際操作前的模擬仿真模型示例,有效提高了學生在實際操作時的學習效率和安全性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
