
基于ROBCAD工業機器人工作空間的仿真與分析
2021-01-13 12:17:18董詩繪
裝備制造技術 2020年10期
董詩繪
(唐山工業職業技術學院,河北 唐山063000)
0 引言
工業機器人的工作空間指機器人不同關節運動達到的末端執行器的所有位置的集合,也叫可達工作空間。在對機器人進行路徑規劃和控制之前,必須要分析其工作空間,工作空間表示工業機器人的活動范圍,這是評價工業機器人工作能力的重要因素[1],也是對工業機器人進行控制的基礎。本文以工業機器人在車身后圍板焊接線的應用為研究對象,使用ROBCAD軟件對工業機器人的工作空間進行仿真,方便現場工程技術人員分析,判斷機器人在工作空間內作業的可行性進而減少實際運行過程中的意外事故。
1 工業機器人工作空間的描述
本文使用的工業機器人是ABB IRB6640型工業機器人,如圖1所示[2]。

圖1 ABB IRB6640型工業機器人
本文采用兩臺ABB IRB6640型機器人焊接同一個后圍板,在機器人仿真時需要對兩個機器人進行工作空間的仿真,檢查待完成的工作任務的目標物體是否在機器人的工作空間范圍內[3]。圖1中兩臺機器人分別命名為RobotA和RobotB。
工業機器人末端執行器的所有位置的集合構成了機器人的工作空間。因此需要求出工業機器人的末端執行器的所有位置的坐標[4]。本文采用Denavit-Hartenberg方法(簡稱D-H方法),已知各個關節變量的值,如表1所示,從基座固定坐標系開始依次通過各連桿坐標系的傳遞,推導求出機器人末端手部坐標系的位姿。ABB IRB6640型機器人的連桿坐標系如圖2所示。

表1 ABB IRB6640型機器人的連桿參數

圖2 ABB IRB6640連桿坐標系
Ai變換矩陣,表示的是一個連桿坐標系與下一個連桿坐標系間相對關系的齊次變換矩陣。

將表1機器人各個參數帶入式(1)中,得到各個連桿的齊次變換矩陣為:

ABB IRB6640型機器人的運動學方程為:

上式中,前3列坐標表示機s器人的位置,第4列表示的是末端手部的位置,所以求得手部的位置坐標:


機器人的工作空間用Q表示為:
2 工業機器人工作空間仿真
2.1 ROBCAD軟件介紹
ROBCAD軟件現為西門子公司Siemens PLM Software管理軟件的一部分[5]。該軟件可選機器人型號和焊槍類型、導入創建焊點、工作空間仿真、干涉分析、平衡生產節拍和離線編程等。該軟件建模速度快、機器人仿真十分精確而被許多企業大力推行,在許多著名汽車生產制造商中采用ROBCAD軟件進行工業機器人的自動化生產線設計和仿真等工作。
2.2 工作空間仿真
采用MATLAB對機器人工作空間進行仿真,求解其工作空間[2],仿真結果如圖3所示。雖然可以得到整個工作空間的三維圖,但是仿真過程計算量大,過程慢,仿真結果不直觀。通過使用MATLAB軟件和ROBCAD軟件進行工業機器人工作空間仿真結果比較,利用ROBCAD軟件仿真的工作空間求解速度更快、邊緣輪廓更完整、圖像更清晰、更直觀,更加適用于工業機器人實際應用,如圖4所示。

圖3 基于MATLAB工作空間的仿真

圖4 基于ROBCAD軟件工作空間的仿真
3 工作空間仿真分析
對于一個成品的機器人來說,面對一個待完成的操作任務,前提是目標物體在機器人的工作空間范圍內,即考慮機器人工作空間能否包含其任務空間。在滿足的情況下,才能對其進行相關操作,考慮如何完成任務;對于不在機器人工作空間范圍的目標物體,就要使該物體到達機器人的工作空間范圍之內,否則將不能完成對目標物體的具體操作。
通過對兩個機器人工作空間的仿真(圖5),目標物體后圍板在RobotA的工作空間范圍內(圖5(a)中,輪廓為RobotA的工作空間),也在robot2的工作空間范圍內(圖5(b)中,輪廓為RobotB的工作空間)。即兩個機器人工作空間都能包含其任務空間,可以對目標物體進行相關操作。

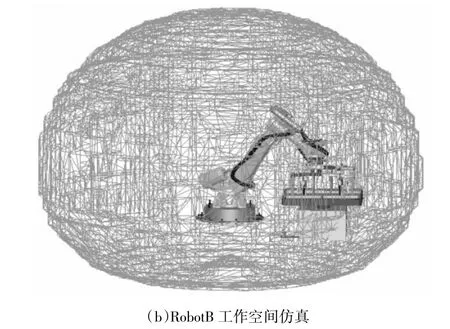
圖5 ABB IRB6640型工業機器人工作空間仿真
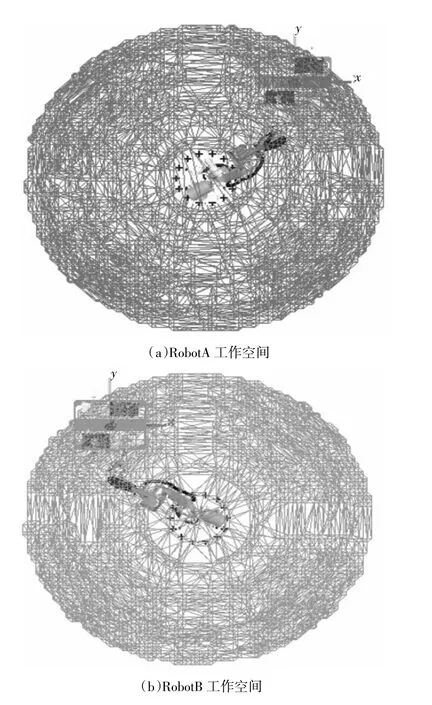
圖6 機器人工作空間在XOY平面投影
圖7和圖8是在同一空間內RobotA和RobotB工作空間的仿真及其在XOY平面投影[5]。通過對兩個機器人在同一工作空間的仿真,板件都在兩個機器人工作空間范圍內,即工作空間包含任務空間,滿足機器人工作條件。

圖7 在同一空間內RobotA和RobotB工作空間的仿真
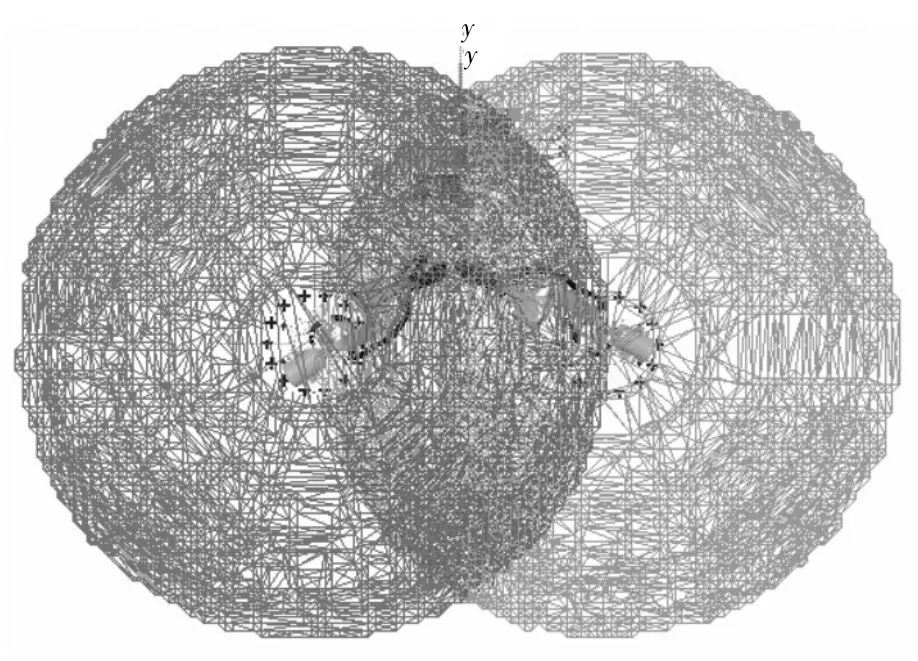
圖8 在同一空間內雙機器人工作空間的XOY平面投影
4 結語
本研究采用ROBCAD軟件對工業機器人焊接車身后圍板工作空間的仿真,機器人的工作空間求解速度快、邊緣輪廓更完整、圖像更清晰、更直觀,對機器人工作空間與任務空間進行分析得出機器人工作空間包含兩個機器人焊接的任務空間,機器人、后圍板及其工裝設備符合實際生產線布局要求,為機器人焊接軌跡規劃和控制提供了有利參考依據,保障生產線安全生產,對實際生產線可以正常投產起到了很大作用。
