基于VISSIM的機動車庫閘機仿真實現(xiàn)方法
2021-01-14 01:39:32張子陽張雪蓮
黑龍江交通科技 2020年12期
關(guān)鍵詞:設(shè)置
張子陽,張雪蓮,王 瀟
(重慶城市交通研究院有限責任公司,四川 重慶 401121)
1 引 言
對城市大型機動車庫而言,高峰時期進出車庫的交通量很大,進出車輛往往受車庫閘機處通行能力的影響,會引起進車庫車輛倒灌入市政道路的情況,更有甚者嚴重影響市政道路的交通運行。隨著城市管理部門、建設(shè)單位等對城市交通問題的不斷重視,對機動車庫出入口進行定量分析和直觀展現(xiàn)的需求就越來越大。目前,在交通研究工作中,普遍采用交通仿真的方式來展現(xiàn)實際交通運行情況,但主流的交通仿真軟件——VISSIM并沒有閘機仿真模塊,需要借助VISSIM軟件的其他功能予以實現(xiàn)。
2 車輛通過閘機過程分析
機動車通過車庫閘機的過程可被總結(jié)為:減速駛?cè)搿獟呙?或收費)—抬桿—駛離四個步驟。
減速駛?cè)耄很嚺谱R別系統(tǒng)對車牌的識別效率與車輛的行駛速度有關(guān),目前大多數(shù)設(shè)備所支持的識別速度在5 km/h左右,而車輛在道路上的行駛速度往往較高,因此車輛在進入閘機處時,勢必要進行減速。停車收費的過程與之相似,車輛由行駛狀態(tài)變?yōu)橥V範顟B(tài),車輛也需要減速。
掃描(或收費):掃描的過程與車牌識別系統(tǒng)本身有關(guān),通過計算機軟件對車牌進行識別和存儲,并反饋給控制系統(tǒng),計算費用并繳費。
抬桿:識別車牌并存儲后,控制系統(tǒng)控制閘機桿抬升,通道打開。
駛離:閘機桿抬升后,通道打開,駕駛員加速駛離閘機,完成進出閘機的整個過程。
可以發(fā)現(xiàn)車輛在通過閘機時需要經(jīng)歷減速—等待—加速的過程。在實際交通運行過程中,車輛等紅燈、車輛通過停車讓行標志等情況也經(jīng)歷了減速—等待—加速的過程。
車輛等紅燈的過程可總結(jié)為:進交叉口—等待—綠燈亮—駛離四個步驟。
停車讓行標志“表示車輛應(yīng)在停止線前停車瞭望,確認安全后,方可通行。”這一過程可被總結(jié)為:到達—停車瞭望—確認安全—駛離四個步驟。
綜上,車輛進出閘機的過程與車輛等待紅燈、停車讓行的過程是相似的。可以分別利用VISSIM軟件的信號控制模塊和停車標志模塊實現(xiàn)對車庫通過閘機過程的仿真。
3 仿真參數(shù)的確定
(1)閘機通行能力。閘機的通行能力主要受車牌識別系統(tǒng)的效率、閘機抬桿時間和駕駛?cè)藛T的駕駛水平的影響。通過不同車庫的實際調(diào)查,車輛連續(xù)通過閘機的時間約為10 s,閘機處的通行能力約為360輛/h。
(2)車輛駛?cè)腴l機前的平均車速。車輛駛?cè)腴l機前,往往行駛在市政道路連接車庫閘機的通道上或車庫內(nèi)部通道上,一般來說,車輛的平均速度不高。當車輛形成排隊時,平均車速約為5 km/h,當無排隊時,平均車速約為12 km/h。
(3)車輛通過閘機時的平均車速:5 km/h。
(4)信號控制周期:應(yīng)與連續(xù)車輛通過閘機的平均時間一致,即10 s。
(5)減速區(qū)。減速區(qū)是VISSIM軟件中的一個模塊,其含義是車輛經(jīng)過該區(qū)域后,車速將降低至減速區(qū)所設(shè)定的速度。根據(jù)對車輛通過閘機過程的分析,車輛在閘機前會有一個減速的過程,為使仿真模型與實際交通運行一致,設(shè)置減速區(qū)的速度為5 km/h,與車輛通過閘機時的速度相同。
4 信號控制模塊實現(xiàn)閘機仿真方法
采用不同情境進行模擬,以選取最接近實際情況的參數(shù)。信號控制模塊實現(xiàn)閘機仿真時控制車輛通過閘機的關(guān)鍵參數(shù)為綠燈時長,綠燈時長在1~6 s之間,間隔1 s。此外,還應(yīng)考慮車輛通過閘機前的平均車速(5 km/h,12 km/h)和是否有減速區(qū)的影響。利用VISSIM軟件進行仿真,不同情境下的仿真結(jié)果分析發(fā)現(xiàn)。
(1)車輛通過閘機前的平均車速為12 km/h,設(shè)置減速區(qū)與不設(shè)置減速區(qū)的仿真結(jié)果差異較大。顯然,設(shè)置減速區(qū)與實際交通運行更相符。
(2)車輛通過閘機前的平均車速為5 km/h時,由于減速區(qū)速度與平均行車速度一致,故仿真結(jié)果基本一致。
(3)當設(shè)置減速區(qū)時,原始行車速度為12 km/h和5 km/h的仿真結(jié)果差異不大,可見,車輛通過閘機時的速度與閘機的通行能力直接相關(guān)。
(4)當綠燈時間在2~5 s時,不同情境的仿真結(jié)果一致,通過車輛數(shù)均為360輛。即當信號燈周期為10 s,綠燈時間在2~5 s時,平均每個周期可放一輛車通過,此時閘機處的通行能力為360輛/h。
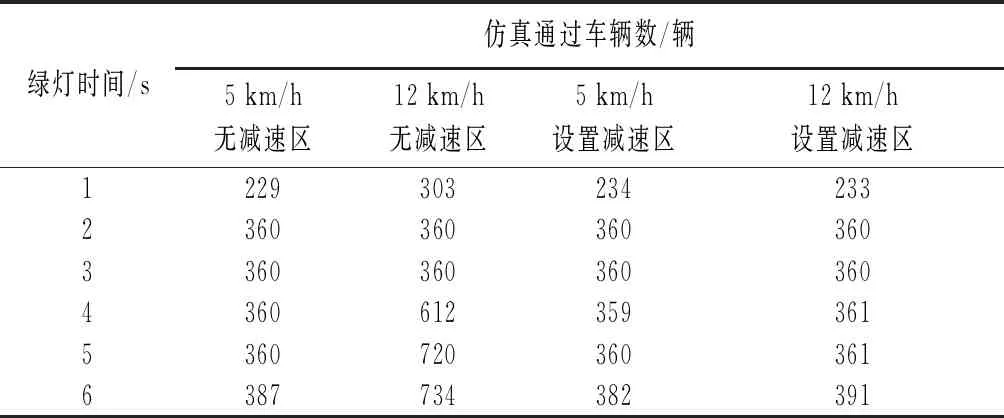
表1 信號控制模塊實現(xiàn)閘機仿真模擬結(jié)果
綜上所述,閘機的通行能力與車輛通過閘機時的速度直接相關(guān)。而通過閘機的速度又直接取決于車輛原始速度和是否設(shè)置減速區(qū)。結(jié)合實際交通運行情況和仿真結(jié)果,推薦采用車輛駛?cè)腴l機前的平均車速為12 km/h、設(shè)置減速區(qū)(5 km/h)、綠燈時長為2~5 s的參數(shù)實現(xiàn)機動車庫閘機的仿真。
5 停車標志模塊實現(xiàn)閘機仿真方法
利用停車標志模塊實現(xiàn)閘機仿真時,需要定義在停車標志前的停車時間。停車時間在0.5~4 s之間取值,間隔0.5 s。由于前文已證實當車輛駛?cè)腴l機前的平均車速為5 km/h時,是否設(shè)置減速區(qū)對仿真結(jié)果影響不大,因此,只對三種情境進行仿真模擬,即5 km/h,無減速區(qū);12 km/h,無減速區(qū);12 km/h,設(shè)置減速區(qū)。
通過設(shè)置信息采集器對通過閘機的車輛數(shù)進行統(tǒng)計,不同情境下的通行能力如下。
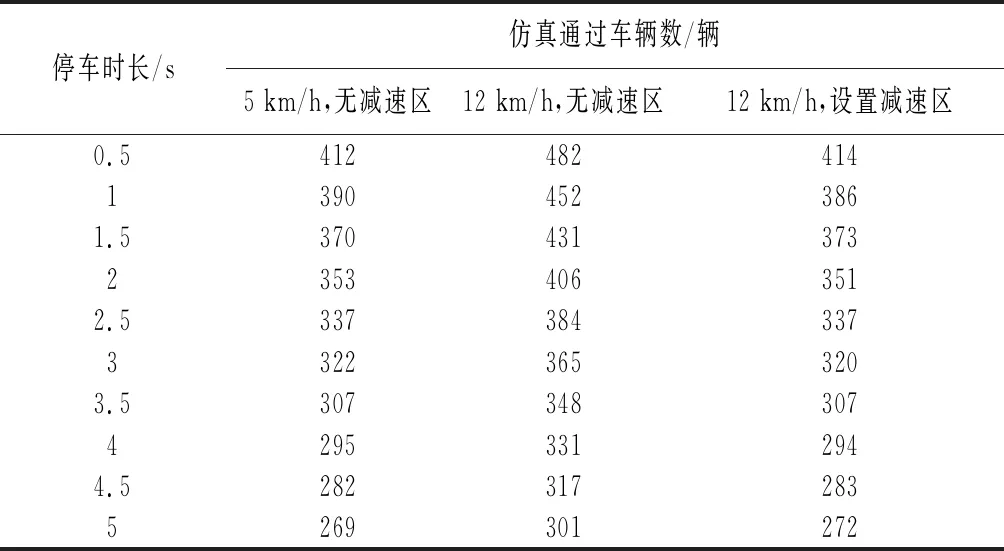
表2 停車標志模塊實現(xiàn)閘機仿真模擬結(jié)果
通過對仿真數(shù)據(jù)的分析,可以看出。
(1)當設(shè)置減速區(qū)時,閘機處的通行能力與車輛駛?cè)腴l機前的平均車速無關(guān),也即閘機處的通行能力取決于車輛通過閘機時的平均車速。
(2)隨著停車時間的增大,閘機處的通行能力降低。這也與駕駛水平差的駕駛員通過閘機所需時間更長的實際是一致的。
(3)當停車時間在1.5~3.5 s時,仿真結(jié)果大致相同,在300~370輛這一區(qū)間內(nèi)。
結(jié)合實際交通運行情況和仿真結(jié)果,推薦采用車輛駛?cè)腴l機前的平均車速為12 km/h,設(shè)置減速區(qū)(5 km/h),停車時間為1.5~3.5 s的參數(shù)來實現(xiàn)機動車庫閘機的仿真。
6 適用條件分析
對于利用信號控制模塊實現(xiàn)閘機仿真時,出現(xiàn)了多個仿真結(jié)果一致(均為360輛)的情況。其原因是在不同的綠燈時長下,每個周期只能通過一輛車,這與車庫閘機處的實際交通運行情況相符。但當車輛到達不連續(xù)時,則可能會出現(xiàn)車輛在綠燈時到達的情況,此時車輛將不停車通過,與實際情況不符。而當綠燈時長增大后,會出現(xiàn)一個周期通過兩輛車或多輛車的情況,這與車庫閘機處的實際交通運行情況不相符。因此,利用信號控制模塊實現(xiàn)閘機仿真模擬的方法相對比較局限,只能實現(xiàn)閘機處車輛連續(xù)排隊進入車庫的情境。
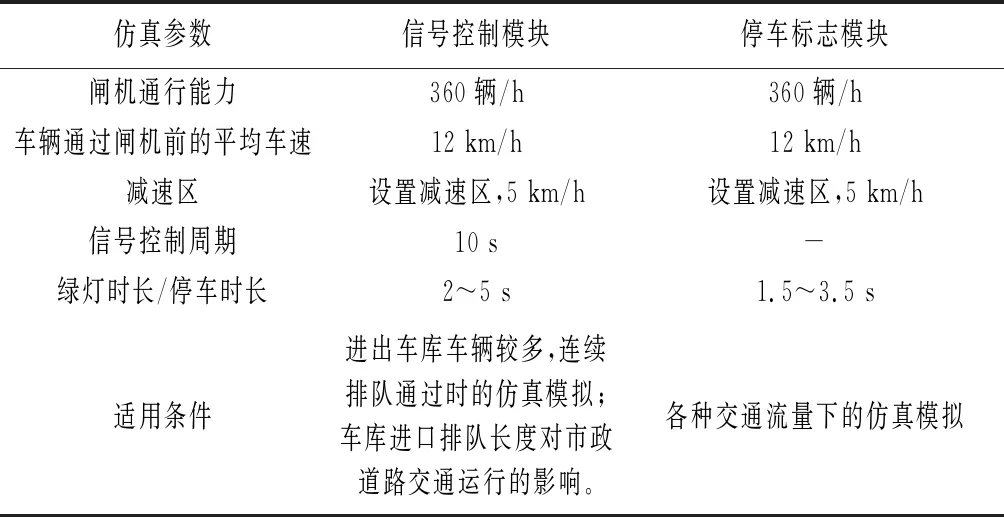
表3 參數(shù)設(shè)置及適用條件
對于停車標志而言,由于其本身的定義使然,車輛在經(jīng)過時必然要停車等待,再啟動通過,這與車輛通過閘機的實際交通運行情況是一致的。因此,利用停車標志模塊實現(xiàn)車庫閘機仿真的方法更符合實際,可以實現(xiàn)連續(xù)、不連續(xù)車流的仿真。
7 結(jié) 論
通過利用VISSIM的信號控制模塊和停車標志模塊可以實現(xiàn)對車輛進出車庫閘機過程的仿真模擬。結(jié)合對實際交通運行情況的分析和實際調(diào)查分析,確定了閘機通行能力、車輛駛?cè)腴l機前的平均車速、車輛通過閘機時的平均車速、減速區(qū)的速度值等參數(shù),并分別利用信號控制模塊和停車標志模塊進行了仿真,明確了信號控制周期、綠燈時長、停車時間等參數(shù)的取值范圍,并對兩種仿真模擬方法的適用條件進行了分析。事實證明,可以利用VISSIM軟件的信號控制模塊和停車標志模塊實現(xiàn)對機動車庫閘機的仿真模擬,具有較高的實踐意義。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業(yè)后醫(yī)學(xué)教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫(yī)學(xué)院學(xué)報(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16