基于有限元的元胡收獲機鏟架動態特性分析
2021-01-14 12:53:56張偉東孫浩然任鴻飛任志貴
裝備制造技術 2020年8期
張偉東,孫浩然,任鴻飛,江 湖,任志貴
(陜西理工大學機械工程學院,陜西 漢中723000)
中國是根莖類作物種植大國,品種眾多的根莖類作物是農業現代化的重要支撐,因此,提高機械化收獲根莖類作物的水平成為廣大科研工作者研究的熱點[1,2]。元胡作為根莖類作物的一種,不但有食用價值,還有藥用價值[3]。為了提高元胡種植收獲效率,減少人工勞作強度,市場上研發了元胡收獲機,其中元胡收獲機的挖掘鏟是其主要收獲部件,影響挖掘深度、挖掘元胡的完好性品質等,為此同時不少學者和機構對其及其部件的性能優化做了研究。如,吳道遠等[4]針對元胡收獲機挖掘鏟入土角度的問題,對挖掘鏟的入土角旋轉調節機構進行了研究,以螺桿帶動挖掘鏟旋轉從而調節入土角度,同時可通過螺母固定挖掘鏟的入土角度,使挖掘深度更加穩定。任志貴等[5]設計了一種可調節工作高度的元胡收獲機推土鏟,基于仿生原理設計了仿生鏟齒,減小了鏟齒的切削阻力,提高了元胡收獲機的工作效率。但在以往的元胡收獲機鏟架的研究中,研究者只針對元胡收獲機實際工作中出現的問題,在其原有的研究基礎上對鏟架的結構進行完善,并未涉及鏟架整體動態特性對元胡收獲機工作過程的影響。
在元胡收獲推土鏟鏟出土壤時,由于土壤中雜質較多,使鏟架整體經常產生振動,當元胡收獲機工作頻率與鏟架整體固有頻率接近時,將引起共振,使鏟架振動加劇[6],不利于元胡收獲機進行收獲工作,因此,通過對元胡收獲機鏟架的模態分析,求解鏟架固有頻率和振型,從而有效避免工作頻率與鏟架固有頻率接近。因此,本文以鏟架整體為研究對象,使用Workbench 軟件,利用模態分析方法得到鏟架的各階模態頻率和模態特性,確定影響元胡收獲機鏟架動態性能的關鍵模態,為元胡收獲機的優化設計提供了一定的理論依據。
1 元胡收獲機鏟架整體有限元模型
元胡收獲機整機主要由破碎機構、輸送機構、篩分機構、行走機構和駕駛臺組成。收獲機時,首先通過高度調節裝置使破碎機構楔入土壤,收獲機開始行走的同時,破碎輥轉動將推土鏟鏟起的土壤破碎,輸送機構將破碎后的土壤送至篩分機構,將土壤和元胡分離,從而實現收獲。
元胡收獲機鏟架包括推土鏟和推土鏟兩側的固定架,以及固定架的連接板,如圖1 所示。
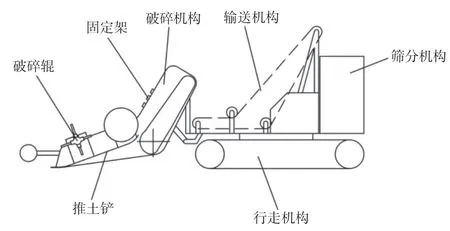
圖1 元胡收獲機整機示意圖
鏟架整體主體作為焊接件,各部位的尺寸精度較低且留有焊縫,不符合有限元模型建模要求,因此在鏟架建模時對各尺寸進行修整,以消除間隙,從而創建合格的鏟架模型[7]。將建好的模型導入Workbench 分析軟件后,將材料定義為Q345,單元尺寸定義為5 mm,劃分單元格后,其單元數為75 633,節點數為75 652。元胡收獲機鏟架整體有限元模型如圖2所示。
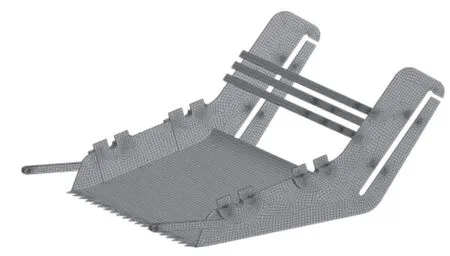
圖2 鏟架整體有限元模型
2 模態分析
2.1 邊界條件
在有限元分析中,零件的邊界條件分為兩種:一種是載荷邊界條件,此條件可根據具體工況計算出載荷的具體數值;另一種是約束邊界條件,約束邊界條件即為該零件與其它零件連接的狀態,只能根據推導過程得到在軟件中設置的約束方式,比如零位移約束,該條件無法計算出具體數值,本研究中鏟架整體的邊界條件即為約束邊界條件。
自由模態分析時,鏟架整體視為無工況條件,即鏟架在無約束邊界的條件下進行模態分析。約束模態分析時,鏟架約束狀態與元胡收獲機工況有關,此時元胡收獲機的工況為:鏟架楔入土壤,收獲機行走過程中鏟架同時受到土壤的阻力和已鏟起土壤的重力作用,土壤的阻力和重力作為激勵因素使鏟架發生振動,該工況條件下鏟架的約束方式為兩側固定架施加固定約束。約束模態邊界條件推導過程如下所示:
由經驗可知[8],任意形式邊界約束條件為:

式中:i、j 為位移分量號,C0、C1為給定常數。經改寫可得到鏟架邊界約束條件,如下式所示。

為處理此約束,先構造如下廣義位移向量:
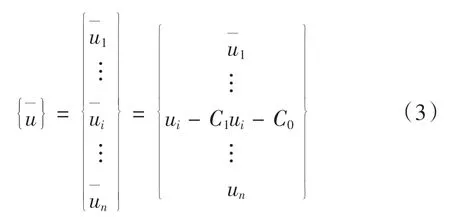
即:
簡記為:

式中{u}為結構位移向量。則結構方程為:

將式(5)代入式(6)可得:

兩端同左乘[λ]T,得:

即:
可得:

通過位移向量變換,任何形式的約束條件都可化為零位移約束來處理。由上述工況條件可知,對鏟架進行約束模態分析時,鏟架的約束邊界條件即約束類型為零位移約束,即將鏟架6 個自由度的位移全部約束為0。
2.2 自由模態分析
自由模態是零件本身在無約束狀態下自由振動的固有屬性。如表1 所示,為元胡收獲機推土鏟前6階模態的固有頻率和最大變形量。

表1 鏟架前6 階自由模態
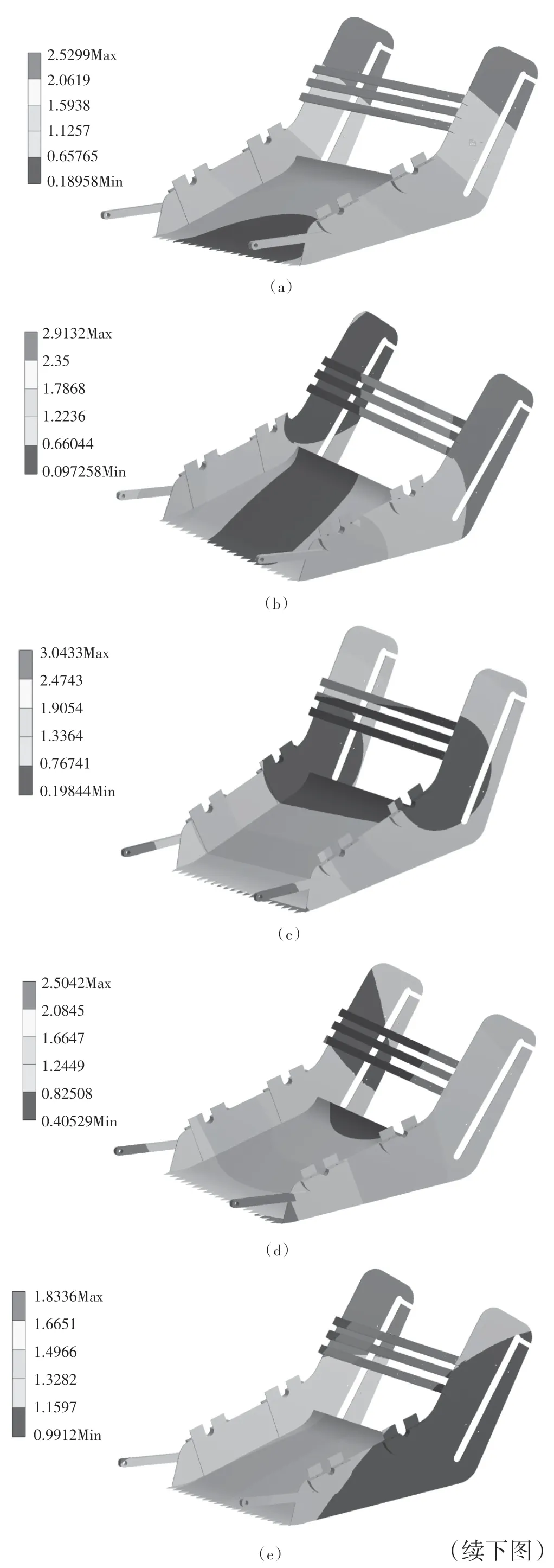
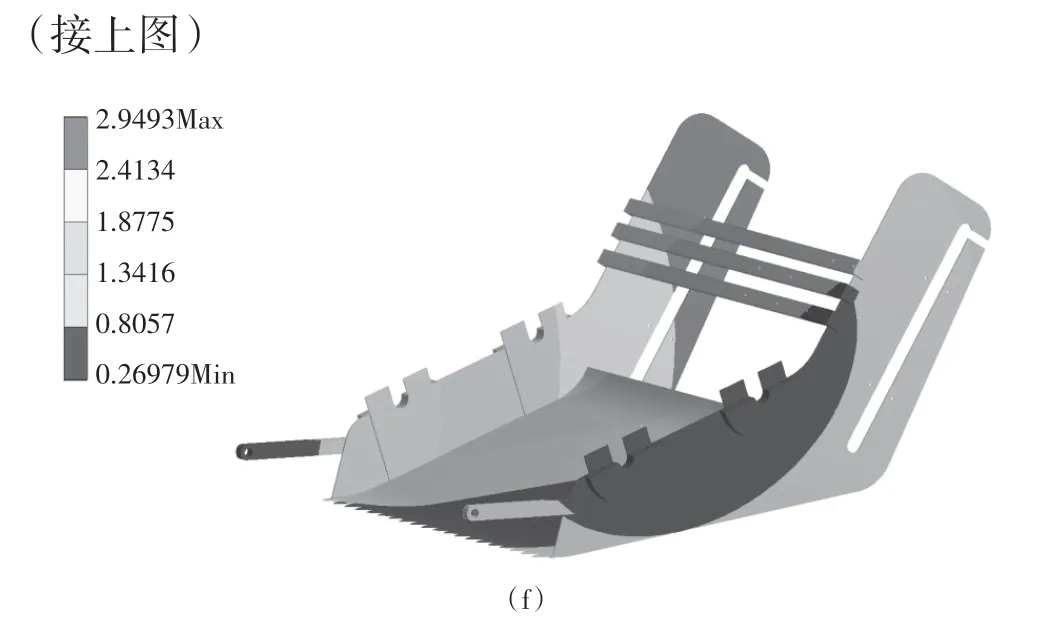
圖3 推土鏟前6 階振型
通過對鏟架自由模態分析可知,鏟架的前4 階模態主要為剛體模態。從圖中可以看出,鏟架的變形主要分布在兩側固定板和鏟前側滾輪支架鏟處,這些區域是影響鏟架振動特性的主要區域,設計時應著重考慮這些頻率,以避開外界激振頻率。從圖c、f可以看出,最大位移分別約為3.043 mm 和2.949 mm,且主要位移發生在兩側固定板與元胡收獲機鉸接處,此處是鏟架的固定部位,對元胡收獲機的可靠性影響最大。
2.3 約束模態分析
約束模態是常見的結構模態,主要表現為零件結構在約束條件下自由振動的固有屬性。在鏟架和機身鉸接處施加固定約束后,對鏟架整體進行約束模態分析,如圖4 所示。
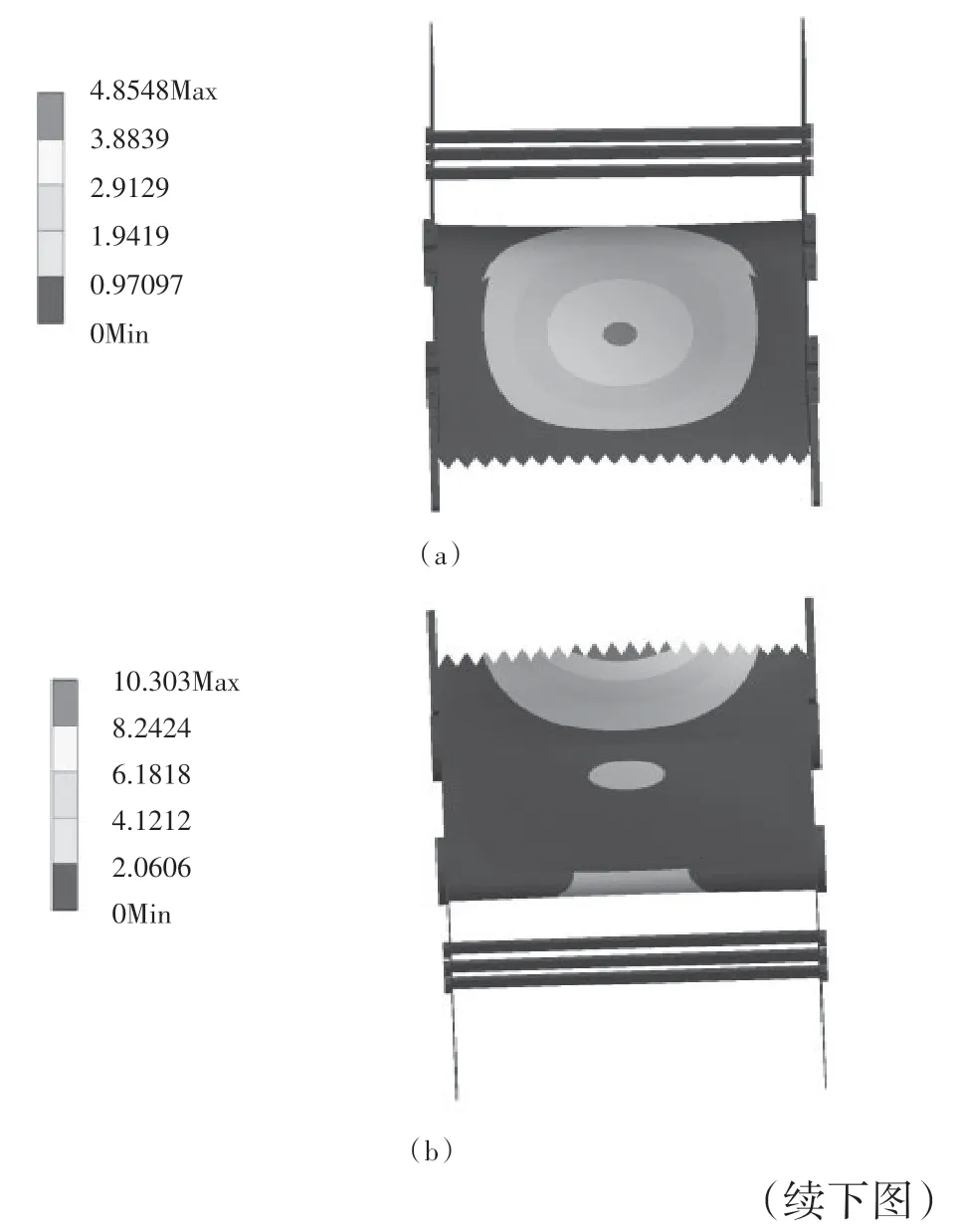
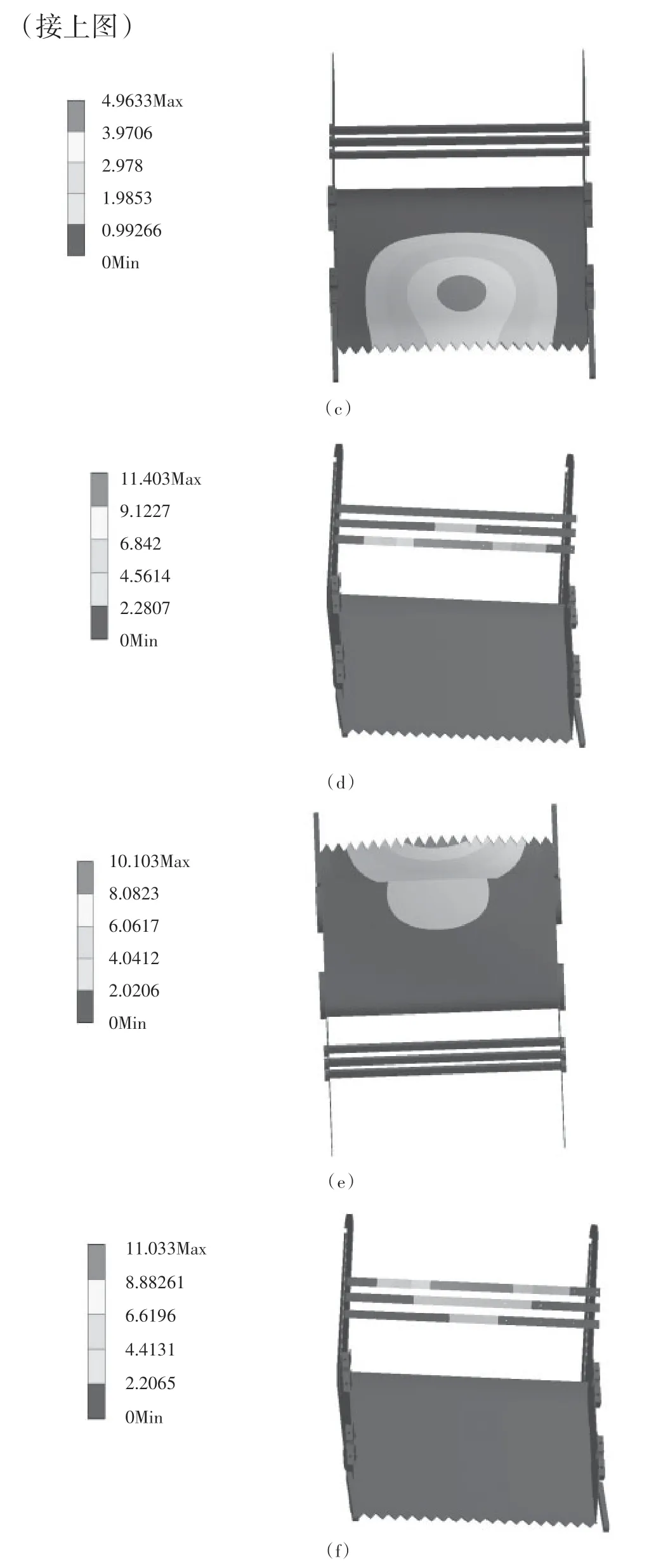
圖4 鏟架前6 階振型
如表2 所示為鏟架約束模態的前6 階固有頻率和最大變形量。
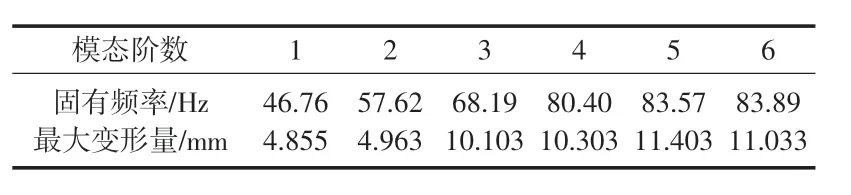
表2 鏟架前6 階約束模態
從圖4 中可以看出,鏟架的第1、2 階變形主要分布在推土鏟中間部位,最大變形為4.963 mm;鏟架的第3、4 階變形主要分布在推土鏟鏟齒中間部位,最大變形為10.303 mm;鏟架的第5、6 階變形主要分布固定板鏈接帶,最大變形為11.403 mm。在兩側固定板和鏟前側滾輪支架鏟處。
綜上,通過對元胡收獲機鏟架自由模態和約束模態分析可知,在元胡收獲機鏟架的設計過程中,應避開元胡收獲機發動機的激振頻率,同時,可在鏟架變形較大的部位增加板材厚度,或通過后續對鏟架進行結構優化使其具有良好的動態特性,從而保證元胡收獲機的可靠性。
3 結束語
建立了元胡收獲機鏟架的有限元模型,用Work bench 對鏟架整體的自由模態和約束摩天進行求解,計算了鏟架整體的前6 階固有頻率,分析了元胡收獲機鏟架的主振型,為元胡收獲機鏟架后續的設計和減振優化提供了一定的理論依據,對提高元胡收獲機的穩定性和可靠性具有重要的理論意義。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18