消防滅火機(jī)器人控制系統(tǒng)的設(shè)計(jì)與研究
2021-01-15 05:50:40李曉賢侯健王奔杜夢(mèng)巖賈陽(yáng)
電子產(chǎn)品世界 2021年12期
關(guān)鍵詞:智能化
李曉賢 侯健 王奔 杜夢(mèng)巖 賈陽(yáng)






摘要:針對(duì)諸如石油化工、油罐區(qū)、大型倉(cāng)庫(kù)、公路隧道、高層建筑等特殊場(chǎng)所滅火困難的問(wèn)題,設(shè)計(jì)了一款消防滅火機(jī)器人,其控制系統(tǒng)包括Android手機(jī)客戶端和基于PIC的控制器,兩者通過(guò)帶路由器的WiFi模塊通信,控制器選用PIC18F46K22單片機(jī)作為主控芯片,采用安裝在機(jī)器人的視頻攝像頭、姿態(tài)檢測(cè)的陀螺儀和紅外避障傳感器,實(shí)現(xiàn)對(duì)左右行走輪驅(qū)動(dòng)電機(jī)和滅火劑噴灑方向控制電機(jī)等執(zhí)行機(jī)構(gòu)的控制,行走自動(dòng)糾偏采用PID控制算法,從而實(shí)現(xiàn)對(duì)消防滅火機(jī)器人的遠(yuǎn)程控制,達(dá)到精準(zhǔn)及時(shí)滅火的目的,對(duì)提高消防機(jī)器人的機(jī)電一體化、自動(dòng)化及智能化具有重要意義。
關(guān)鍵詞:消防滅火機(jī)器人;電機(jī)控制;自動(dòng)糾偏;PID控制;智能化
*基金項(xiàng)目:
1.西安市科技計(jì)劃項(xiàng)目,2019年度高校人才服務(wù)企業(yè)項(xiàng)目計(jì)劃,GXYD17.12;
2.火災(zāi)科學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室開放課題(HZ2019-KF12)
0引言
眾所周知,火災(zāi)不僅危及財(cái)產(chǎn)安全,還會(huì)給人們的生命安全帶來(lái)巨大的損失,因此如何預(yù)防火災(zāi)及快速有效滅火顯得極為重要。對(duì)于一些特殊場(chǎng)合[1],如石油化工、油罐區(qū)、大型倉(cāng)庫(kù)、建筑物等在火災(zāi)發(fā)生時(shí)會(huì)產(chǎn)生大量熱量、煙霧和有毒有害氣體,且頂部建筑結(jié)構(gòu)易坍塌,造成消防裝備及人員無(wú)法靠近;呈圓筒狀結(jié)構(gòu)的公路隧道、高層建筑、地鐵場(chǎng)所,易產(chǎn)生“煙囪”效應(yīng),加劇火災(zāi)蔓延;大跨度鋼結(jié)構(gòu)建筑的冷庫(kù),因其隔熱防潮性能好,見光率大,出入口少且空間密閉,這些都是滅火救援的難題[2]。
針對(duì)以上危險(xiǎn)區(qū)域,若火災(zāi)發(fā)生時(shí)沒(méi)有有效的消防應(yīng)急預(yù)案、合適的滅火救援設(shè)施及裝備,消防員強(qiáng)行進(jìn)入火災(zāi)現(xiàn)場(chǎng)采取滅火行動(dòng),不僅達(dá)不到預(yù)期效果,而且還會(huì)給救援人員的生命安全帶來(lái)嚴(yán)重威脅[3]。近年來(lái),隨著新工藝、新材料和新技術(shù)的發(fā)展,消防滅火機(jī)器人應(yīng)運(yùn)而生。消防機(jī)器人能到達(dá)充滿濃煙、有毒、缺氧等復(fù)雜環(huán)境的火災(zāi)現(xiàn)場(chǎng),根據(jù)設(shè)定好的程序采取合理的滅火措施,最大限度地減少消防人員的傷亡,提高滅火救援的效率,降低火災(zāi)事故的經(jīng)濟(jì)損失[4]。
1總體結(jié)構(gòu)
消防滅火機(jī)器人為自走輪式結(jié)構(gòu)[5],供電采用12V蓄電池;為了便于轉(zhuǎn)向,前輪采用萬(wàn)向輪,后輪采用直流電機(jī)驅(qū)動(dòng)[6];表面涂覆防高溫涂層可深入最危險(xiǎn)的位置,如高溫、爆炸、中毒、輻射危險(xiǎn)的“火海”中偵查火情;其前方裝有視頻攝像頭,用來(lái)識(shí)別尋找周圍環(huán)境中的火焰、煙霧;機(jī)殼內(nèi)部配備滅火裝置,如冷氣溶膠滅火裝置,發(fā)生火災(zāi)時(shí),可通過(guò)噴灑口滅火;若噴灑口未正對(duì)火焰,通過(guò)噴灑方向控制電機(jī)的旋轉(zhuǎn)使噴灑口正對(duì)火焰,從而近距離準(zhǔn)確地對(duì)準(zhǔn)著火點(diǎn)執(zhí)行滅火任務(wù),防止火勢(shì)蔓延,使滅火劑的利用率有了大幅度提高;紅外避障傳感器可以避免機(jī)器人在前進(jìn)過(guò)程中撞到障礙物。此外,配備的視頻系統(tǒng)能將火場(chǎng)的高清圖像傳送到操作平臺(tái)。[1]
消防滅火機(jī)器人的控制系統(tǒng)包括Android手機(jī)客戶端程序和基于PIC單片機(jī)的控制器[7],兩者之間的通信通過(guò)高度集成、低成本的WiFi模塊AtherosAR9331實(shí)現(xiàn)。AR9331采用MIPS24Kc內(nèi)核,裝有OpenWrt操作系統(tǒng)及相關(guān)應(yīng)用軟件的路由器,集成了1個(gè)5端口百兆以太網(wǎng)交換機(jī)、1個(gè)DDR/DDR2控制器,單片即可實(shí)現(xiàn)完整的無(wú)線路由。該WiFi模塊主要功能是實(shí)現(xiàn)Android手機(jī)客戶端與控制器之間的通信:將攝像頭的視頻信號(hào)發(fā)送至手機(jī)客戶端,并將手機(jī)客戶端發(fā)送的控制命令傳輸至消防滅火機(jī)器人控制器。WiFi模塊系統(tǒng)框圖如圖2所示。
消防滅火機(jī)器人開機(jī)后自啟動(dòng),初始默認(rèn)的是自動(dòng)模式,可以自動(dòng)搜尋火源,主動(dòng)避障,精確滅火。當(dāng)檢測(cè)到進(jìn)入無(wú)線模式的命令時(shí),進(jìn)入無(wú)線模式,此時(shí)可以通過(guò)Android客戶端主控界面上的觸摸按鍵發(fā)送相應(yīng)控制命令至WiFi模塊[8],通過(guò)按鍵直接控制消防滅火機(jī)器人的前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)等,并解碼WiFi模塊傳輸來(lái)的視頻攝像頭的圖像信號(hào),將其顯示在手機(jī)屏幕上。
2硬件設(shè)計(jì)
在硬件設(shè)計(jì)方面,消防滅火機(jī)器人控制器選用Microchip的PIC18F46K22單片機(jī)為主控芯片[9]。該單片機(jī)屬于高性能RISC(reduced instruction set computer),精簡(jiǎn)了指令數(shù)目和尋址方式,提高了編譯器的效率,且具有在線串行編程功能,方便開發(fā)者調(diào)試程序。該芯片有35個(gè)I/O引腳[10],最大工作電壓5.5V,引腳既可以3.3V供電,也可以兼容5V。它采用nano Watt XLP的超低功耗管理,空閑、休眠和備用時(shí)鐘模式等多種功耗管理模式可以有效降低消防滅火機(jī)器人的功耗,提高蓄電池的使用時(shí)間。其具有1024字節(jié)數(shù)據(jù)的EEPROM、64k字節(jié)的ROM,最高工作速度16MIPS,數(shù)據(jù)總線為16位寬指令與8位;另有2個(gè)標(biāo)準(zhǔn)脈寬調(diào)制(PWM)模塊、3個(gè)增強(qiáng)型CCP(ECCP)模塊,可輸出2路PWM。
控制器的整個(gè)電路采用模塊化設(shè)計(jì),由電源轉(zhuǎn)換、程序燒寫、WiFi模塊通信、指示燈和晶振、陀螺儀姿態(tài)檢測(cè)、電池電壓檢測(cè)、行走電機(jī)驅(qū)動(dòng)控制、紅外避障控制、滅火劑噴灑電磁閥控制、噴灑方向電機(jī)控制等10部分電路組成。
電源轉(zhuǎn)換電路采用具有很好線性的降壓型開關(guān)電源管理集成電路LM2596,固定輸出直流5V,且可輸出3A驅(qū)動(dòng)電流,為WiFi通信模塊和紅外避障傳感器等供電;因單片機(jī)、指示燈和陀螺儀需要3.3V供電,故選用正向低壓降穩(wěn)壓器AMS1117,其內(nèi)部集成過(guò)熱保護(hù)和限流電路,可有效保護(hù)整個(gè)電路。
程序燒寫電路可以通過(guò)PGD、PGC等引腳將程序燒錄進(jìn)單片機(jī);D2、D3指示燈可以通過(guò)編寫相應(yīng)程序指示相應(yīng)狀態(tài),外部晶振為單片機(jī)提供時(shí)鐘周期;WiFi模塊通信電路可以使控制器通過(guò)串口接收傳輸來(lái)自手機(jī)客戶端的控制指令,從而控制各執(zhí)行電機(jī),亦可將攝像頭視頻信號(hào)傳輸給手機(jī)客戶端。
陀螺儀姿態(tài)檢測(cè)電路通過(guò)MPU6050陀螺儀對(duì)機(jī)器人狀態(tài)進(jìn)行實(shí)時(shí)檢測(cè)[11],單片機(jī)結(jié)合讀取的數(shù)據(jù)對(duì)雙側(cè)行走電機(jī)進(jìn)行獨(dú)立PWM控制,在機(jī)器人前進(jìn)跑偏時(shí)進(jìn)行自動(dòng)糾偏;電池電壓檢測(cè)電路采用串聯(lián)電阻分壓方式對(duì)蓄電池端電壓進(jìn)行檢測(cè),當(dāng)蓄電池欠壓時(shí)發(fā)出報(bào)警聲,實(shí)現(xiàn)蓄電池的欠壓保護(hù);兩側(cè)的行走電機(jī)可通過(guò)脈寬調(diào)制(PWM)技術(shù)控制電機(jī)電樞電壓,實(shí)現(xiàn)調(diào)速[12];行走電機(jī)驅(qū)動(dòng)控制電路通過(guò)雙H橋PWM集成電機(jī)驅(qū)動(dòng)器DRV8412控制行走電機(jī),2路PWM輸出獨(dú)立驅(qū)動(dòng)左右輪的電機(jī),從而完成前進(jìn)、后退和轉(zhuǎn)彎運(yùn)動(dòng),且集成在驅(qū)動(dòng)器內(nèi)部的保護(hù)電路還可監(jiān)測(cè)行走電機(jī)是否過(guò)流;紅外避障控制電路采用集收發(fā)于一體的光電傳感器E18-D80NK-N檢測(cè)障礙物距離[13],通過(guò)電位器旋鈕可以感應(yīng)3~80cm距離內(nèi)的障礙物,從而實(shí)現(xiàn)機(jī)器人自動(dòng)避障。
滅火劑噴灑電磁閥控制電路采用開關(guān)電流方式驅(qū)動(dòng)電磁閥,選用N溝道MOS管Q1和與電磁閥并聯(lián)的電流再循環(huán)二極管D5,當(dāng)單片機(jī)RB1引腳為高電平時(shí),Q1導(dǎo)通,此時(shí)電磁閥打開,滅火劑噴灑;利用MAX14871全橋驅(qū)動(dòng)芯片控制滅火劑噴灑口方向控制電機(jī),發(fā)生火災(zāi)時(shí),若單片機(jī)檢測(cè)到噴灑口未正對(duì)火源,則控制噴灑口方向電機(jī)旋轉(zhuǎn),使其正對(duì)火焰噴灑,從而精準(zhǔn)及時(shí)滅火,提高滅火劑的使用效率。
消防滅火機(jī)器人控制器電路如圖3所示。
3PID算法參數(shù)設(shè)置調(diào)整試驗(yàn)
在控制系統(tǒng)中,由于PID控制算法結(jié)合比例、積分和微分3個(gè)環(huán)節(jié)于一體,成為連續(xù)系統(tǒng)中最為成熟、應(yīng)用最為廣泛的一種控制算法,且PID控制方法結(jié)構(gòu)簡(jiǎn)單,各參數(shù)易于設(shè)置。因此,消防滅火機(jī)器人的行走電機(jī)糾偏算法采用PID控制。在實(shí)際對(duì)消防滅火機(jī)器人行走電機(jī)控制的過(guò)程中,通過(guò)選用不同的P、I、D控制組合,由主控芯片輸出給DRV8412的PWM_A和PWM_C引腳不同占空比的PWM驅(qū)動(dòng)信號(hào),實(shí)現(xiàn)消防滅火機(jī)器人行駛方向的自動(dòng)糾偏。當(dāng)PWM驅(qū)動(dòng)信號(hào)的占空比減小時(shí),則行走電機(jī)兩端的平均電壓降低,電機(jī)轉(zhuǎn)速降低,該側(cè)行走輪速度減慢。PID控制算法框圖如圖4所示。
PID控制算法的表達(dá)式為:
P(t)=Kp[+e(t)1∫te(t+)dtTde(t)]
式中,P(t)為輸出信號(hào),e(t)為偏差信號(hào),即實(shí)際測(cè)量值與目標(biāo)值間的差值,KP為比例系數(shù),TI為積分時(shí)間,TD為微分時(shí)間。
將上式簡(jiǎn)化成離散化PID控制算法的表達(dá)式為:
P(t)=Kp{E(t)+E(j)+[E(k)E(k?1)]}?
在消防滅火機(jī)器人的PID控制算法中,航向角偏差E(t)是時(shí)間的函數(shù),消防滅火機(jī)器人的陀螺儀每300ms檢測(cè)1次偏航角,即?t=T采樣周期,E(k)為第k次采樣時(shí)的偏差值;E(k?1)為第k?1次采樣時(shí)的偏差值;k為采樣序號(hào);P(k)是第k次采樣時(shí)的輸出值。
在消防滅火機(jī)器人行駛過(guò)程中,定義向右偏為正角度,若陀螺儀檢測(cè)到偏航角為負(fù)(機(jī)器人左偏將會(huì)左轉(zhuǎn)),則PID控制算法會(huì)通過(guò)降低右側(cè)行走輪轉(zhuǎn)速的方法,即單片機(jī)輸出的PWM_C和PWM_D兩腳的占空比降低,降低驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速來(lái)糾正行駛方向,因此只需要知道該采樣周期內(nèi)需要調(diào)整的增量信號(hào)即可,若要計(jì)算第k次的輸出量?P(k),需要知道E(k),E(k?1),E(k?2),所以可以采用以下增量型PID控制算法:
?P(k)=P(k)P?(k1)?K=[E(k)E(k?1)]?KIE(k)+KD[E(k)?2E(k?1)+E(k?2)]
式中,KI=KPT為積分系數(shù);KD=KPTD為微分I系數(shù)。
對(duì)于不同系統(tǒng)中的PID控制算法,只需人工調(diào)整KP、KI和KD。為了找到這3個(gè)參數(shù)的最佳值,需要通過(guò)試驗(yàn)進(jìn)行統(tǒng)計(jì)分析。試驗(yàn)采用長(zhǎng)為10m的筆直柏油路(中間不設(shè)置障礙),等分為10個(gè)檢測(cè)區(qū)間,測(cè)量出每個(gè)區(qū)間中車輪痕跡與目標(biāo)軌跡線之間存在的最大偏移距離,實(shí)驗(yàn)數(shù)據(jù)采集示意圖如圖5所示。
根據(jù)PID控制參數(shù)調(diào)整原則:
先調(diào)整比例系數(shù),當(dāng)曲線振蕩非常頻繁時(shí),加大KP,超調(diào)大則減小KP;積分項(xiàng)可以消除系統(tǒng)中周期性的波動(dòng),及時(shí)糾偏,系統(tǒng)糾正周期長(zhǎng)減小KI。由于該系統(tǒng)中左右行走輪采用的直流電機(jī)慣性和滯后性較小,速度改變迅速,因此微分系數(shù)KD的改變對(duì)直線行駛糾偏性能的影響不是很大。經(jīng)過(guò)試驗(yàn)場(chǎng)地多次運(yùn)行調(diào)試,得到當(dāng)給定參數(shù)KP=8、KI=5、KD=1時(shí),消防滅火機(jī)器人直線行駛性能最佳。
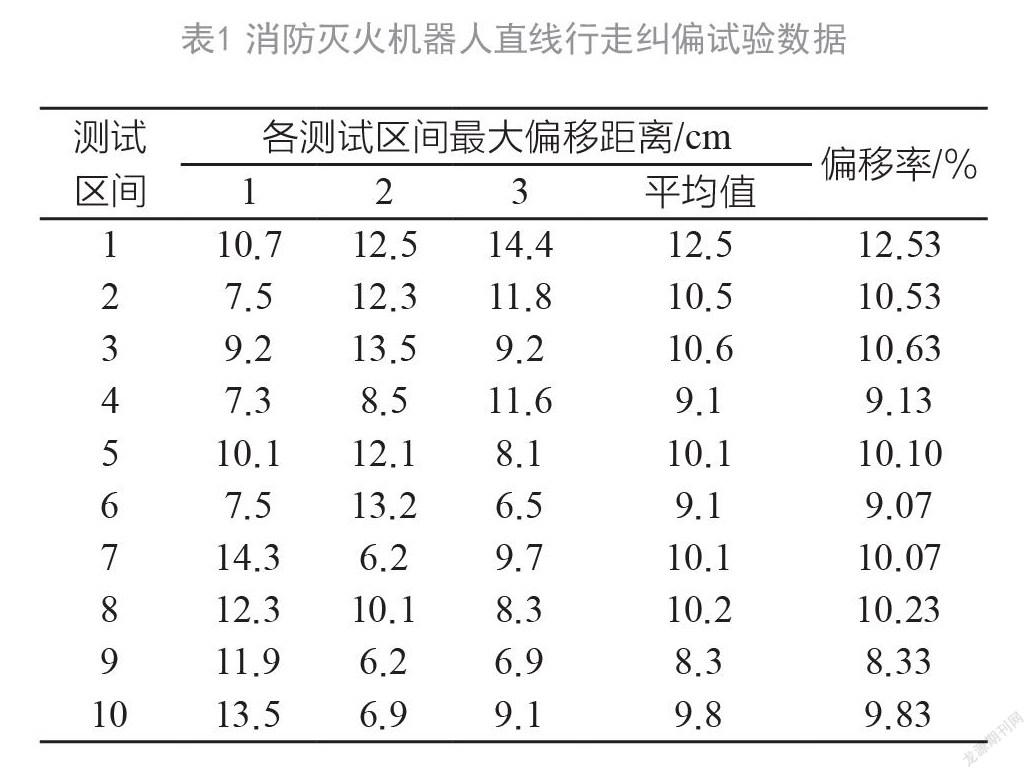
采用最優(yōu)參數(shù)KP=8、KI=5、KD=1時(shí),消防滅火機(jī)器人行走3次,即每個(gè)行走區(qū)間測(cè)取3次試驗(yàn)數(shù)據(jù),并求出每個(gè)測(cè)試區(qū)間的最大偏移距離的平均值,以減小隨機(jī)誤差帶來(lái)的干擾,將統(tǒng)計(jì)出的最大偏移距離作為試驗(yàn)的結(jié)果。試驗(yàn)數(shù)據(jù)如表1所示。
由表1中的試驗(yàn)數(shù)據(jù)可知,在全程10m的試驗(yàn)中,每1m的測(cè)試區(qū)間中最大偏移距離的平均值在8.3~12.5cm之間,偏移率使用最大偏移距離的平均值除以測(cè)試區(qū)間長(zhǎng)度1m,在8.33%~12.53%之間,30組數(shù)據(jù)中最大偏移距離為14.4cm,最小為6.2cm,可以滿足消防機(jī)器人直線行走的需求,因此PID控制設(shè)置參數(shù)合理。
4結(jié)論和討論
消防滅火機(jī)器人基于PIC18F46K22單片機(jī)的控制器可以接收Android手機(jī)客戶端的命令,通過(guò)PID算法進(jìn)行自動(dòng)糾偏,通過(guò)帶路由器的WiFi模塊將攝像頭拍攝到的滅火現(xiàn)場(chǎng)視頻傳輸在手機(jī)屏幕和消防控制臺(tái)顯示,機(jī)器人行走過(guò)程中可以主動(dòng)避障,且可實(shí)現(xiàn)噴灑口對(duì)準(zhǔn)著火點(diǎn)后自動(dòng)滅火劑噴灑,在實(shí)現(xiàn)精準(zhǔn)及時(shí)滅火的同時(shí)提高滅火劑的使用效率。
消防機(jī)器人可以代替人類進(jìn)行高危滅火作業(yè),隨著機(jī)器人智能控制技術(shù)、計(jì)算機(jī)技術(shù)的極大進(jìn)步,相信實(shí)現(xiàn)自主決策、自主行動(dòng)、自我防護(hù)的高級(jí)智能化消防機(jī)器人的誕生指日可待,其未來(lái)將朝著以下幾個(gè)方向發(fā)展:自主智能化;功能多元化,集合偵察、破拆、堵漏、搬運(yùn)、滅火、冷卻等功能;高效節(jié)能化和空間立體化。
參考文獻(xiàn):
[1]張建中,郝允梁,劉海洋,等.基于STM32單片機(jī)的智能消防機(jī)器人的設(shè)計(jì)與應(yīng)用[J].電子技術(shù)應(yīng)用,2017,43(11):120-123.
[2]張晉.消防機(jī)器人結(jié)構(gòu)設(shè)計(jì)及其控制系統(tǒng)研究[D].天津:河北工業(yè)大學(xué),2015.
[3]張偉,阮鵬程,徐岳,等.變電站消防機(jī)器人系統(tǒng)設(shè)計(jì)[J].消防科學(xué)與技術(shù),2020,39(9):1301-1303.
[4]林凡強(qiáng),張陽(yáng),楊文旭,等.基于紅外火焰?zhèn)鞲衅骱妥钚《朔ǖ臏缁饳C(jī)器人[J].傳感器與微系統(tǒng),2015,34(1):110-112,123.
[5]徐連偉,魏崇毓.消防機(jī)器人行走控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].計(jì)算機(jī)測(cè)量與控制,2017,25(1):66-69.
[6]陳曉鵬,李成榮,李功燕,等.基于動(dòng)力學(xué)模型的輪式移動(dòng)機(jī)器人電機(jī)控制[J].機(jī)器人,2008,30(4):326-332.
[7]林向南.基于Android智能手機(jī)的輪椅控制系統(tǒng)設(shè)計(jì)[D].武漢:華中科技大學(xué),2014.
[8]張文亮.基于Wi-Fi的輪機(jī)模擬器測(cè)試系統(tǒng)設(shè)計(jì)和實(shí)現(xiàn)[D].大連:大連海事大學(xué),2016.
[9]PIC18F46K22 datasheet[Z].Microchip Technology Inc.,2007.
[10]劉和平,劉林,余紅欣,等.PIC18Fxxx單片機(jī)原理及接口程序設(shè)計(jì)[M].北京:北京航空航天大學(xué)出版社,2004.
[11]高仲鍇,劉盛鵬.消防機(jī)器人三維姿態(tài)監(jiān)測(cè)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].消防科學(xué)與技術(shù),2014(7):795-797,827.
[12]李曉賢.磁力輪式塑料溫室棚頂清洗機(jī)的設(shè)計(jì)與研究[D].重慶:西南大學(xué),2019.
[13]蔣林,金祖飛,程文凱,等.一種分層模糊控制的滅火機(jī)器人火源尋蹤[J].機(jī)械設(shè)計(jì)與制造,2017(9):49-53.
作者簡(jiǎn)介:李曉賢(1992—),女,漢族,助理工程師,主要從事火災(zāi)探測(cè)、報(bào)警控制和智慧消防技術(shù)的研究,E-mail:2358053655@qq.com。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:14:34
建材發(fā)展導(dǎo)向(2021年10期)2021-07-16 07:13:24
印刷工業(yè)(2020年4期)2020-10-27 02:46:02
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
中國(guó)儲(chǔ)運(yùn)(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國(guó)交通信息化(2017年4期)2017-06-06 07:21:52
中國(guó)公路(2017年12期)2017-02-06 03:07:25
