基于遠程控制的藍牙智能門鎖系統設計
2021-01-18 09:15:50楊秀花秦付軍鄧成中
湖北農機化 2020年22期
楊秀花 秦付軍 鄧成中
(西華大學機械工程學院,四川 成都 610039)
1 系統總體方案
智能鎖系統以CC2540為主控模塊,配以鎖驅動電路、GSM等模塊構成。CC2540是一個超低消耗功率的系統單晶片,其上集成了性能優越的RF收發器,整合了包含微控制器、主機端及應用程序在一個元件上,時鐘電路構成單片機的最小系統來作為系統的聯動控制中心。CC2540主控芯片作為系統的信號輸入端,由L298N芯片布進電機組成的鎖驅動電路作為本系統的輸出端。當手機的藍牙連接成功后,APP經藍牙發出信號,CC2540主控芯片接收到藍牙信號并傳送至系統控制中心進行處理,最后通過作用鎖驅動器實現門禁功能。與此同時,主控芯片反向發出已接收的確認信號,通過藍牙傳送至APP確認接收,利用GSM信息通過SMSC傳輸到信息中心并發到指定的手機。系統的重要設計模塊如圖1所示。
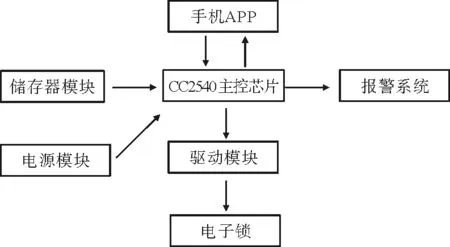
圖1 系統設計模塊結構圖
2 系統的工作設計說明
主控芯片收到信號和指令之后開始工作,如果移動設備的藍牙正確連接信號,控制門鎖的繼電器在接收到信號之后自動將門鎖打開,同時指示燈被接通點亮,一段時間之后后電子鎖的電路又開始重新工作,門自動吸合。如果藍牙信號得不到正確認證連接,則不能控制藍牙模塊,門鎖無反應,從而實現了門禁。藍牙模塊會接收上位機發出的信號,同時傳送給單片機系統指定的引腳,使得繼電器與電子鎖認證連接,從而使電子鎖打開。如果P1.1是高電平以及NPN三極管導通,同時與繼電器的常開觸點相連接,則繼電器的電路吸合使電子鎖電機開始轉動,從而使門鎖打開。
門鎖的復位電路設計。復位是系統單片機的初始化功能,目的是使單片機從0000H單元就開始進行程序執行。除了剛進入系統時的初始化功能外,也為了避免程序運行過程中出現的錯誤或者操作的失誤導致系統的整體鎖死,因此需要系統的復位,即重新啟動系統。本設計采用AT89S52芯片,因其中帶有復位電路,系統復位方式分自動和手動,本設計采用手動復位。
門鎖時鐘電路的設計。在時序指令使得各個信號按照時序關系進行工作,因此時序是程序正常執行信號的關鍵。系統中的時鐘電路產生時鐘信號從而使單片機有序地工作,為了確保單片機進行同步工作,單片機的電路必須依照一定的時鐘電路進行控制。
3 軟件程序設計
本設計的關鍵程序主要是門鎖控制系統軟件和移動藍牙客戶端軟件,門鎖控制系統軟件固定鑲嵌在門鎖芯片中,其利用C語言進行源代碼的編寫,移動藍牙客戶端軟件做成軟件安裝包工移動設備安裝,其利用用Java語言進行源代碼的編寫。
當門鎖控制系統的電源被接通之后,單片機開始進行正常的初始化工作,初始化工作完成后會發出地址匹配、安正密碼等相應的認證信息到藍牙模塊,當藍牙的串口模塊設置為從模式時,門鎖控制系統將能夠與主設備進行互相信息掃描和地址匹配。門鎖的開關狀態由隈位開關進行檢測,然后主控芯片對按鍵的情況繼續進行檢測驗證,再根據檢測的情況進行相應的開鎖、閉鎖動作。
移動藍牙設備與門鎖控制系統通過密碼驗證后,兩者通過加密的方式進行信息傳送。有了信息傳輸的密碼認證,則通過主設備端移動藍牙客戶端軟件即可對門鎖控制系統進行相應的指令操作,從而實現開鎖和閉鎖等遠程操作功能。
4 數據采集、運輸與處理
本系統的數據采集是利用芯片發送采樣信息頻率到數據采集的模塊,當書模塊接收到信息之后再將信息傳輸給CC2540單晶片,同時進行各類處理分析。藍牙無線數據采集模塊主要由數據采集、無線傳輸、終端接收等單元構成。數據采集模塊與門鎖控制系統安裝在現場,并由電池電源進行供電,數據采集模塊可通過設定指令自動完成數據的采集。輸入信號經過信號調理電路后送入數據采集芯片,再通過數據采集模塊繼續傳輸至單片機中,單片機通過藍牙芯片連接的串口,從而使數據通過藍牙進行無線傳輸。數據的遠程傳輸主要采用GSM通信技術實現,將數據通過GSM短消息格式將傳輸到遠程監控中心,從而達到對門鎖狀態的實時監控功能。數據處理利用特定應用數據(內建應用)和設置(內建應用和第三方應用),例如藍牙識別的距離等,同時可利用通用系統設置,例如密碼設置等。
5 結語
本文介紹了基于遠程控制的藍牙智能門鎖系統的設計原理和工作模式,并給出了程序軟件設計的方式和數據采集運輸的方法。本文充分利用了手機等智能設備的藍牙功能,實現了對門鎖的智能遠程控制,避免了無線射頻門鎖伺服狀態下的電力消耗。通過智能藍牙設備能夠實現對門鎖的開、關等遠程操作功能,實現了系統的安全便捷、成本低廉的系統特征,具有較大的實際應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
