
微型電動轎車再生制動分析*
2021-01-18 06:54:10龐小蘭邱梓楠
機電工程技術 2020年12期
龐小蘭,邱梓楠
(1.廣東理工學院,廣東肇慶 526100;2.山東天博食品配料有限公司,山東濟寧 272067)
0 引言
純電動汽車續駛里程短的缺點嚴重制約了其發展,再生制動技術利用驅動電機回收制動能量,能夠有效提升車輛的能量利用率,延長續駛里程[1]。其工作是在電動轎車處于減速或制動工況時,由于慣性作用車輛繼續行駛,而電機處于發電狀態,將部分動能轉換為電能儲存到動力電池中以重復使用的過程[2]。現在,世界各國和各大轎車品牌都十分重視再生制動技術的發展,如日本國家環境協會的經濟性車實現了再生制動和液壓制動的協調控制;豐田普銳斯再生制動受整車ECU控制,可以根據制動力矩需求和實際可用的再生力矩,決定摩擦制動力的大小;Volt 電動車提供了再生系統,可以更為方便地控制能量回收,提高回收力度[3]。國內的奇瑞、比亞迪等電動轎車公司均擁有再生制動系統。本文從再生制動的控制策略和制動回收效率等方面研究,從而提高電動轎車的能量使用效率,使電動轎車的巡航里程數有了較大的提升。
1 微型電動轎車再生制動基本原理
再生制動又稱再生回饋制動,其原理是轎車在制動時電動機變為發電模式,同時通過傳動系統接收轎車行駛時產生的慣性能量,使得電動機轉子產生動能,電動機將轉子上的動能轉換為電能,并將其通過逆變器的反向二極管回饋到直流側,為儲能系統充電,實現能量的再生利用。與此同時,電動機切割磁感線產生的反作用力又可通過產生的電機制動力矩通過傳動系統對驅動輪施加制動產生制動力,使傳動系統形成制動力,對驅動輪施加制動,從而達到了制動的目的。
再生制動基本結構如圖1 所示,當駕駛員踩下制動踏板減速時,電泵開始工作,通過液壓調壓器傳輸和調節液壓制動力,液壓傳感器接收到信號變化時,就使轎車開始制動控制。調壓閥開始工作,信號傳遞給ABS控制系統,調節制動力的大小防止車輪抱死。于此同時,再生制動控制系統開始工作,其會根據電動轎車所需的制動力調節機械軸動力和再生制動力的大小,按照一定比例為轎車提供制動;然后會回收車輪上溢出的能量,轉化為動能驅動電動機發電,電動機產生的能量一部分轉化為再生制動力繼續提供給車輛制動,而另一部分則以電能的形式傳輸到蓄電池存儲。
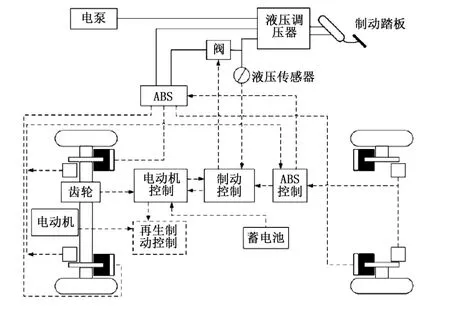
圖1 典型微型電動轎車再生制動基本結構
2 微型電動轎車再生制動影響因素分析
微型電動轎車再生制動功能在實際行駛時會受到各種因素的影響,不能達到最佳工況,所以并不是所有制動能量都能被回收利用。因此在一般工況下,以下這些因素會影響電動轎車的再生制動效率。
(1)儲能裝置
蓄電池作為最常用的儲能裝置,在實際使用時因為不同的因素限制,其存儲和釋放電能的效率會受到影響。從表1可以看出,首先不同電池的額定電壓不同;其次是當其比能量不同時,也就是蓄電池反應時單位質量的電極材料放出電能多少不一樣,導致在相同體積電池反應時釋放電能多少不一樣。所以比能量越高,放出能量就越多,參與再生制動能量越高。而能量密度越高,則單位體積的電池所儲存電量越高,就是回收再生制動能量就可以越多。還有電池的壽命長短更是重要,直接影響了整車的使用時間。因此對于以蓄電池為儲能裝置的純電動轎車,蓄電池的狀態對轎車的再生制動效率有很大的影響。
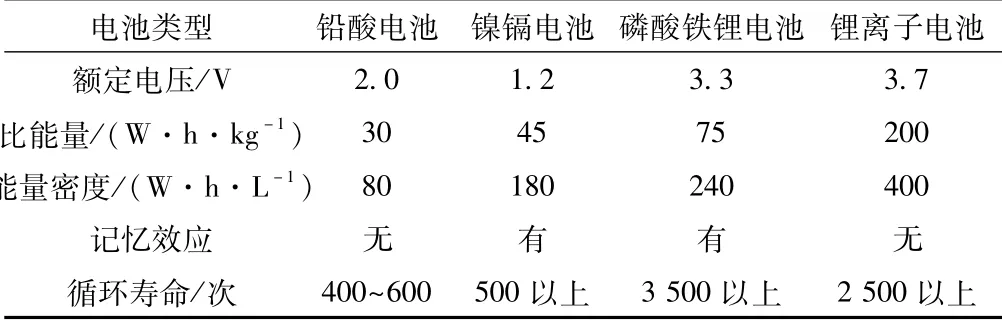
表1 蓄電池類型
(2)驅動形式
驅動形式不同就是轎車的驅動輪數不同,而對于電動轎車來說,再生制動只作用在驅動輪上,只有驅動輪上才能夠回收制動能量。而從動車輪因為是單純的機械制動,所以不存在制動能量回收。因此驅動輪的多少決定了回收能量的多少,從而影響了能量回收的效率。所以四輪驅動電動轎車的再生制動效率會比前輪驅動或后驅動的高。
(3)電機性能
采用電機驅動的電動汽車易于快速準確控制轉速、調節轉矩,能夠實現制動能量回饋[4]。電機是產生再生制動力的主要工具,所以電機的性能直接影響再生制動的效率。當電動轎車制動時,電機產生的再生制動力的多少會影響到轎車的制動力分配。不同的電機性能和類型不同,其轉速、功率、峰值、質量等因素都會影響回收能量的大小,因此選擇合適的電機可以提高再生制動率。如表2 所示,當電機峰值效率越高,單位時間內做功越多,則產生的電能越高,回饋到電池內存儲的電能就越多。且電機的可靠性保證了電機在工作時不會因為溫度過高而有冷卻時間,或者運行時出現故障導致再生制動效率降低。所以電機的性能也是影響再生制動的關鍵因素之一。

表2 電機類型及性能
(4)行駛工況
電動轎車在行駛時的行駛工況也會影響轎車的再生制動率。如在城市的路況下,因為車輛數目多,導致道路擁擠,加上存在行人等因素,轎車的制動次數較多,轎車的制動頻頻率高,代表著轎車的再生制動次數多,再生制動次數多就可以回收更多制動時產生的能量。而在高速公路或鄉間公路的行駛路況下,因為車輛和行人都少,那么轎車制動次數就少,回收制動的能量就少。
(5)控制策略
對于市面上一般的電動轎車來說,再生制動控制策略主要是為了可以合理分配再生制動力和機械制動力的比例,使轎車在滿足總制動力要求下,盡可能多地回收溢出的能量,回饋到蓄電池中。可是不同的控制策略會產生不同的效果,如理想制動力分配控制策略,其制動穩定性好,可回收的能量有限。而最小二乘法的最優制動控制策略就是舒適性一般,可回收的制動能量大。
除上以上幾個主要影響因素外,適合的環境溫度和駕駛工況、良好的駕駛習慣、合理的設計匹配等有利于提升制動能量回收效率[5]。
3 微型電動轎車再生制動能量流動過程分析
在電動轎車行駛的過程中,能量會不停地流動和轉化,來應對各種工況和提供給車上一些附件使用。為了分析出影響電動汽車中制動能量回收的具體因素,對電動汽車在制動狀態下產生的能量以及能量流動展開分析[6]。
驅動過程:轎車在驅動過程中,作為車上唯一的能源裝置,蓄電池就會開始放電(有放電損耗),電能一部分給空調等附件使用,另一部分傳遞給電機,供電機運作。電機接收到電能后,把電能轉化為動能(電機運作時有機械損耗),經傳動系統傳遞給驅動軸(有傳動損耗),驅動軸驅動車輪克服空氣阻力、摩擦阻力等阻力后,化為整車的動能,驅動轎車行駛。
制動過程:當轎車制動時,整車的動能一部分被機械制動所消耗,另一部分經傳動系統(有傳動損耗)流向電機,此時電機反向運作,由驅動模式改為發電模式,為蓄電池充電(有充電損耗),把動能轉化為電能經過電線流向蓄電池,把回收的動能存儲在蓄電池中,完成能量回收。
4 微型電動轎車再生制動效率分析
在電動汽車制動時,機械制動力為F機械制動力,再生制動阻力為F再生制動阻力,汽車行駛時的阻力和為F,電動汽車減速至0所需要的合力為F合。則:

式中:C為空氣阻力系數。

式中:f為地面摩擦因數。
以物理的動能方程式說明當電動汽車行駛的速度越快,汽車的動能就越高。

式中:Ebreaking為電動汽車開始剎車時所具有的動能,v為開始的減速度。
電動汽車在剎車過程中,需要將動能轉移,其中轉移的能量包含空氣阻力等各種阻力所消耗的能量之和為EF,機械制動所消耗的能量為E機械制動,制動回饋的能量E制動回饋。因此,可以回收的能量則為電動汽車的總動能量減去由行駛阻力所消耗的能量和機械制動所消耗的能量。可回收的能量同時受到電機的效率影響,故設電機的效率為K,則再生制動能量可用下式表示:
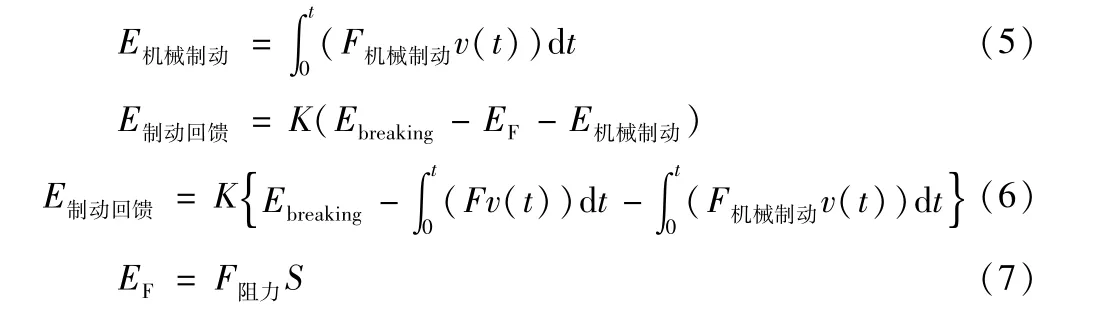
式中:S為制動距離。

因此當轎車制動時,轎車的整備質量不變時,制動過程損失的動能就是隨車速的變化而變化,車速變化越大,損失的動能就越大,當轎車的電機功率和蓄電池功率在制動時沒發生變化,制動器處的機械制動消耗的能量越少,也就是再生制動力占總制動力的比例越多,則再生制動功率越大,那么在制動過程結束時存儲在蓄電池中的能量越多,制動能量回收效率越高。
5 微型電動轎車再生制動控制策略分析
再生制動控制策略就是通過一定的方法,完成轎車在行駛過程中機械制動力和再生制動功力的分配。一個理想的再生制動策略可以提高轎車的再生制動效率和能量回收率。
(1)理想制動力分配控制策略主要原理是根據轎車的行駛工況,準確地檢測到轎車前后軸的各自所需制動力,然后控制轎車的總制動力以理想分配曲線I分配到轎車的前后輪上,從而獲得最大的制動力和最優的制動穩定性。圖2 所示為理想制動力控制策略的前后輪制動力變化情況。
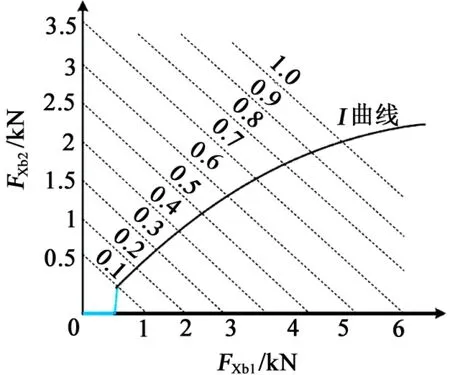
圖2 理想制動力分配控制策略變化曲線
(2)并聯控制策略的原理是將轎車總制動力分配給再生制動力和摩擦制動力,二者共同作用,從而滿足轎車制動需求,其中,摩擦制動力以定比分配的方式作用在轎車前后軸上,電機再生制動力作用在驅動軸上,制動時,傳感器檢測制動主缸內的油壓大小,檢測到的數據經控制器換算為需求再生制動力,并將其傳輸給電機控制器,通過其控制電機提供需求再生制動力[7]。
(3)最小二乘法的最優制動控制策略的原理轎車在制動時,在不發生抱死的前提下盡可能多地把制動力分配給車輪,在前后軸制動力之和滿足制動的總制動力需求下盡量采用電機制動,用再生制動力來對轎車進行制動,以此達到最大程度地回收轎車在制動過程中的能量。
(4)模糊邏輯控制策略是以一種智能化的算法去制定一個理想的控制器,解決一些數學模型無法很好表達的問題,再生制動的引入會影響電動汽車制動時的安全性與穩定性。為了在解決上述問題的同時最大限度回收制動能量,針對純電動車結構特點,建立了再生制動模糊控制器,提出了基于模糊控制的再生制動控制策略[8]。
根據再生制動控制策略優缺點分析,不難看出理想制動力分配控制策略和并聯控制策略能量回收的效果較差,不符合最優再生制動控制策略。而最小二乘法的最優制動控制策略和模糊邏輯控制策略回收效果較好,以比亞迪E6純電動轎車為實驗車型,比較兩種策略的再生制動能量回收效果。
以最小乘二法的最優制動控制策略的原理和以模糊邏輯控制策略的原理分別對比亞迪秦的再生制動做了實驗,測試了比亞迪E6 在兩種控制策略中的再生制動能量回收效率。從比亞迪E6 的車輛制動測試可以得出如表3 所示的數據。由表可以看出,當制動強度小的時候,模糊邏輯控制法的回收效率優于最小乘二法的最優制動控制策略;可當制動強度上升的時候,最小乘二法的最優制動控制,策略的回收能量開始有了明顯的增長,并且回收效率高于模糊邏輯控制策略。
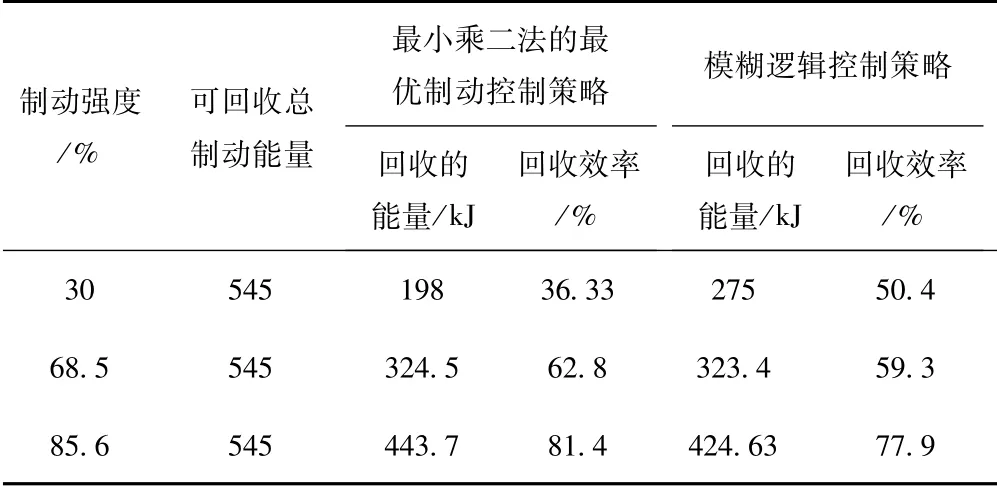
表3 比亞迪E6 制動測試
在中國,汽車保有量基數大,在路上的車輛多、路況復雜,所以導致轎車的制動頻率大,因路上的行人、單車和摩托車等在路上穿插,當轎車在30~50 km/h的車速下,司機為了躲避那些會產生危險的因素時,很多時候制動強度都會較大或者完全剎停轎車,那么在大的制動強度下,最小乘二法的最優制動控制策略的能量回收多,回收效率高,所以為最優制動策略。
6 結束語
本文對微型電動轎車再生制動的技術進行了分析,其內容主要包括了再生制動技術的工作原理、對再生制動技術的影響因素進行分析以及微型電動轎車再生制動系統運行時能量的流動過程分析。并對微型電動轎車制動控制策略進行了分析,先簡述了何為理想再生制動的控制策略,再分析了多種典型的再生制動控制策略的優缺點,最后測試了典型車型在特定環境下的再生制動回收效率,得出了最優再生制動控制策。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
甘肅教育(2020年14期)2020-09-11 07:57:42
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
山東冶金(2019年3期)2019-07-10 00:54:04
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
消費導刊(2018年10期)2018-08-20 02:57:02
人大建設(2018年2期)2018-04-18 12:17:00
通信電源技術(2016年1期)2016-04-16 04:57:26
時代英語·高二(2015年1期)2015-03-16 00:08:11
