水下無人航行器裝備技術發展與作戰應用研究
2021-01-19 08:10:30劉洋陳練蘇強劉長菊賴鳴
艦船科學技術 2020年12期
關鍵詞:能力
劉洋,陳練,蘇強,劉長菊,賴鳴
(中國船舶集團有限公司第七一四研究所,北京 100101)
0 引 言
世界范圍內開展水下無人航行器研發的國家主要為美、俄、歐亞各國等,其中以美國在役數量最多,在能源動力、自主控制、導航精度及水聲通信等關鍵技術均處于領先水平,已形成系列化產品或裝備,廣泛應用于軍民各領域。據蘭德公司2019 年統計數據顯示,全球已研制完成航行器超過160 型,其中重量在2 t 以下的數量比例超過50%[1]。
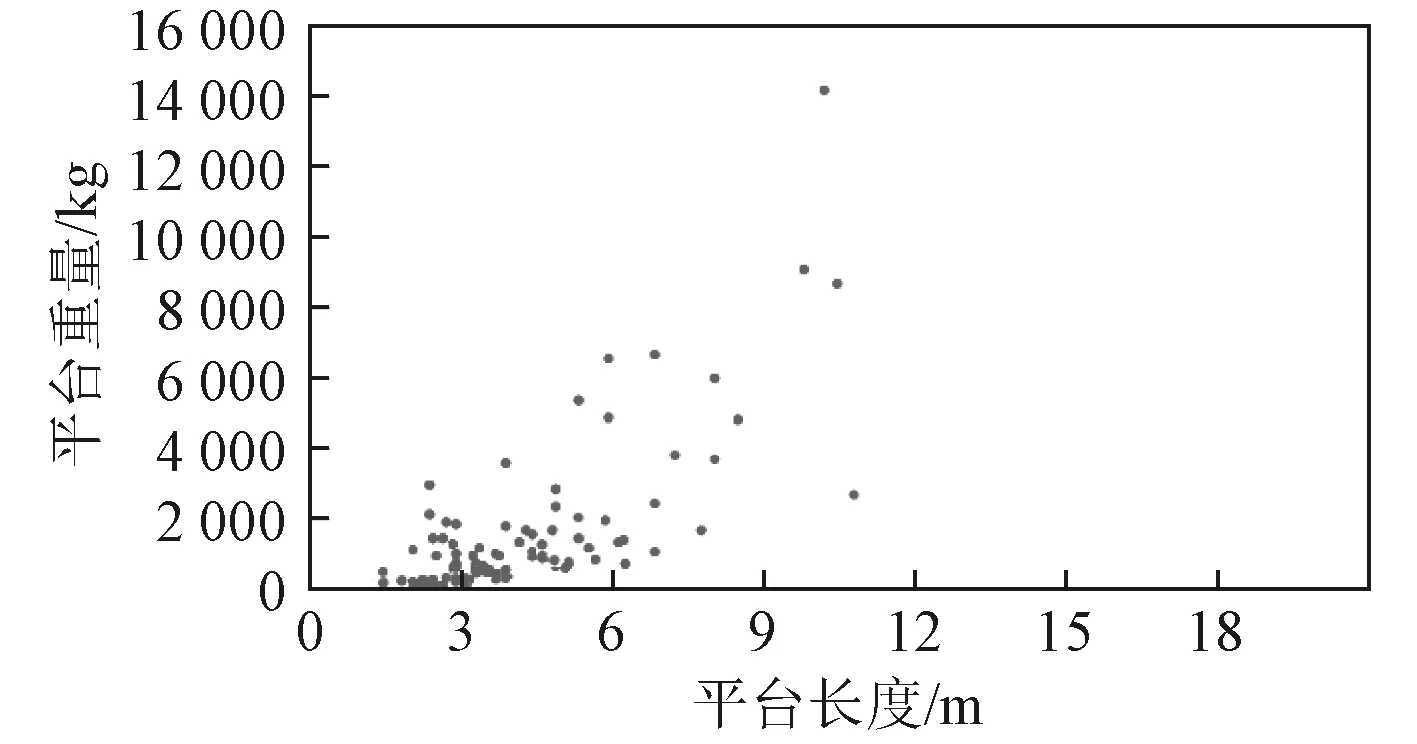
圖 1 國外水下無人航行器尺寸重量分布Fig. 1Size and weight distribution of foreign underwater unmanned vehicles
軍用水下無人航行器全球已列裝和在研約50 型,按照美海軍劃分標準統計[2],可分為超大型2 型、大型22 型、中型20 型、小型11 型。其中,中小型主要用于情報監視偵察、反水雷、誘餌欺騙、海洋調查等,大型兼具運載、反潛反艦、電子戰等能力,超大型將進一步具備直接打擊與對抗等作戰能力。
1 國外發展現狀
現階段,美國軍用水下無人航行器以小型、中型、大型和超大型為發展序列,其中大型、超大型無人航行器尚處于研制驗證階段,未來將重點拓展作戰能力、探索作戰形式;中小型無人航行器已完成MK18 系列中小型反水雷航行器、“刀魚”中型反水雷航行器、LBS-G 中型戰場感知水下滑翔機等裝備的列裝,具備反水雷、情報監視偵察、海洋環境探測等實際作戰能力,未來將進一步提升作戰效能。超大型航行器方面以“虎鯨”超大型無人航行器為發展重點,2019 年美海軍正式啟動5 艘“虎鯨”研制建造計劃,以美國波音公司“回聲-航行者”型超大型無人航行器為基礎進行研制,該型航行器2017 年開始初次海試,長16 m,重50 t,潛深3 300 m,采用混合式可充電電力系統,續航力6 個月,并裝配長達10.2 m 的模塊化有效載重艙,主要用于執行情報監視偵察、反水雷、時敏打擊任務,全部5 具將至2022 年完成交付[3]。

圖 2 國外水下無人航行器典型裝備Fig. 2Typical equipment for foreign underwater unmanned vehicles
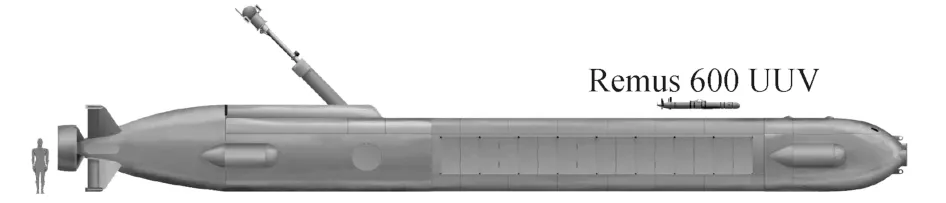
圖 3 “虎鯨”超大型無人航行器平臺概念圖Fig. 3The diagram of Orca XLUUV
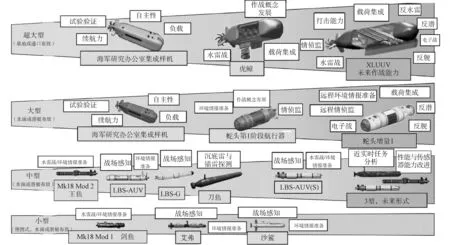
圖 4 美國軍用水下無人航行器發展規劃Fig. 4U.S. military UUV development plan
大型航行器方面以“蛇頭”大型航行器為發展重點,2016 年海軍研究辦公室完成900~1 100 n mile 長航時試驗,排水量約10 t,直徑約1.5 m,續航30 d 或更長,計劃能夠由“弗吉尼亞”級潛艇改裝的導彈發射筒發射。2017 年美海軍正式啟動2 具“蛇頭”大型航行器原型樣機研制,計劃2021 財年完成下水,2025年前達到全速生產;中型航行器方面2020 年發布中型航行器發展需求,計劃研發兼具水面與水下魚雷管布放回收、反水雷與海洋環境感知能力的新型中型航行器;小型航行器方面以Remus 300 型航行器為原型,開展下一代小型航行器研制論證工作[4]。
俄羅斯方面,2017 年發布《2030 年前國家海軍行動基本原則》,將水下無人航行器作為2025 年后裝備建設重點。目前,俄海軍正穩步推進大型、小型航行器發展,并創新發展核動力無人航行器。大型航行器以“大鍵琴”系列無人航行器為基礎研制[5],2018 年完成集成化任務載荷設計與測試,其“大鍵琴”II 型航行器長度6.5 m,直徑1 m,重3.7~4 t,航程約50 km,可由特種潛艇搭載,用于執行北極地區海洋調查與水下特種作業等多項任務。小型航行器以“護身符”、“朱諾”等航行器為基礎,其中“朱諾”長2.9 m,直徑0.2 m,重約80 kg,續航力6 h;“護身符”長1.6 m,直徑0.16 m,重25 kg,航程15 km,續航力6 h,升級版長度1.45 m,重17.5 kg,2019 年進行了軟件和導航系統升級以適用于執行情報監視偵察等作戰任務。核動力無人航行器重點發展具備水下核打擊能力的“波塞冬”核動力航行器,并列入俄羅斯2018-2027 國家武備計劃,計劃10 年內完成列裝。
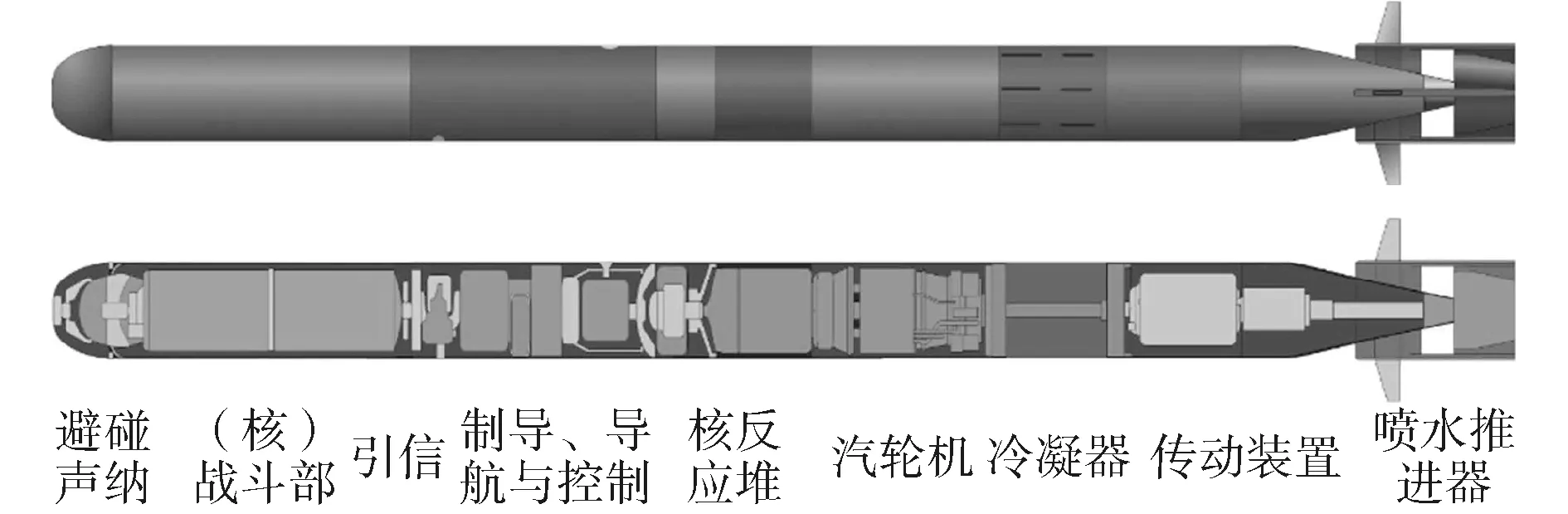
圖 5 “波塞冬”核動力航行器結構示意圖Fig. 5The diagram of "Poseidon" nuclear-powered aircraft
歐洲國家方面重點規劃反水雷、反潛型水下無人航行器發展,典型國家有挪威、瑞典、法國、英國等。挪威以“休金”、Remus 系列航行器為重點[5],發展航行器反水雷、海洋環境探測等能力;瑞典以AUV62 系列無人航行器為基礎,重點發展航行器反水雷及反潛戰訓練能力[5];法國以中小型航行器為發展重點,主要應用于反水雷作戰,其中法國ECA 公司研制的ALISTER 9 型航行器,長1.7~2.5 m,重量50~90 kg,續航力24 h,航速3 kn、主要用于反水雷,已列入法國海軍采購計劃;英國以超大型無人航行器為發展重點,2019 年提出超大型航行器發展計劃,以現有S201 型載人潛水器為基礎平臺研發,計劃長度為30 m,直徑2.5 m,重約70 t,采用燃料電池,最大航速12 kn,續航力為3 個月,航程約為5 500 km,主要用于情報監視偵察和反潛等任務。

圖 6 英國超大型無人航行器概念圖Fig. 6The conceptual drawing of British XLUUV
亞洲國家積極發展軍用水下無人航行器。韓國尚無軍用無人航行器服役,2019 年提出大型反潛型航行器發展計劃以應對朝鮮水下潛艇威脅,該型航行器計劃長約9 m,采用燃料電池續航能力可達30 d。日本民用無人航行器技術水平較高,軍用產品以采購為主,目前重點開展反水雷型航行器研制。印度水下無人航行器研發水平有限,2017 年提出8 具長航時航行器采購列裝計劃,規劃至2021 年組建水下無人航行器中隊。
圖 7 韓國大型反潛型水下無人航行器概念圖Fig. 7Concept of South Korea's large anti-submarine underwater unmanned vehicle
2 典型作戰運用
目前,國外列裝軍用無人航行器以執行情報監視偵察、反水雷、海洋環境探測、誘餌等任務為主[6]。以美國為例,已在廣域海洋環境信息搜集、局部海域長期情報監視偵察、高效無傷反水雷等方面具備較強作戰能力,正在逐漸向聯合協同作戰過渡,積極發展協同反潛和水下打擊等任務能力,作戰定位逐漸由戰場保障轉向水下作戰的關鍵要素,使命任務也隨之大幅拓展。
1)海洋環境探測
航行器配置溫鹽深測量儀、海流剖面儀、磁向傳感器等負載,按預設模式執行任務,測量收集海洋環境數據,支撐海戰場環境建設。水下滑翔機作為一種低功耗長航時航行器在海洋環境探測領域得到廣泛應用,可由水面艦艇在任務區外布放,任務海區利用任務負載收集水下環境數據,并定期上浮至水面發送數據、接收指令,校準位置與航線信息。多個滑翔機組成觀測陣列可進行大范圍、長時間同步觀測。2006 年美海軍利用“布法羅”號核潛艇首次實現滑翔機布放,利用5 天時間對夏威夷瓦胡島海域海洋環境信息進行搜集。2010 年美海軍將水下滑翔機作為制式裝備,累計采購180 余臺,已用于冰下、遠海、近海等多個區域綜合海洋觀測體系,并計劃配備部分“阿利·伯克”級驅逐艦。2011 年美海軍3 臺滑翔機首次參加意大利西西里海域反潛演習,進行了1 000 次傳導性、溫度、深度(CTD)測量,覆蓋范圍是水面艦船的10 倍。2016 年美利用偵察船在南中國海投放1 臺LBS-G 型滑翔機執行偵察任務。
2)反水雷
航行器配置探測負載與小型武器,自主航行至雷區,自主協同搜索定位水雷,引爆滅除水雷,或將水雷位置回傳,用于規劃安全航線。2003 年伊拉克戰爭期間,美海軍第一特種清掃隊利用REMUS 100 型航行器進行了探雷實戰驗證。2014 年美國國防供應商基于“金槍魚”系列航行器進行了編隊反水雷作戰效能評估。2017 年美海軍完成“刀魚”反水雷航行器在不同深度獵雷能力測試。
3)情報監視偵察
航行器配置光學和聲學設備,抵近傳統平臺難以進入或有爭議的航道、港口和基地等目標附近,執行偵察監視、艦艇特征信號測量等任務。利用單航行器或航行器集群部署在距離對抗方港口近海區機動航行,執行監視、信號情報收集、港口圖像掃描、水下地形測繪等任務,形成持續對岸監視態勢。2018 年美盟國沙特成功運用REMUS 600 型無人航行器進入也門海域,抵近完成高清圖像拍攝,成功支持沙特情報監視偵察作戰任務,驗證了其作戰使用。
4)區域探潛
航行器配置探測與通信載荷,航行至目標區域,按照預設任務模式自主避障巡航,探測載荷搜索敵方目標,將數據回傳至母艦。典型作戰應用包括近海持續水下監視系統(PLUSnet)與深海反潛探測網絡。其中,近海反潛探測網絡。網絡由多型、多個無人航行器組成,由潛艇機動布放,航行器間可相互通信,按預定路徑巡邏,潛艇可根據需要實時對航行器航線進行調整,可實現區域監視探測任務。深海反潛探測網絡。網絡由固定式海底聲吶陣和數十個航行器組成,航行器由母艇布放,座居海底構成橫豎交錯的聲吶“星座”,自下向上監測,在6 000 m 水深處多個航行器組成的“海底星座”,可實現廣域監測。
5)水下打擊
航行器配置武器或武器發射艙,在己方其他兵力指揮控制或自主決策下,對艦艇目標實施快速打擊。典型作戰概念為大型航行器察打一體系統,該系統由大型航行器攜帶分布式傳感器網絡和輕型魚雷構成,航行器由潛艇導彈發射筒攜帶布放,自主航行至指定作戰區域潛伏在海底,搭載8 對智能傳感器和最多4 枚輕型魚雷,自主布放光纜與傳感器形成網絡,并通過光纜與航行器連接開展區域探測,發現可疑目標并確認后航行器即可發射魚雷攻擊[7]。
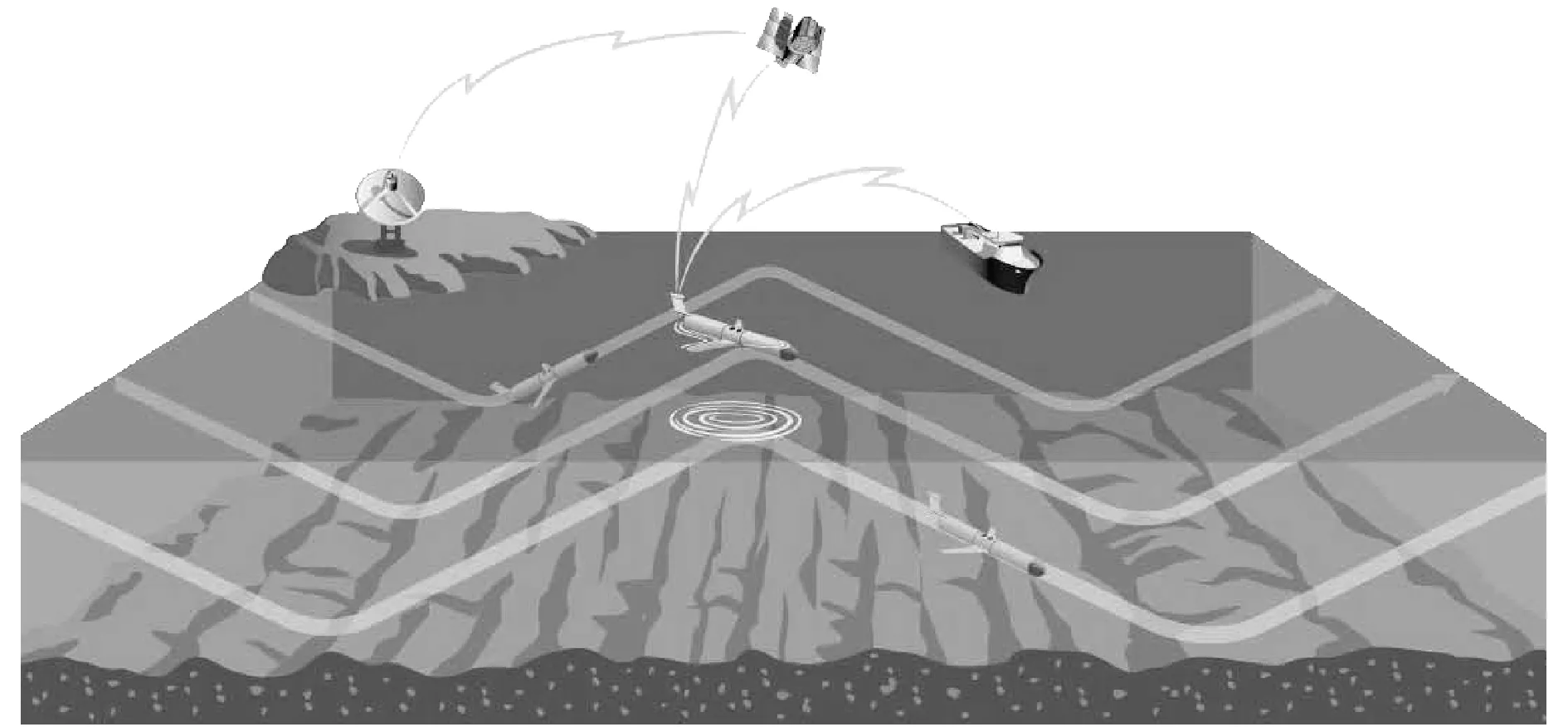
圖 8 水下滑翔機海洋環境探測Fig. 8Marine environment exploration of underwater glider
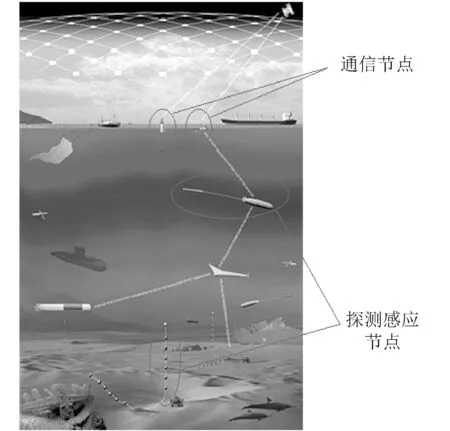
圖 9 近海持續水下監視系統(PLUSnet)Fig. 9The concept of PLUSnet

圖 10 大型航行器察打一體系統Fig. 10Large aircraft inspection and marking integrated system
3 主要技術發展
水下無人航行器按照其主要系統構成與布放使用,可分為航行器總體技術、能源動力技術、控制技術、導航技術、通信技術、任務載荷技術與保障技術等7 個技術方向[8]。
1)總體技術
航行器總體結構以回轉體型為主,非回轉體、仿生等異構體是重要發展方向。2014 年美國研制完成“幽泳者”等多型仿生航行器,通過擺動尾鰭前進,具備高機動航行與隱蔽作戰能力,可為執行情報監視偵察任務提供更好的安全保障;2017 年,英國海軍發布未來概念潛艇及航行器設計,提出“鰻魚”、“飛魚”等多型仿生型航行器概念。結構設計與新材料應用方面,國外大量采用非金屬等輕質材料,美國已采購“刀魚”無人航行器采用鋁合金、多層復合材料和強化玻璃鋼,并采用復合材料螺旋槳,有效降低了自身重量。
2)能源動力技術
航行器目前以可充電鋰電池為主要能源,航速一般不超過5 kn,美國“金槍魚”-21 型航行器3 kn 航速下可持續航行25 h;燃料電池目前國外僅在少數商用或試驗航行器使用,在研新型燃料電池能量密度最高可達725 Wh/kg。油電混合動力是超大型航行器重要選擇方向之一,瑞典、法國、英國和美國均開展了相關研究工作,并實現小型油電混合動力艙的航行器適配研制,美國“航行者”超大型航行器采用油電混合動力,可實現航程6 500 km[9]。推進器以螺旋推進為主,并開始運用泵噴、噴水推進、仿生推進等新型推進形式。新技術探索方面,主要通過建立水下充電站提升航行器持久作業能力。2007 年美國啟動水下母港研究,2018 年完成儲電量200 kWh、工作深度3 000 m 燃料電池水下充電站研制;2017 年俄羅斯提出水下核能充電站技術,計劃建立載有核反應堆的無人充電站網絡。
3)控制技術
水下自主控制技術是無人航行器控制技術發展重點,目前國外已實現預定路徑一定程度的自主判斷,正在開展自主探測定位識別、目標意圖判斷、漁網漁具目標規避等任務能力建設,積極發展面向任務的信息處理與深度學習能力。在美國大型、超大型無人航行器研制中,也將水下自主避障、水面障礙規避與自主決策、漁網規避與自主脫困作為關鍵能力由軍方主導推進。
協同控制以水下有人無人協同與水下無人集群控制為重點方向,在水下有人無人協同方面[10],2016 年美海軍已通過無人機作為通信中繼,實現水下有人平臺對無人航行器的遠程控制,并在2017—2019 年海軍先進技術中重點展示了以衛星為通信中繼的有人無人遠程控制協同作戰構想;在水下無人集群控制方面,2019 年美海軍實現數十艘SwarmDiver 微型航行器集群編隊控制,采用蜂擁算法控制與水面無線電通信模式,實現多航行器任務分配與協同路徑規劃。
4)導航技術
水下無人航行器以組合式導航為主,主流形式為慣性導航系統配合多普勒聲吶計程儀與 GPS 定位系統,輔助導航設備主要包括聲學定位系統、磁羅經等。目前,美國“金槍魚”-21BPAUV 組合導航精度可達到航程的0.1%,超大型無人航行器在無輔助導航情況下組合導航精度為航程的0.15%,國內航行器組合導航精度多為航程的0.3%。此外,2016 年美國國防高級研究計劃局(DARPA)提出水下基站式定位導航概念,通過在海底部署少量的聲源信標,使無人航行器具備水下長航時精確導航的能力[11]。
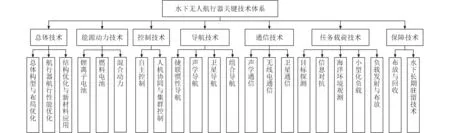
圖 11 水下無人航行器主要技術方向Fig. 11Main technical direction of underwater unmanned vehicle
圖 12 水下基站式定位導航概念Fig. 12The concept of underwater positioning and navigation
5)通信技術
航行器水下通信以水聲通信為主[12],國外航行器先進水聲通信系統 10~20 km 范圍內通信速率達330 bps;水面通信,超短波無線電通信方式通信速率超過10 kbps,微波通信依靠低軌道銥星通信,主要用于航行器與岸上指揮中心、母艇、無人機等的大信息量短時通信,通信速率約115.2 kbps。2018 年美國利用毫米波雷達通過探測水聲信號對水面造成的微小振動,首次實現水下節點直接與空中節點跨介質通信,通信速率達到400 bps[13];2017 年日本在水深700~800 m 完成水下移動物體間藍綠激光通信,通信距離超過100 m,通信速率達20 Mbps,2019 年開發完成水下光通信設備產品,可實現10 m 距離內100 Mbps 的雙向通信[14]。

圖 13 “平移聲學 - 射頻通信”技術試驗Fig. 13Translation Acoustics-Radio Frequency Communication technology test
6)任務載荷技術
航行器任務載荷涉及探測、信息對抗、環境感知、打擊等多個方面。探測載荷國外主流合成孔徑聲吶裝置最大掃海效率為2.88 km2/h,成像分辨率5 cm2,3 kn 航速探測距離260 m。信息對抗國外已完成可模擬潛艇電磁、聲學特征信號的航行器列裝。海洋測量載荷國外水文、水聲、水質、光學類傳感器技術先進齊全,正在開展新型水聲、輻射類傳感器和微納米傳感器研究。小型化武器載荷,美國已研制完成“通用超輕型魚雷”,直徑和重量分別為170 mm,100 kg;負載發射與布放方面,2017 年美海軍已利用直徑0.5 m“金槍魚”-21 中型航行器完成直徑0.12 m“沙鯊”小型航行器、重1.8 kg“黑翼”微型無人機布放,具備無人機、小型航行器等載荷布放能力。此外,2018 年美國DARPA 提出利用海洋生物探測敵方水下目標新型探測技術,通過開發新型傳感器系統,探測并記錄海洋生物對電、聲、磁、化學和光學刺激的行為感知,支持水下無人航行器實現對水下目標的探測。
7)布放回收技術
保障技術主要涉及UUV 布放與回收、水下長期駐留等方面。水下無人航行器的布放與回收可運用水面母船的吊艇架、坡道等實現,超大型航行器可從基地港口布放。此外,美海軍自20 世紀90 年代開始發展潛載無人航行器布放回收技術。2013 年利用直徑1.5 m的“馬林”航行器在潛艇導彈發射筒模擬裝置(直徑2.2 m)進行了73 次布放回收試驗,2015 年美海軍成功完成中型航行器攻擊型核潛艇魚雷管布放回收試驗。水下長期駐留,美國研制完成預置系統可在2 000~6 000 m 深海潛伏5 年并保持作戰能力。
圖 14 潛艇導彈發射筒模擬裝置Fig. 14Simulator of submarine missile launching tube
4 結 語
水下無人航行器不斷向成熟邁進,作戰范圍從淺海到深海,使命任務由輔助作戰走向支持作戰,運用方式由單體走向集群,近中期將為有人高價值目標(航母、潛艇等)構筑外圍警戒/偵察兵力,中遠期將成為海上前出和潛伏攻擊裝備,成為海軍攻防力量的重要組成部分。
1)體系定位將成為水下觸敵作戰主要力量
未來水下無人航行器將逐漸替代部分傳統平臺執行長期重復、持久枯燥、隱蔽危險的任務,甚至擴展延伸原有平臺的某些功能,如替代潛艇和水面艦在關鍵海域進行長時間反潛巡邏,執行抵近偵察、探測、目標指示等任務,并承擔信息中繼、火力打擊等功能,逐漸成為水下觸敵戰斗各環節的主要力量,是信息化戰爭中奪取信息優勢、實施精確打擊、完成特殊作戰任務的重要手段之一。
2)作戰運用強調有人無人協同與無人系統集群作戰
有人無人協同、無人系統集群作戰是未來水下無人航行器作戰運用的重要方向。有人無人協同作戰充分利用有人平臺的信息處理、協同組織和決策能力,無人平臺的隱身性、長續航性、集群性等特點,進一步提升體系的協同態勢感知能力及協同攻擊能力,實現感知探測能力、分析決策能力、協同打擊能力的優化組合與配置,提升體系生存能力。無人集群作戰將形成空中、水面、水下多維度立體式的作戰網絡,擁有傳統平臺所不具備的隱蔽、抗損、可重構等特點,成為打不垮的前沿偵察、監視與打擊力量。
3)系統平臺強調系列化、通用化、標準化發展
水下無人航行器強調平臺系列化、載荷通用化、軟件標準化發展。平臺方面采用系列化建設以支撐水下無人作戰力量快速形成,以美國為例,已建立小型、中型、大型、超大型無人航行器發展序列。載荷方面采用集成化的方式,把專業領域先進技術制成模塊化專用裝置與系統接口,通過載荷模塊配置實現任務能力的轉變,其中美國新一代中小型無人航行器均以商用航行器為基礎平臺研制,通過載荷模塊的轉變實現任務能力的轉變;德國蒂森克虜伯公司提出可轉換水下母艦項目,采用高度模塊化設計,可針對各種任務進行載荷配置。軟件方面利用成熟商用技術,建立開放式標準化無人航行器系統架構,實現其技術快速更新。
4)關鍵技術重點提升網絡化、協同化和集群化能力
多航行器組成一體化偵察、探測、打擊網絡,協同作戰和作業,是提高其作戰能力和作業效率的有效手段,也是水下無人航行器重要發展趨勢,而現階段有限的水下通信能力、低標準的自主控制水平、能量存儲技術限制、單一的布放回收方式等仍是制約水下無人航行器實現作戰能力提升的重要因素[15]。未來可通過聲學、電磁、光學等多種通信方式,增強水下與跨域信息傳輸能力;可采用多種探測識別方式相結合的模式完善環境感知和目標識別能力,以更加智能的信息處理方式進行運動控制與規劃決策,提升無人航行器自主化程度;可通過發展高密度能量源、采用高精度航行器為其他航行器提供導航信息的方式提升水下長航時遠距離抵近作戰能力;探索以大型航行器部署小型無人系統和研究不回收自毀性無人系統概念提升布放回收效能,以實現無人系統作戰能力的突破。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(2018年6期)2018-08-16 07:23:10
新高考(英語進階)(2018年1期)2018-04-18 14:00:11
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
