高機動水下仿生航行器研究現狀
2021-01-19 08:10:32喻俊志杜晟吳正興
艦船科學技術 2020年12期
關鍵詞:設計
喻俊志,杜晟,吳正興
(1. 北京大學工學院,北京 100871;2. 中國科學院自動化研究所 復雜系統管理與控制國家重點實驗室,北京 100190)
0 引 言
自主水下航行器(Autonomous Underwater Vehicle,AUV)是海洋科技中的重要組成部分,在軍事、民事上均有廣泛應用。傳統AUV 采用螺旋槳進行推進,具有安裝方便、控制簡單,易于更換維護等優點。但其效率低、噪聲大、轉向機動性差以及易出故障等實際問題也不容忽視。與此同時,水下生物經過數億年的演化,進化出各種適應于水中運動的能力。通過模仿自然界水下生物的推進機理,能有效提高水下航行器的效率和機動性,以及減少噪聲和對海洋生物造成傷害等問題。
最常見的水下生物是魚類,人類已知的約有2 萬余種。魚類和鯨豚類具有流線型外形,且體表能分泌粘液,能極大降低水中阻力;強有力的肌肉帶給魚類瞬間啟動、爆發式加速和快速轉向的能力,而魚鰾和鰭面的巧妙配合,能讓魚類實現大角度的俯仰運動以及懸停。此外,烏賊、章魚以及扇貝等其他水生生物利用射流實現推進和轉向,在自身加速前進的同時可阻礙捕食者。這些特性給水下航行器的改進和研發提供了新的研究方向和思路。
1 水下仿生航行器的分類
從推進力的來源來分[1-2],可以將水下仿生航行器分成兩大類:一類仿照章魚和扇貝等利用向后方噴出液體進行推進;一類模仿魚類和鯨豚類,利用身體和鰭面運動時產生的渦流進行推進。其中魚類按其推進主動力的來源可分為奇鰭/對鰭(Medial and Paired Fin,MPF)模式和身體/尾鰭(Body and Caudal Fin,BCF)模式。其中,鯨豚類的游動方式也歸屬于BCF模式。而進一步細分,BCF 模式因其身體段參與生成推進力的比例,又可分為鰻鱺式(Anguilliform)、亞鲹科模式(Subcarangiform)、鲹科模式(Carangiform)和鮪行模式(Thunniform)4 種。需要注意的是,這里的分類只針對于魚類的游動模式,而非魚類本身。同類魚可能既能利用BCF 模式實現高速推進,又能利用MPF 模式實現機動轉向和保持穩定。
烏賊、水母等動物可利用身體的特殊構造,儲存水然后向后噴出,獲得前進動力;扇貝通過拍動甲殼,可使水流從前方流入,后方小孔噴出,獲得動力。對于生物體而言,每次運動后都需要一定時間進行恢復,運動效率不高。相比較而言,魚類利用身體變形時產生的渦流進行推進,其運動效率較高,有效功率可達95%以上。以蝠鲼為代表的MPF 模式,其運動平穩,轉向靈活;而以金槍魚為代表的BCF 模式,兼具了爆發性加速和長時間遠距離巡游的優點[3-4]。
2 高機動水下仿生航行器平臺介紹
用飛機機動性類似的概念可以定義水下仿生航行器的機動性,即水下仿生航行器的加速性能、轉向速度以及上浮下潛的速度。考慮到水下航行器在水中運動時所受阻力要遠大于空氣阻力,阻力大小與水中運動的速度平方成反比關系,因此在一定程度上水下航行器所能達到的最大速度也可替代加速度,作為機動性的考察指標。此外,對于水下仿生航行器而言,其最大優勢在于轉向靈活,亦即轉向半徑較小。而從實際角度出發,轉向速度較快的航行器通常轉向半徑較小。因此在衡量水下航行器的機動性時,轉向半徑也可作為一個評價指標。
因水下仿生航行器的大小尺寸不一,采用絕對值進行評估有失偏頗。通常的做法是以體長/秒(Body length/second,BL/s)作為速度的衡量單位,而轉向半徑以單位體長作為衡量單位。下面以速度、轉向半徑和轉向速度等指標為主線,介紹近些年來具有較高機動性的水下仿生航行器平臺。
2.1 噴射式水下仿生航行器
對生物體而言,噴射式的推進往往需要特殊的身體結構實現,每次推進的間隔時間較長。而對機械仿生來說,噴射式的推進可采用簡單機構實現。Wang等[5]設計了一種利用射流進行推進的仿生扇貝,如圖1所示。模仿扇貝的簾狀肌肉,設計了可被動彎曲的人工簾狀肌肉,以起到單向閥的作用。仿生扇貝的外殼張開時,水流入貝殼內部;外殼閉攏時,人工簾狀肌肉保證水流從后方小孔射出,推動仿生扇貝前進。

圖 1 仿生扇貝結構圖Fig. 1Structure of the scallop robot
仿生扇貝外殼的開閉由電機帶動旋轉臂實現。外殼由彈簧連接,當旋轉臂垂直于中心面時,外殼張開;而旋轉臂平行于中心面時,外殼在彈簧作用下閉合。電機轉動一圈外殼開閉2 次。通過調整開合頻率、幅度以及不同尺寸的外殼和射流孔等關鍵因素,仿生扇貝可實現原地轉向,翻滾等動作。最終通過優化參數組合,仿生扇貝的半徑約為0.15 m,最高平均速度為3.4 BL/s,最大瞬時速度為4.65 BL/s。
Wang 等[6]設計了一種利用記憶合金(Shape Memory Alloy,SMA)驅動的仿烏賊水下航行器,可通過鰭面波動和噴嘴向后噴水的方式進行前進,結構如圖2 所示。利用射流推進的最大瞬間速度為0.6 m,但難以實現連續推進。
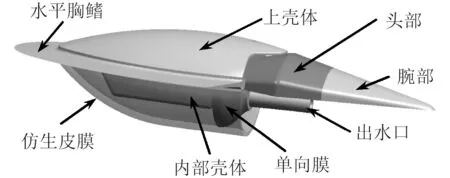
圖 2 仿生烏賊結構圖Fig. 2Structure of the cuttlefish robot
Liao 等[7]設計了一種雙尾鰭的機器魚,如圖3 所示。通過改變2 個尾鰭之間的距離,可使得尾鰭擺動產生的渦流之間相互影響,將其轉變成射流,以此來推進機器魚。當2 個尾鰭反向擺動時,可有效減少魚體的晃動,降低前進阻力。報道的最高游速為0.35 m/s(折合2.5 BL/s)。
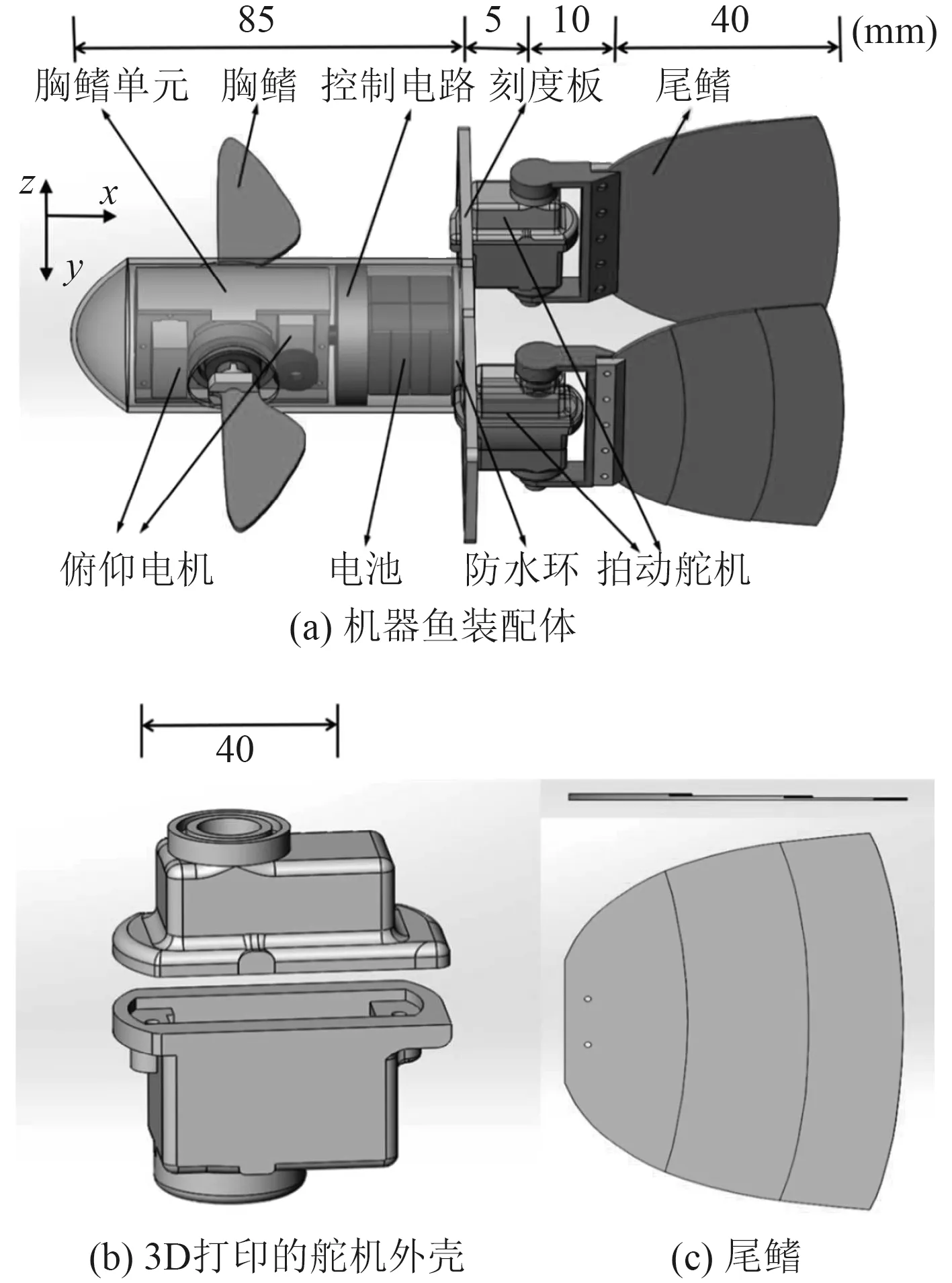
圖 3 雙尾鰭機器魚Fig. 3Schematic of the dual caudal-fin robotic fish
2.2 擺動式/波動式水下仿生航行器
仿效魚類和鯨豚類推進方式設計的水下仿生航行器較多,其研究方向和設計理念不盡相同。部分平臺是為研究魚類游動機理而設計,如MIT 的Robotuna,主要目的是研究尾鰭擺動時流場的變化情況[8],采用魚體固定在支架上的方式進行研究。部分平臺是為研究新的傳感器而設計,如Zheng 等設計的仿箱鲀魚系統[9],主要側重于側線的應用。本文列舉部分具有較高機動性能的代表性水下仿生航行器平臺。
2.2.1 MPF 模式推進平臺
Chew 等[10]以蝠鲼為原型,設計制造了一種仿生蝠鲼(見圖4),體長0.28 m,實現了0.45 m/s(折合1.783 BL/s)的最大瞬時直游速度。
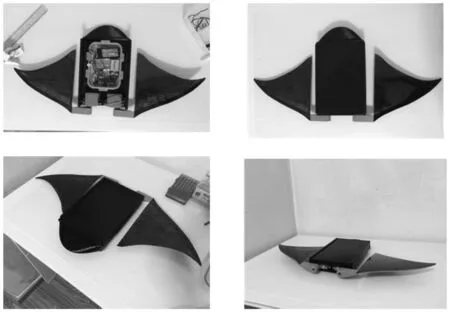
圖 4 仿生蝠鲼原型樣機Fig. 4Photographs of robot manta ray prototype
如圖5 所示,Gao 等[11]設計的蝠鲼體長0.5 m,翼展0.6 m,重量約為3.4 kg。胸鰭設計為一個自由度,由17 W 的直流電機驅動,實現了0.7 m/s(折合1.4 BL/s)的最大直游速度。
2.2.2 BCF 模式推進平臺
從20 世紀90 年代開始研制水下仿生航行器樣機以來,BCF 模式推進就受到廣泛關注。BCF 模式推進的特點在于結構相對簡單,容易實現,且通過設計其機械結構,能實現遠超其他推進模式的性能指標。其動力來源也十分廣泛,可采用氣動、液壓、人工肌肉等方式進行驅動。然而就目前研究成果而言,以電機作為動力來源仍是首選。
1)鰻鱺式推進
Stefanini 等[12]以七鰓鰻為原型,開發了一種長0.99 m,具有21 kn 的仿生鰻魚,以一種仿肌肉的電磁驅動來改變關節角,如圖6 所示。通過中樞模式發生器(Central Pattern Generator Networks,CPGs)對關節角進行控制,最終實現了0.7 BL/s 的最高游速。而得益于多節結構的設計,仿生鰻魚的轉向半徑最小可至0.075 m(折合0.076 BL)。

圖 5 仿生蝠鲼原型樣機Fig. 5Prototype of robotic manta ray

圖 6 LAMPETRA 機器魚示意圖Fig. 6Schematic of LAMPETRA robot
2)亞鲹科式推進
Zhong 等[13]構造了一種線牽驅動的機器魚(見圖7)。其后半部分身體由多個轉動關節連接,且具有一定柔性和彈性,當內置于頭部殼體的舵機帶動穿過各身體段的鋼絲繩運動時,其尾部也隨之擺動。通過舵機旋轉的角度和頻率可控制機器魚的游動姿態。機器魚總體尺寸為0.31 m×0.16 m×0.075 m,重0.5 kg,最終實現了0.665 m/s(折合2.15 BL/s)的最大直游速度和63°/s 的轉向速度。

圖 7 線牽驅動機器魚示意圖Fig. 7Schematic of wire-driven robotic fish
3)鲹科式推進
Clapham 和Hu 通過巧妙設計iSplash-II 的結構[14],實現了鲹科式推進直游速度方面的突破。如圖8 所示,iSplash-II 共有4 個關節,前3 個關節的關節角度由電機所決定,第4 個關節為被動關節。總體尺寸為0.32 m×0.048 m×0.112 m,總重0.835 kg。通過一個峰值功率為120 W 的電機以20 Hz 驅動尾鰭,最終實現了3.7 m/s(折合11.6 BL/s)的直游速度。然而由于結構設計的限制,iSplash-II 并不能實現轉向。
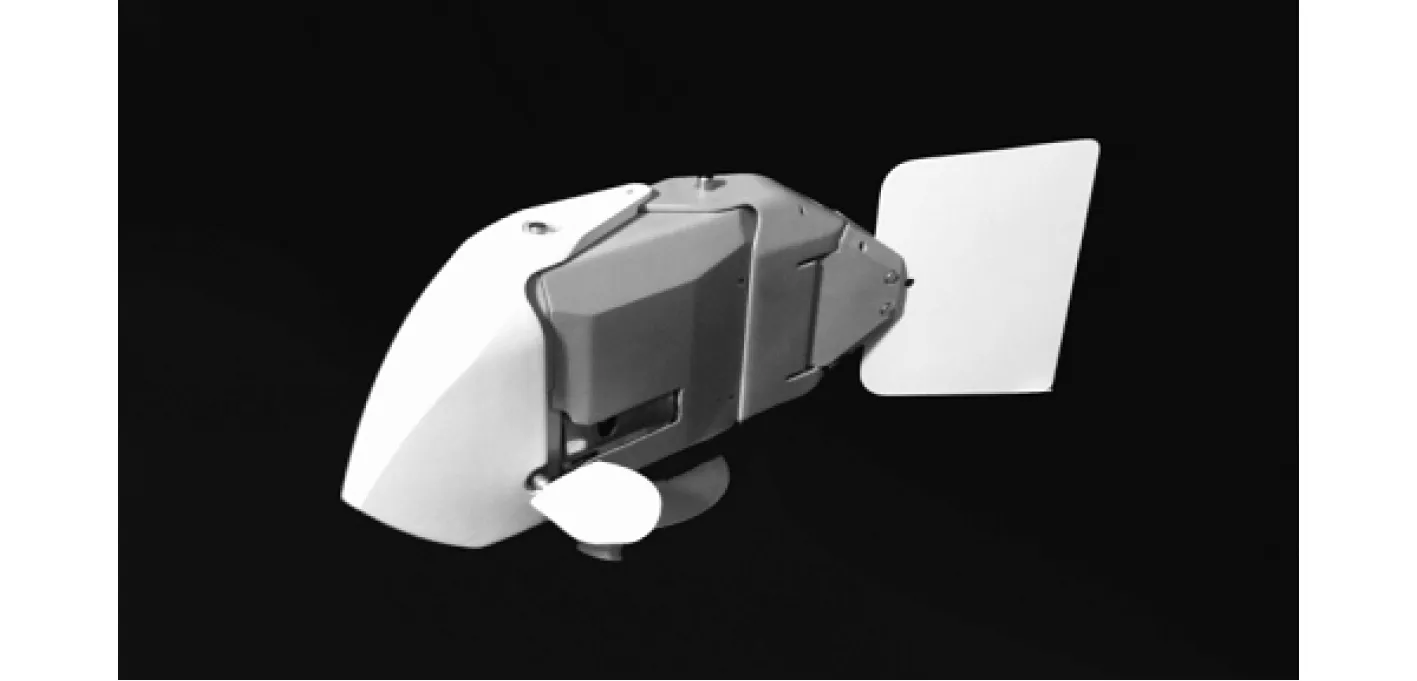
圖 8 iSplash-II 示意圖Fig. 8Schematic of iSplash-II
Su 等[15]為了測試提出的動態軌跡法控制下的C 形轉向所使用的2 種四關節機器魚,如圖9 所示。大型機器魚的尺寸為0.586 m×0.08 m×0.15 m,重3.24 kg,而小型機器魚的尺寸為0.495 m×0.05 m×0.08 m,重1.29 kg。實驗結果表明,大型機器魚的峰值轉向速度為200°/s,平均最大轉向速度為128°/s。小型機器魚的峰值轉向速度為670°/s,平均轉向速度為213°/s。2 種機器魚的轉向半徑均在0.3 BL 之內。
4)鮪行式推進
Zhu 等[16]以黃鰭金槍魚為原型,設計了一種單電機驅動的仿生機器魚Tunabot,如圖10 所示。Tunabot 的尺寸為0.255 3 m×0.049 2 m×0.067 8 m,重0.306 kg。實驗結果表明,在電機轉速達到最高值15 Hz 時,Tunabot 可在超過1.1 m/s(折合4.0 BL/s)的來流中保持位置不變。由于Tunabot 的體型限制,其僅具有直游能力,而不能實現主動轉向和俯仰運動。
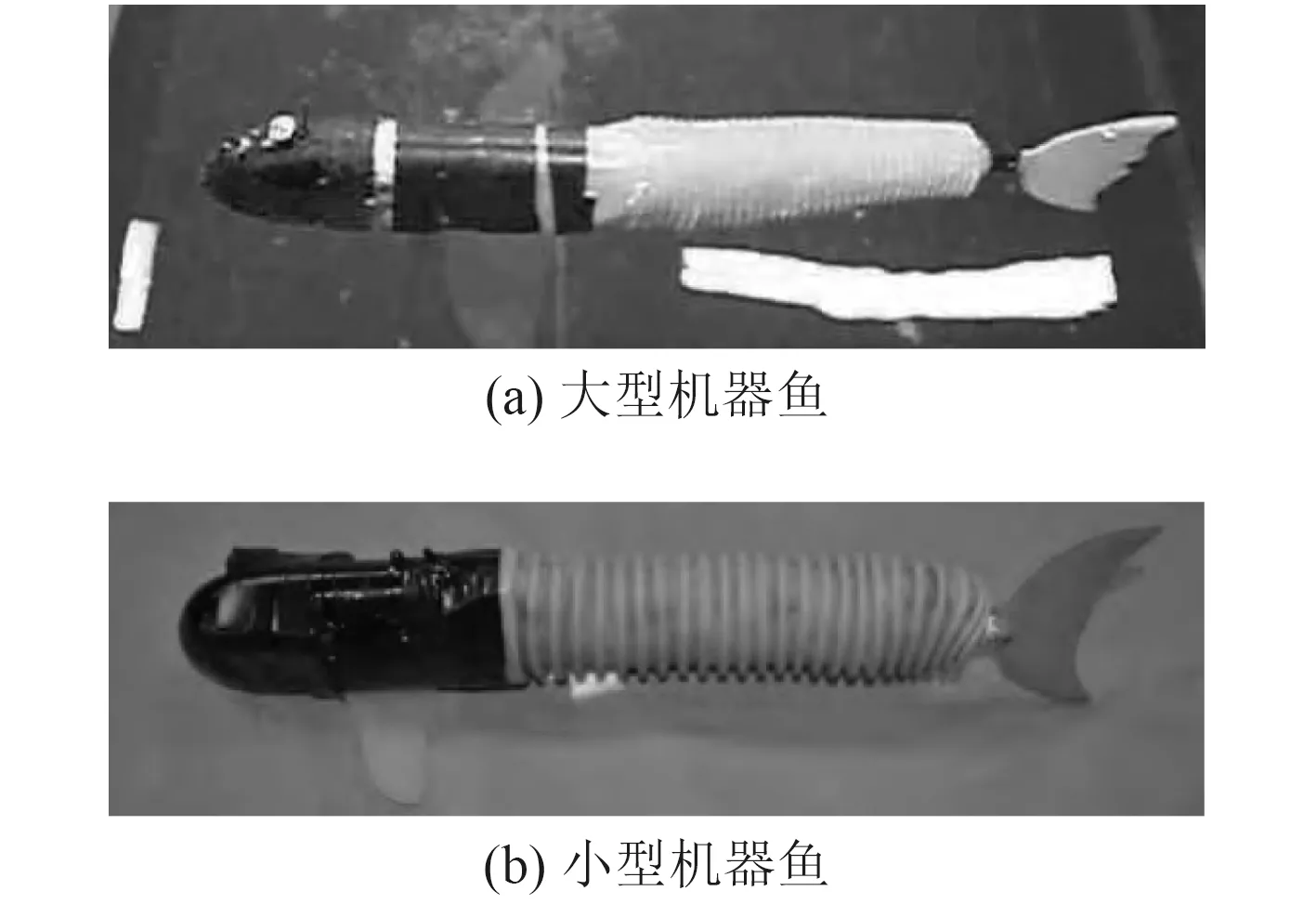
圖 9 用于C 形轉向的2 種四關節機器魚Fig. 9Two four-joint robotic prototypes applied to C-start experiments
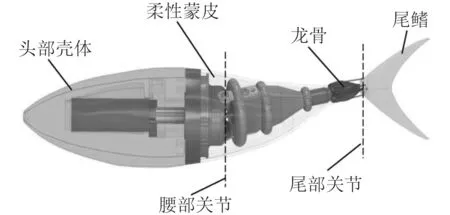
圖 10 Tunabot 示意圖Fig. 10Schematic of Tunabot
Du 等[17-18]為解決水下仿生平臺的直游速度和轉向性能之間存在矛盾的問題,提出一種新型的兩關節驅動方法并應用于仿生金槍魚之上。實驗結果表明,設計的結構能使速度和轉向性能達到一個較好的平衡點。如圖11 所示,仿生金槍魚平臺的尺寸為0.46 m×0.1 m×0.13 m,重1.8 kg,最大瞬時速度為0.76 m/s(折合1.65 BL/s),最小轉向半徑為0.35 BL。
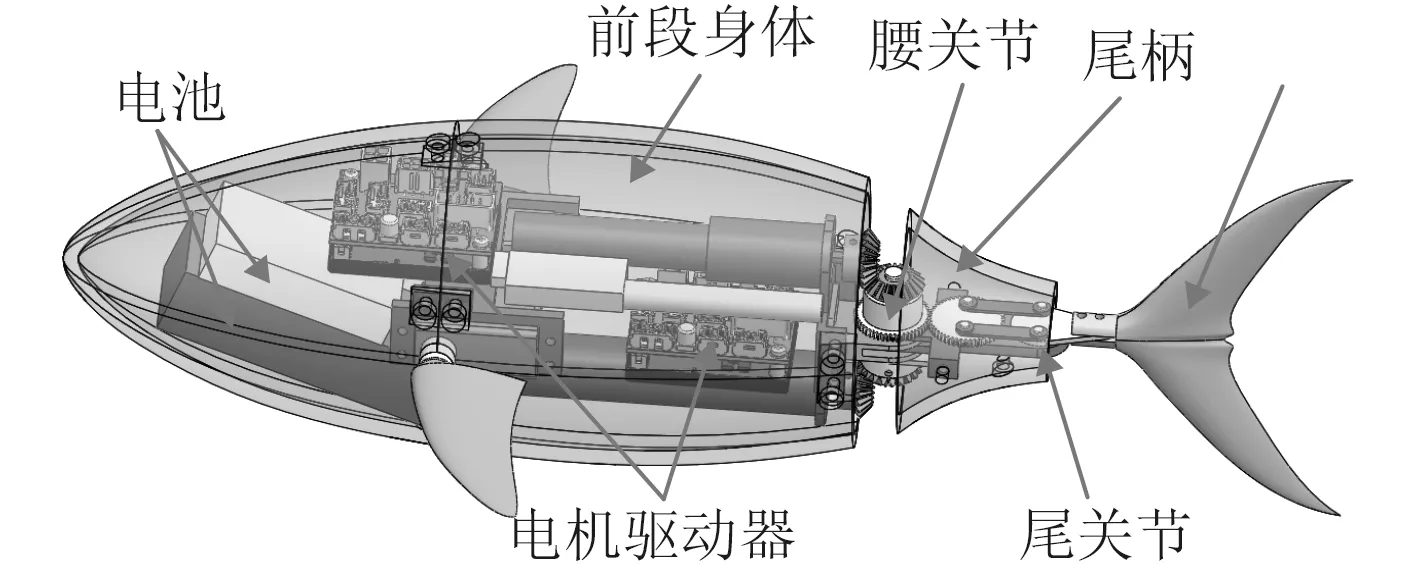
圖 11 仿生金槍魚示意圖Fig. 11Schematic of Tuna-like robot
Yu 等[19]設計了一種高機動型的海豚用于重復躍水的運動控制研究,如圖12 所示。躍水海豚的尺寸為0.72 m×0.12 m×0.13 m,重4.7 kg,最高平均速度為1.93±0.05 m/s(折合2.68±0.06 BL/s),最大瞬時速度為2.11 m/s(折合2.93 BL/s)。
3 分析與討論
如表1 所示,通過上述研究成果的對比可以看出,BCF 模式推進的水下仿生航行器通過優化設計其機械結構和控制算法,可實現遠超其他平臺的性能指標。如Su 等[15]設計的四關節機器魚,能實現670°/s 的轉向速度,雖然較之生物界中射水魚的峰值轉向速度高達4 500°/s 相差甚遠[20],但此項記錄在水下航行器的相關研究中尚屬首次。如最快的iSplash-II 最快游速可達3.7 m/s(折合11.6 BL/s),甚至超過了一般魚類爆發時(約10 BL/s)的速度[14]。但BCF 模式最大問題在于速度和轉向能力難以兼得[18]。一般而言,單電機驅動的航行器往往能在速度方面有較好的表現,而在轉向性能方面有所不足;而多電機驅動的航行器往往在轉向性能方面比較突出,對應的則是速度方面表現較弱。
相對于BCF 模式,采用噴射模式的仿扇貝型航行器能同時在速度和轉向性能上均有較佳的表現。然而仿扇貝型航行器也存在一些問題,例如難以實現俯仰運動,且在野外環境中可能會吸進雜物導致出水口阻塞從而擱淺等。
MPF 推進模式一般具有較強的俯仰能力和轉向能力,且直游運動穩定性較好,適于搭載載荷或作業工具以完成水下作業。此外,MPF 推進模式還可跟重心調整的機構配合,切換成滑翔模式,以實現超長距離的運動。
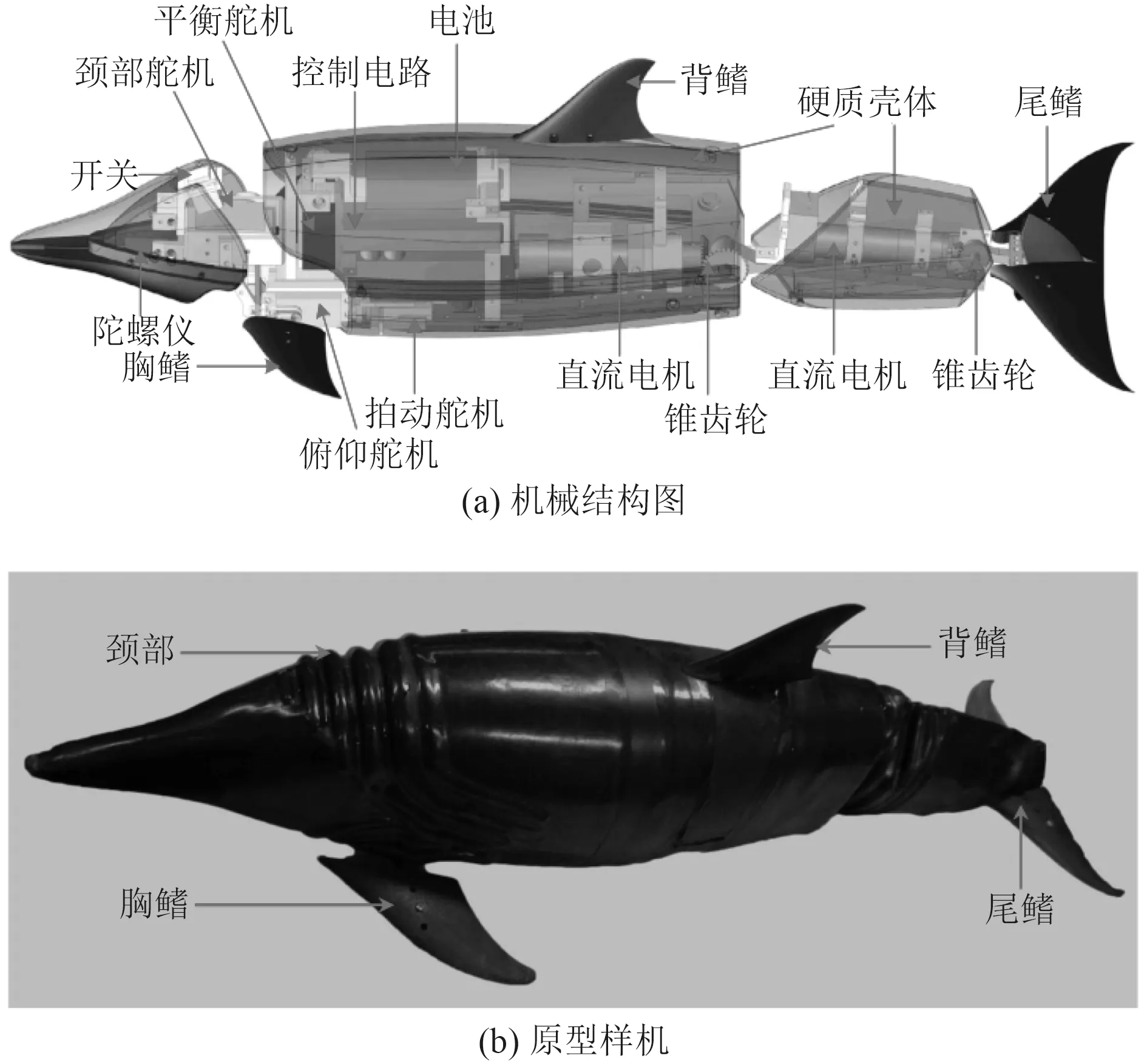
圖 12 躍水海豚Fig. 12Leaping robotic fish
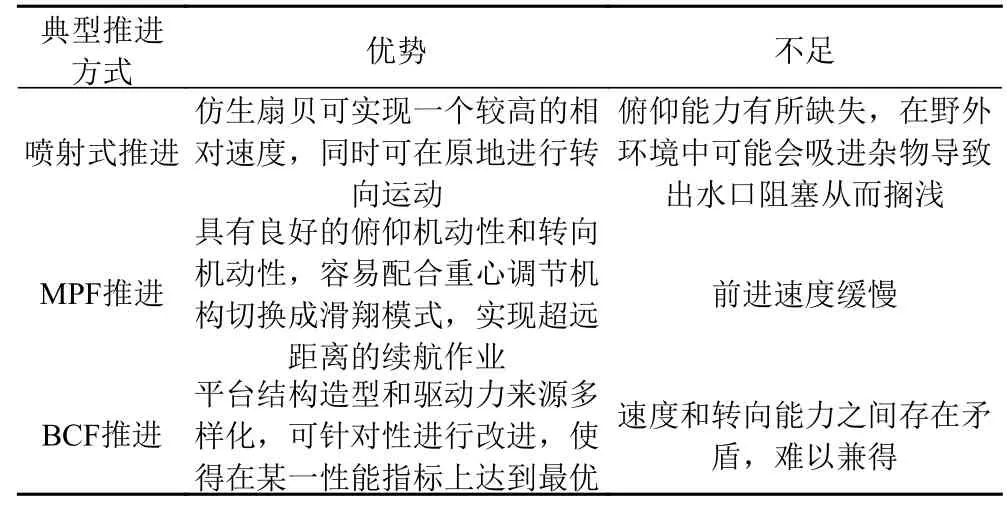
表 1 不同推進方式平臺性能特點對比Tab. 1Comparison of typical parameters of caudal fin-like propulsion AUV
4 結 語
本文以水生生物的推進模式為主線,對水下仿生航行器的研究成果進行分類匯總。以高機動的性能指標為標準,篩選出各個推進模式中具有代表性的水下仿生航行器平臺。通過對比分析可以得知,各種推進方式均有其各自的優缺點,在實際應用中要注意因地制宜、按需搭配。
在軍事領域,可考慮用MPF 模式設計海上瞭望平臺,一方面可通過切換成滑翔模式進行超長距離的布防,另一方面也可在必要時候利用MPF 模式突出的俯仰運動能力潛入水底,以避開可能受到的打擊。而BCF 模式提供了多樣化進攻和偵察的手段。如可設計仿蛇型水下航行器,通過狹窄區域以實現秘密探查,或搭載自爆系統實現定點爆破;可設計以假亂真的航行器混入魚群中進行實地偵察;BCF 推進的快速型水下航行器的研究成果,更可直接移植于魚雷之上,用于提高魚雷的速度,實現精準打擊。而噴射模式可作為輔助動力系統,一方面可用于自身的突然提速,以便甩開敵方;另一方面可通過射流干擾敵方隊形,在關鍵時刻起到出其不意的效果。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
