水下滑翔機集群應用現狀與關鍵技術展望
2021-01-19 08:10:34毛柳偉杜度李楊
艦船科學技術 2020年12期
毛柳偉,杜度,李楊
(中國人民解放軍92587 部隊,北京 100161)
0 引 言
水下滑翔機(underwater glider)是一種典型的自治水下航行器,主要采用浮力驅動實現其在海洋中的上升或下潛,其工作原理如圖1 所示。在下潛起始階段,通過浮力驅動單元減小自身排水體積,使重力大于浮力,開始下潛;到達設定深度后,在浮力驅動單元作用下,改變自身排水體積,使其所受浮力大于重力,從而實現下潛到上浮的轉變。在下潛和上浮過程中,借助固定水平翼上的水動力產生水平運動,從而實現在縱平面內鋸齒形滑翔運動。
在滑翔過程中,通過調整內部偏心重物沿滑翔機主軸線前后移動或左右轉動,實現滑翔機自身姿態的控制。水下滑翔機在實際工作過程中,會定期浮出水面,通過固定于尾部的天線進行定位與通信,實現數據傳輸與指令控制。在水下運動過程中,使用內部集成的電子羅盤和壓力傳感器,結合水面衛星定位信息,通過航位推算算法實現在水下的粗定位與導航。水下滑翔機作為小型的移動觀測平臺,具有低能耗、運行成本低等特點,能夠滿足長時序、大范圍的海洋三維觀探測需求,已廣泛應用于海洋現場觀測、科學研究、環境保護、國防安全等領域,在全球海洋觀測與探測系統中發揮著重要作用[1-4]。相比于傳統的走航式和定點潛標式觀測手段,水下滑翔機具有靈活機動、高效和低成本的優點,可擺脫對投放母船的依賴,大幅度降低海洋觀測及水下探測成本。
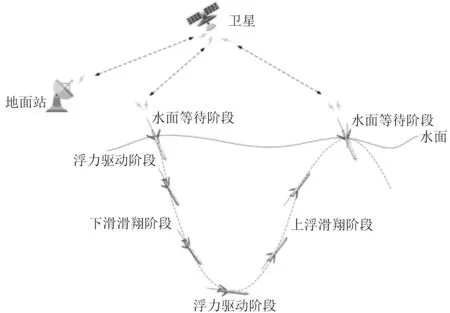
圖 1 水下滑翔機工作原理示意圖Fig. 1Working priciple of underwater glider
1 發展歷程
1.1 國外發展歷程
水下滑翔機設計概念與應用規劃最早由美國海洋學家Henry Stommel 于1989 年提出[5]。1991 年,世界首臺水下滑翔機Slocum 在美國海軍研究辦公室(Office of Naval Research,ONR)的資助下由伍茲霍爾海洋研究所(Woods Hole Oceanographic Institution,WHOI)成功研制,并先后在美國佛羅里達州和紐約州成功完成相關功能驗證試驗[6]。1999 年,美國華盛頓大學應用物理實驗室(Applied Physics Laboratory,APL)研制成功Seaglider 水下滑翔機[7]。同年,美國斯克利普斯研究所(Scripps Institution of Oceanography,SIO)和WHOI 共同研制成功Spray 水下滑翔機[8]。
經過十幾年的發展,3 型水下滑翔機逐漸應用于大中尺度海洋現場調查中,并顯示出在海洋觀測中的巨大潛力,于2002 年首次開始商業化產品銷售應用。在隨后幾年時間內,Slocum,Seaglider,Spray 三型水下滑翔機通過技術轉讓分別通過Teledyne Technologies,Kongsberg Maritime,Bluefin Robotics 公司開始市場化運作,成為當前國際上主流的水下滑翔機產品,并逐漸應用于全球各地的海洋觀探測任務中。
此外,法國ACSA 公司在2009 年研制成功SeaExplorer 水下滑翔機,成為國外除美國外唯一實現商業化運行的水下滑翔機產品[9]。各型水下滑翔機如圖2 所示,主要性能參數如表1 所示。
1.2 我國發展歷程
我國的水下滑翔機研發工作起步于21 世紀初,天津大學研究團隊最早于2002 年開始首型水下滑翔機的探索研制[10],之后在多項科研項目的大力支持下進入高速發展時期。2012 年,天津大學、中科院沈陽自動化研究所、華中科技大學、中國海洋大學共同承擔863 計劃項目“深海滑翔機研制及海上試驗研究”,開展了多型水下滑翔機工程樣機的研制工作,加速推進了深海滑翔機技術工程化。
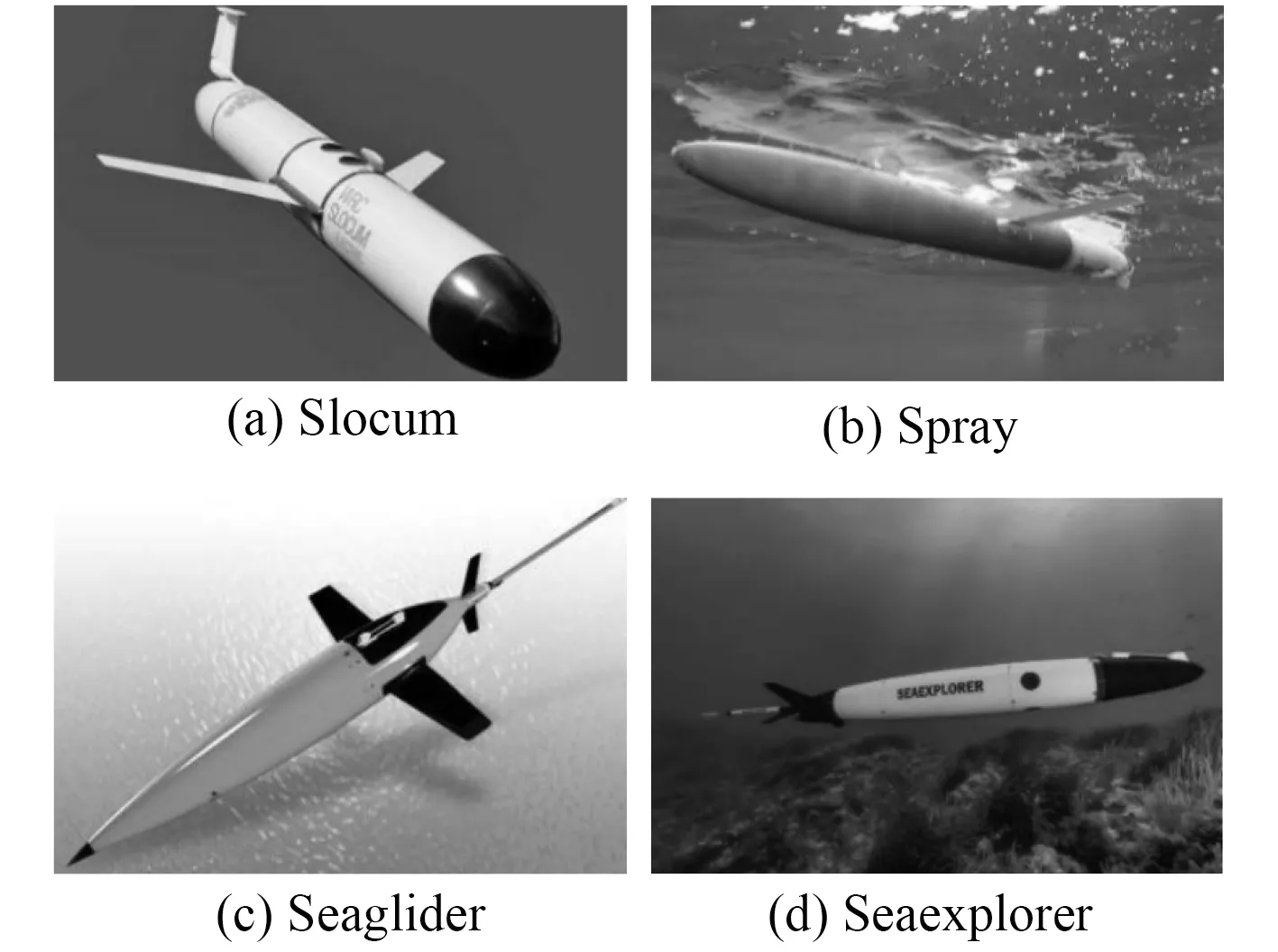
圖 2 國外商業化水下滑翔機產品Fig. 2Foreign commerical underwater glider products
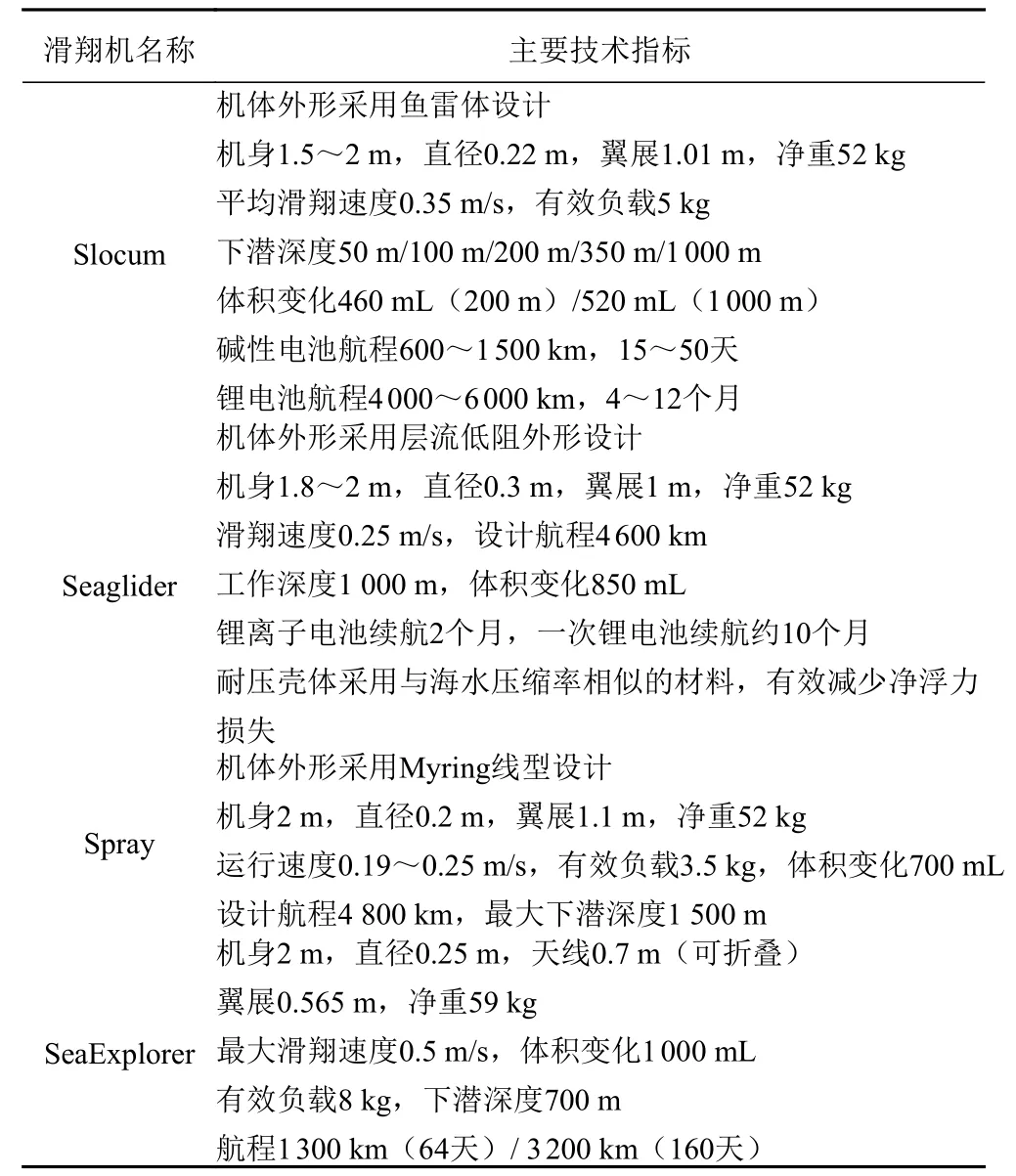
表 1 國外商業化水下滑翔機技術參數Tab. 1Technical parameter of foreign commerical underwater glider products
2015 年,在科技部組織的成果驗收試驗中,14 臺水下滑翔機參加了南海滑翔機性能綜合測試。天津大學“海燕-II”滑翔機連續無故障航行42 天,覆蓋超過1 100 km 的水域,最大下潛深度達到1 500 m,創造了我國滑翔機當時的紀錄[11]。2017 年,中國科學院沈陽自動化研究所“海翼-7 000”深海滑翔機在馬里亞納海溝挑戰者深淵完成了大深度下潛觀測任務并安全回收,其最大下潛深度達到6 329 m,刷新了水下滑翔機最大下潛深度6 003 m 的世界紀錄[11]。2018 年,天津大學“海燕-10 000”萬米級水下滑翔機在馬里亞納海溝附近海域完成一系列觀測任務并安全回收,最大工作深度達到8 213 m,創造了下潛深度最新世界紀錄[11]。
此外,浙江大學、上海交通大學、西北工業大學和華中科技大學等單位也積極開展了水下滑翔機相關研究工作。通過近20 年的努力,我國水下滑翔機單機關鍵技術已較為成熟,我國研制的多型水下滑翔機已經達到工程化和實用化要求。
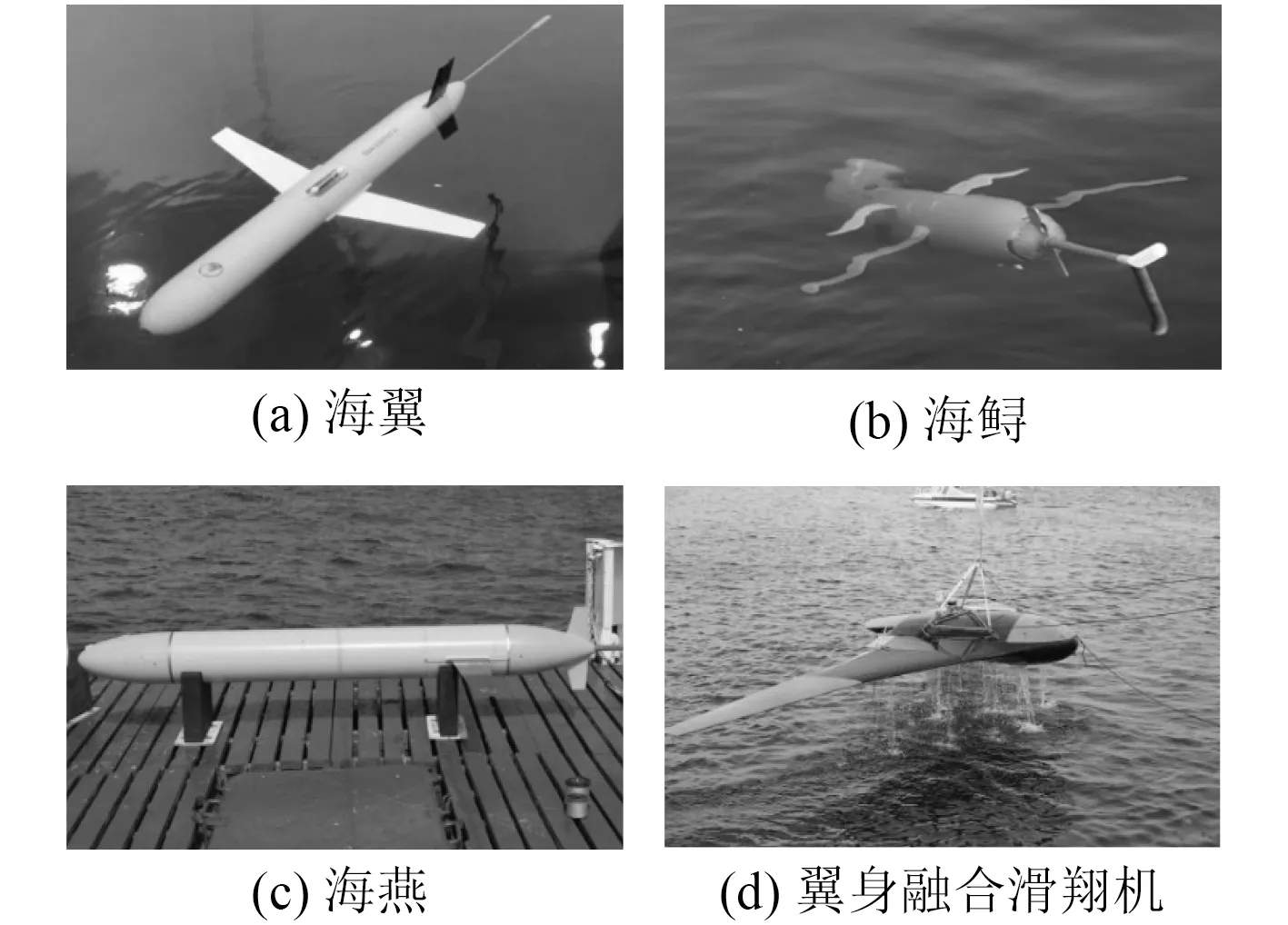
圖 3 我國研制的水下滑翔機產品Fig. 3Uderwater glider products developed in China
2 水下滑翔機集群組網應用現狀
與單臺水下滑翔機相比,多臺滑翔機組成的集群編隊可形成如下優勢:增強水下滑翔機觀探測覆蓋范圍和觀探測能力;實現由點到區域空間的立體觀測;可同時獲取海洋中多點位信息,實現分布式信息感知;通過攜帶不同種類任務載荷,實現多尺度、多任務并行探測;提升了區域覆蓋冗余度,增強組網方案的魯棒性和自適應性。隨著水下滑翔機單機技術發展日益成熟,具有效費比高、易于布放回收、操控便捷、通用性強等優勢特點為水下滑翔機應用范圍逐漸擴大,在各類海洋觀探測網絡的應用愈加廣泛,并逐步應用于集群水下目標探測方面。
2.1 海洋環境觀探測
水下滑翔機集群組網觀測可在同一時刻不同位置對動態海洋現象實現多參數分布式感知和跟蹤,顯著提高海洋觀測的作業效率和應用范圍。目前,水下滑翔機網絡在海洋調查中的應用可分為七大類:邊界流區域持續斷面觀測、沿海和遠洋過渡地帶調查、中尺度和亞中尺度變異調查、淺海和邊緣海調查、與現有的觀測站相關的公海調查、偏遠海區和極端環境調查、危險環境下的調查。國外大型海洋觀測系統中幾乎都出現了水下滑翔機集群編隊的身影[12]。典型組網應用如下:
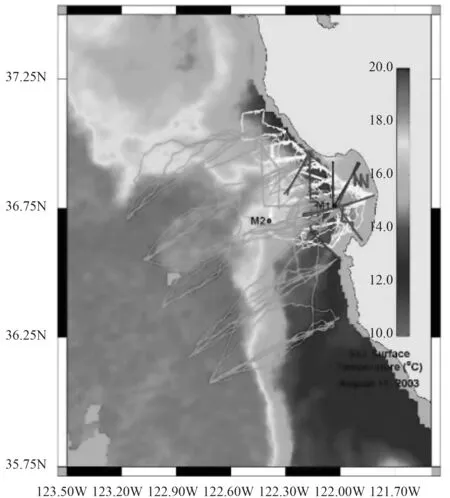
圖 4 ASON 二期試驗中的水下滑翔機軌跡Fig. 4Trajectory of underwater glider in phase Ⅱtest of ASON
1)自主海洋采樣網(Autonomous Ocean Sampling Network,AOSN)
20 世紀90 年代,在美國ONR 的資助下,ASON項目匯集多種海洋觀測平臺(AUV,拖魚,錨系,深海滑翔機,浮標等)在蒙特利灣構建了自適應耦合觀測系統,以提高海洋觀測和預測能力[13]。2000 年8 月,ASON 一期試驗跟蹤了鐵元素引起的浮游植物繁殖期內近岸上升流系統中生物地球化學特性的演變過程[14],驗證了多水下滑翔機實現不同位置同步觀測的技術可行性。2003 年夏季,為觀測蒙特利灣上升流特征,ASON 二期試驗開始實施[15]。其中,5 臺Spray 滑翔機被應用于加利福尼亞洋流系統尺度及模式的觀測中,相應的軌跡如圖4 所示。10 臺Slocum 淺海滑翔機則在Spray 測量參數的基礎上搭載了熒光計、光合有效輻射傳感器,主要觀測冷水羽流及其相關結構。AOSN 二期試驗最具創新性的一點是將3 臺Slocum 滑翔機組成三角隊形,采用該隊形對海洋特征進行自適應采樣,通過3 次編隊試驗驗證了面向滑翔機編隊的自適應控制策略的有效性[16]。
2)綜合海洋觀測系統(Integrated Ocean Observing System,IOOS)
2002 年3 月,美國海洋研討會就組建綜合海洋觀測系統達成共識并向國會提交大會報告。2007 年2 月,NOAA 正式啟動IOOS 項目。IOOS 是國家-區域聯合的全國性項目,致力于更好地獲取海洋信息以提高人類跟蹤、預測、管理和適應海洋環境變化的能力。為提供持續的海洋觀測,2014 年8 月,該項目制定了《U.S. IOOS? National Underwater Glider Network Plan》,指導水下滑翔機網絡的搭建,改進數據管理系統及分發系統,構建更大的綜合性三維海洋、海岸和五大湖觀測系統[17]。此外,IOOS 項目還組建了一個水下滑翔機用戶組(Glider User Group,UG2)以擴大滑翔機的影響和價值。目前,滑翔機網絡在IOOS項目中主要用于生態系統動態監測、MBARI 染料跟蹤試驗、聲學接收器及其他傳感器的性能測試、紅石斑魚及其他魚類存量測繪、墨西哥灣流中滑翔機的速度測試、有害藻華(Harmful Algal Blooms,HABs)測繪、標記魚類聲學監聽、持續有針對性的海洋觀測、美國加勒比海/大西洋經濟專屬區上層海洋監測、圍繞ALOHA 及其他長期觀測站的采樣、水文測繪、海洋酸化采樣、氣候監測等。
2010 年墨西哥灣石油泄漏事件中,聯邦政府、工業界和學術界等多家單位自愿提供多臺滑翔機,觀測事發海域海水溫度、鹽度和速度等參數,以確定石油隨洋流運動的擴散方向(見圖5),顯示了滑翔機網絡相對于其他觀測設備所具有的優越的應急響應能力。
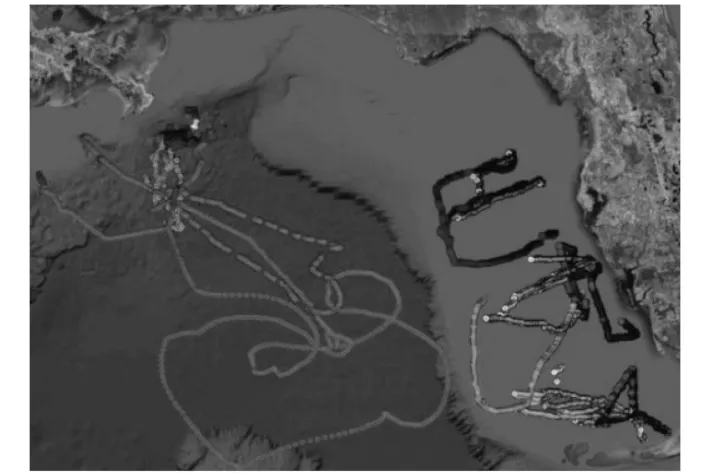
圖 5 2010 年墨西哥灣石油泄漏事件中滑翔機跟蹤路徑Fig. 5Glider tracking path in 2010 Gulf of Mexico oil spill
IOOS 項目在加利福尼亞洋流系統中搭建了加州水下滑翔機網絡(the California Underwater Glider Network,CUGN),開展了相應的觀測任務(見圖6),可持續獲取與氣候變異相關的海洋物理/生物參數,并基于50 m 深度處的溫度生成了一個簡單的氣候變化指數[17]。
2011 年,颶風Irene 和Sandy 襲擊大西洋中部海灣地區,滑翔機被布放到2 個颶風中,收集風暴來臨之前、期間及過后的海洋數據。滑翔機采集到的Irene 溫度數據揭示了颶風引起的海表溫度急速下降現象,此外,由于外部風帶的強風接近,海水冷卻發生在風眼到達之前,滑翔機軌跡如圖7 所示。

圖 6 2006 年以來加州海域水下滑翔機軌跡Fig. 6Trajectory of underwater glider in California waters since 2006
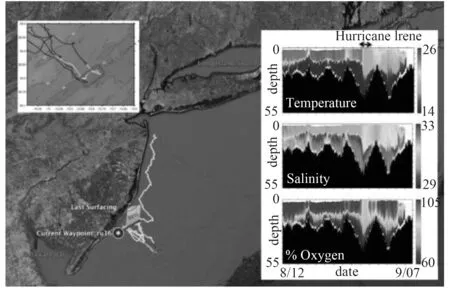
圖 7 2011 年Irene 期間滑翔機跟蹤軌跡Fig. 7Trajectory of underwater glider during Irene in 2011
3)歐洲滑翔機觀測站(European Gliding Observatories,EGO)
2006 年,來自于法國、德國、意大利、挪威、西班牙和英國的海洋學家們發起了組建EGO(Everyone's Gliding Observatories)的倡議,旨在協調滑翔機應用研究,在全球范圍內建立多級合作,實現全球、區域和近岸海域等不同范圍內的長期多參數海洋監測任務[18-19],隨后,澳大利亞、加拿大、南非和美國的海洋學家們也加入其中。迄今為止,共計600 多臺滑翔機成功執行各種海洋觀測任務,完成2 000 000 多個剖面的采集。EGO 觀測中水下滑翔機軌跡,如圖8 所示。
4)澳大利亞綜合海洋觀測系統(Australia's Integrated Marine Observing System,IMOS)
IMOS 始建于2006 年,是由澳大利亞政府支持的國家性合作研究組織。ANFOG(The Australian National Facility for Ocean Gliders)作為IMOS 下轄的一個子系統,負責運行和維護Slocum 和Seaglider 等多臺水下滑翔機組成的機群[12]。其中,Slocum 滑翔機主要被布放在大陸架水域,Seaglider 滑翔機則被投放于較深海域。ANFOG 系統中每臺滑翔機均搭載CTD、三參數光學傳感器和溶解氧傳感器,承擔澳大利亞大陸架和近岸海域的測量任務,對該海域海洋現象,如渦旋內部物理和生物地球化學特性,內潮汐和沉積物再懸浮以及東澳大利亞洋流對陸架動力學影響等方面的研究做出了重大貢獻。迄今為止,ANFOG 系統共布放超過180 臺Slocum 滑翔機和40 臺Seaglider 滑翔機,執行滑翔機觀測任務超過225 次,航行時間超過6 400 天[20]。澳大利亞周圍滑翔機的布放位置和航行軌跡如圖9 所示。
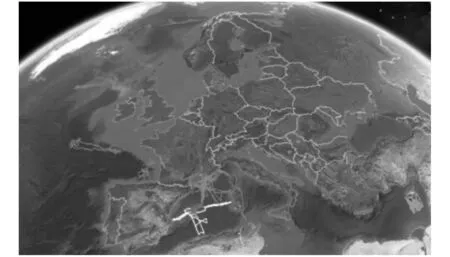
圖 8 EGO 觀測中水下滑翔機軌跡Fig. 8Trajectory of underwater glider by EGO
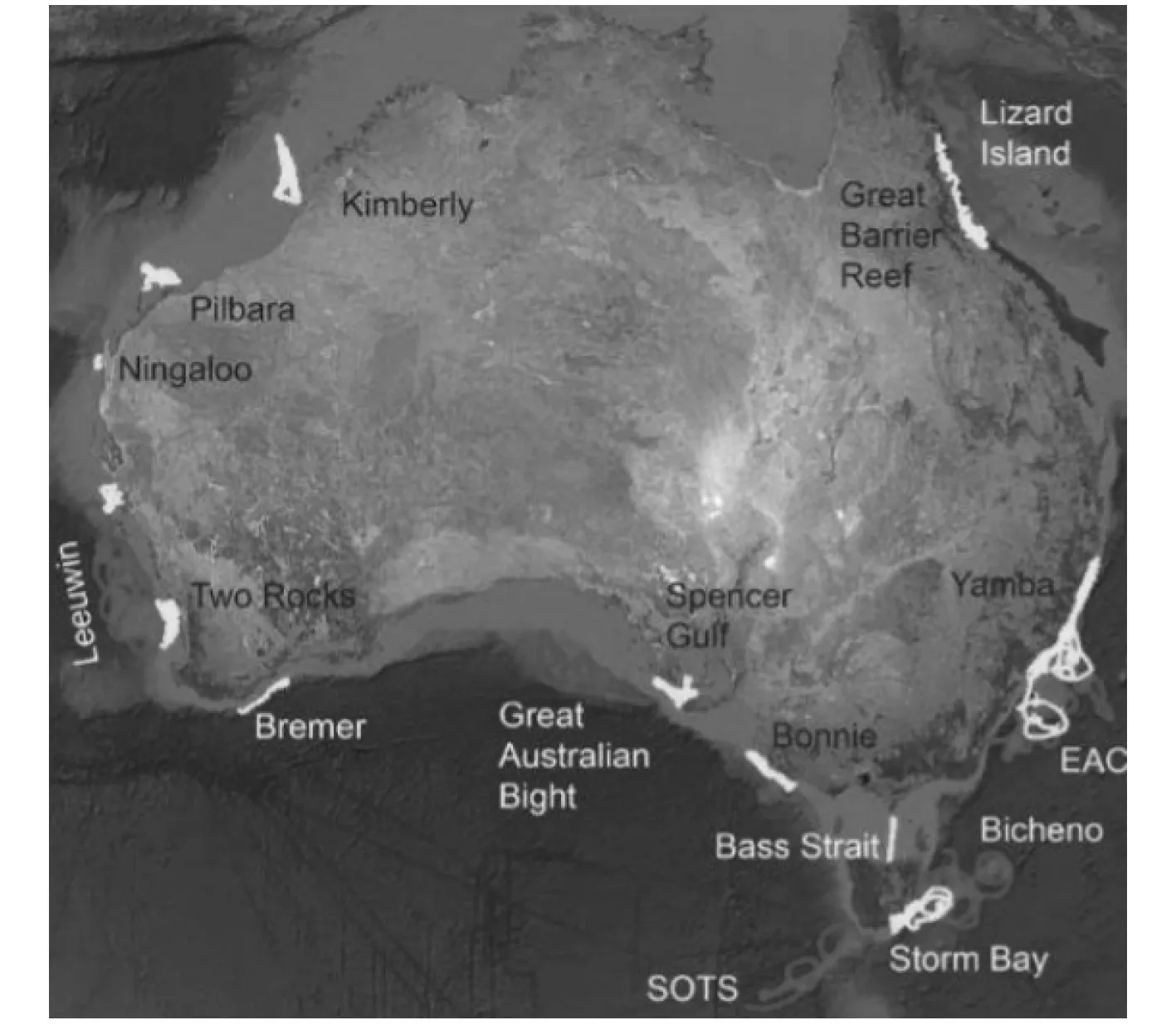
圖 9 澳大利亞周圍滑翔機位置和軌跡Fig. 9Trajectory of underwater glider around Australia
5)我國水下滑翔機集群組網應用現狀
天津大學于2014 年9 月在西沙群島附近開展了水下滑翔機編隊與協同控制試驗,本次觀測任務中,3 臺“海燕-II”滑翔機組成三角形隊形,通過甲板控制軟件同步控制,驗證了滑翔機多層級協調控制策略的有效性[11-12],如圖10 所示。2017 年8 月,天津大學依托青島海洋科學與技術國家實驗室,與中國海洋大學、中船重工第710 研究所、中山大學、復旦大學等高校和研究機構合作,在南海北部海域布放了12 臺“海燕-II”滑翔機[21]、各型波浪滑翔機等共計30 余套國產海洋觀測裝備(見圖11),開展了面向海洋中尺度渦的多參數、綜合、立體、協作、異構組網同步觀測,有效提高了我國海洋觀測的能力和水平。本次試驗中12 臺滑翔機搭載多種傳感器沿網格形軌跡對南海北部反氣旋渦進行了為期26 天的高精度采樣。
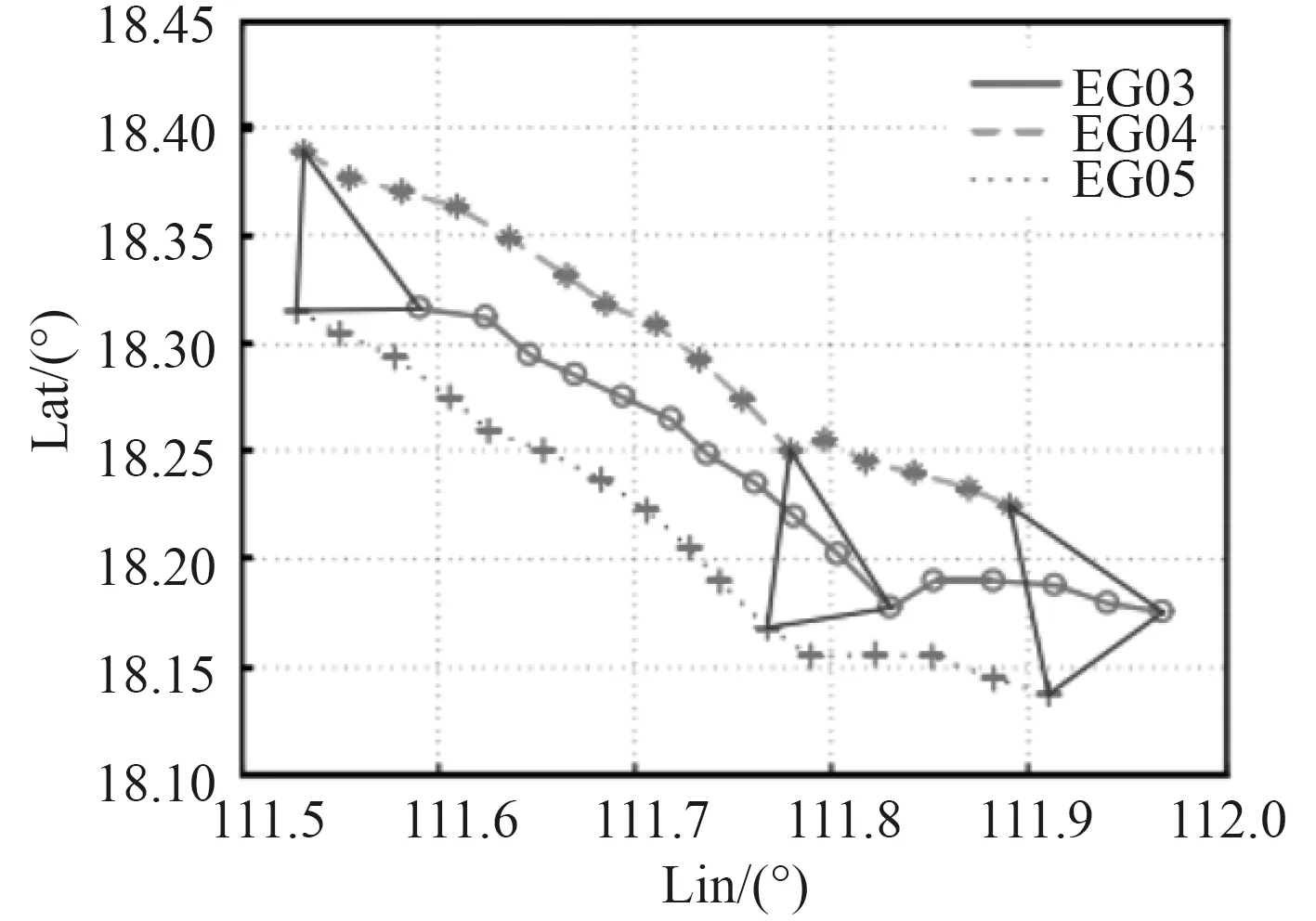
圖 10 2014 年3 臺“海燕-II”滑翔機三角形隊形軌跡Fig. 10Triangle formation trajectory of three Petrel-Ⅱunderwater glider in 2014
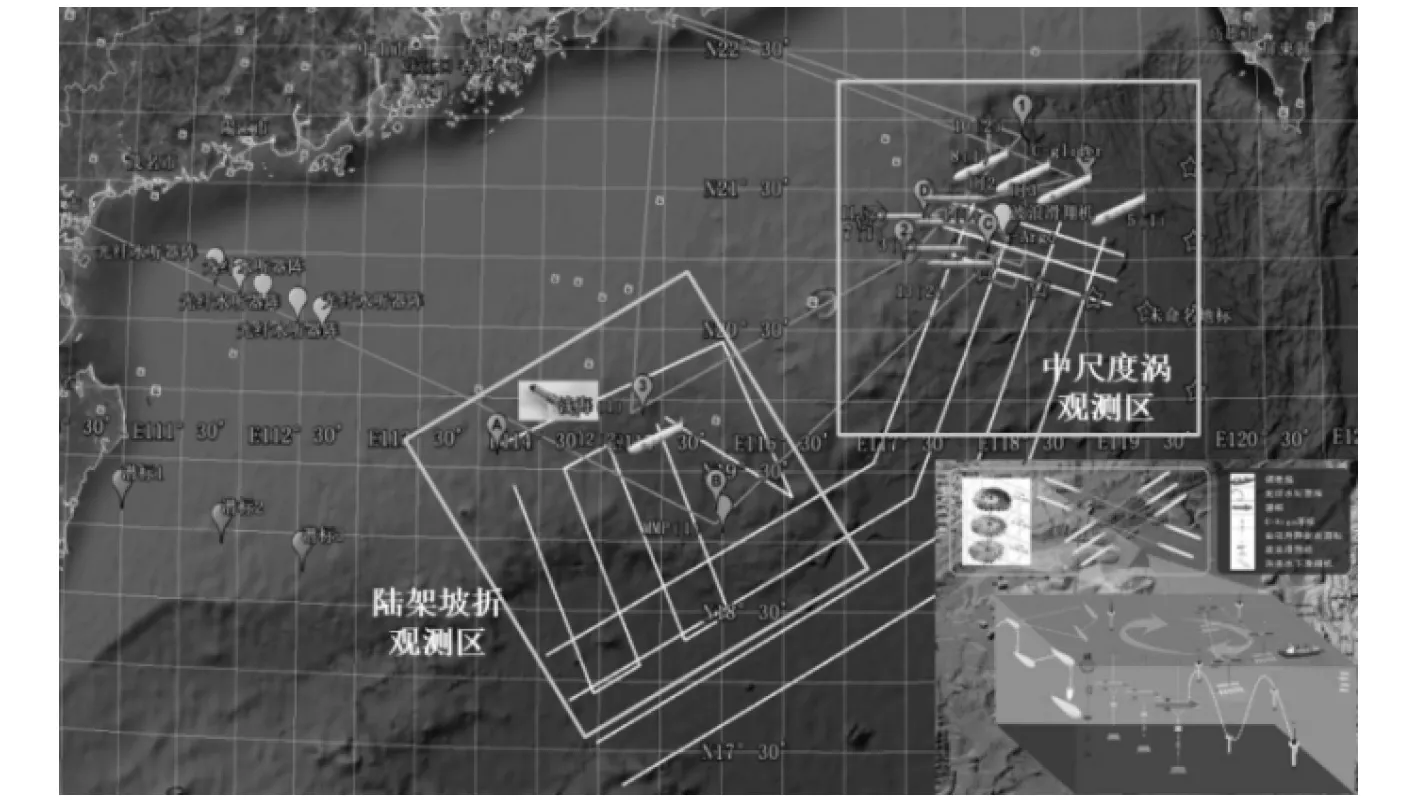
圖 11 2017 年“海燕”水下滑翔機南海北部立體綜合觀測網Fig. 11Petrel-Ⅱ underwater glider three-dimensional comprehensive observation network for northern South China Sea in 2017
2017 年7 月,中國科學院沈陽自動化研究所在南海北部布放了12 臺“海翼”號滑翔機觀測反氣旋渦的三維結構和時間演變過程,如圖12 所示。本次試驗中,滑翔機機群沿網格形軌跡航行,共計采集到3 720 個溫鹽剖面,該數據與同時期62 個拋棄式XCTD 采集到的數據對比,結果顯示兩者均體現了中尺度渦場的特征[22]。
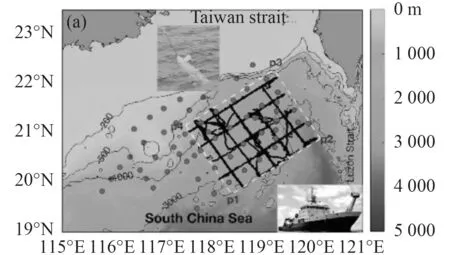
圖 12 2017 年“海翼”水下滑翔機集群軌跡Fig. 12Trajectory of Sea wing underwater glider cluster in 2017
2019 年10 月,在我國第10 次北極考察期間,自然資源部第一海洋研究所實施了我國首次水下滑翔機北極海域組網觀測,采用3 臺“海燕”水下滑翔機搭載溫鹽深和溶解氧傳感器,對北極海域水體與生化要素進行了組網觀測[23]。期間“海燕”完成了臺風過境的全過程觀測,完整記錄了強氣旋過程對海洋環境的影響數據。經過22 天的組網觀測,“海燕”獲取到白令海公海東西方向斷面連續、高密度水文和生化觀測數據。
2020 年初,在自然資源部印度洋聯合海洋與生態研究(JAMES)計劃的相關科考任務中,布放12 臺“海翼”水下滑翔機完成了我國在印度洋多參數水下滑翔機協同組網觀測應用[24]。“海翼”水下滑翔機搭載了多種類型的水文與生物化學傳感器,在300 n mile×300 n mile 觀測海域內執行集群協同觀測,12 臺水下滑翔機累計海上工作550 臺天,航行距離12 000 km,完成了3 400 多個剖面的科學觀測,此次任務為揭示北印度洋海水缺氧、海洋中尺度渦旋動力過程、海洋水文環境變化等方面研究提供了第一手資料。
2.2 集群水下目標探測現狀
水下滑翔機在巡航中利用自身的凈浮力來實現向前滑動、推進,所產生的噪聲低,具有較強的隱蔽性和很好的水聲探測效果。因此,基于水下滑翔機的水聲探測集群,能夠對任務海域的水下目標、海洋環境進行長時間、大范圍的隱蔽偵察、探測和數據收集。國內外單位開展了滑翔機平臺集成聲學載荷并開展水下探測、通信技術的研究,取得了顯著進展。近年來,主要對水下聲學滑翔機集群組網探測技術開展研究。
廣域海網(Seaweb)[25]是一種典型的海底水聲傳感器網絡,將固定節點、移動節點和網關節點通過水聲通信鏈路連接成網。自1998 年起,美國海軍多次進行了Seaweb 水聲通信網絡試驗,旨在推進海軍的作戰能力。近年來,美軍開始嘗試在無人水下滑翔機Slocum平臺上搭載聲學載荷,實施水下目標,水下多節點的信息交互試驗。
PLUSNet[12]是由美國賓夕法尼亞大學研發的一種半自主控制的海底固定和水中機動的網絡化設施。該系統以核潛艇為母節點,核潛艇攜帶的UUV 為移動子節點,潛標、浮標、水聲探測陣為固定子節點,可獲取海洋環境信息,進行水下目標探測。在“蒙特利灣2006”試驗期間進行的4 個項目試驗中,PLUSNet 進行了該項目有史以來規模最大的試驗,10 多艘艦艇、30 多個UUV 以及各種浮標、潛標參加。
在2011—2014 年的歐盟合作項目GROOM(Gliders for Research,Ocean Observation and Management)中[19],評估了極限環境下聲學技術用于滑翔機導航和數據傳輸的可行性,為現有全球海洋觀測系統(Global Ocean Observing System,GOOS)提供了重要的補充信息,填補了當前全球、區域和沿海觀測范圍內海洋觀測系統所留下的空白。
2014 年,在加拿大海洋環境觀測與預測響應網絡中心(Marine Environmental Observation Prediction and Response Network Centre,MEOPAR)的鯨魚習性與聽覺試驗項目(Whale Habitat and Listening Experiment,簡稱WHaLE)資助下,11 臺搭載被動水聽器滑翔機開展了為期2 年的集群組網部署任務,任務中使用水下滑翔機執行區域內鯨魚聲特征記錄與數據分析任務[26]。
2018 年9 月,中國科學院沈陽自動化研究所研制的2 臺“海翼1 000”聲學水下滑翔機完成為期1 個多月的南海聯合觀測與通信試驗。2 臺水下滑翔機對試驗區域的海洋環境參數與聲場信息進行連續精細觀測,同時通過水聲通信機獲取時效潛標的觀測數據,并將數據通過衛星通信發回岸基監控中心。此次海上試驗實施拓展了“海翼”水下滑翔機的探測功能,并驗證了一種移動-固定聯合觀測作業新模式,為解決潛標觀測數據實時化問題提供全新解決途徑[27]。

圖 13 Seaweb 網絡中的水下滑翔機集群示意圖Fig. 13Schematic diagram of underwater glider cluster in network of Seaweb
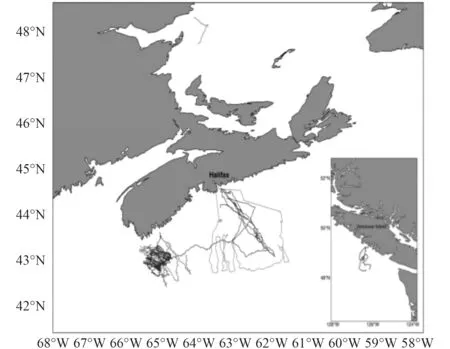
圖 14 滑翔機集群在WHaLE 項目中的航跡圖Fig. 14Trajectory of underwater glider cluster in WHaLE
3 集群探測關鍵技術
近年來,隨著水下滑翔機集群探測觀測技術的提升,行業內正在拓展將其應用于集群水下探測等方面,實現一定范圍內具備對部分聲學目標的探測和警戒能力。然而,鑒于水下環境的特殊性和復雜性,決定了水下聲學滑翔機還面臨著本體干擾、功耗高、通信能力和計算能力相對較弱等技術瓶頸。為充分發揮聲學水下滑翔機集群在集群探測特別是協同組網水下聲學探測體系中的作用,需要重點攻克多項關鍵技術。
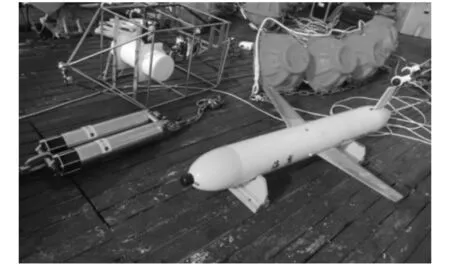
圖 15 “海翼”聲學水下滑翔機Fig. 15Acoustic underwater glider of Sea wing
3.1 平臺集成技術
聲學任務載荷在水下滑翔機平臺中的適配性對發揮探測效能起到重要作用。水下滑翔機作為運動平臺,本體產生各類噪聲,如機械噪聲、電磁噪聲、流噪聲等并對任務載荷產生干擾,影響探測效能與目標解算精度,突破水下滑翔機總體集成控制技術,是研制高性能水下聲學滑翔機平臺的關鍵。
總體集成技術應開展水下滑翔機搭載平臺及聲學任務載荷電磁兼容性設計,降低電磁噪聲干擾;優化水動力外形,水下滑翔機平臺具備層流低阻水動力特性;進行水下滑翔機航行擾動噪聲特性研究,開展平臺高魯棒性動穩定航行控制技術研究,削弱平臺晃動對水下目標探測的影響;基于平臺航行狀態與功能階段,開展平臺總體、功能系統、單元器件三級振動特性、機械噪聲分析,實施結構減振動降噪設計,優選設計平臺共振點位,最大限度地保證水下滑翔機平臺與任務載荷性能的完整性。
3.2 人工智能技術
隨著大數據分析、深度學習與人工智能等技術的發展,人工智能近年來在智能感知、識別、控制領域取得了突破性進展。水下滑翔機向著“智能一代”躍進,人工智能技術將取代當前的邏輯控制器,成為未來水下滑翔機單機平臺與多機集群的操控大腦。
由于海洋應用場景的特殊性,決定了水下滑翔機面臨著嚴峻的功耗、通信能力和計算能力的限制。基于水下滑翔機平臺,發展人工智能技術,可基于海洋環境場信息、聲探測信息及滑翔機本體、集群狀態信息,結合新興發展的人工智能先進理論,實現水下滑翔機對海洋水體環境、敵我勢能場的準實時感知、分析成像,進而增強其完成復雜水下探測任務、集群管控的能力,實現水下滑翔機對突發任務的在位應急處置和集群智能協同。
3.3 能源補給技術
水下滑翔機依靠機體攜載的電池實現運行工作。因攜載電池能量有限,水下滑翔機自持力、續航力受到制約。聲探測載荷及附屬數據處理分析系統將顯著增加水下滑翔機的客棧負載能耗,導致水下滑翔機的部署頻次與成本增加,降低水下聲學滑翔機及集群的使用效能。
能量密度是制約當前電池發展的最大瓶頸。一方面,加強電池制造工藝、材料性能的研究,開發新材料和新化學體系,尋找短期、中期和長期的電池技術解決方案,同時發展小型化燃料電池與平臺集成技術,實現水下滑翔機攜載電池能量密度能夠達到一個全新量級。另一方面,強化水下充電站、水下接駁入塢、水下無線充電等技術研發,并達到實用化水平,實現水下滑翔機在設定區域內值守與在位能量補給。
此外,海洋中蘊藏著巨大能量,海洋通過各種物理過程接收、儲存和散發能量,也為水下滑翔機利用海洋環境能源提供了可能。海洋能包括潮汐能、波浪能、海流能、海洋溫差能等多種形式,推動小型化海洋能俘獲利用技術研究,突破水下滑翔機海洋自供能關鍵技術,可顯著提升水下滑翔機的能量自給水平,增強其續航力、自持力。
3.4 水聲通信技術
水下聲學滑翔機在執行探測任務期間,因作業時間長,收集信息數量大,傳送數據與接收決策指令的需求顯著增加,對通信手段及性能提出了更高要求。目前,水下滑翔機主要采取滑翔上浮至水面,經衛星通信與岸站建立數據交互通道,并基于岸站施集中控制,開展各類數據的匯總、后處理、任務下發及水下滑翔機的調控、航線調配等工作。然而,現有通信方式難以實現水下探測數據的及時報送,且各臺水下滑翔機間無法直接通信,集群難以對水下目標實施長時跟蹤探測。
未來,應開展面向水下移動平臺的水聲通信及水聲組網技術研究,突破水聲中距離高速率、低功耗通信、時變信道條件下的高速水聲通信編解碼、時變信道下水聲組網與路由及移動節點動態接入、多節點水聲時空同步等關鍵技術,研制可滿足水下滑翔機平臺搭載能力與功耗負載約束的水聲通信機。
4 發展展望
受水下環境的復雜性和水聲探測技術的局限性影響,水下聲學滑翔機單機平臺的探測距離較近,難以形成區域覆蓋能力。因此,通過技術升級和使用方案優化,將水下滑翔機進行梯次配置、組合使用,構建具備互通信能力的水下滑翔機探測集群,可以更好地發揮水下滑翔機在水聲探測體系中的優勢,以彌補單機平臺不足,增強水下滑翔機對水下目標預警探測能力。未來,水下滑翔機探測集群可作為有人、無人系統協同探測網的重要組成部分,打造分布式的水下傳感器節點,形成廣域、持久的水下預警探測體系。
