兼顧水面航態UUV 性能和功能綜合優化設計
2021-01-19 08:10:44程占元楊松林汪保江施妍蔡城岐
艦船科學技術 2020年12期
程占元,楊松林,汪保江,施妍,蔡城岐
(江蘇科技大學 船舶與海洋工程學院,江蘇 鎮江 212003)
0 引 言
伴隨著相關技術的快速發展,水下無人艇(UUV)多被用于布雷排雷、偵察等軍事用途以及勘探資源、沉船打撈、水下電纜鋪設等民事用途[1]。UUV 具備超高的隱蔽能力,有較強的續航力、作戰和突擊能力等諸多優勢,但其自我保護力不強,水下聯絡較困難,不易實現雙向、及時、遠距離的通信,且容易受環境影響,掌握敵方情況比較困難。水面無人艇(USV)可承擔環境監測、監視偵察、遠程打擊、搜捕、水文地理勘察、遠程通信等任務,但USV 在水面作業目標大,容易被發現,防御能力弱,且易較大遭到海面風浪的影響。無論是UUV 還是USV,都有一定的局限性[2-3],因此,為了更好發揮各自的優勢,實現兩者的有效結合,發展一種以水下航行為主、可兼顧水面航態的UUV 已經勢在必行,深入研究該型UUV 的快速性、操縱性和功能性顯得尤為重要。多學科設計優化一般用在比較復雜工程系統和子系統,并且統籌各系統的彼此相關要素[4],因為設計過程中,關系到多個學科范圍,進行UUV 的綜合優化是無人艇設計的主要部分[5]。因此本文基于團隊自編多學科綜合優化軟件,并進行了必要的改進,經過多種優化算法進行計算分析,得出了優良的計算結果,體現了優化軟件的準確性和可靠性,該計算結果為新艇型的開發設計提供了有效的數據支撐和參考依據[6-7]。
1 無人艇優化設計數學模型
1.1 主艇體設計
預計把UUV 的主艇體分成首部、平行中體和尾部型線部分。其設計艇型的首段為半橢圓,尾段是一段圓錐體,可以適當與平行中體流線型過渡,平行中體可以適當增大長度。為能同時起到兼顧水面的效果,可搭載一種可伸縮支柱平臺,在其上部搭載天線、傳感器等一些裝置,更高效的監測水面與水下,如圖1所示。

圖 1 主體和柱體基本型線圖Fig. 1Basic profile of main body and column
在深入研究多種回轉體形狀幾何特征基礎上,阻力性能AUTOSUB 型回轉型深潛器阻力性能相對較佳[8]。本文初步設計主艇體艇型參考AUTOSUB 型,對其進行改進,以更好起到對水面航態的兼顧性目的。
1.2 優化數學模型
1.2.1 設計變量
24 個設計變量:首段 Lh,平行中體段 Lm,尾段La,浮心縱向位置 Xf,螺旋槳直徑 Dp,螺旋槳螺距比PDp,艇體中橫剖面直徑 Dp,螺旋槳盤面比Aeo,上部柱體長度 Lu,上部柱體寬度 Bu,上部柱體高度 Hu,螺旋槳轉速 N,航速 Vs,水平舵的翼端弦長 doh,水平舵的根部弦長 dih, 水平舵的展長 Zh,垂直舵的翼端弦長dov,垂直舵的根部弦長 div,垂直舵的展長 Zv,精度X1、工作溫度 X2、監測溫度 X3、測溫精度 X4、單個價格 X5。
1.2.2 目標函數
1)快速性子目標函數
參考并選擇海軍系數公式:

本文水下無人航行器以水下航行為主,忽略興波阻力的影響,總阻力為:

2)操縱性子目標函數
UUV 的航行可從水平面和垂直面運動兩方面探討,共選擇水平面穩定性橫準數、相對回轉半徑、升速率3 個指標構成操縱性的目標函數,即

根據相關經驗,無因次穩定性橫準數和升速率越大則結果更優,相對回轉半徑越小則結果更優,式中β1β2β3均大于0,且β1·β2·β3=1。
其中水平面穩定性橫準數
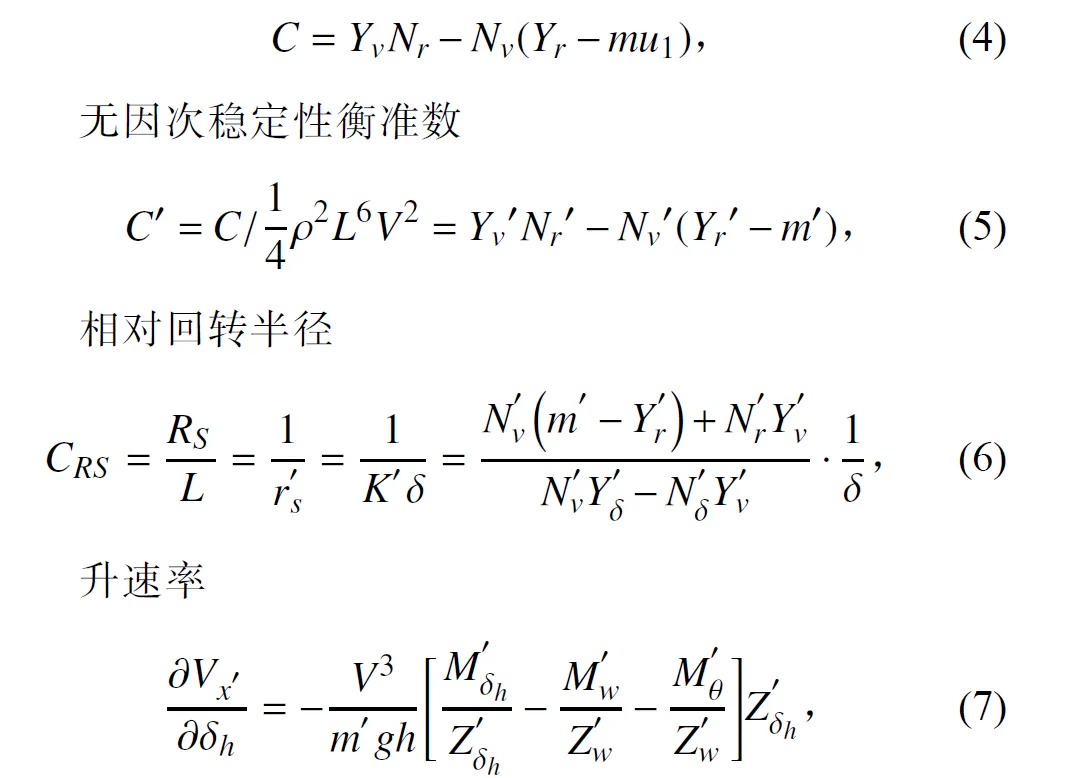
其中潛伏角為:

3)功能性子目標函數
在監測功能的優化設計過程中,內部因素以及外部因素都會對其有一定影響,對各項數據進行一系列的市場調研,進行模糊評判多個變量特征,因為這些特征符號不一,而且不在一個量級,因此在構造特征函數時,需要將其進行統一標準。通過模糊理論,并按照這些特征項的本質含義和實踐統計,得出每一項具有實際意義的隸屬度值,構造隸屬度函數。對其綜合評判并且進行響應面公式擬合得出各項系數,進而得出目標函數如下:

顯然,目標函數值f3(X)越大表示功能模塊的性價比越好。
4)總目標函數

式中:ε1,ε2,ε3均大于0,且 ε1·ε2·ε3=1,3 個子目標函數都是越大越好。
1.2.3 約束條件
1)浮性約束
無人艇優化計算后得到的排水體積,與設計的主艇體和支柱體的排水體積之和一致:

2)推力阻力平衡約束
螺旋槳有效推力與所受到阻力一致:
3)轉矩平衡約束
螺旋槳通過軸系收到的轉矩與螺旋槳受到的水動力矩一致:

4)定深直線航行平衡縱傾角約束
能夠使UUV 在水中一定深度直航穩定運動時,縱傾角不大于10°。
5)定深直線航行平衡舵角約束
UUV 在水中一定深度直航時,不排除外流場不穩定等因素的干擾,促使必須轉尾舵的舵角來恢復平衡,一般這個舵角不超過在±5°。
2 優化算法及綜合優化計算分析
2.1 優化算法
2.1.1 遺傳算法
遺傳算法(GA)其主要原理是借鑒并根據大自然的物種進化的原則,精選出一種最佳解決方案的過程[9-10]。按照“物競天擇、適者生存”的原理,將最優值的求解過程表示成個體的適者生存過程,并通過選擇、交叉、變異等使個體群逐代進化,輸出為全局最優解。
2.1.2 混沌算法
混沌優化算法(CA)是一種新的優化算法,具有非線性、遍歷性、隨機性等特點。一個混沌變量具有幾個方面的特點:隨機性;遍歷性,混沌變量可以不重復歷經空間內所有狀態;規律性。
2.1.3 粒子群算法
粒子群算法(PSO)是借鑒鳥類覓食現象而提出的一種新型優化算法,其特點具有易實現、收斂快、精度高等[11-14]。粒子群算法流程圖如圖2 所示。

圖 2 PSO 算法的基本流程圖Fig. 2Flow chart of PSO algorithm
2.2 優化計算及分析
本文的快速性、操縱性和功能特性3 個系統的初始權重設定如表1 所示。采用遺傳、混沌和粒子群3 種算法進行計算。
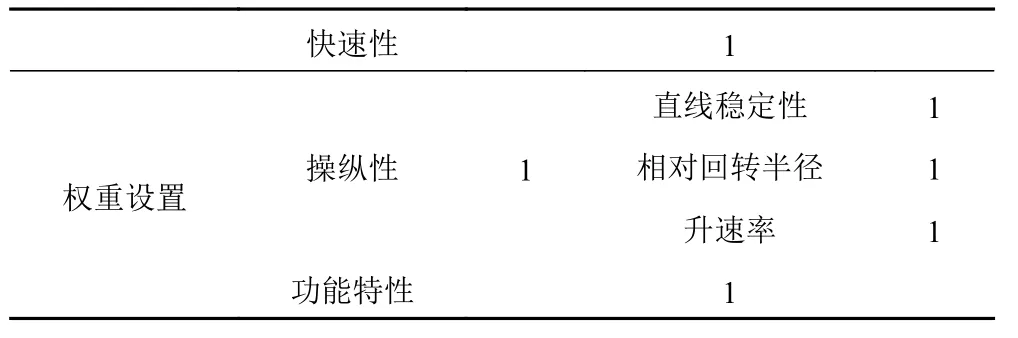
表 1 各優化系統初始權重設置Tab. 1 Set the initial weights of the optimization system
2.2.1 遺傳算法優化計算
主要的數據如下設定:選取遺傳代數為1 000~6 000,進化權重設成0.5,種群規模設成400,分別進行多次計算,選取各代數的最好結果,如表2 所示。
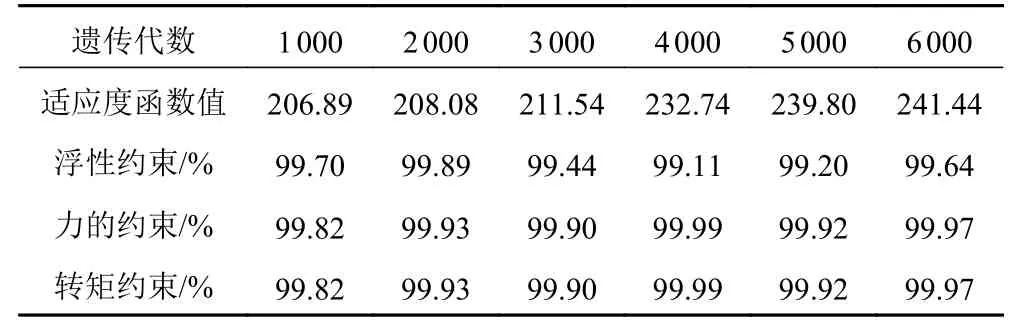
表 2 不同計算次數的計算結果Tab. 2 The calculation results of different calculation number
由表2 計算結果可以得出,約束條件均在99%以上。遺傳代數對目標函數值的影響如圖3 所示。
由圖3 可以看出,遺傳次數比較小的時候,函數值也相對較低,隨著遺傳代數的增加,其相應的適應度函數值也進行了正向的變化,并在一定程度上增加較快,最終到達了一個穩定的程度,增加緩慢,僅有小幅的波動。由此得出,遺傳次數達到5 000 代時,其相對應的適應度函數值趨于穩定,所計算的結果相對較優。

圖 3 適應度函數值隨遺傳代數的變化曲線Fig. 3Change curve of fitness function value with genetic algebra
2.2.2 混沌算法優化計算
本文在對混沌算法進行優化計算時,主要討論的是在混沌算法中優化代數對目標函數值的影響情況,如表3 所示。
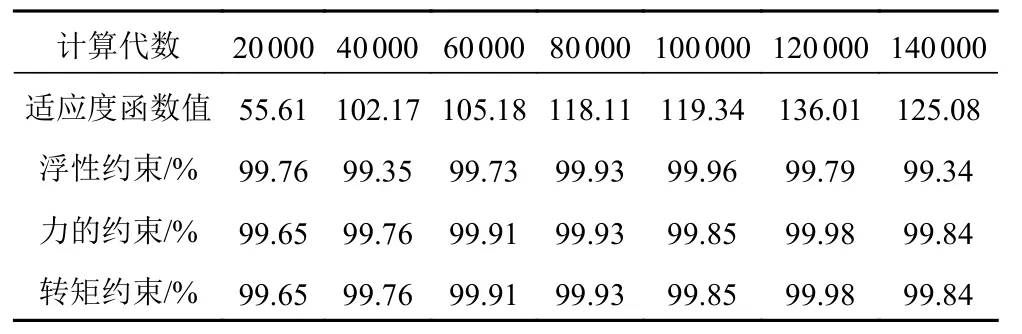
表 3 混沌算法不同迭代次數優化結果Tab. 3 The calculation results of different optimization algebra of chaos algorithm
由表3 計算結果可以得出,約束條件均在99%以上。
由圖4 可以看出,伴隨著混沌計算代數的增大,適應度函數值也表現出增大的趨勢,波動也相對較大。對比遺傳算法計算結果,可以看出,混沌算法的函數值普遍小一些,即采用混沌算法相對遺傳算法優化計算效果較差。
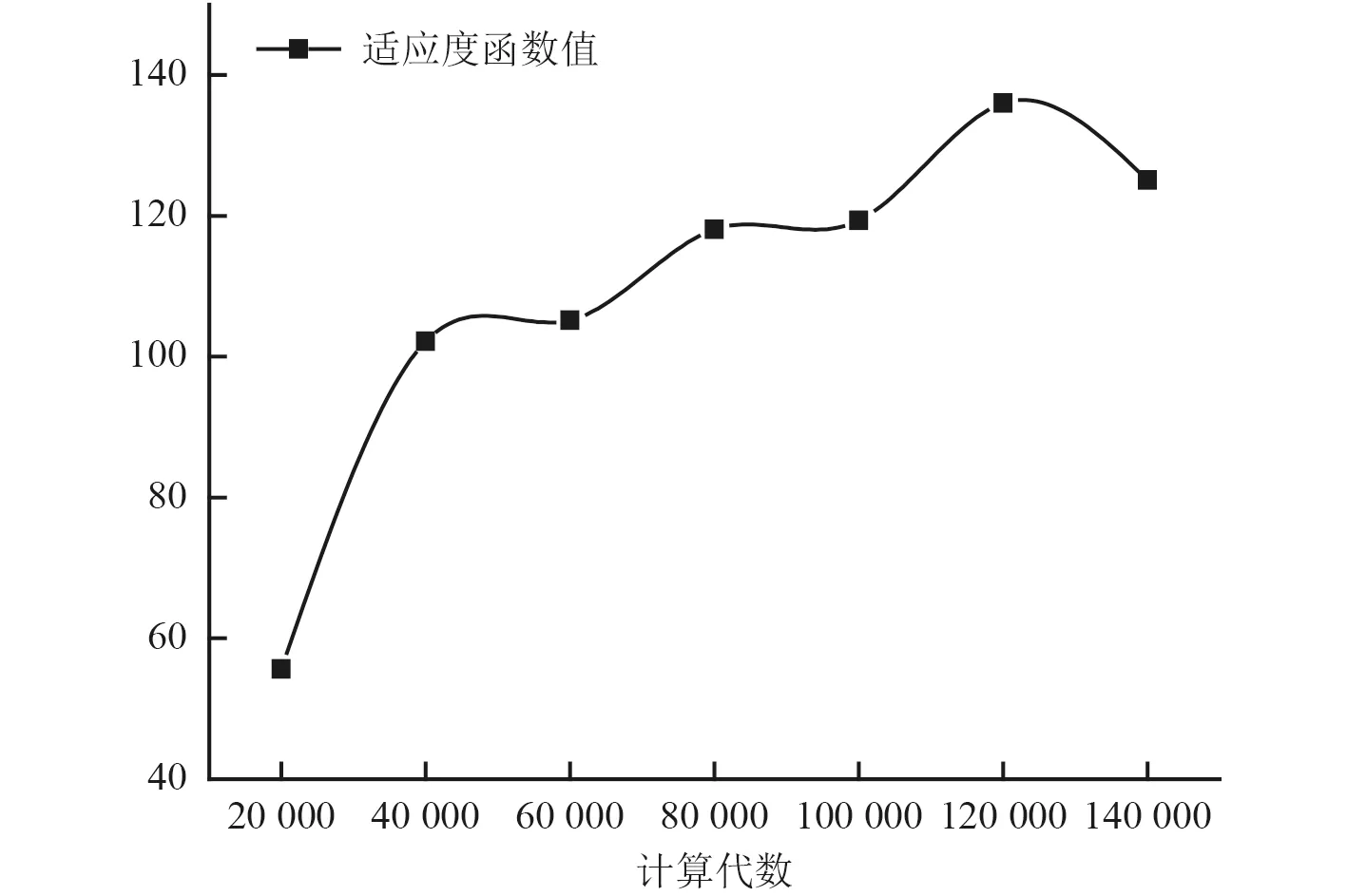
圖 4 適應度函數值隨計算代數的變化曲線Fig. 4Change curve of fitness function value with calculation algebra
2.2.3 粒子群算法優化計算
主要數據設定如下:種群規模400,最大粒子飛行速度與區間概率0.15,變權重0.9~0.4,選取6 組優化代數進行計算,計算結果匯總如表4 所示。
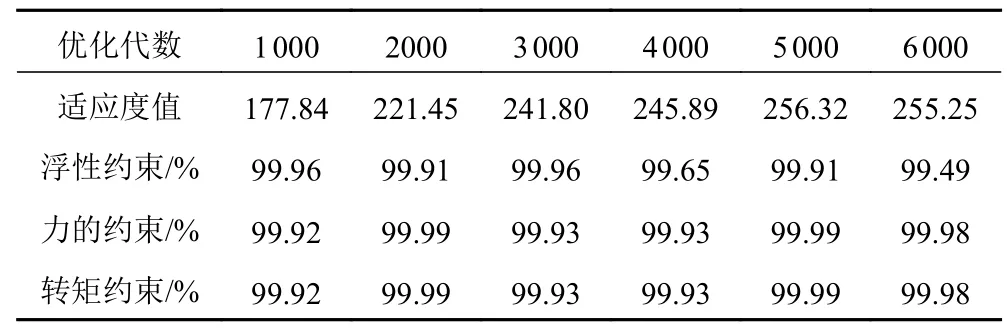
表 4 粒子群算法不同優化代數的計算結果Tab. 4 The calculation results of different optimization algebra of PSO algorithm
由表4 可以看出,所計算的數據值都相對較好,而且符合約束。
如圖5 所示,在計算到較大的代數時,適應度函數值表現出更加穩定,增加緩慢,或有細微的變化波動。由此得出,優化次數達到5 000 代時,目標函數值趨于穩定,所計算的結果相對較優。
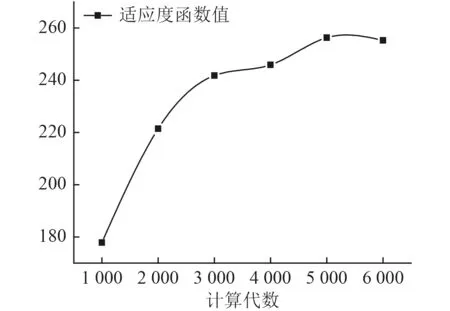
圖 5 適應度函數值隨計算代數的變化曲線Fig. 5Variation curve of fitness function value with calculation algebra
2.3 優化結果
根據上述幾種計算的結果不難看出,根據粒子群算法算出來的數據明顯更好,更符合要求,最終數據如表5 所示。
3 結 語
本文針對一種水下無人艇,設計一種支柱平臺對傳統艇型進行改進,使之能有效兼顧水面航態,結合快速性、操縱性、功能特性,構造總目標函數、約束條件以及懲罰函數,建立該型UUV 的綜合優化數學模型,分別使用遺傳算法、混沌算法和粒子群算法不同計算代數進行了該型UUV 的運算,從計算結果可以得出:
1)混沌算法計算結果的適應度函數值相對其他2 個算法較低,雖然遺傳與粒子群算法計算結果更接近,但整體還是粒子群算法所計算的更優,相對更穩定;
2)隨著計算次數的增加,3 種計算方法所計算的結果都呈現正向增加的變化趨勢,且當計算次數到達5 000 時,適應度函數一般達到最大值,并滿足約束條件;
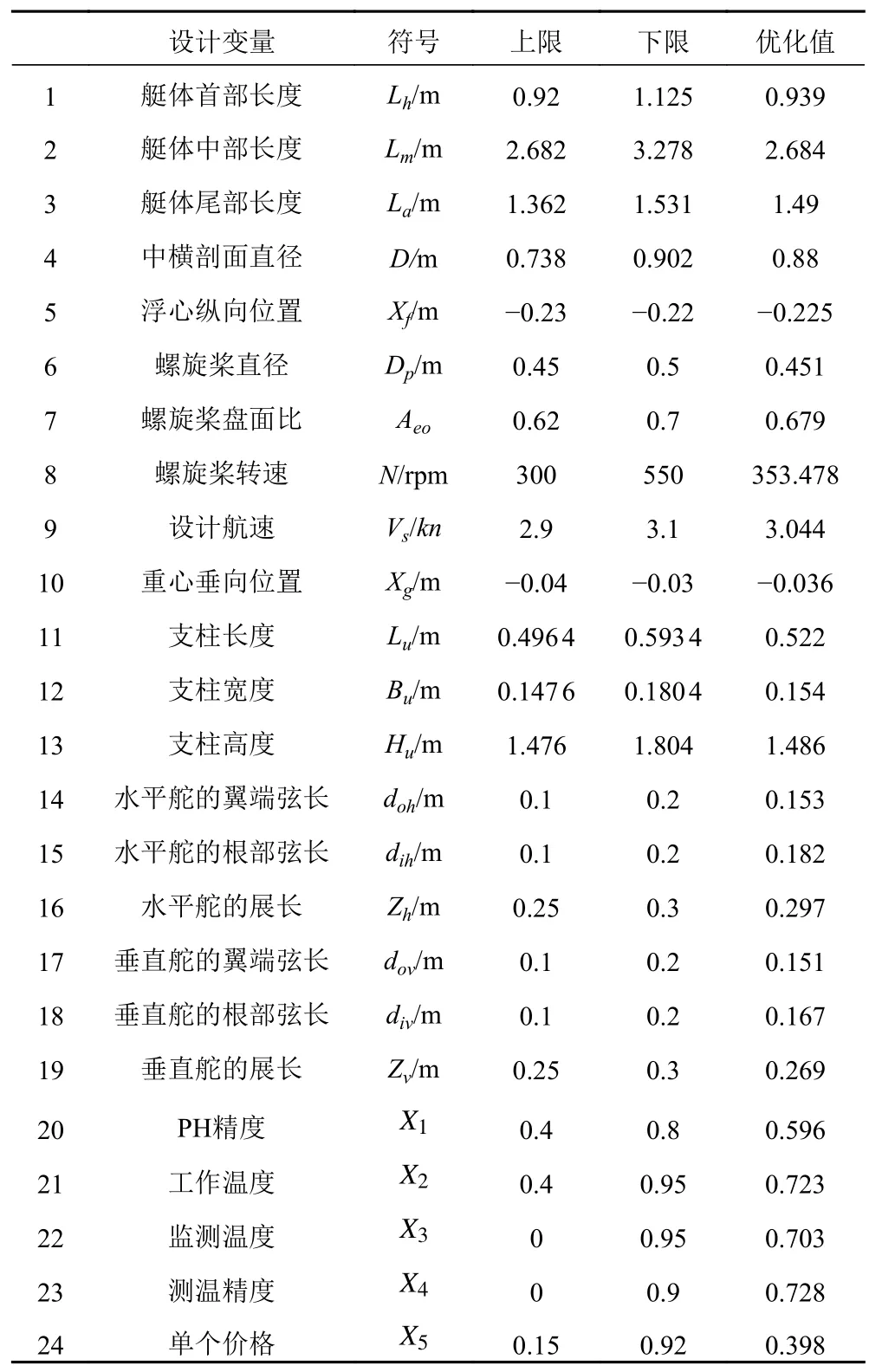
表 5 最佳優化的設計變量結果Tab. 5The best optimized results of design variables
3)相比其他2 種優化方法,使用粒子群算法得出的浮性約束、力的約束和轉矩約束的值多在99.9%以上,懲罰值更易達到1,更易滿足約束;
4)功能方面的結果提供了一個更優的參考值,可以更好選擇一個適合實際需求的功能設備,有效避免成本的過高與資源的浪費。
本文對傳統回轉體進行了改進,并對改進后的回轉體進行綜合優化。其相對優勢一是可有效提高穩定性,二是在工程實際應用尤其是軍事應用中可在主體與支柱內安裝可靠的升降裝置,使之對水面航態具有一定的兼顧性,具有更高的可靠性和操作性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
