某輕型電動貨車車架有限元分析及優化*
2021-01-20 11:41:46王維偉鄭再象夏宗寶方劍宇
南方農機 2021年1期
王維偉, 鄭再象, 夏宗寶, 方劍宇
(揚州大學機械工程學院,江蘇 揚州 225000)
0 引言
隨著社會經濟的發展, 輕量化成為我國汽車產業的主要發展目標。 據相關研究, 電動汽車總質量每降低500kg,百公里能耗將降低2.75%[1]。 輕型電動貨車作為如今物流運輸重要的交通工具, 它的輕量化設計將在減少能耗、延長續航里程、提高運輸效率等方面有重要意義。車架是汽車各總成部件的裝配基體,結構及受力復雜,目前國內部分輕型電動貨車車架是由傳統燃油車車架改裝而成,總體強度和剛度偏富裕,但局部薄弱,易導致早期疲勞破壞[2-3]。 采用理論分析法很難獲得精確解,試驗法耗時耗力,因此需要借助有限元法對原車架進行仿真分析,精確獲取車架的應力和位移分布云圖, 為后續的輕量化優化提供依據。
1 有限元分析
1.1 建立有限元模型
運用CATIA 建立輕型電動貨車車架三維模型, 將模型導入有限元軟件HyperMesh 中進行前處理。 為提高計算精度和效率,對模型進行如下簡化:車架主體結構采用矩形鋼管焊接裝配而成, 部分支座采用厚度焊接而成,所涉及的板厚有:3mm、4mm、5mm、6mm 和8mm。 為方便后續的優化設計, 采用殼單元PSHELL 對車架進行網格劃分。各部件之間采用焊接或螺栓連接而成,結合實際情況,現采用剛性單元RBE2 或三角形單元CTRIA3 來模擬。 以集中質量單元CONM2 來代替駕駛室、 駕駛員及副駕、電機、離合器、變速器、傳動軸、電池、控制器等的質量,集中質量單元與支車架的連接采用剛性單元RBE2。
本文的裝載質量均以集中載荷的形式施加在相關總成上,各部位具體質量如表1 所示。

表1整車各部件質量
在劃分網格時必須要考慮結構整體的單元規模、所需的計算精度和硬件的計算能力等[4-5]。 單元尺寸選擇既要保證整體單元質量合格, 減少后續的單元質量檢查與編輯的工作量,又要盡量減少單元總量,提高計算效率。 經對比分析,將車架主體部分模型按照10mm 的單元尺寸劃分,所建立的有限元模型如圖1 所示,單元總計634 988個, 其中CQUAD4 單元為622 352 個(98.01%),CTRIA3單元為12 549 個(1.98%),RBE2 單元為69 個,CONM2 單元為18 個。材料取Q235B,其物理學特性為:彈性模量E=206.5GPa,屈服強度為235MPa,強度極限為375MPa,泊松比0.3,密度為7.83×103kg/m3。 根據第四強度理論,材料不發生塑性變形的條件為:

式中:σeq為等效應力(或者稱為Von Mises 應力);σ1為第一主應力,σ2為第二主應力,σ3為第三主應力,[σ] 為材料的許用應力,即屈服應力。 當等效應力σeq與許用應力[σ]滿足式(1)關系時,認為此時強度滿足設計需求。

圖1 車架有限元模型
1.2 典型工況分析
對滿載運動(動態)、驅動、緊急制動、轉向、扭轉(單輪懸空)等工況進行對比分析后,取最危險的滿載彎曲、扭轉2 種工況展開研究,具體如下。
1)滿載運動:汽車在良好狀況的路面滿載勻速行駛時,忽略空氣阻力的影響,車架受到的載荷形式主要為垂直方向重力的載荷, 動載荷系數取保守值2.0。 邊界條件方面,約束左前輪X、Y、Z;右前輪X、Z;左后輪Y、Z;右后輪Z 方向自由度,釋放4 點全部轉動自由度。
2)右前輪懸空:在凹凸不平的路面行駛時,車輪會出現懸空的情況,此時車架受到較大扭矩。 由于該工況下車速一般較低,動載荷系數受車速影響較小,取保守值1.3。右前輪懸空時的邊界條件, 只需在滿載運動的基礎上釋放右前輪的約束。
1.3 仿真結果分析
1.3.1 滿載運動工況

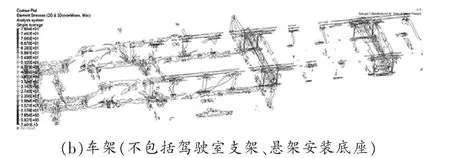
圖2 車架應力分布云圖
滿載運動工況下,車架所受的最大應力為297.6MPa,位于車架后右支座處;另外,駕駛室后左支座和前左支座應力也比較大,均接近材料的屈服極限,如圖2(a)所示。 去掉駕駛室支座、 懸架安裝支座后, 車架最大應力為78.5MPa。 圖3 為車架的位移分布云圖, 可見在Z 方向上最大位移僅為0.47mm。

圖3 車架Z 方向位移云圖
1.3.2 右前輪懸空
圖4 給出了右前輪懸空時車架的應力分布云圖(≥100MPa)。 從圖中可以看出,車架上應力比較大的地方位于駕駛室支座、中間和后電池箱與車架連接處、前懸架與車架連接處等,其中最大應力為427MPa,超過了材料的屈服極限。 如圖5 所示,車架在Z 方向上的最大位移達到了3.07mm。

圖4 車架應力分布云圖

圖5 車架Z 方向位移云圖
兩種工況仿真結果表明, 車架整體強度和剛度非常高,但局部又存在明顯不足,需要進一步優化,以滿足車架設計要求,同時可在最大程度上減輕車架的質量。
2 優化設計
2.1 確定目標函數
取質量作為優化目標,通過改變零件厚度的方式實現輕量化,不需要重新建立有限模型。 目標函數M(T)表達式見式(2):

式中:Vi是第i 個零件的體積;ρi是第i 個零件的密度;Si是第i 個零件的中面面積;Ti是第i 個零件厚度;i 零件序號,i=1,2,3……245。
本次優化設計變量為245 個,為了減少工作量且優化后尺寸符合厚度制造規則,步長選取0.2mm。 本次優化的約束條件為剛度與強度要求, 強度要小于許用應力200MPa,最大位移范圍取[-4.0,+4.0]mm。工況選擇滿載運動工況,動載荷系數取保守值2.0,以加速度的形式加在相關總成上。
2.2 優化計算及結果分析
運用Optistruct 模塊對車架245 個部件進行優化,迭代23 次, 體 積 從4.250 97×107mm3優 化 至3.056 46×107mm3,最大位移從1.17mm 增大到了1.57mm。
優化后,245 個部件中有220 個得到了減重,7 個部件維持原有質量,18 個部件質量增加。 但零件規格明顯增多,達到20 多種,大幅提高了制造成本。綜合實際生產,對上述優化結果進一步調整, 最終將零件規格下降至7 種,質量由332kg 降低至222kg,減重率達33%。 對優化后的車架再次進行靜態力學仿真分析, 在滿載運動和右前輪懸空工況下, 車架的最大應力分別為168.3MPa 和326.2MPa, 如 圖6 所 示, 最 大 位 移 分 別 為0.68mm 和4.48mm,滿足強度和剛度需求。

圖6 車架應力分布云圖
2.3 車架模態分析
對優化后的車架進行模態分析, 并與優化前的結果進行比較分析,結果如圖7 所示。 優化后車架同階的固有頻率均小于優化前,且最小固有頻率為11.96Hz,處于路面的激勵頻率之內,但遠大于路面能量的最大激勵頻率范圍,各階固有頻率基本避開了驅動電機的激勵頻率[6-7]。

圖7 優化前后車架各階固有頻率對比
3 結論
對某輕型電動貨車車架進行有限元分析及優化,得出以下結論:
1) 改裝傳統燃油貨車車架作為電動貨車車架的方法,后者總體剛強度達到需求或偏富裕,但也存在局部薄弱的情況,需要進行優化設計。
2) 采用有限法可精確獲得車架的應力和位移分布情況,為車架設計提供理論依據。
3) 在滿足車架強度和剛度要求的前提下, 通過自動尋優,可有效降低車架的總質量。
4) 優化后,車架各階固有頻率均有所下降,但基本避開了外界常見的激勵頻率,所分析的結果是有效的。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
汽車觀察(2016年3期)2016-02-28 13:16:26
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
