自校正自適應控制系統的設計與研究*
2021-01-20 11:41:48蔣兵兵
南方農機 2021年1期
蔣兵兵, 李 玲
(湖南鐵路科技職業技術學院,湖南 株洲 412000)
0 引言
隨著工業自動化的日益發展, 控制系統的復雜性越來越高,對于一些具有非線性、不確定性、強耦合的系統采用常規控制已不能滿足控制要求, 于是自適應控制的概念出現[1-2]。 它的研究對象為具有不確定性的系統,通過及時更正控制器的特性以適應被控對象的參數變化和動態擾動,使整個控制系統始終獲得滿意的性能。
1 自校正控制的基本思想
自校正控制也稱為參數(估計)自適應控制。 它的基本思想為[3]:在掌握結構的基礎上,將模型參考估計與控制設計結合起來,通過對模型參數的辨識,確定與其有關的控制器參數,或者直接估計控制器參數,并由控制器算出控制量。
自校正控制的結構框圖如圖1 所示, 由參數估計器、控制器設計、控制器和被控對象四部分組成。 主要工作集中在參數估計器、控制器設計上。
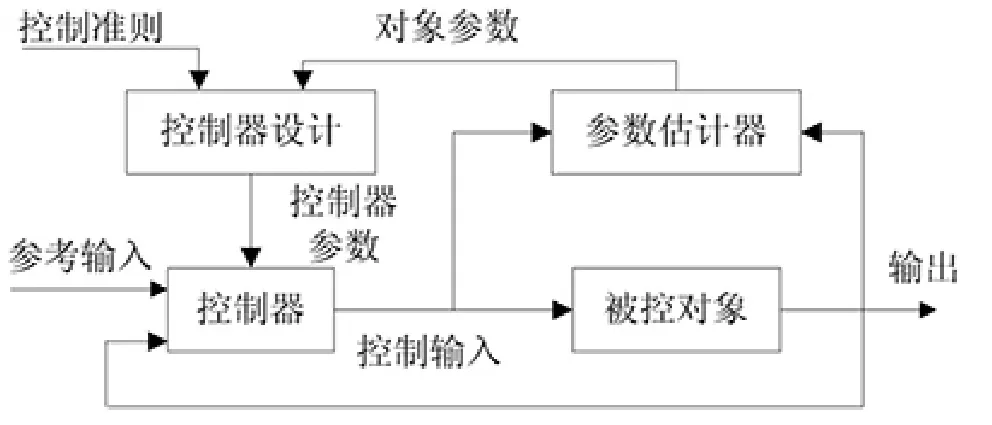
圖1 自校正控制系統典型結構方框圖
本文選用間接自校正控制系統進行設計與研究,擬采用遞推最小二乘法對參數估計器進行參數估計, 用極點配置法來完成控制器設計, 從而完成自校正控制系統的設計。
2 帶有遺忘因子的最小二乘法的參數估計器
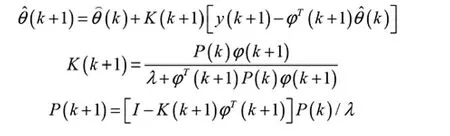
最小二乘法(Least Square Method) 具有原理簡單明了、算法簡便快捷、約束較快、易于理解掌握的特點,所以它被廣泛應用在參數估計之中。 遞推最小二乘法的估算公式為:

遞推最小二乘法往往有一個缺陷:會時不時出現“數據飽和”的問題。 隨著k 的逐漸增大,K(k+1)與p(k+1)就會變得越來越小,式(1)中的修正能力變弱。 這就會導致出現以下情況:參數估計值很難接近真實的數值;當參數真值時不時發生變化的時候,最小二乘法就無法跟蹤到這種變化,從而導致實時參數辨識失敗。 因此可以采用帶有遺忘因子的遞推最小二乘法。
取性能指標:

式中:W 為加權對角陣。
根據遞推最小二乘的推導思路,可以推導出具有遺忘因子的遞推最小二乘估計公式:
3 具有自校正自適應功能的控制系統設計
3.1 極點配置設計
極點配置(Pole Placement)設計在控制系統設計中是一種經常用到的設計方法, 它具有能適應逆不穩定系統和開環不穩定系統的情況, 并且還具有設計方法直截了當、動態性能良好、系統穩定的特點。
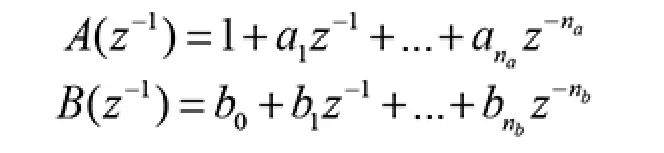
假如設定已知的被控對象或過程用下列方程來進行描述:

式中:y(k)、u(k)和v(k)分別為系統的輸出、控制和干擾,d 為純干擾。
設計控制器為:

這里F(z-1)、R(z-1)和G(z-1)為待定多項式。
該系統的輸出表達式為:
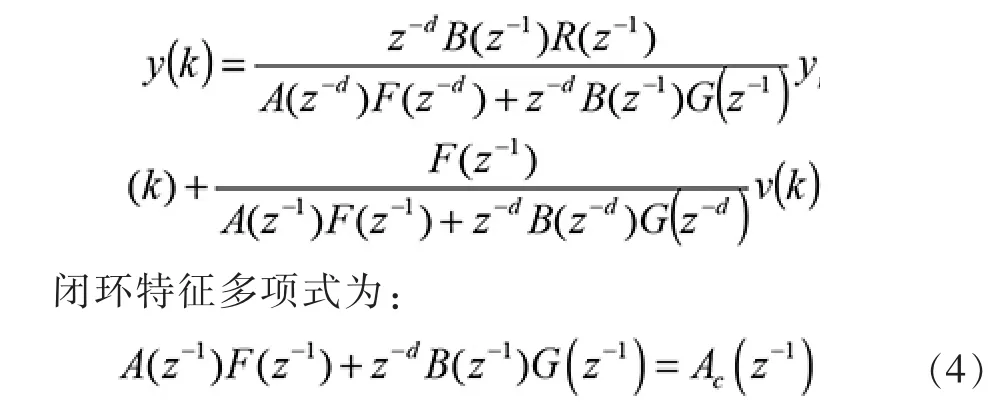
式(4)常常稱之為Diophantine 方程式。
設定期望得到的輸入/輸出表達式為(不考慮干擾因素或者環節):

為了簡便明了, 將以上所有式中括號內出現的z-1省去,例如A(z-1)簡化為A。
然后在輸出環節中, 讓關于參考模型輸入的傳遞函數與期望得到的傳遞函數相等,即

已知:過程多項式A、Z-dB;
性能要求:期望的傳遞函數分母多項式Am;
相容條件:

1) 對多項式B 進行因式分解:B=B-B+;
2) 確定了F1、G 和A0的階次(最大限度的低),并且A0的系數是由不低于Am 響應速度來確定的;
3) 根據Diophantine 方程式的簡化形式求出F1和G;
4) 確定F 和R,算出控制量。
3.2 間接自校正控制方法
很多情況下,過程參數未知或時變,就要采用參數估計的方法來進行設計。 首先按分離性原理對控制器的極點配置進行設計,接下來的任務就是來設計估計器。 通常采用遞推最小二乘。 將參數估計的結果用于求控制器的參數F(z-1)、R(z-1)和G(z-1)的系數,然后計算控制量,也稱為間接自校正控制方法[4]。
設定被控對象或者過程模型公式如式(2)所示,則
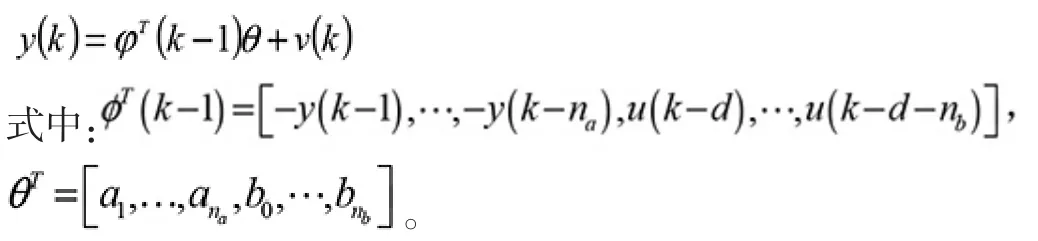
采用具有遺忘因子(λ)的遞推最小二乘法,其參數估計公式為:
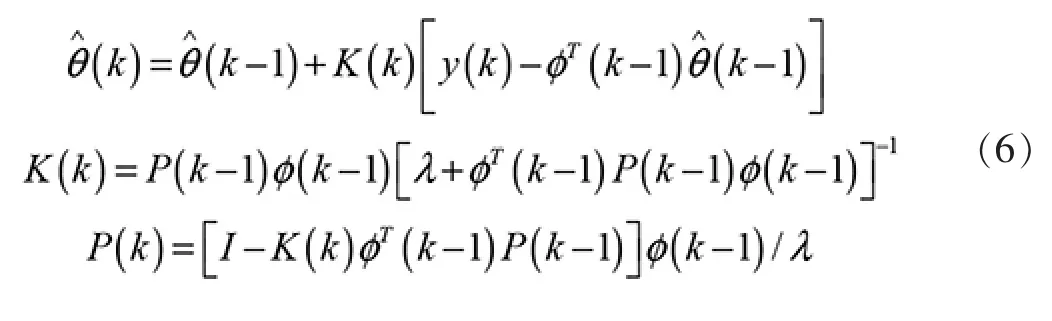
用具有遺忘因子遞推最小二乘法和極點配置法的間接自校正控制算法流程圖如圖2 所示。

圖2 控制算法與信號流程圖
以某一過程的脈沖傳遞函數和期望傳遞函數為例
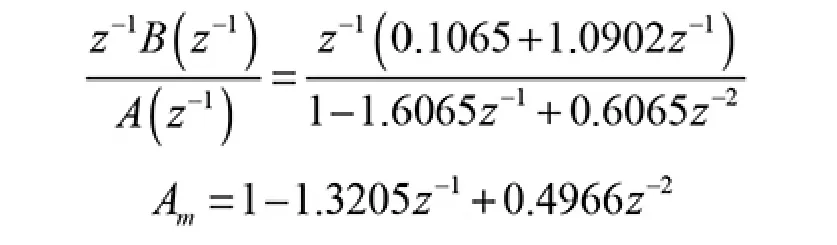
假設上述過程具體參數未知,用極點配置法設計間接自校正控制系統,采用方波作為參考輸入,幅值為1。 仿真條件為零點不被對消的情況,取初值。
3.3 基于PID 結構的間接自校正控制
PID (Proportional Integral and Differential Controllers)控制器的離散全量方程式為:

式中:kp為比例增益;積分時間常數為ki;微分時間常數為kd;采樣周期為Ts。
離散增量公式為:

由以上公式可以得出結論:PID 中的參數kp、ki和kd已經被新的控制器中的參數go、g1和g2所替代。 由此對式(7)進行Z 變換,可以得到離散量脈沖傳遞函數為:
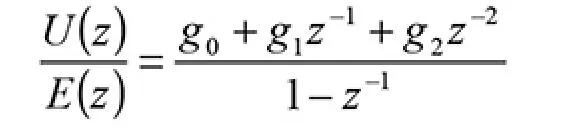
由此可以推導出以下公式:


基于PID 的間接自校正控制算法為:
已知:na、nb和d;給定:Am(z-1);
1) 用帶有遺忘因子遞推最小二乘法估計對象或過程參數;
2) 由diophantain 方程式求gi(i=0,1,2);
3) 由式(8)求u(k);
4) 當k=k+1,又會返回步驟(1)。
盡管基于PID 的間接自校正控制系統在本質上仍然屬于極點配置間接自校正控制方法, 但是在待計算的控制器參數僅有3 個,計算的工作量小。
舉例分析:某一過程的脈沖傳遞函數和期望傳遞函數
假設上述過程參數未知, 用基于PID 結構的間接自校正控制算法設計系統。 通過MATLAB 仿真[5],仿真的結果如圖3、圖4 所示。
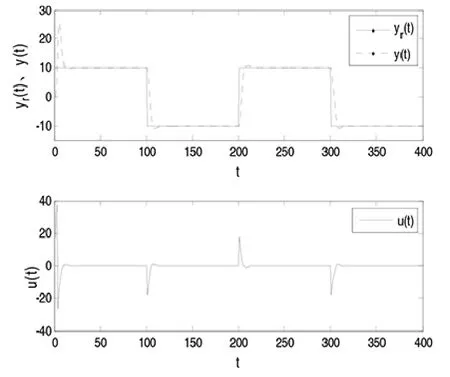
圖3 系統輸出波形、控制波形
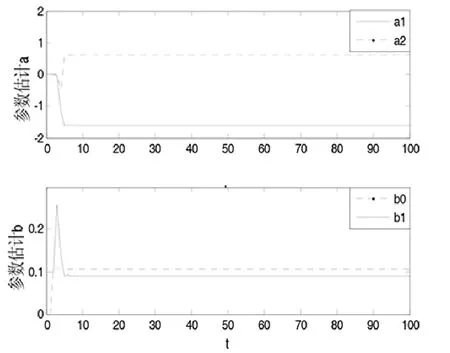
圖4 過程參數的估計波形
仿真結果表明系統有很好的穩定性和快速性,系統的輸出跟隨系統的輸入,實現了過程參數的實時估計。 因為該算法的控制器的待求參數只有3 個,計算量小。
4 結論
通過上面理論分析與MATLAB 仿真可以看出, 一種基于PID 的間接自校正自適應控制系統具有較好和可行的控制性能。 本文僅從系統內部本身去分析,從控制系統特征方程的根入手,對自校正自適應控制系統的穩定是有益處的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
