基于C#的直臂式擦窗機配重的優化計算
2021-01-20 11:41:56王彩濤沈俊杰
南方農機 2021年1期
王彩濤, 沈俊杰, 李 靜
(長安大學,陜西 西安 710064)
0 引言
擦窗機作為一個高空載人作業設備, 為保證擦窗機工作的可靠性, 保證工人的安全以及保護施工方的財產不受損失,合理的選擇配重塊布置位置至關重要。 為了保證擦窗機在全伸與全縮時都能夠滿足穩定性要求可以采用雙配重塊的方案, 將配重塊分別布置在平衡臂尾部和立柱回轉中心處, 本文將借用VS 的winform 平臺,C# 程序來計算出最優化的布置方案。
1 數據提取
本文中所使用的數據來源于擦窗機參數化設計平臺提供的,數據存儲于excel 表格中[1]。 通過C# 語言后臺提取擦窗機各級臂、立柱、底架、質量質心,以及平衡臂長度、最大工作長度、最小工作長度。 核心代碼如下:
Excel.Application XAPP = new Excel.Application();
Excel.Workbook XBOOK = XAPP.Workbooks.Open(“路徑.xls”, Missing.Value, Missing.Value, Missing.Value, Missing.Value, Missing.Value, Missing.Value, Missing.Value,Missing.Value, Missing.Value, Missing.Value, Missing.Value,Missing.Value);
Excel.Worksheet XSHEET =(Excel.Worksheet)XBOOK.Sheets["SHEET1"];
X = XSHEET.Cells[A][B].Text.ToString()。
2 配重優化計算
擦窗機配重塊一般布置在平衡臂尾部, 這樣可以最大限度減少擦窗機的整機質量, 保證擦窗機在全伸時的穩定性, 有時配重塊質量過大會導致擦窗機在停機狀態時發生側翻。因此,可以采用雙配重的布置方式,配重塊1布置在平衡臂尾部, 配重塊2 布置在立柱回轉中心處,這樣配重塊2 在伸縮臂全伸與全縮時均起著穩定力矩的作用,如圖1 所示。
擦窗機的穩定性可以通過最大傾覆力矩直觀的表現出來, 本文將傾覆力矩轉化為作用在行走輪上的一對力偶,通過合理的分配兩個配重塊的質量,使四個行走輪的最大輪壓與最小輪壓比小于一個定值。 隨著配重塊2 的質量增加以及整機質量的增加,限定最終方案行走輪的最大輪壓不超過配重塊2 質量為0 時最大輪壓的3%。 優化計算流程如圖2 所示。
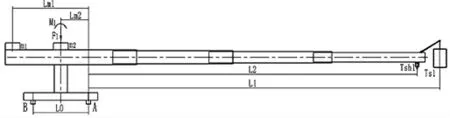
圖1 配重塊布置方案
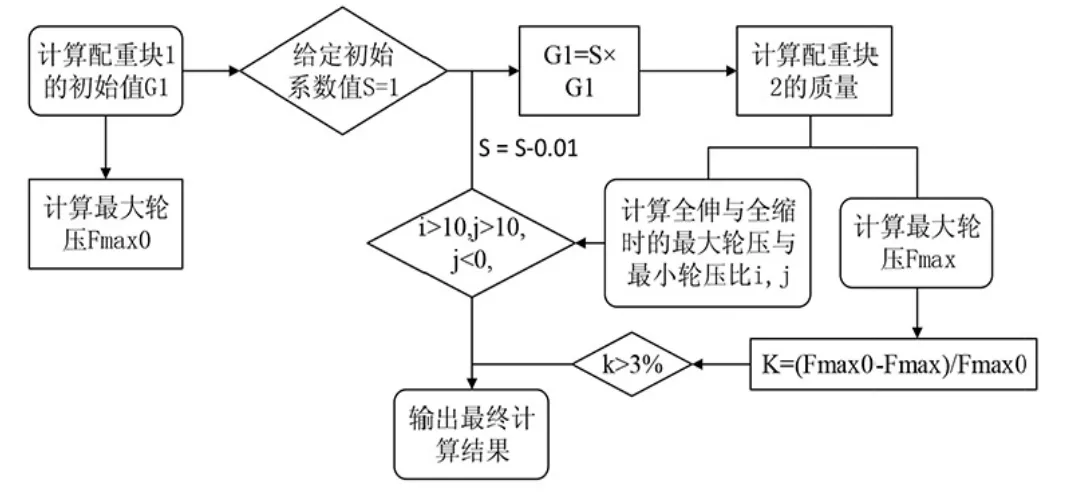
圖2 配重優化計算流程
2.1 伸縮臂受力的簡化
為了計算的簡便,將立柱上方伸縮臂及臂頭受力簡化到立柱回轉中心處,一是垂直方向受力,二是作用在立柱回轉中心處的彎矩M。
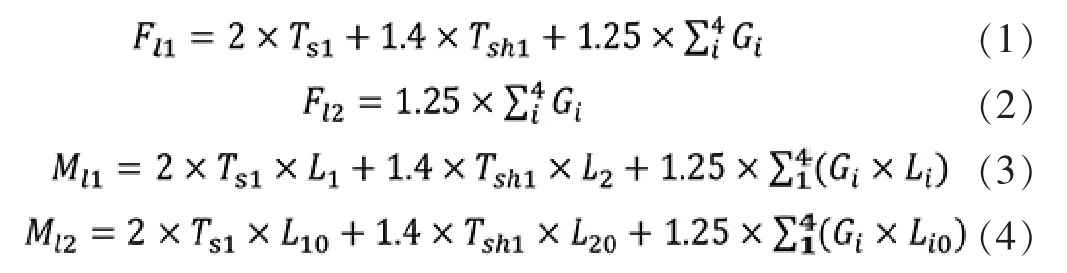
式中:Fl1/Fl2-伸縮臂全伸與全縮時垂直方向受力;Ml1/M12-伸縮臂全伸與全縮的彎矩;Gi-各級臂質量;Ts1-吊籃總重力;Tsh1-吊鉤總懸掛重力;Li/L1/L2-伸縮臂全伸時各級臂、吊籃、吊鉤距立柱回轉中心距離;Li0/L10/L20-伸縮臂全縮時各級臂、吊籃、吊鉤距立柱回轉中心距離。

式中:R1-吊籃額定載荷;Swp-吊籃自重;Mwr-吊籃位于最低點時鋼絲繩質量;Mc-電纜質量。
2.2 配重塊1 的初值計算
根據擦窗機國家標準GB/T 19154-2017 中穩定性要求[2],擦窗機在全伸時對于A 點應滿足式(4)的平衡條件:

式中:Gd-底架質量;Gl-立柱質量;L0-輪距。
令配重塊2 的質量m2=0, 可以得出滿足全伸穩定性要求的配重塊1 質量初值m1。
2.3 配重塊2 質量的計算
為了確定一個滿足全伸與全縮兼滿足穩定性要求的配重塊質量m1與m2,本文引入一個質量系數S,在確定配重塊1 的初始質量m1后,給配重塊1 乘一個質量系數S,如式(7)。 取新的配重塊1 的質量m1,再根據穩定性條件(6)計算配重塊質量2 的質量:

配重塊2 質量m2需要在伸縮臂全縮時同樣滿足穩定性條件,如式(8):

2.4 輪壓計算
確定了配重塊1 與配重塊2 的質量后,整機質量就確定了。 將整機彎矩與整機傾覆力矩簡化到沿立柱回轉中心處,如下式:
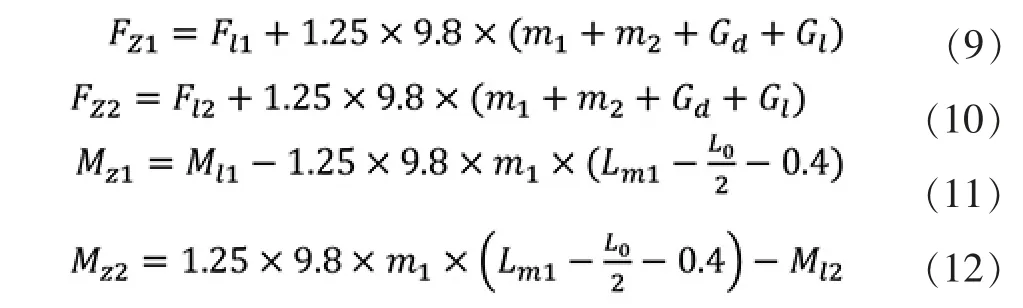
式中:FZ1/FZ2-伸縮臂全伸與伸縮臂全縮整機重力;Mz1/Mz2-伸縮臂全伸與伸縮臂全縮時沿立柱回轉中心的整機彎矩。
根據式(9)~(12)可以計算四個行走輪在伸縮臂全伸與全縮時的最大輪壓Fmax與最小輪壓Fmin。 如下式:
式中:Fmax1/Fmin1-伸縮臂全伸時最大輪壓與最小輪壓;Fmax2/Fmin2-伸縮臂全縮時最大輪壓與最小輪壓;i/j-伸縮臂全伸與全縮時的最大輪壓與最小輪壓比。
為了使擦窗機工作穩定性更好, 可以限制最大輪壓與最小輪壓比i<10,j<10。 此外,當伸縮臂全縮時,如果不滿足穩定性要求,則Fmin2<0,即j<0。因此,當質量系數S 不滿足以上三個條件時,令S=S-1,繼續計算得出新的配重塊1 與配重塊2 的質量,直到滿足條件為止[3]。
此外,當S=1,即配重塊2 的質量m2=0 時會得出一個最大輪壓值Fmax0,在確定最終方案時又會得出一個最大輪壓值Fmax,當最大輪壓值Fmax超過Fmax03%時,如式(16),停止迭代。

3 后臺界面與功能
上述數據的提取以及優化計算的過程都是通過C#后臺程序以及winform 平臺交互實現的,圖3 為擦窗機配重優化計算后臺搭建的界面[4]。
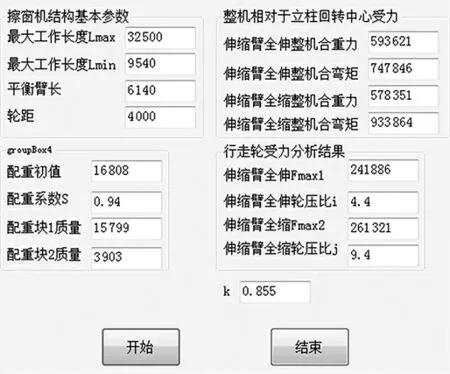
圖3 擦窗機配重優化計算界面
當點擊開始按鈕時,后臺程序在指定文件夾下讀取數據庫并提取需要的數據并開始配重優化計算,將整機的基本結構參數以及計算結果輸出到最終界面當中。 當需要優化計算另一組擦窗機的配重時,需要將后臺數據庫文件名字改為“配重計算參數匯總”。 當分析結束后,點擊結束按鈕停止程序運行。
4 結論
當伸縮臂最大臂長小于30 000mm 時,一般不需要雙配重,當伸縮臂最大臂長大于30 000mm 時,最大輪壓與最小輪壓比較大,或者是在全縮時不滿足穩定性要求,采用雙配重的布置不僅可以滿足穩定性要求,還可以合理的分配行走輪的受力。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
汽車觀察(2016年3期)2016-02-28 13:16:26
