奔馳網絡架構發展與典型故障案例(上)
2021-01-22 06:36:28河南劉勤中
汽車維修與保養 2020年10期
關鍵詞:結構
◆文/河南 劉勤中
奔馳車載網絡架構的發展史,基本上也是汽車網絡架構的發展史,依據結構和所使用的技術進行分類,奔馳網絡發展可分為4代(圖1)。
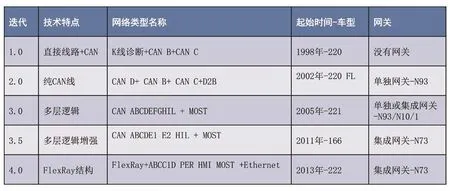
圖1 奔馳網絡架構發展歷程
第1代的技術特點是直接線路(K線)+CAN總線。在這個版本網絡架構中,雖然使用了CAN網絡技術,但是沒有控制單元作為網關。為了進行診斷,不同功能的控制單元不得不在X11/4(OBD接口)上設立專門的診斷數據線。從這一代開始,就設立了以CAN-B與CAN-C為核心的網絡布局方式。更早的車型上網絡只有CAN-C,再早的只有發動機電腦可以診斷。
第2代的技術特點是純CAN線。在2002年220 FL(中期改款)上市時,網絡架構發生了變化,同時期的其他車型,比如210也都已經采用了這種結構。相比第1代,第2代最大的不同是采用了單獨的中央網關控制單元N93進行統籌管理,這樣X11/4上的導線數量得到了減少。這種結構也是我們所熟悉的結構,也是很多其它品牌采用的結構。
第3代的技術特點是多層邏輯。隨著2005年221車型的上市,標志著全新一代的網絡架構的誕生,奔馳網絡圖(圖2)也是從這時候開始變的復雜起來。

圖2 奔馳第三代網絡架構圖
從第3代網絡架構開始,奔馳對于網絡功能有著非常明確的分類,分別對應不同的功能區域,包括CAN-A是遠程信息處理網絡,CAN-B是車內網絡,CAN-C是傳動網絡,CAN-D是診斷網絡,CAN-E是底盤網絡,CAN-F是中央網絡,CAN-G是前端網絡,CAN-H是動態網絡,CAN-I是傳動網絡,CAN-L是混動網絡。再加上信號采集及促動控制模組SAM與熔絲盒集成在一起,線束插頭很多。CAN-E雖然也經過信號采集及促動控制模組SAM(N10),但是只是“過橋”,目的是方便線束布置和裝配,信號采集及促動控制模組SAM(N10)不是CAN-E的用戶,而是CAN-B的用戶,所以大家在看電路圖時,容易迷失方向。
多層邏輯結構,只有一個網關是無法完成的,在網絡中,有非常多的小網關,比如發動機控制單元N3/10,娛樂主機A40/3。如果小網關癱瘓,那么小網關下屬的網絡將不能被診斷到。這種多層邏輯結構,有著非常強的上下級關系。許多同行常用“大哥”、“小弟”這樣的通俗化稱呼來區分層級的高低。如:遠程信息處理CAN(CAN-A)的網關娛樂主機A40/3就是掛在中央CAN(CAN-F)上,要再經過中央網關N93才可以與其它CAN總線或診斷儀進行數據通信,換句話說N93就是大網關,A40/3是小網關;又如:發動機控制單元是CAN-C的大哥(網關),如果大哥掛了,那么CAN-C上的變速器控制單元Y3/8n4、換擋模塊控制單元A80、油泵控制單元N118也就無法通信。
當然不是所有同時連接兩條CAN線的控制單元都是網關,比如點火開關N73,連接了車內CAN-B和底盤CAN-E,但是它并不是網關,只是他需要單獨與兩條CAN總線進行數據交換,但并不承擔兩條總線之間的數據交流。
奔馳221車型的網絡架構作為母版,在減配后,使用在了后續生產的其它車型上,其中204和212車型的中央網關N93集成到了信號采集及促動控制模組SAM(N10/1)中。當時SUV車型還在使用第2代的網絡架構。同時期的其他品牌車型的網絡架構就簡單許多,一般是一個中央網關負責全車電腦的通信。
第3代網絡架構另外一個改進就是通信娛樂系統由第2代采用的D2B技術升級為MOST技術,均為光纖傳輸,傳輸速率提高了4倍。
第3.5代(圖3)的技術特點是多層邏輯加強版。當第3代網絡架構運用到SUV車型后,恰逢2011年166(ML)車型上市,加之新的技術與166的定位,第3代網絡架構發生了細微變化。這種細微變化也為第4代網絡架構打下了基礎。這些變化主要體現在底盤CAN-E上,出現了CAN-E1和CAN-E2兩條底盤CAN,在功能區域上,都屬于底盤,都需要底盤的數據,但是又有不同,所以不得已使用數字來區分了。

圖3 奔馳第3.5代網絡架構圖
除了底盤CAN的區別,原來獨立的中央網關N93集成到了點火開關N73中,其實集成與獨立(如:傳動系統控制單元N127從發動機控制單元N3/10中獨立出來,N3/10不再承擔網關的職能,只專注于發動機本身的管理和控制,對外交流等網關的功能由N127承擔),在奔馳車型技術的發展中都出現過,但隨著科技的發展,集成化是大勢所趨。
第4代的技術特點是采用FlexRay結構(圖4)。2013年奔馳222車型的上市,標志著FlexRay通信技術正式在奔馳車型上廣泛使用。在此基礎上,減配后的FlexRay網絡,陸續被205、253、213等后續車型采用。
第4代網絡架構解決了第3.5代的命名的問題,取消了E1和E2的叫法。在功能區分上,參考了第3代的分法。
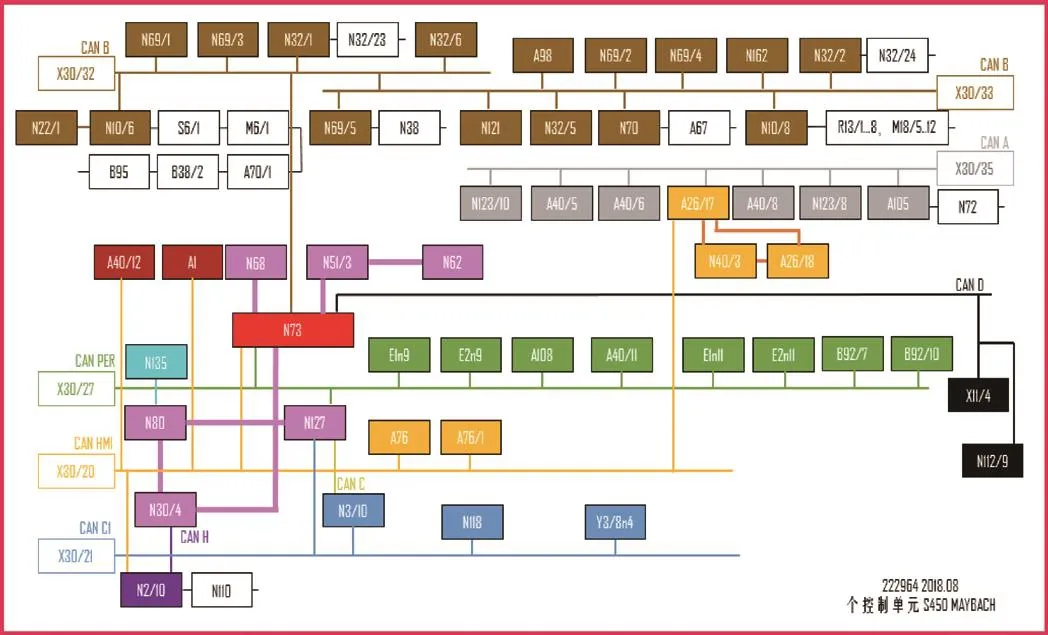
圖4 奔馳第4代網絡架構圖
第4代網絡架構中,FlexRay的加入,替代了之前的底盤CAN-E1或者底盤CAN-E。在第3代或者第3.5代中,大燈都歸入了底盤相關的網絡中。由于大燈模塊不需要FlexRay高速傳輸,在第4代中還是安排在CAN網絡中,由于大燈在車輛周圍,所以有了外圍CAN PER。
第4代中CAN HMI和第3代中的中央CAN(CAN F)有著相同的定位,都是掛娛樂主機的地方。那么用戶界面也就容易理解了。安全帶A76和A76/1、儀表A1、娛樂主機A26/17,這些都是駕駛員能直接接觸和看到的模塊,所以起名用戶界面CAN HMI。
此外隨著213 FL中期改款引入新一代方向盤后,由于帶觸摸控制功能的按鈕組N163/1和N163/2數據量的增加和傳輸速度的需求,轉向柱管模塊控制單元N80和方向盤電子裝置N135由LIN線通信升級為方向盤CAN(CAN LR),轉向柱管模塊控制單元N80構成與其他總線系統相連的控制單元之間的數據交換接口(網關),傳輸速率為 125 kbit/s。
FlexRay技術本身的結構,并沒有固定下來(這說明正在發展過程中),在不同車型,不同配置下,FlexRay的結構都有區別。在222車型上,共有6條FlexRay,星形結構,N127是第2條FlexRay的終端節點;而205只有1條FlexRay,線形結構,N127是中間節點;
在2015年后,奔馳采用了新的車型命名體系,這也意味著轎車與SUV兩條產品線的融合,這種融合也會體現在技術的融合上,第4代的網絡架構也在不斷的發展中,比如在2018上市的177車型和2019年上市的167車型。
在新款車型中,很多功能相近的模塊,進行了集成,比如205和213橫擺率傳感器B24/15被集成到氣囊控制單元N2/10中,177的空調控制單元N22/1和整條CAN B的分配器都被集成到了SAM中,213的360度攝像頭控制單元N148集成到駐車控制單元N62中,167的無鑰匙進入/起動(KG)控制單元N69/5集成到了電子點火開關N73中等等。每一代網絡架構的迭代,都會傳承上一代的優點,又會根據芯片和通訊技術的發展以及新功能的需求進行相應的調整和創新,不斷的優化和集成。
下面通過3個與網絡相關的故障案例,總結網絡故障的診斷和測試的方法和技巧。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50