基于LMS 的多模型高機動目標跟蹤方法
2021-01-22 09:17:06彭志剛李寶鵬李大龍
火力與指揮控制 2020年12期
關鍵詞:模型
彭志剛,李寶鵬,李大龍
(海軍航空大學青島校區,山東 青島 266041)
0 引言
隨著現代航空技術的迅速發展,各種飛行器的機動性和運動速度越來越高,可靠而精確的跟蹤目標始終是目標跟蹤系統設計的主要目的與難點。目標跟蹤實際上就是對目標狀態的跟蹤濾波問題,而實現目標跟蹤首先要使所建立的目標運動模型與實際的目標運動模型匹配。
在當前目標機動能力日益增強,目標的運動模式的結構、參數變化起伏很大的情況下,單模型算法很難滿足跟蹤速度和精度的需求[1-3],而多模型算法可以避免采用單模型時,由于目標機動而造成模型的不準確,提高機動目標跟蹤性能,從而實現對強機動目標的精確跟蹤[4]。交互式多模型(IMM)算法是利用模型先驗概率和模型轉移概率來計算每一個模型交互的權值[5-6],然而,模型轉移概率是人為事先確定的,它在一定程度上引入了人為誤差,影響了濾波器的跟蹤性能,而且,由于其對每一個模型都需要進行跟蹤濾波,計算量隨模型的增加而大大增加,不利于實時計算[7-8]。
本文提出了一種基于殘差反饋的多模型最優跟蹤濾波算法。該算法采用多個模型交互來逼近目標的實際運動模型,通過引入殘差反饋信息,根據最小均方算法(LMS)求出各個模型交互的最優權,提高模型預測的準確性,從而提高目標的跟蹤性能。該方法在避免了常規方法中單一模型難以準確描述高機動目標運動,在保持IMM 算法優點的同時,還避免了IMM 算法中人為設置參數和計算量大的問題,能夠有效提高目標狀態估計的準確性,從而提高目標的跟蹤性能。
1 基本LMS 算法原理
LMS 算法因其結構簡單、計算量小、穩定性好的特點,被廣泛用于雷達、聲納、系統識別、信號處理及自適應預測等領域。
LMS 算法的基本原理框圖如圖1 所示。其中x(n)為輸入信號,y(n)為自適應濾波器對當前輸入信號的估計,d(n)為期望信號,e(n)為估計信號和期望信號之間的估計誤差。LMS 算法通過e(n)調整濾波器的權值,使得估計信號y(n)逼近期望信號d(n),以達到最小均方誤差。
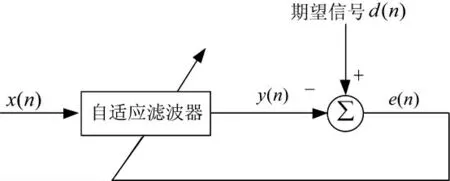
圖1 LMS 算法的基本原理框圖
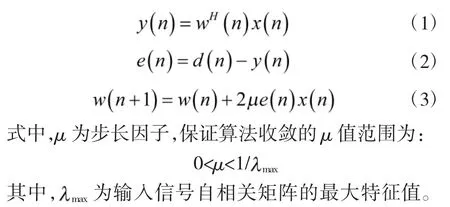
基于最速下降法的LMS 算法迭代公式為:
2 基于LMS 最優預測模型原理
基于LMS 最優預測模型原理框圖如圖2 所示。其中,X(k)為k 時刻目標的狀態,X^(k+1|k)為k 時刻預測目標k+1 時刻的狀態預測值,Z^(k+1)為k+1時刻目標量測預測值,Z(k+1)為k+1 時刻目標狀態的觀測值。要想預測的準確,就要k+1 時刻目標量測的預測值逼近觀測值,即殘差Z^(k+1)最小。由LMS 原理可知,當預測模型中的權值由LMS 確定時,此時目標狀態的預測值最逼近觀測值,可以達到最小均方誤差,因此,稱為最優預測模型。
同IMM 算法一樣,選擇多個模型例如選擇勻加速模型、Singer 模型和“當前”統計模型等常見模型來完成對目標的LMS 最優預測。目標的狀態向量為:
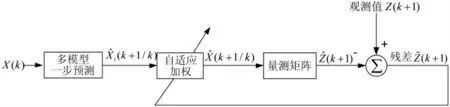
圖2 基于LMS 最優預測模型的原理框圖

其中,x(k)、x˙(k)和x··(k)分別表示為k 時刻目標位置、速度和加速度。例如勻加速模型的狀態轉移矩陣為:
其中,T 為采樣周期,基于勻加速模型的一步預測為:

利用權值對得到的各個目標運動模型的一步預測值和協方差矩陣進行加權求和,得到基于LMS算法的狀態估計向量和估計協方差矩陣:
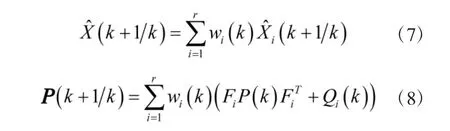
式中,r 為采用的目標運動模型的個數,wi(k)為k 時刻第i 個運動模型的權值。可以看出,目標狀態的一步預測由勻加速模型、Singer 模型和“當前”統計模型等r 個模型的一步預測加權而得到,而權值由LMS 原理求出,這樣就保證了目標量測的預測值與觀測值殘差最小,即保證了預測的準確性。
以目標機動運動為例,給出基于殘差反饋的多模型最優跟蹤濾波算法步驟如下:
量測的預測:

從上面的算法可以看出,本文利用LMS 原理,對多個模型的預測結果進行最優加權,通過基于最優預測結果的單模型濾波替代多模型的同時濾波,計算量也大大較少。本文所提算法的具體實現框圖如圖3 所示。
3 仿真分析
仿真1:假設目標的起始位置為[10 25 15]km,起始速度為[0.4 0.3 0.2]km/s,X 方向的加速度為0.15 sin(0.04πt)km/s2,Y 方向的加速度為0.1cos(0.04πt)km/s2,Z 方向的加速度為0.12sin(0.022 πt)km/s2。距離誤差的標準差為△r=0.075 km,方位角誤差的標準差為△θ=0.2°,仰角測量誤差的標準差為△φ=0.2°。對目標進行30 s 的觀測,采樣間隔T為0.05。
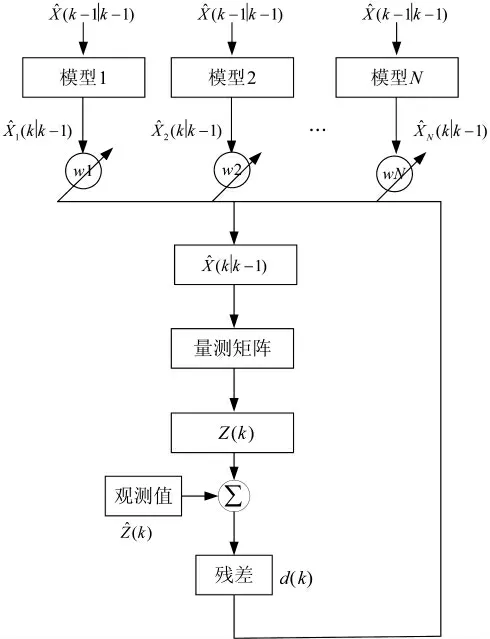
圖3 所提算法實現框圖
選擇的運動模型是Singer 模型、“當前”統計模型和勻加速CA 模型。IMM 與LMS 算法的初始模型權值相同,都為W(0)=[1/3 1/3 1/3],傳統IMM 算法中的概率轉移矩陣P 為:

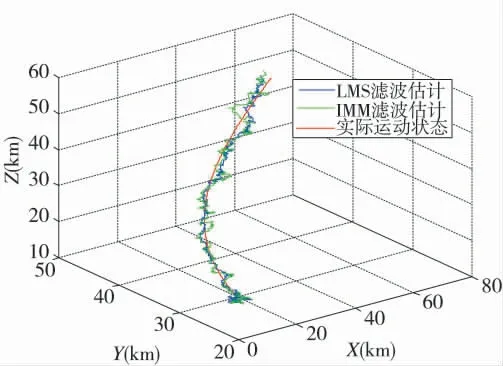
圖4 跟蹤軌跡圖
圖4 為三坐標跟蹤軌跡圖,可看出通過LMS 多模型跟蹤方法比IMM 方法求得的跟蹤軌跡更接近真實軌跡。下頁圖5 為目標三坐標方向跟蹤誤差圖,可看出所提算法跟蹤結果在X、Y、Z 3 個方向上都比傳統IMM 方法跟蹤結果誤差小。
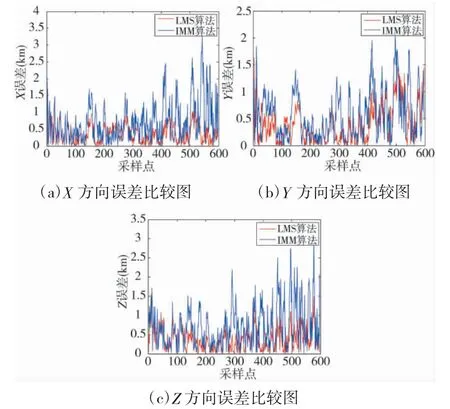
圖5 跟蹤軌跡誤差圖
仿真2:考慮到LMS 是否具有更高的普適性,研究跳躍式高超聲速飛行器(高超目標)的機動跟蹤情況。對雷達觀測的一段飛行軌跡進行跟蹤。采樣間隔為0.5 s。其他參數設置與仿真1 相同。
圖6 為跳躍式高超聲速飛行器軌跡,圖7 是圖6 在高機動段的局部放大圖,可以看出目標在第140~270 采樣點處于大機動狀態。圖8 為兩種算法跟蹤高超目標軌跡圖,可看出通過LMS 多模型跟蹤方法比IMM 方法求得的跟蹤軌跡更接近真實軌跡。
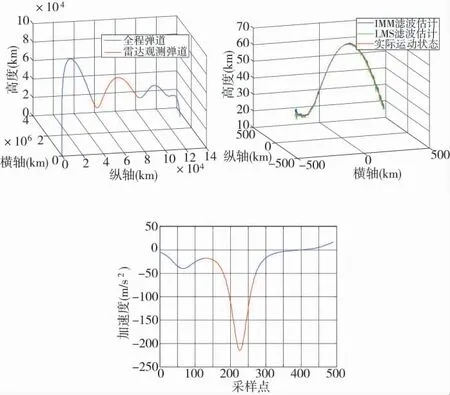
圖6 大地坐標系高超軌跡圖
圖7 雷達坐標系高超目標加速度
圖8 雷達坐標系高超LMS 算法跟蹤圖
圖9 為3 個坐標方向高超目標跟蹤誤差圖,可以看出所提方法跟蹤結果在3 個坐標上整體比傳統IMM 方法跟蹤效果好一些,LMS 多模型跟蹤結果比傳統IMM 方法跟蹤結果誤差在目標大機動時具有更高的跟蹤精度。
可見,所提方法對高速機動目標具有更好的跟蹤性能,且所提方法僅僅經過一次濾波處理,在運算量上也更有優勢。
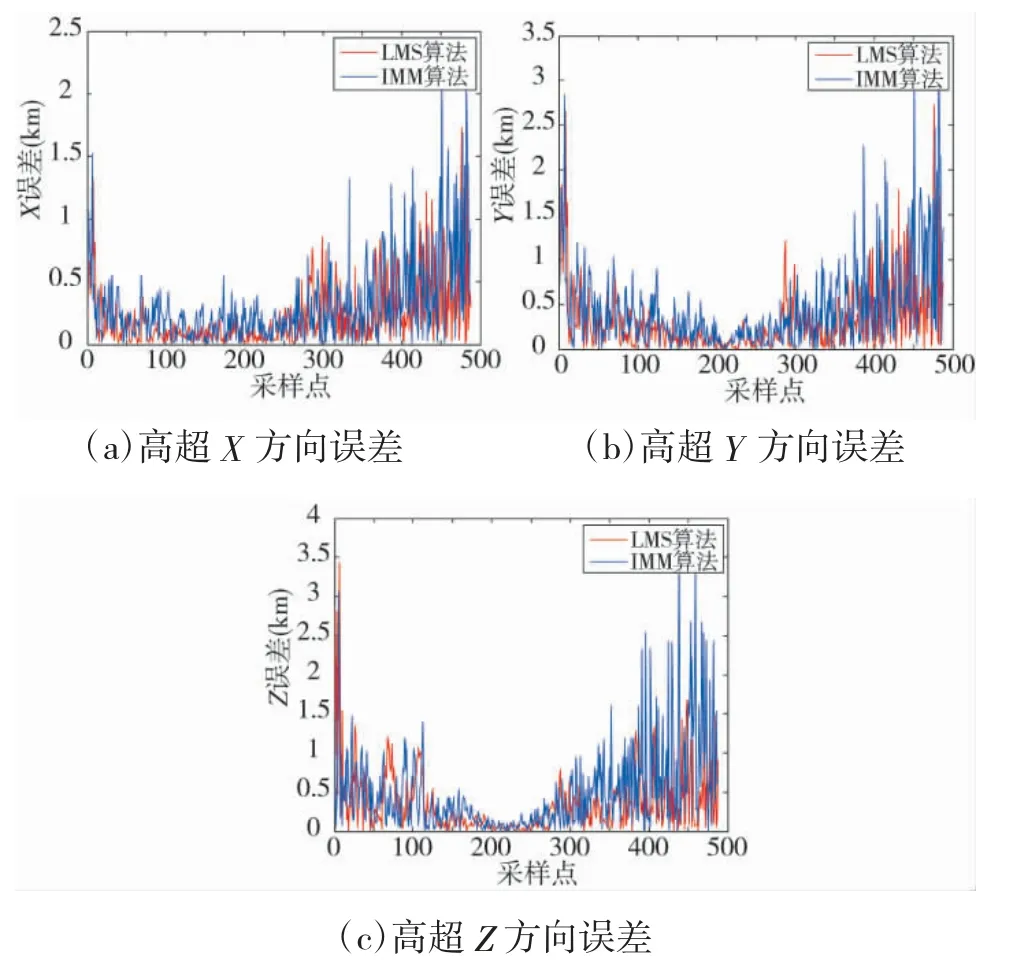
圖9 高超目標跟蹤誤差
4 結論
本文利用LMS 原理,對多個模型的預測結果進行最優加權,使得模型預測更加準確,提高了狀態估計的準確性,從而提高了目標的跟蹤性能。由于依然采用多模型交互來逼近高機動目標的運動模型的思想,保持了IMM 算法的優點,而且所提方法是一個帶反饋的系統,能夠利用前幾個時刻的信息對當前時刻給出最優估計。在濾波算法上,通過基于最優預測結果的單模型濾波替代多模型的同時濾波,計算量也大大減少,也避免了IMM 算法中由于多模型帶來的模型“競爭”和“冗余”問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19