基于STM32的無人機(jī)動力電池充電器設(shè)計(jì)
2021-01-25 08:03:50吳曉春
通信電源技術(shù) 2020年18期
關(guān)鍵詞:設(shè)計(jì)
萬 能,張 陽,吳曉春
(國網(wǎng)安徽省電力有限公司 檢修分公司,安徽 合肥 230601)
0 引 言
無人機(jī)動力電池充電器作為無人機(jī)動力電池中的主要部件,能夠提供無人機(jī)動力電池的工作電量。基于無人機(jī)動力電池所需電量大的特點(diǎn),對無人機(jī)動力電池充電器的功率提出了很高的要求[1]。在我國,針對無人機(jī)動力電池充電器的設(shè)計(jì)中,主要包括功率板、三相正弦電路以及內(nèi)核程序3部分。傳統(tǒng)的無人機(jī)動力電池充電器在實(shí)際應(yīng)用過程中往往存在自放電率高和能量密度低的問題,在為無人機(jī)動力電池充電時(shí)充電效率低,無法保證無人機(jī)動力電池的續(xù)航能力。因此,優(yōu)化設(shè)計(jì)無人機(jī)動力電池充電器是勢在必行的。結(jié)合對無人機(jī)動力電池充電器的發(fā)展趨勢分析,無人機(jī)動力電池充電器設(shè)計(jì)越來越趨于數(shù)字化、智能化、集成化以及網(wǎng)絡(luò)化。而STM32的出現(xiàn)為無人機(jī)動力電池充電器的優(yōu)化設(shè)計(jì)提供了新思路。STM32指的是一種單片機(jī)型號,具備低能耗和高性能的特點(diǎn)。基于此,本文提出基于STM32的無人機(jī)動力電池充電器設(shè)計(jì),通過將STM32應(yīng)用在無人機(jī)動力電池充電器設(shè)計(jì)中,致力于降低無人機(jī)動力電池充電器的自放電率,設(shè)計(jì)出滿足發(fā)展趨勢的新型無人機(jī)動力電池充電器。
1 STM32概述
STM32指的是一種單片機(jī)型號,內(nèi)含嵌入式M7內(nèi)核,具備低能耗和高性能的特點(diǎn)。STM32能夠通過標(biāo)準(zhǔn)化背板與系統(tǒng)結(jié)構(gòu)的快速集成,合理預(yù)計(jì)板級模塊之間的互相操作性,更容易實(shí)現(xiàn)模塊升級[1]。利用STM32最大集成度的框架結(jié)構(gòu)優(yōu)勢,可以使各設(shè)備更適應(yīng)惡劣的環(huán)境,并且利用更高性能的接口技術(shù),可以進(jìn)一步快速轉(zhuǎn)換和傳輸數(shù)據(jù)參數(shù),降低連接系統(tǒng)的功耗,支持功能更加強(qiáng)大的處理器連接[2]。STM32以其LQFP100設(shè)計(jì)理念,能夠在保證最小硬件變化的前提下滿足其功能需求。
2 基于STM32的無人機(jī)動力電池充電器設(shè)計(jì)
2.1 設(shè)計(jì)功率變換電路
在無人機(jī)動力電池充電器設(shè)計(jì)中,首先設(shè)計(jì)功率變換電路。該電路作為無人機(jī)動力電池充電器中的核心電路具備四開關(guān)Buck—Boost,能夠幫助無人機(jī)動力電池充電器實(shí)現(xiàn)Buck功能。無人機(jī)動力電池充電器中的功率變換電路原理如圖1所示。
結(jié)合圖1所示,本文設(shè)計(jì)的功率變換電路能夠通過1N4148W-7-F施加自舉電容,保證U16關(guān)閉時(shí),U17導(dǎo)通,此時(shí)利用IRF3205Z自舉電容充電,在U18、U19同時(shí)互補(bǔ)導(dǎo)通時(shí),為Buck—Boost提供通路。通過采用均衡保護(hù)的方式,在無人機(jī)動力電池充滿電時(shí)能夠自動斷開U19[3]。在明確功率變換電路原理的基礎(chǔ)上,為提高無人機(jī)動力電池充電器中功率變換電路的電流有效值,可通過計(jì)算電感最小值的方式將功率變換電路功率最大化。設(shè)功率變換電路中電感最小值的表達(dá)式為Lmin,則有公式如下:
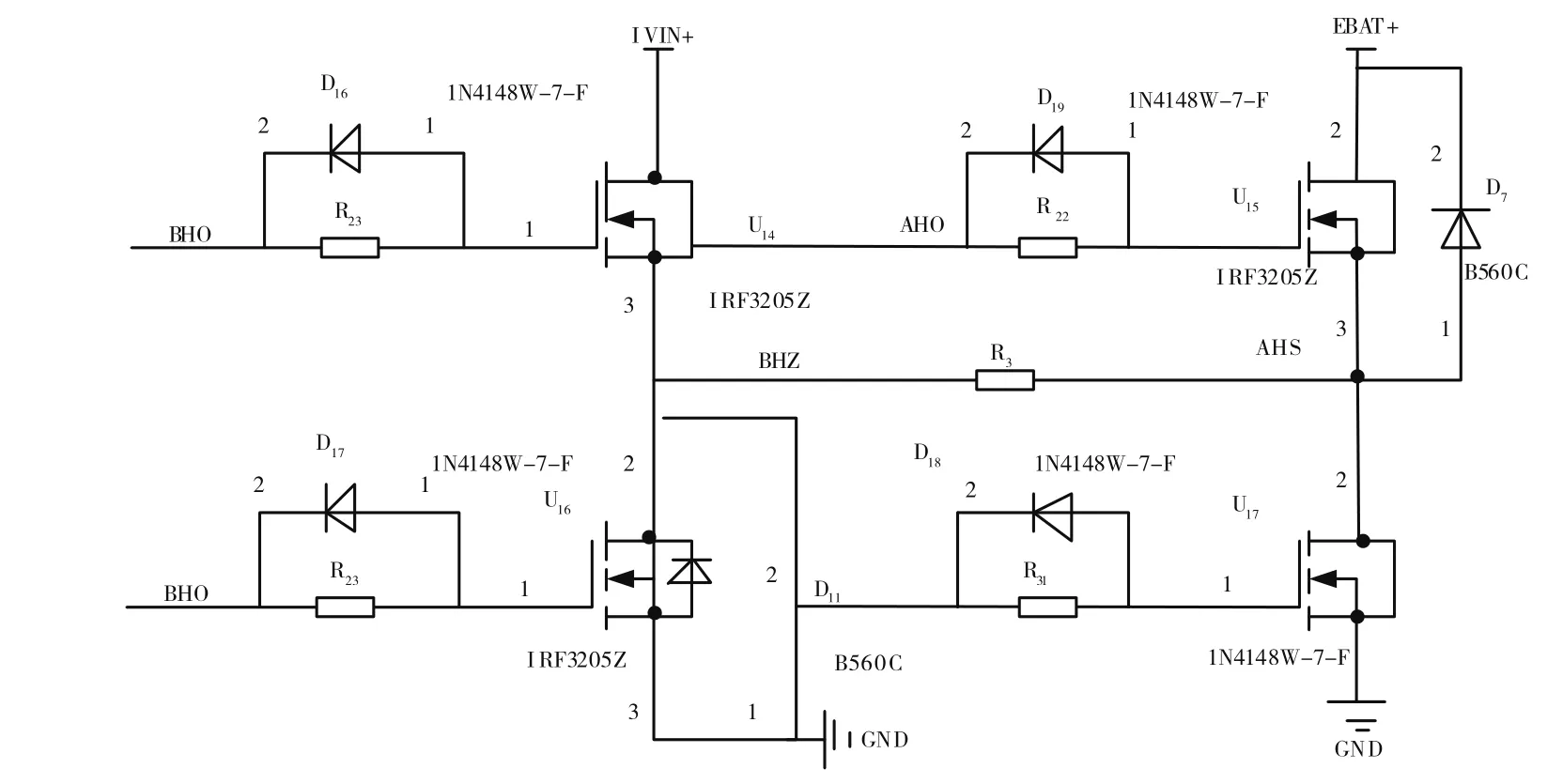
圖1 功率變換電路原理圖

式中,Iout表示功率變換電路運(yùn)行過程中產(chǎn)生的紋波電流;Cin指的是自舉電容施加偏壓最大值;R指的是功率變換電路中的電阻值;c指的是功率變換電路中1N4148W-7-F的電容;fout指的是功率變換電路運(yùn)行過程中的截止頻率;K指的是一階無源低通電路輸出電量。
通過式(1)計(jì)算得出功率變換電路中的電感最小值,確定功率變換電路的基本參數(shù),而后還需要計(jì)算功率變換電路中的電感電流峰值。設(shè)電感電流峰值的表達(dá)式為Ipeak,則有公式:

式中,Iripple指的是功率變 換電路輸出額定電流。
通過式(2)得出電感電流峰值,當(dāng)Ipeak數(shù)值在5.0~6.5 A,則設(shè)定功率變換電路的工作電壓為20 V;當(dāng)Ipeak數(shù)值在6.5~8.0 A,則設(shè)定功率變換電路的工作電壓為30 V[4]。最后,以此作為功率變換電路額定參數(shù),完成無人機(jī)動力電池充電器中功率變換電路的設(shè)計(jì)。
2.2 設(shè)計(jì)電壓檢測電路
在設(shè)計(jì)功率變換電路的基礎(chǔ)上,還需要設(shè)計(jì)電壓檢測電路,主要用于檢測無人機(jī)動力電池充電器中的輸入電壓以及電池電壓。本次設(shè)計(jì)電壓檢測電路采用等比例縮放的方式,通過在功率變換電路中設(shè)置4個(gè)20 mΩ的電阻,檢測流經(jīng)電流。本文將其電阻的取值設(shè)定為2~150 kΩ[5]。將電阻的搜索空間定義為在2~124.6 kΩ,步長設(shè)置為0.2 kΩ。電容選擇損耗較小的優(yōu)質(zhì)電容,將電容的取值設(shè)定在大于15 pF,根據(jù)無人機(jī)動力電池充電器的截止頻率公式對截止頻率進(jìn)行計(jì)算:

式中,R和R'指的是電壓檢測電 路中的4個(gè)阻值;C指的是電壓檢測電路電容。
隨著生豬養(yǎng)殖事業(yè)向集約化、規(guī)模化的方向發(fā)展,對飼養(yǎng)管理人員提出了更高的要求,養(yǎng)豬戶不僅要掌握生豬生產(chǎn)動態(tài),還需要全面提升科學(xué)飼養(yǎng)管理水平,最大程度地減少市場風(fēng)險(xiǎn)。地區(qū)各級政府部門需要強(qiáng)化養(yǎng)豬戶的培訓(xùn),確保自產(chǎn)自銷養(yǎng)殖戶能掌握飼養(yǎng)管理技術(shù),逐步增強(qiáng)自身的防疫意識,全面提升養(yǎng)殖人員的綜合素質(zhì)與專業(yè)技能。確保自產(chǎn)自銷養(yǎng)殖戶精準(zhǔn)掌握市場經(jīng)濟(jì)脈搏,全面提升自身的養(yǎng)豬技能水平。政府部門可每月制定1次養(yǎng)殖人員培訓(xùn),促使養(yǎng)殖人員的專業(yè)技能與綜合素質(zhì)得到全面提升,確保生豬自產(chǎn)自銷防疫工作開展的有序性,全面提升生豬養(yǎng)殖經(jīng)濟(jì)效益[4]。
根據(jù)式(3)得出,本文選用的一階無源電壓檢測電路的截止頻率為150 kHz左右。因此,能夠估算得出電容的取值范圍應(yīng)在15~1024 pF,其步長為15 pF。本文采用將多個(gè)子目標(biāo)以加權(quán)和的形式展現(xiàn),從而將多目標(biāo)問題轉(zhuǎn)換為單目標(biāo)問題。設(shè)無人機(jī)動力電池充電器的自適應(yīng)函數(shù)為x,則有公式:

式中,s指的是自變量;e指的是采樣頻率;p指的是常數(shù),通常情況下為1,主要目的是為防止自適應(yīng)函數(shù)的分母為0。
通過式(2),在理想無人機(jī)動力電池充電器的條件下,其最大數(shù)值為30 000,以此為無人機(jī)動力電池充電器中電壓檢測電路的性能指標(biāo)。
2.3 采用STM32高速集成充電指令處理
在完成無人機(jī)動力電池充電器中電路部分設(shè)計(jì)后, 利用STM32強(qiáng)大的數(shù)據(jù)處理功能,將ARM Cortex-M內(nèi)核單片機(jī)采集到的數(shù)據(jù)經(jīng)過STM32執(zhí)行快速且復(fù)雜的處理,再由USB接口傳輸?shù)缴衔粰C(jī)中進(jìn)行后續(xù)的處理,進(jìn)而讀取無人機(jī)動力電池充電器充電參數(shù)[6,7]。圖2為采用STM32高速集成充電指令處理結(jié)構(gòu)示意圖。

圖2 采用STM32高速集成充電指令處理結(jié)構(gòu)示意圖
根據(jù)圖2可知,基于STM32的高速集成充電指令 處理需要完成對32個(gè)通道的中頻信號采樣、數(shù)字波束預(yù)合成、合成以及數(shù)據(jù)記錄等功能。主控制模板用于完成處理數(shù)據(jù)的初始化、交換網(wǎng)絡(luò)動態(tài)管理以及對外接口等功能,獲得幀記錄數(shù)據(jù)。由ARM Cortex-M 32位微控制器完成32通道的數(shù)據(jù)傳輸模擬信號的采樣和數(shù)據(jù)的預(yù)處理[3]。處理模塊為3個(gè),利用處理模塊上的各個(gè)算法實(shí)現(xiàn)對兩個(gè)通道中32路信號的預(yù)合成,并完成對數(shù)據(jù)的校正,將數(shù)據(jù)跳轉(zhuǎn)到0。模塊與模塊之間的數(shù)據(jù)通信采用串行總線,本文選用RapidIO 2.2規(guī)范,設(shè)置單通道的速率為8.25 Gb/s,記錄無人機(jī)動力電池充電器充電參數(shù)。
2.4 實(shí)現(xiàn)無人機(jī)動力電池充電器充電
以STM32高速集成充電指令處理后的充電參數(shù)為 依據(jù),采用電池探測算法,確定無人機(jī)動力電池電壓預(yù)充門限[8,9]。本文針對無人機(jī)動力電池充電器充電運(yùn)行特點(diǎn),通過建立隸屬度函數(shù),計(jì)算無人機(jī)動力電池電壓預(yù)充門限。設(shè)無人機(jī)動力電池電壓預(yù)充門限為z,可得公式:
通過式(5),得出無人機(jī)動力電池電壓預(yù)充門限。在保證無人機(jī)動力電池充電器充電電壓在預(yù)充門限范圍內(nèi),執(zhí)行無人機(jī)動力電池充電器充電,此過程需要定時(shí)預(yù)充電[10]。設(shè)預(yù)充電定時(shí)的目標(biāo)函數(shù)為n,則有公式:

式中,i指的是無人機(jī)動力電池充電器給定轉(zhuǎn)速;e指的是無人機(jī)動力電 池充電器額定功率。
通過式(6),得出預(yù)充電定時(shí)時(shí)間。設(shè)定預(yù)充電定時(shí),當(dāng)定時(shí)時(shí)間到時(shí)自動停止無人機(jī)動力電池充電器充電,保證無人機(jī)動力電池充電器充電自放電率達(dá)到最小,以此實(shí)現(xiàn)無人機(jī)動力電池充電器充電,完成基于STM32的無人機(jī)動力電池充電器設(shè)計(jì)。
3 實(shí)例分析
3.1 實(shí)驗(yàn)準(zhǔn)備
本次實(shí)例分析,采用硬件設(shè)施為型號為TYR3583589的上位機(jī),實(shí)驗(yàn) 環(huán)境包括:虛擬主機(jī)資源數(shù)量為500;物理主機(jī)地理距離為30;主機(jī)更新常量為0.1;網(wǎng)絡(luò)權(quán)重系數(shù)為0.2。本次實(shí)例分析中設(shè)置的實(shí)驗(yàn)測試指標(biāo)為無人機(jī)動力電池充電器的自放電率,自放電率越高證明無人機(jī)動力電池充電器的荷電保持能力越差。基于STM32設(shè)計(jì)無人機(jī)動力電池充電器,通過USBPACK 2.0軟件測試無人機(jī)動力電池充電器的自放電率,記錄實(shí)驗(yàn)結(jié)果,設(shè)置為實(shí)驗(yàn)組,再采用傳統(tǒng)方法設(shè)計(jì)無人機(jī)動力電池充電器,同樣通過USBPACK 2.0軟件測試無人機(jī)動力電池充電器的自放電率,記錄實(shí)驗(yàn)結(jié)果,設(shè)置為對照組。
3.2 實(shí)驗(yàn)結(jié)果與分析
整理實(shí)驗(yàn)數(shù)據(jù),如圖3所示。

圖3 自放電率對比圖
通過圖3可知, 本文設(shè)計(jì)的無人機(jī)動力電池充電器自放電率明顯低于對照組,荷 電保持能力更強(qiáng),具有現(xiàn)實(shí)應(yīng)用價(jià)值。
4 結(jié) 論
通過基于STM32的無人機(jī)動力電池充電器設(shè)計(jì)研究,取得了一定的研 究成果,解決傳統(tǒng)無人機(jī)動力電池充電器中存在的不足具有現(xiàn)實(shí)意義,能夠指導(dǎo)無人機(jī)動力電池充電器的優(yōu)化。在后期的發(fā)展中,應(yīng)加大本文設(shè)計(jì)無人機(jī)動力電池充電器在無人機(jī)動力電池充電中的應(yīng)用力度。但由于目前國內(nèi)外針對基于STM32的無人機(jī)動力電池充電器設(shè)計(jì)研究仍存在一些問題,因此在日后還需要進(jìn)一步深入研究無人機(jī)動力電池充電器的優(yōu)化設(shè)計(jì),從而提高無人機(jī)動力電池充電器的綜合性能。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
