自適應多啟發蟻群算法的無人機路徑規劃
2021-01-26 05:50:48尹雅楠甄然武曉晶張春悅吳學禮
河北科技大學學報 2021年1期
關鍵詞:規劃
尹雅楠 甄然 武曉晶 張春悅 吳學禮


摘 要:為了解決蟻群算法在無人機實現路徑規劃中容易陷入局部最優的問題,提出改進的蟻群算法。對信息素的揮發因子以及信息素進行上、下限設置,防止由于較短路徑上的信息素過高以及較長路徑上的信息素過低,使螞蟻陷入局部最優,同時在多啟發因素的影響下,將路徑的整體長度作為決定狀態轉移概率的一個自適應啟發函數因子,當路徑長度很大時,自適應啟發函數因子較小,使得蟻群選擇該路徑的概率減小。實驗結果表明,改進的算法在路徑長度上減少了6.4%,最優路徑長度方差降低了85.78%,增加了對環境整體性的考慮,縮短了路徑長度,降低了迭代次數,跳出局部最優。在環境復雜度加大的情況下,引入自適應啟發函數因子之后的算法可以有效地選擇較好的路徑,為無人機路徑規劃提供了理論依據。
關鍵詞:航空、航天科學技術基礎學科其他學科;無人機;蟻群算法;路徑規劃;啟發因素
中圖分類號:TP301.6;V279?文獻標識碼:A
文章編號:1008-1542(2021)01-0038-10
隨著現代科技的發展,無人機可執行的任務逐漸增多,例如無人機可以承擔起運輸醫療救援包等應急物資的任務[1]。為了使無人機能夠更好地在實際中應用,學者對無人機的路徑規劃進行了大量的研究,提出了很多算法來提高路徑規劃的效率,目前有人工勢場法[2]、A*算法[3]、蟻群算法[4]、遺傳算法[5]、粒子群算法[6]、蝙蝠算法[7]、模擬退火法[8]、快速擴展隨機樹算法[9]、D*算法[10]、人工魚群算法[11]、蝗蟲算法[12]以及螢火蟲算法[13]等。遺傳算法是用編碼來表示問題的解,在編碼進行選擇、交叉、變異等操作之后,將適應度函數的值作為進化的評價依據,最后得到最優的種群,也就是問題的解[14]。蟻群算法與遺傳算法在選擇最優解時,操作相似。蟻群算法也是通過迭代尋找最優解,但是蟻群算法在選擇最優解時沒有交叉和變異這2個操作,所以求解更簡單。
蟻群算法是一種基于啟發的搜索算法,是由DORIGO等于20世紀90年代初通過模擬螞蟻群在環境中的覓食行為而提出的算法[15]。蟻群算法具有正反饋、并行計算、魯棒性好等特點[16],許多學者在研究路徑規劃方面的問題時,將蟻群算法應用其中,并且得到了較好的結果。蟻群算法搜索范圍廣,有較快的收斂速度,可以應用在離散優化的問題上[17],但是由于該算法具有正反饋特性,可能會造成局部路徑上的信息素堆積,從而存在陷入局部最優等問題[18-19]。蟻群算法通過將當前位置與下一位置之間的距離作為啟發信息,當遇到障礙物時,在提前躲避障礙物方面還存在一些問題[16]。對于蟻群算法的不足,許多學者對算法本身的不足進行改進。隨著研究的不斷深入,結合路徑規劃的特性,學者將如何提高算法的搜索效率作為研究的重點[20]。
路徑平滑能夠降低無人機的飛行風險,HUANG等[21]引入K度平滑方法,生成光滑的路徑。TAO等[22]因當前節點與多個相鄰節點的距離完全相等,導致在選擇下一個節點時啟發不能發揮重要作用,于是提出將起始點與目標點之間的最短距離作為路徑搜索的引導,通過計算當前節點和下一個待走節點的距離和下一個待走節點到最短路徑的垂直距離的加權和的倒數,加快了算法的搜索。孫功武等[23]設計了一種自適應啟發函數,該啟發函數引入了當前柵格與待走柵格的距離以及待走柵格到目標柵格的距離選擇較好的節點,但是該自適應啟發函數只考慮當前柵格以及待走柵格到目標柵格的距離。黃心等[24]根據多尺度路徑搜索的思路,提出了改進后的引導因子,該引導因子考慮了節點到目標點的距離以及節點到起始點的距離,同時通過地形的高度決定無人機的飛行,但只局部考慮了啟發函數的引導作用。李理等[25]在路徑平滑問題上,將轉彎次數引入啟發函數中,對改進的啟發函數進行影響,同時對信息素的更新方式也進行了改進,路徑平滑性得到較大提高,收斂性和全局搜索能力都較好,但是轉移概率只受信息素和啟發函數的影響,迭代次數較大,容易陷入局部最優。
文獻[21]在對路徑平滑問題上引入K度平滑方法,而文獻[25]不僅將平滑問題考慮到啟發函數中,還將路徑的轉彎次數考慮到啟發函數中;文獻[22]對轉移概率進行了改進,保證了算法的收斂速度,以提高算法的性能,但是所得到的路徑長度不是最短的;文獻[23]根據當前柵格與目標柵格的距離設計了自適應啟發函數,但是只考慮了路徑長度這一因素,文獻[25]的啟發函數考慮了多個啟發因素;文獻[24]將節點的引導因子引入到轉移概率中進行改進,但是沒有對啟發因素進行改進。文獻[25]在使路徑盡可能短的同時,對路徑的轉彎次數以及路徑平緩性進行考慮,進而提出了將距離修正函數、安全性函數以及平滑性函數這3種因素考慮到啟發函數中的多啟發因素蟻群算法。在螞蟻尋找最優路徑時,以多啟發因素為基礎選擇路徑。
但是文獻[25]中的路徑因素只考慮了當前柵格的各個鄰接柵格到目標柵格的距離,沒有從路徑的整體性考慮。本文在多啟發因素的作用下,從路徑的整體性考慮,將文獻[24]的引導因子引入轉移概率中,并對啟發函數、信息素和信息素揮發因子進行處理,增加算法的準確性。仿真結果表明,該方法提高了路徑搜索效率,降低了迭代次數,路徑長度得到改善。
1?環境建模
本文采用二維柵格法[26]對路徑環境建模。考慮到無人機的安全問題,將無人機路徑與柵格障礙物之間的距離定為柵格長度的一半。每個柵格有8個鄰接柵格[27]可以走,如圖1所示。dis(i,j)表示當前柵格i到其第j個鄰接柵格的距離。
螞蟻選擇下一柵格的流程如下。
2?多啟發因素
文獻[25]基于路徑規劃需要路徑長度短、轉彎的次數不宜過多、路徑盡量平緩以及適應環境性等問題,提出將距離修正函數、安全性函數以及平滑性函數這3種因素考慮到啟發函數中。距離修正函數使當前柵格的各個鄰接柵格到目標柵格的距離差值增大,在選擇下一個待走柵格時,增加路徑長度對螞蟻的啟發。安全性函數對無人機飛行中的轉彎有一定的引導作用,當無人機當前的方向與上一時刻的方向相同時,該方向的安全性函數值就較大。平滑性函數會給無人機選擇平緩路徑的啟發。
2.1?距離修正函數
2.2?安全性函數
在無人機飛行過程中,如果規劃的路徑轉彎次數較多,不僅使無人機飛行的路徑距離增加,還會增加無人機飛行的危險程度。盡可能地減少無人機的轉彎次數,對路徑規劃來說是有必要的。
式中:j∈allowedi;rij(t)為安全性函數;u為啟發常數;θ表示安全性的重要程度;visitedi為第t次迭代過程中,第k只螞蟻走到當前第i號柵格時所走過的柵格號的集合;v為當前第i號柵格的上一個柵格的標號,v=visitedi(end-1);J(allowedi)表示當前柵格的可行鄰接柵格的數量;drvi(t)表示在第t次迭代時,從第v號到第i號柵格的方向轉向;drij(t)表示在第t次迭代時,從第i號到第j號柵格的方向轉向。通過drvi(t)和drij(t)的比較,如果兩者相同,則會增大下一步沿同一個方向走的可能性,從而使路線能夠較好地保持直線。
2.3?平滑性函數
式中:hmax為當前第i個柵格的高度與其鄰接柵格的高度之差的最大值;hmin為當前第i個柵格的高度與其鄰接柵格的高度之差的最小值;h(i)為柵格高度。
3?改進的蟻群算法
本文讓蟻群在構建的柵格圖中根據信息素、啟發函數以及轉移概率,從當前柵格的8個相鄰柵格中選擇下一個要走的柵格,尋找一條從起始點到目的點最近的路徑。在蟻群開始尋找路徑之前每柵格的信息素是相同的,螞蟻通過轉移概率選擇下一個待走柵格行走,走過的路徑會留下信息素,沒有走過的路徑的信息素會在迭代中不斷減少。同時間內,較短路徑上的螞蟻很快就找到食物,而較長路徑上的螞蟻找到食物較慢。因此,較短路徑上螞蟻留下的信息素總和較多,從而吸引更多的螞蟻來走這條路徑,也就找到了最短路徑。
3.1?轉移概率
蟻群算法的轉移概率受啟發函數和螞蟻留下的信息素這2個因素影響。在實際環境中有障礙物存在,多啟發函數可以使螞蟻對障礙物進行躲避、選擇較短的路徑以及減少轉彎次數等。存在較多信息素的路徑會引導許多螞蟻選擇該路徑,當過多的螞蟻從同一條路徑行走時,在螞蟻沒有找到最優路徑的情況下,認為當前路徑為全局最優,從而使螞蟻陷入局部最優。
3.1.1?自適應啟發函數因子
為了能夠提高螞蟻搜索路徑的效率,跳出局部最優,本文在轉移概率中引入了自適應啟發函數因子,見式(5)。自適應啟發函數因子是待走柵格到起始柵格的距離與待走柵格到目的柵格的距離和的加權倒數。在待走柵格與目標柵格距離的基礎上,再加上待走柵格到起始柵格的距離,即在考慮該待走柵格是否為最佳待走柵格時,將自適應啟發函數因子作為轉移概率的影響因素之一,增加對環境的整體性考慮。
式中:μij為自適應啟發函數因子;dAj為起始點與待走柵格的距離;A為起始點;j為待走柵格標號;djE為待走柵格與目的點的距離;E為目的點;a,b為權重系數。待走柵格與起始點以及待走柵格與目的點的距離越小,自適應啟發函數因子越大,轉移概率相應地越大,從而能較好地選擇較短的路徑。
通過對轉移概率引入自適應啟發函數因子,使得螞蟻盡可能地選擇最短路徑,加快搜索路徑的效率。
3.1.2?改進的轉移概率
改進后的轉移概率:
式中:k為螞蟻的標號;i為當前柵格號;j為將要走的下一個柵格號;t為當前的迭代次數;τ為信息素強度;η為啟發函數;α為信息素重要程度因子;β為啟發因子;allowedk為螞蟻k下一步可以選擇的柵格。后面的螞蟻會根據前面螞蟻留下的信息素來其行走進行引導,路徑越短,螞蟻留下的信息素越多,信息素同時也會蒸發,信息素的更新方式如下:
3.2?啟發函數
在啟發函數中加入當前柵格到其鄰接柵格的歐式距離,作為影響啟發函數因素之一。通過距離修正函數,在當前柵格的鄰接柵格中選一個距離目標柵格最近的鄰接柵格。當前柵格到其鄰接柵格的距離不完全相同,為了能夠更加準確地考慮路徑長度對蟻群選擇下一柵格的影響,在啟發函數中加入當前柵格到其鄰接柵格的歐式距離d(i,j)。當d(i,j)距離較大時,[SX(]1d(i,j)[SX)]的值則會減小,使得多啟發函數值ηij(t)減小,進而影響轉移概率的值,構成了一個閉環反饋。啟發函數見式(12)。
4?算法仿真
4.1?算法流程
步驟1:對柵格地圖進行構建,設置起始點A和目的點E的坐標。
步驟2:初始化參數,將所有螞蟻放在起始點上,構建禁忌表。
步驟3:根據式(12)計算啟發函數以及根據式(6)計算轉移概率來確定螞蟻下一個要走的柵格,將走過的柵格號放禁忌表中。當螞蟻到達目的點時,即完成一次搜索,記錄本次迭代的最優路徑。
步驟4:根據式(9)對信息素進行更新。
步驟5:對各次迭代的最優路徑進行比較,確定目前最優路徑。
步驟6:判斷迭代次數是否達到最大,若達到最大,則輸出結果,否則繼續進行迭代。
根據以上步驟的描述,給出部分改進蟻群算法的偽代碼如下:
算法流程圖見圖4。
4.2?參數設定
為了能夠更好地進行數據對比,本文參數的選取是在對比算法所采用參數的基礎上進行的更改,并根據經驗不斷地運行調試,找到合適的數值。初始化參數見表1。
4.3?仿真比較
為了提高轉移概率的可靠性,本文對轉移概率進行了改善,引入了自適應啟發函數因子,并將當前柵格到其鄰接柵格的歐式距離作為啟發函數的影響因素之一。
由于本文采用的算法是一種啟發式隨機優化方法,為了驗證
算法改進之后的有效性,本文用MATLAB7將改進的算法與文獻[25]進行了30次的仿真比較,研究的地形環境分別在10×10以及30×30的柵格障礙物地圖上。
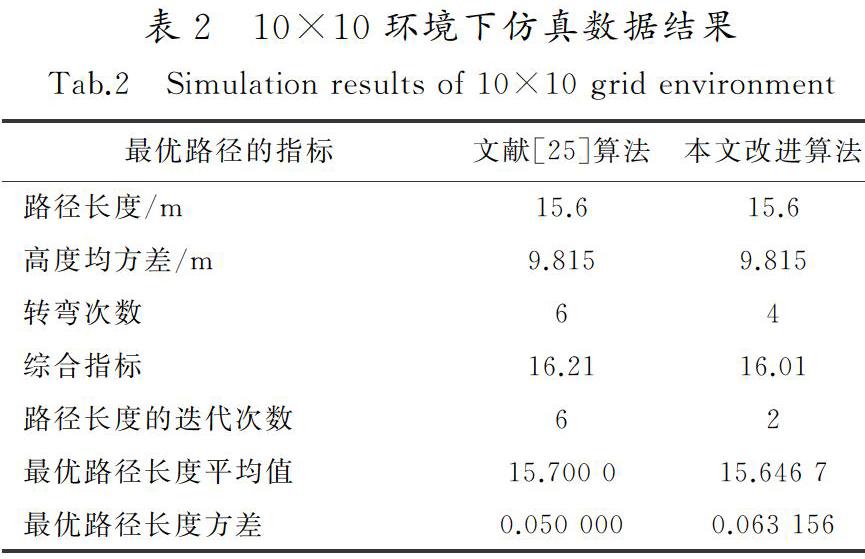
4.3.1?10×10柵格環境下的仿真
如圖5所示,虛線為文獻[25]的最優路徑,實線為本文改進蟻群算法的最優路徑,從圖中可看出路徑大部分是重疊的。但是從路徑整體效果來看,實線的轉彎次數為4次,虛線轉彎次數為6次。在虛線第4次轉彎時,實線保持原路徑方向繼續前進,路徑的平滑性較好。
圖6為不同迭代次數時最優路徑長度的比較。在開始時,實線的路徑長度比虛線的路徑長度長,但是在進行迭代之后,實線較快地找到了較短路徑,而虛線在相同迭代次數下,找到的路徑長度并不是最佳的。
圖7為不同迭代次數時最優路徑的高度均方差的比較。開始時,實線與虛線的初始值相同,隨著迭代次數的增加,可以看出實線的高度均方差在迭代5次以內達到穩定值,而虛線在迭代5次以外達到穩定值。
圖8為不同迭代次數時最優路徑的轉彎次數的比較。從圖8中可以看出,實線和虛線初始在同一迭代次數下,轉彎次數是相同的,當迭代次數大于5時,隨著迭代次數的增加,引入自適應啟發函數因子的實線得到一個新的較少的轉彎次數,而虛線保持原來的轉彎次數,表明改進的蟻群算法增加了蟻群對路徑環境的整體性考慮,跳出了局部最優。
圖9為不同迭代次數時最優路徑的綜合指標以及平均綜合指標的比較,綜合指標即為距離修正函數、安全性函數以及平滑性函數的綜合評價,指標越低則算法越優。從圖9可以看出,本文改進算法最優路徑的綜合指標在初始時的值較大,隨著迭代次數的增加,較快地收斂到穩定值。
通過表2可以看出,本文的改進算法降低了迭代次數,綜合指標相對較小。為了減少算法隨機性對實驗結果帶來的影響,本文在運行30次的情況下,對最優解的平均值以及方差進行了計算,如表2中的最優路徑長度平均值以及最優路徑長度方差所示。對于最優路徑長度平均值之間的比較,從數據上看,差別不太大,為了更充分地體現差別,同時考慮到實際無人機飛行環境是復雜的,所以繼續加大復雜程度,將環境建立在30×30的柵格環境中。
4.3.2?30×30柵格環境下的仿真
如圖10所示,虛線為文獻[25]的最優路徑,實線為本文改進算法的最優路徑。從圖10可看出,在第二次轉彎的地方,虛線的路徑為直線,而實線的路徑為斜線,實線的路徑長度較短。從路徑整體效果來看,實線的轉彎次數為19次,虛線轉彎次數為16次。從路徑的整體性考慮,雖然轉彎次數增加了,但是路徑的長度減少了。
圖11為不同迭代次數時最優路徑的長度比較。從圖11中可以看出,在引入自適應啟發函數因子的情況下,開始迭代時,本文改進算法的路徑長度較短,經過迭代后,很快找到較短路徑并且達到穩定值。從結果可以得出,本文算法增加了螞蟻考慮路徑整體性的能力,并且提高了螞蟻搜索路徑的效率。
圖12為不同迭代次數時最優路徑的高度均方差的比較。開始時刻,實線與虛線的初始值相同,隨著迭代次數的增加,可以看出實線的高度均方差在迭代次數10以內達到穩定值,而虛線在迭代次數10以外達到穩定值,而且實線達到穩定值的速度較快。
圖13為不同迭代次數時最優路徑的轉彎次數的比較。從圖13可以看出,由于引入自適應啟發函數因子,螞蟻選擇路徑時考慮路徑整體性,所以實線較為平緩,波動不太大。
圖14為不同迭代次數時最優路徑的綜合指標以及平均綜合指標的比較,指標越低則算法越優。從圖14可以看出,本文改進算法最優路徑的綜合指標曲線整體較為平緩,并且隨著迭代次數的增加,較早地趨于穩定值。
通過表3中路徑長度、高度均方差、轉彎次數、綜合指標以及路徑長度的迭代次數等數據結果可以看出,改進的蟻群算法找到的路徑長度相對較短,并且在路徑長度的迭代次數上,改進的蟻群算法的迭代次數相對較少。
5?結?語
螞蟻在柵格環境中尋找路徑時,當前柵格到其鄰接柵格的距離不完全相同。
為了能夠更加準確地考慮路徑長度對蟻群選擇下一柵格的影響,本文在啟發函數中加入當前柵格到其鄰接柵格的歐式距離,增加了啟發函數的影響因素,構成了一個閉環反饋,同時在轉移概率中引入自適應啟發函數因子,即將起始點到待走柵格再到目的點的距離作為螞蟻選擇下一個柵格的轉移概率影響因素之一,增加了對環境整體的考慮,并對信息素以及信息素揮發因子進行改善,減小因路徑上過多或過少的信息素對螞蟻選擇路徑產生的影響,避免螞蟻在搜索路徑過程中陷入局部最優。
本文改進算法提高了螞蟻搜索路徑的效率,實驗結果表明,改進算法減少了路徑的長度,降低了迭代次數,路徑更平緩,得到的曲線較為平穩,能夠較快地達到穩定值。自適應多啟發蟻群算法使得無人機路徑規劃的綜合指標以及平均綜合指標均有所降低。
本文將無人機的三維環境投影到二維進行研究,簡化了飛行環境,未來還需增加飛行環境的復雜度,以提升算法的實際應用性。
參考文獻/References:
[1]?唐立,郝鵬, 張學軍. 基于改進蟻群算法的山區無人機路徑規劃方法[J]. 交通運輸系統工程與信息, 2019, 19(1): 158-164.
TANG Li, HAO Peng, ZHANG Xuejun. An UAV path planning method in mountainous area based on an improved ant colony algorithm[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(1): 158-164.
[2]?CHEN Yongbo, LUO Guanchen, MEI Yuesong, et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2016, 47(6): 1407-1420.
[3]?何燕.基于動態加權A*算法的無人機航跡規劃[J].河北科技大學學報,2018,39(4):349-355.
HE Yan.UAV route planning based on improved dynamic weighted A* algorithm[J].Journal of Hebei University of Science and Technology,2018,39(4):349-355.
[4]?甄然, 張春悅, 矯陽, 等. 基于自適應多態融合蟻群算法的無人機航跡規劃[J].河北科技大學學報, 2019, 40(6): 526-532.
ZHEN Ran, ZHANG Chunyue, JIAO Yang, et al. Research on UAV route planning based on adaptive polymorphic ant colony algorithm[J]. Journal of Hebei University of Science and Technology, 2019, 40(6): 526-532.
[5]?王琪, 馬璐, 鄧會亨. 基于遺傳算法的UAV自適應航跡規劃[J]. 計算機系統應用, 2013, 22(1): 200-203.
WANG Qi, MA Lu, DENG Huiheng. Adaptive path planning of the UAV based on genetic algorithm[J]. Computer Systems & Applications, 2013, 22(1): 200-203.
[6]?熊華捷, 蔚保國, 何成龍. 基于改進粒子群算法的UAV航跡規劃方法[J]. 計算機測量與控制, 2020, 28(2): 144-147.
XIONG Huajie, YU Baoguo, HE Chenglong. UAV path planning method based on improved PSO[J]. Computer Measurement & Control, 2020, 28(2): 144-147.
[7]?WANG G G,CHU H E,MIRJALILI S.Three-dimensional path planning for UCAV using an improved bat algorithm[J].Aerospace Science and Technology,2016,49:231-238.
[8]?MIAO Hui, TIAN Yuchu. Dynamic robot path planning using an enhanced simulated annealing approach[J]. Applied Mathematics and Computation, 2013, 222: 420-437.
[9]?武曉晶, 許磊, 甄然, 等. 動態步長BI-RRT的無人機航跡規劃算法[J]. 河北科技大學學報, 2019, 40(5): 414-422.
WU Xiaojing, XU Lei, ZHEN Ran, et al. Dynamic step BI-RRT UAV path planning algorithm[J]. Journal of Hebei University of Science and Technology, 2019, 40(5): 414-422.
[10]趙娟. 啟發點引導D*算法擴展的無人機航跡規劃策略[J]. 機械設計與制造, 2020(2): 153-157.
ZHAO Juan.Unmanned air vehicle route planning strategy based on D* algorithm extension guided by inspiration point[J]. Machinery Design & Manufacture, 2020(2): 153-157.
[11]許江波, 劉琳嵐. 基于改進人工魚群算法的無人機三維航跡規劃[J]. 計算機工程與設計, 2019, 40(2): 540-544.
XU Jiangbo, LIU Linlan. 3D trajectory planning for UAV based on improved artificial fish swarm algorithm[J]. Computer Engineering and Design, 2019, 40(2): 540-544.
[12]程澤新, 李東生, 高楊. 基于蝗蟲算法的無人機三維航跡規劃[J]. 飛行力學, 2019, 37(2): 46-50.
CHENG Zexin, LI Dongsheng, GAO Yang. UAV three-dimensional path planning based on the grasshopper algorithm[J]. Flight Dynamics, 2019, 37(2): 46-50.
[13]余勝東, 吳洪濤, 馬金玉. 應用混沌螢火蟲算法的無人機航跡規劃[J]. 機械設計與制造, 2018(11): 113-116.
YU Shengdong, WU Hongtao, MA Jinyu. Path planning for unmanned air vehicle based on chaotic glowworm swarm optimization[J]. Machinery Design & Manufacture, 2018(11): 113-116.
[14]陸天和, 劉莉, 賀云濤, 等. 多無人機航跡規劃算法及關鍵技術[J]. 戰術導彈技術, 2020(1): 85-90.
LU Tianhe, LIU Li, HE Yuntao, et al. Multi-UAV path planning algorithm and key technology[J]. Tactical Missile Technology, 2020(1): 85-90.
[15]肖作林,王鵬,冷淑香,等.多無人作戰飛機雙精度航跡規劃技術[J].戰術導彈技術,2016(3):53-57.
XIAO Zuolin,WANG Peng,LENG Shuxiang,et al.Research on the double precision mission planning in multi-UCAV system[J].Tactical Missile Technology,2016(3):53-57.
[16]朱莉凱,沈朝萍,沈寶國,等.無人機航跡規劃群智能優化算法綜述[J].數字技術與應用,2019,37(8):126.
ZHU Likai,SHEN Chaoping,SHEN Baoguo,et al.A survey of intelligent optimization algorithms for UAV route planning group[J].Digital Technology and Application,2019,37(8):126.
[17]王輝, 胡曉陽. 基于蟻群算法的無人機航跡規劃研究[J]. 科技資訊, 2020, 18(10): 29-30.
[18]劉蓉,楊帆,張衡.基于改進混沌蟻群算法的無人機航路規劃[J].指揮信息系統與技術,2018,9(6):41-48.
LIU Rong,YANG Fan,ZHANG Heng.Path planning for UAV based on improved chaotic ant colony algorithm (CACA)[J].Command Information System and Technology,2018,9(6):41-48.
[19]張松燦, 普杰信, 司彥娜, 等. 蟻群算法在移動機器人路徑規劃中的應用綜述[J]. 計算機工程與應用, 2020, 56(8): 10-19.
ZHANG Songcan, PU Jiexin, SI Yanna, et al. Survey on application of ant colony algorithm in path planning of mobile robot[J]. Computer Engineering and Applications, 2020, 56(8): 10-19.
[20]王瓊, 劉美萬, 任偉建, 等. 無人機航跡規劃常用算法綜述[J]. 吉林大學學報(信息科學版), 2019, 37(1): 58-67.
WANG Qiong, LIU Meiwan, REN Weijian, et al. Overview of common algorithms for UAV path planning[J]. Journal of Jilin University(Information Science Edition), 2019, 37(1): 58-67.
[21]HUANG Liwei, QU Hong, JI Peng, et al. A novel coordinated path planning method using k-degree smoothing for multi-UAVs[J]. Applied Soft Computing, 2016, 48: 182-192.
[22]TAO Jihua, WANG Yinqiu, YANG Huanhuan, et al. Three-dimensional path planning of unmanned aerial vehicle under complicated environment[C]//第28屆中國控制與決策會議論文集(下).?[S.l.]:[s.n.],2016: 1498-1503.
[23]孫功武,蘇義鑫,顧軼超, 等. 基于改進蟻群算法的水面無人艇路徑規劃[J/OL]. 控制與決策.
[2019-11-04]. https://doi.org/10.13195/j.kzyjc.2019.0839.
SUN Gongwu, SU Yixin, GU Yichao, et al. Path planning for unmanned surface vehicle based on improved ant colony algorithm[J/OL]. Control and Decision. [2019-11-04].https://doi.org/10.13195/j.kzyjc.2019.0839.
[24]黃心,向煜. 基于改進蟻群算法的無人機航跡規劃仿真研究[J]. 城市勘測,2019(1):83-87.
HUANG Xin, XIANG Yu. Simulation research on UAV route planning based on improved ant colony algorithm[J]. Urban Geotechnical Investigation & Surveying, 2019(1): 83-87.
[25]李理,李鴻,單寧波.多啟發因素改進蟻群算法的路徑規劃[J].計算機工程與應用,2019,55(5):219-225.
LI Li,LI Hong,SHAN Ningbo.Path planning based on improved ant colony algorithm with multiple inspired factor[J].Computer Engineering and Applications,2019,55(5):219-225.
[26]陳勁峰,黃衛華,王肖,等.基于改進蟻群算法的移動機器人路徑規劃[J].高技術通訊,2020,30(3):291-297.
CHEN Jinfeng,HUANG Weihua,WANG Xiao,et al.Research on path planning based on an improved ant colony algorithm for mobile robot[J].Chinese High Technology Letters,2020,30(3):291-297.
[27]KHALED A, FARID K. Mobile robot path planning using an improved ant colony optimization[J]. International Journal of Advanced Robotic Systems, 2018, 15(3): 1-7.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41