頻率估計的ANF誤差函數分析及在科氏流量計中的應用
2021-01-27 03:33:46涂亞慶
物聯網技術 2020年12期
李 明,涂亞慶,萬 平,肖 瑋,陳 鵬
(陸軍勤務學院,重慶 401311)
0 引 言
自適應陷波器(ANF)頻率估計方法在衛星導航定位、工業控制與儀表、醫學工程等物聯網技術中應用廣泛[1-4]。相比基于FFT離散頻譜校正的傳統頻率估計方法[5-6],ANF頻率估計方法計算過程更簡便,具備良好的抗噪性能,更為重要的是無頻譜泄漏。ANF通過采用自適應方式調整濾波器參數,基于時域遞推估計方法對輸入信號的頻率進行實時估計,這不僅適用于估計時不變的信號頻率,且對時變信號,即頻率時刻發生變化的信號也適用。此外,它還具備較好的估計性能,有效克服了傳統基于FFT頻率估計方法的局限性。ANF具備較多優點,但在具體應用過程中也存在一些缺點,如針對頻率靠近頻譜兩端的正弦信號,即信號頻率接近于0或π時,其頻率估計精度會出現一定下降,且收斂速度受參數影響較大,頻率估計易出現不穩定的情況[7]。
究其原因,主要是ANF自身所采用的誤差函數過于平緩,ANF根據誤差函數梯度值搜尋全局極值點較緩慢,從而導致ANF收斂速度慢、自身不穩定的情況出現。為解決現有ANF頻率估計方法存在的收斂速度慢、精度低、穩定性差等不足,文中通過分析多種誤差函數的性能,提出一種新的誤差函數。該函數改善了ANF在整個頻率范圍內的迭代收斂曲面,提高了ANF頻率估計精度,加快了ANF收斂速度,提升了ANF穩定性。同基于原誤差函數的ANF頻率估計方法進行比較,驗證了本文所提方法的有效性。
1 誤差函數分析
正弦信號如式(1)所示:

式中:A為信號幅值;ω0為信號頻率;θ為信號相位,服從[0, 2π)的均勻分布;v0(k)是服從N(0,σ2)的加性高斯白噪聲;N為采樣信號長度。
ANF傳遞函數如式(2)所示:

式中:0<ρ<1,用以控制ANF的陷波寬度;ANF參數a=-2cosω,ω為陷波器頻率,在ANF頻率估計過程中ω→ω0。ANF的FIR和IIR結構分別為N(z,a)和H(z,a),e1(k)和e2(k)分別為x(k)通過N(z,a)和H(z,a)的信號,如式(3)所示:

ANF通過自適應調整參數a獲得正弦信號頻率值,使式(4)~式(6)的誤差函數最小化[8-10]:
式中,E[·]表示求取期望。實際計算時按式(5)所示計算:

由于輸入信號為正弦信號,故式(2)中N(z,a)和H(z,a)在輸入信號頻率z=ejω0處的幅值為:

相角為:
結合式(3)、式(6)、式(7),可得:

將式(6)~式(8)代入式(4),可得式(9),式(9)分別對a求導,可得式(10)。
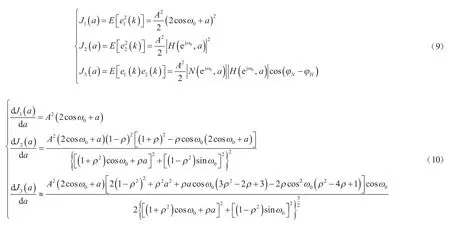
由式(10)可獲得誤差函數導數的理論計算值。在實際計算中,可采用式(11)進行計算:

由式(5)可得:

式中[10]:A=1,θ=π/6,ρ=0.95,N=200。按式(12)計算不同誤差函數的導數值,如圖1所示,導數為0點處為最優頻率估計解。

圖1 A=1,θ=π/6,ρ=0.95,N=200時,不同誤差函數的導數值
由圖1可知,當信號頻率ω0=π/3時,文獻[8]所提誤差函數受噪聲影響較大,低信噪比條件下頻率估計值發生偏轉,但具備良好的梯度值,收斂速度可得到保證。當信號頻率靠近頻譜兩端時,其誤差函數性能出現較大幅度下降。
文獻[9]所提誤差函數受噪聲影響較小,且靠近頻譜兩端信號,其函數性能未出現明顯變化,但其整體梯度值較小,導致算法收斂速度過慢。
文獻[10]所提誤差函數,當頻率ω0=π/3時,其極值點不唯一,將限制其初始頻率的選擇。針對頻譜兩端信號,其導數為0點不存在,導致頻率估計精度下降,無法獲得滿意結果。
根據上述三種誤差函數的優缺點,本文提出一種新誤差函數,使其在頻率范圍內具備較好的梯度值,且受噪聲影響較小。針對頻譜兩端信號,其誤差函數能保持優良性能。本文將ANF的FIR結構和IIR結構輸出信號的和的平方作為新誤差函數,如式(13)所示:

在實際計算中可按式(14)進行計算:

其導函數為:

結合式(9)可知新誤差函數的理論計算值為:

保持參數不變,本文所提新誤差函數的導函數如圖2所示。不論待估頻率為ω0=π/3還是ω0=π/20,誤差函數在導數值為0處獲得極值點,且極值點唯一。當初始頻率值與最優頻率解相距較遠時,其誤差函數的導數值較大,當誤差函數保持較大梯度值時,可加快其收斂速度。

圖2 參數保持不變,SNR=5 dB時誤差函數的導數值
2 應用分析
2.1 計算分析
根據式(12)和式(15),不同誤差函數所得頻率估計方法如下所示:

為了獲得頻率估計收斂速度與精度的比較結果,信號及ANF參數設定為:A=1,θ=π/6,ρ=0.95,信噪比為5 dB。考慮到對稱性,故只針對頻率接近0時的信號,信號頻率ω0從π/20變為 0.7π,從 0.01π變為 0.2π,即a=-2cosω0從 -1.975 4變為 1.175 6,從 -1.999 0 變為 -1.618 0。步長μ=2×10-4,ANF參數a初值設為0。頻率變化條件下不同方法的頻率估計結果如圖3所示。

圖3 頻率變化條件下不同方法的頻率估計結果
由圖3可知,文獻[8]誤差函數由于受噪聲影響較大,其方法在低信噪比條件下喪失了頻率估計能力;文獻[9]誤差函數由于梯度值過于平緩,導致收斂速度過慢,無法及時得出令人滿意的頻率估計結果;文獻[10]誤差函數雖具備較為適中的收斂速度和精度,但當信號頻率發生變化時,其頻率估計精度存在一定的不穩定性。本文所提新誤差函數具備良好的梯度,且自身性能滿足不同條件下的頻率估計要求,可得出較好的收斂速度和頻率估計精度。
2.2 實驗分析
為驗證所提新誤差函數的性能,本文針對項目組自行研制的科里奧利質量流量計(Coriolis Mass Flowmeter,CMF)實驗平臺頻率估計問題進行實驗分析。該CMF型號為進口羅斯蒙特CMF-FS200型。科氏流量計實驗平臺如圖4所示。實驗分析中流量計示值為0~105.2 kg/min,CMF頻率值約為 198 Hz,采樣頻率為 20 000 Hz,即ω0=0.062 2,a0=-1.996 1,參數設置μ=2×10-4,ρ=0.95,a(0)=0。流量處于0~105.2 kg/min范圍時,不同方法的頻率估計結果如圖5所示。

圖4 科氏流量計實驗平臺

圖5 流量處于0~105.2 kg/min范圍時,不同方法的頻率估計結果
由圖5可知,本文所提新誤差函數頻率估計方法的性能同實驗分析結果基本一致,具備收斂速度快、頻率估計精度高、穩定性好等特點。
3 結 語
本文在分析不同誤差函數及其導數性能的基礎上,提出的新誤差函數具備良好的梯度值,可有效提升基于該新誤差函數ANF頻率估計方法的收斂性能及頻率估計精度。實驗分析表明,該新誤差函數適用范圍較廣,可滿足頻率變化要求,尤其針對頻譜接近0或π條件下的頻率估計問題,可有效增強ANF頻率估計方法的穩定性,應用前景較好。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
