基于北斗定位技術的液體管線測繪方法研究
2021-01-27 03:48:16田瑜基
物聯網技術 2020年12期
關鍵詞:測繪
田瑜基
(廈門精圖信息技術有限公司,福建 廈門 361008)
0 引 言
城市的正常運作需要多種基礎設施的服務,地下管線是其中重要的基礎設施之一[1]。城市地下管線在城市安全管理中扮演重要角色,與百姓的生活緊密相關,是城市規劃建設管理工作的重要內容。國務院辦公廳在2014年發布了指導意見,要求加強城市地下管線的建設和管理。同年住建部下發了工作通知,開展城市地下管線的普查工作,要求同時做好城市地下管線的信息化系統建設[2-4]。
液體輸送管線是多種管線的其中之一[5]。液體輸送管線包括供水管線、排水管線、石油管線等用于輸送液體的管線,大部分埋設于地下。管線的材質有多種類型,但所有液體運輸管線都具備一項共有特征,即管線內部的液體流動軌跡與管線的埋設軌跡完全相同。隨著北斗定位系統建設的逐步完善,利用北斗定位技術計算位置信息已經普及,將北斗定位技術應用于測繪行業已經成為趨勢。
1 數據采集端設計與實現
數據采集端設計為球體,球體內部分為上下兩個封閉的腔室,頂部腔內充有氦氣,其作用是增加測繪球的浮力。在不同液體中通過改變預裝氦氣的量,使得測繪球懸浮在液體中。測繪球底部腔室中裝有振動發電機構,在振動發電機構與底部腔的頂面之間的間隙中,裝有定位模塊和通信模塊。數據采集端結構如圖1所示。
將測繪球從管線上游的某一開口處放入液體管線內,測繪球懸浮在液體中并隨著液體的流動向下游移動。在測繪球的移動過程中,振動發電機構產生電能,定位模塊通過接收北斗衛星數據計算出位置信息,通信模塊將測繪球的位置數據傳遞到系統后臺數據庫。

圖1 數據采集端結構
在液體管線下游的某開口處設置濾網結構,濾網結構的網孔的孔徑小于測繪球的球徑。當測繪球到達濾網結構時會被阻攔繼續向下游移動,此時即可將測繪球從管線中取出。
2 數據處理端的設計與實現
2.1 數據接收
每件測繪球的通信模塊中設有唯一編碼。數據采集端將位置數據從管線內部傳遞到系統后臺,系統后臺設計有數據處理控制軟件。數據處理控制軟件可以選擇開始接收某個數據采集端的位置數據,位置數據的坐標采用的是北斗坐標系。測繪數據采集控制界面如圖2所示。
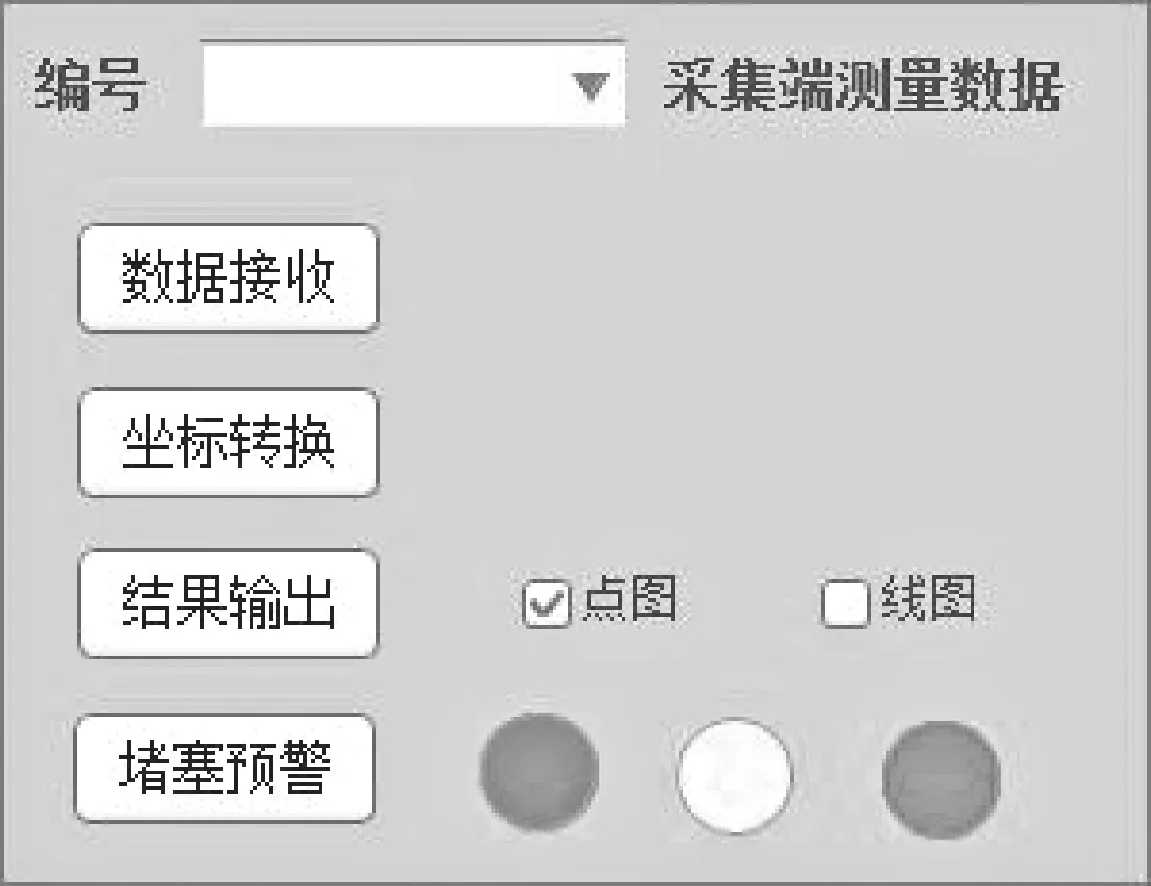
圖2 測繪數據采集控制界面
2.2 數據坐標轉換
2000國家大地坐標系在2008年被我國正式啟用,北斗定位系統建設初期計劃采用2000國家大地坐標系,但實施過程根據實際情況又提出北斗坐標系。北斗坐標系采用WGS84(World Geodetic System 1984)參考框架[6],2000國家大地坐標系的坐標參考框架[7]是ITRF1997。將測繪球獲取的位置數據坐標轉換到2000國家大地坐標,需要先將WGS84參考框架轉換成ITRF2000框架,然后再利用框架轉換法,將ITRF2000框架轉換為ITRF1997框架。
2.3 WGS84參考框架和ITRF2000參考框架間的轉換

式中:m是尺度變化參數;(εX,εY,εZ)是旋轉參數;(?X, ?Y,?Z)是平移參數。
當有3個以上或更多公共點時,先利用最小二乘法求解,然后再利用式(1)將WGS84 參考框架轉換為ITRF2000參考框架。
2.4 ITRF2000參考框架和ITRF1997參考框架間的轉換
ITRF參考框架轉換已經在文獻[8-9]得到了驗證。本文采用該方法實現ITRF參考框架間轉換。ITRF參考框架間的轉換共有三種方法:第一種轉換方法是采用七參數法進行坐標轉換,其缺點是誤差不斷累積,導致精度降低;第二種方法是先進行參考框架的轉換,再進行歷元的轉換;第三種方法是先對歷元進行統一,再進行參考框架的轉換。本文使用第三種轉換方法。
2.4.1 統一歷元
地殼處于不斷運動中,北斗測站在參考框架內的位置會隨時間而改變,因為這種運動比較緩慢,所以近似于勻速線性運動,因此相同參考框架內的歷元的坐標計算公式為[10]:

2.4.2 框架轉換
根據IERS(International Earth Rotation Service)公布的參考框架間14個轉換參數(包括7個轉換參數、7個轉換參數速率),求出t歷元下參考框架間轉換的7個轉換參數。設tK歷元為參考歷元,那么:
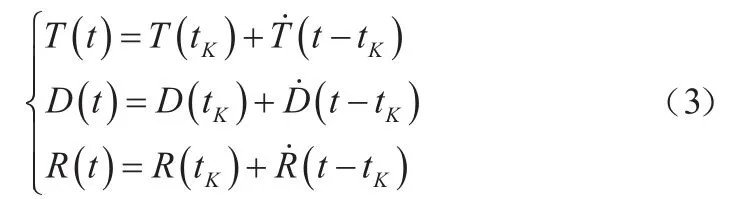
式中:T為平移量;D為尺度因子;R為旋轉量;為轉換參數速率。
求出轉換參數后,采用七參數轉換模型即可實現參考框架間的轉換,其公式為:
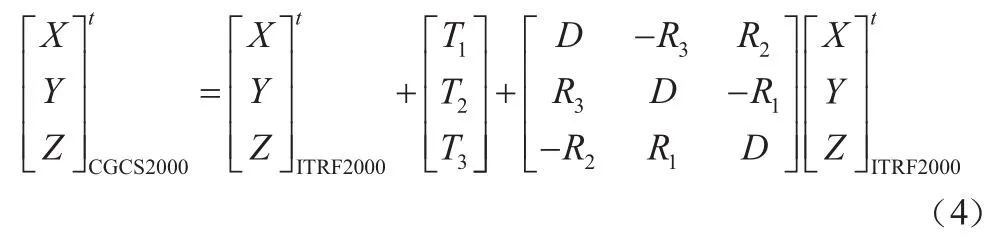
式中:T1,T2,T3為平移量;D為尺度因子;R1,R2,R3為旋轉量。
從ITRF2000到2000國家大地坐標系的轉換參數及速率見表1所列。其中,IGS(ITRF2000)→IGS(2000國家大地坐標系)有14個轉換參數,ppb=10-9m,mas=4.848 13×10-9rad。

表1 從ITRF2000到2000國家大地坐標系的轉換參數及速率(歷元1997)
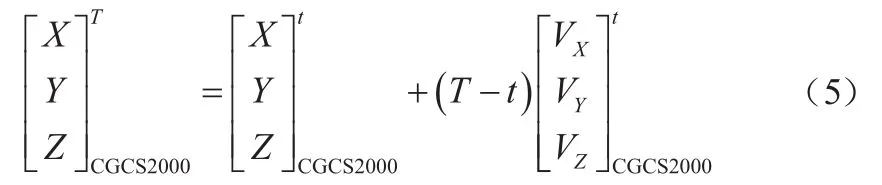
2.5 坐標轉換到T歷元下的2000國家大地坐標
先將坐標轉換至t歷元下的坐標,然后將其轉換至T歷元下的坐標,即:
3 成果輸出及預警
3.1 測繪數據輸出
測繪結果可以以2000國家大地坐標系的坐標形式直接展示在現有底圖上,現有底圖有2D平面圖、3D俯視圖或衛星圖三種模式。采用ArcMAP中的菜單Tools-Add XY Data,構建新的圖層,所有的位置點添加至新的圖層。隨著時間的推移,測繪數據采集端沿著液體管線的路徑移動,隨著數據采集端位置數據的輸出,在底圖上以多個點的形式展示。測繪成果點圖顯示如圖3所示。

圖3 測繪成果點圖顯示
采用Arcgis中Toolbox工具,將隨時間變化的點文件轉換成線文件,多個數據采集端的位置點連接成線,形成該條液體管線的路徑曲線。測繪成果線圖顯示如圖4所示。

圖4 測繪成果線圖顯示
在測繪數據采集控制界面可以選擇是輸出點圖或線圖,線圖的生成本質上也是先生成點圖,再由點圖轉換成線圖。
3.2 管線堵塞預警
目前以管線方式運輸液體的規模日益擴大,液體管線特別是運輸黏度較大的液體時,管線會發生堵塞的現象。當利用本文的測繪方法進行液體管線測繪時,測繪數據采集端依次將位置數據傳遞到系統后臺,因為位置數據傳遞間隔時間是固定的,當水平位置數據變得接近時,說明管線內的液體流速降低,系統根據流速變化值,分別設有藍色預警、黃色預警、紅色預警三種級數遞增的預警模式。管線管理人員根據系統發出的預警信息,在核實后進行相應的處理工作。
3.3 地下金屬管線測繪
目前液體運輸管線的材質主要有鋼管、塑料管、陶土管、水泥管和有色金屬管,當測繪埋設在地下較深的鋼管和有色金屬管時,有時會出現BDS信號收接不良的現象。所以在進行地下金屬管線測繪工作時,可以利用裝載BDS接收機的金屬探測裝置,或者利用RTK技術實現金屬管線的精確測繪。
4 結 語
本文詳細闡述了基于北斗定位技術的液體運輸管線的測繪系統的設計和實現原理。在設計可以懸浮在液體中的測繪結構的基礎上,利用液體運輸管線的特征,將液體中測繪數據采集端的移動路線轉換為管線的測繪路徑數據,同時利用位置數據的改變值,做出不同等級的管線堵塞預警。本系統將測繪與安全應急管理兩個不同領域,在液體管線測繪工作中實現良好融合。
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年5期)2015-12-20 09:07:37
衛星與網絡(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09
