生產平臺大型膨脹彎落物保護系統安裝研究
2021-01-28 03:36:28張亞雷劉耀江盧維強黃佳瀚薛大智
中國新技術新產品 2020年23期
張亞雷 劉耀江 盧維強 黃佳瀚 薛大智
(深圳海油工程水下技術有限公司,廣東 深圳 518054)
0 引言
海洋平臺作為海上石油勘探、開采、處理和輸送的重要設施,具有重大的國民經濟意義。海洋平臺吊機起吊貨物以及供貨船舶裝卸貨物等作業活動頻繁,由于超載起升、操作人員的判斷及工作失誤等原因,可能引發吊裝物體意外墜落事故[1]。落物既可能直接墜落在甲板上,也可能墜落在海中,海底管道在平臺附近布置密集,防護較少,墜落在海中的物體可能對水下管道、立管和設備造成損害,直接影響平臺和油田系統安全生產,產生經濟損失。海洋工程本身具有非常高的風險,一旦出現惡性事故,將造成巨大的經濟損失,嚴重污染環境。
鑒于此,在海洋平臺周圍水下管道和設備安裝落物保護系統,可以有效降低海洋平臺落物對水下管道和設備造成損傷的風險,使平臺和油田系統的安全運營得到保障。
1 項目概況
南海某氣田的主要生產管線為2根0.558 m的海底管道,該氣田中心平臺海底管道與平臺立管底部連接的膨脹彎和一般的平臺底部水平膨脹彎不同,其為大型、立式、三維走向的膨脹彎,是平臺的關鍵節點,一旦發生落物碰撞該膨脹彎并造成海管損傷,極易導致油氣泄露或平臺停產。因此考慮到平臺吊機日常作業的落物風險,需要在該膨脹彎上部安裝落物保護系統,以保證設施和生產的安全。鑒于該大型膨脹彎的長度(約100 m)和高度(約10 m)較大,且2根膨脹彎既靠近,走向卻又不同,所以膨脹彎保護系統考慮分段設計和制造,并在水下進行連接安裝。此類保護框架安裝在國內尚屬首次,該文主要描述膨脹彎落物保護系統的海上安裝過程和注意事項。
2 落物保護系統施工方案的確定
2.1 落物保護系統的組成
在平臺落物保護系統海上安裝項目中,落物保護系統是由分段的19個保護框架組成的,如圖1所示。保護框架信息見表1。
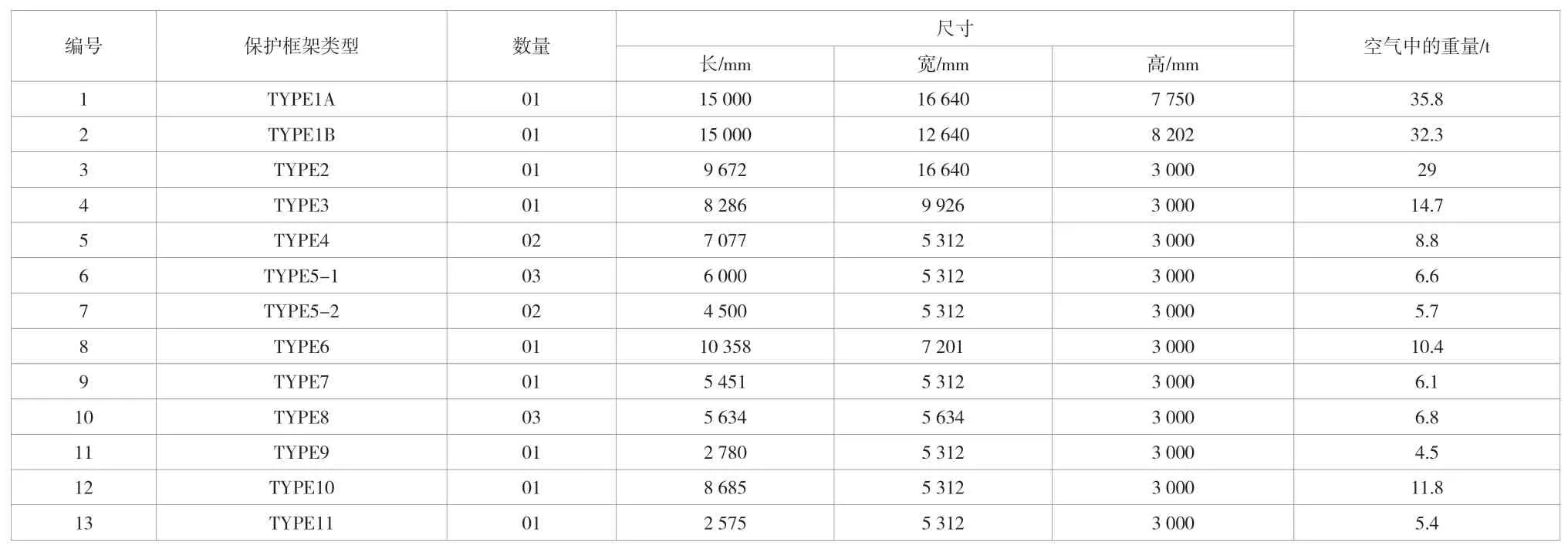
表1 保護框架數據表
2.2 落物保護系統施工方案
針對項目自身的特點,選擇合適的、可行的施工方案是整個工程的重中之重。該項目的特點是:水下200 m 左右,屬于較深水,因為國內無法利用飽和潛水系統進行安裝,只能采用作業級水下機器人進行安裝就位,所以該項目所有保護框架設計均帶有水下機器人操作把手,可以利用作業級水下機器人進行保護框架安裝。

圖1 保護框架安裝效果圖
落物保護系統施工方案有3個:1)19個保護框架分別預安裝吊裝索具。2)主作業船和運輸駁船共同將保護框架運輸至作業現場。3)在作業現場利用作業級水下機器人依次將保護框架安裝到位。
3 落物保護系統海上安裝
該項目保護框架安裝位置處于平臺附近,需要選用至少具有船舶動力定位系統(DP)的、配置2臺作業級水下機器人的船舶作為主作業船,并且主作業船需要長時間在平臺附近作業,與平臺有較高的碰撞風險,所以在平臺上安裝激光反射板,主作業船駕駛室可以實時接收平臺發來的信號,以此來確定主作業船與平臺之間的距離,可以時刻保證主作業船與平臺任何突出部位保持10 m的最小安全距離。
對于水下結構物的安裝,最主要的是要滿足精度要求。在該項目中,待保護管段存在多段彎曲轉折處,保護框架需要按照一定的安裝順序將限位鉤、銷連接成一體,如果前面的保護框架安裝誤差較大,會導致后續保護框架無法安裝;同時,由于平臺樁腿和水泥支撐等結構物也會限制保護框架的安裝空間,所以需要保持較高的安裝精度。雖然長基線定位系統具有很高的定位精度,但是考慮到布置長基線基陣需要較長的時間,工期和項目成本會增加很多,最終沒有選用長基線定位系統。超短基線定位系統與長基線定位系統相比定位精度較低,但是配合一些定位輔助結構,在安裝過程中也可以得到充分的應用,如圖2所示。
定位輔助結構貼近平臺樁腿放置以后,就可以進行保護框架安裝。
在安裝保護框架類型1A、類型1B和類型2時,由于這3種保護框架質量分別為35.8 t、32.3 t和29 t,重量較大,并且其中一條管線處于生產狀態,有較大的安裝風險,因此需要平臺停產,將管線內壓力泄壓至低于20 bar。另外,由于水下機器人通過水下機器人操作把手不能很好地控制這3個保護框架的艏向角,因此設計了水下機器人對接面板,如圖3所示。利用水下機器人將對接頭插入并鎖定對接面板中控制保護框架的艏向角,水下機器人對接頭如圖4所示。
準備工作完成后,主作業船靠近運輸駁船,吊機吊鉤連接保護框架預安裝索具,起吊到距離運輸駁船甲板5 m的位置,主作業船遠離運輸駁船100 m,保護框架穿過飛濺區下放至水深30 m位置,水下機器人靠近觀察保護框架,繼續下放至距離海底20 m位置,開啟吊機升沉補償,移船至保護框架安裝位置上方,繼續下放保護框架,安裝到位,下放速度為0.2 m/s,水下機器人通過對接面板控制保護框架的艏向角,以保證保護框架的安裝精度。
保護框架安裝就位后,需要解除保護框架連接索具。為了方便水下機器人操作,保護框架吊裝索具通過水下機器人操作鉤與吊機,操作卸扣與保護框架相連以達到解除連接的目的。在實際施工中,水下機器人操作鉤和水下機器人操作卸扣的應用,很大程度地縮短了海上施工工期,節省了項目成本。

圖 2 保護框架安裝定位輔助結構

圖3 水下機器人對接面板

圖4 水下機器人對接頭
4 保護框架安裝風險
4.1 其他類型保護框架安裝風險
其他類型保護框架(保護框架類型1A、1B和類型2除外)距離平臺很遠,且尺寸及質量較小,安裝時有較小的風險,可以采取以下4種措施控制其他類型保護框架的安裝風險:1)細化其他類型保護框架的安裝程序,做好與現場施工人員的技術交底,識別其他類型保護框架安裝過程中可能出現的風險點,對風險點進行重點控制。2)設置合理的保護框架吊裝安全操作區域和保護框架安裝船舶移位路由。3)與平臺做好溝通,作業許可證、班前會及其他安全措施和文件準備齊全,并嚴格按照平臺和船舶施工作業的安全要求和流程進行作業。4)在保護框架上設計水下機器人操作把手,由水下機器人通過操作把手控制保護框架的艏向角,以保證保護框架的安裝精度。
4.2 保護框架類型1A、1B和類型2安裝風險
保護框架類型1A、1B和類型2距離平臺很近,且尺寸及質量較大,安裝時有較大的風險,除了采取4.1中(1)、(2)和(3)所描述的控制措施,還需要采取以下2種措施控制保護框架類型1A、1B和類型2的安裝風險:1)由于保護框架類型1A、1B和類型2安裝時風險較大,安裝時需要平臺暫時停產;2)設計保護框架類型1A、1B和2的對接面板,由水下機器人通過對接頭控制保護框架的艏向角,以保證保護框架的安裝精度。
5 結語
此次在200 m左右水深的落物保護系統安裝作業圓滿完成,深水操作水下機器人進行結構物安裝得到實練,水下機器人操作把手、水下機器人對接頭、水下機器人對接面板、水下機器人操作鉤和水下機器人操作卸扣等便于水下機器人操作的設計和工具得到了充分應用,為今后平臺附近海底管線保護提供了新的解決方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08