電動汽車電機(jī)復(fù)合制動控制系統(tǒng)研究
2021-01-28 03:35:46尹永福
微型電腦應(yīng)用 2021年1期
尹永福
(煙臺汽車工程職業(yè)學(xué)院 車輛運(yùn)用工程系, 山東 煙臺 265500)
0 引言
汽車已經(jīng)成為現(xiàn)代社會中不可缺少的交通工具,提供了巨大的便利,使用數(shù)量不斷增加的傳統(tǒng)燃油汽車使石油資源短缺及環(huán)境污染問題日益突出,在汽車工業(yè)領(lǐng)域以新能源汽車為代表的汽車電動化發(fā)展已成為大勢所趨。電動汽車因具備能量來源充足、低排放等優(yōu)勢而受到廣泛關(guān)注,成為新能源汽車的一種有效解決方案,但由于受到電動汽車?yán)m(xù)航里程及電耗方面不足的限制而降低了使用性能,成為限制電動汽車廣泛應(yīng)用的主要制約因素。針對電動汽車的制動能量通過機(jī)電復(fù)合制動系統(tǒng)進(jìn)行回收利用成為增加續(xù)航里程的有效方式,已成為行業(yè)內(nèi)的研究熱點之一。為兼顧制動性和能量回收率本文完成了針對電動汽車復(fù)合制動系統(tǒng)的控制策略的設(shè)計和優(yōu)化,在確保穩(wěn)定制動的同時完成有效制動能量的回收過程。
1 需求分析
隨著電動汽車的快速發(fā)展及應(yīng)用范圍的不斷擴(kuò)大,對電動汽車性能的要求不斷提高,作為延長電動汽車行駛里程的一種關(guān)鍵技術(shù)和有效方法,再生制動通過對制動時的動能進(jìn)行回收從而實現(xiàn)能量利用率的提高,具備響應(yīng)迅速及控制精確優(yōu)勢,考慮到再生制動電機(jī)所能提供的制動力矩有限,可通過液壓制動彌補(bǔ)這一不足。目前針對復(fù)合制動系統(tǒng)方面的研究已經(jīng)取得了一定的進(jìn)展,多目標(biāo)遺傳算法成為解決問題及優(yōu)化控制策略的常用手段,例如,優(yōu)化目標(biāo)采用油耗(百公里)和排放指標(biāo),在循環(huán)工況下在選擇混合動力系統(tǒng)工作模式時通過多目標(biāo)遺傳優(yōu)化算法的使用完成全局優(yōu)化過程,從而實現(xiàn)控制邏輯參數(shù)的精準(zhǔn)獲取;以回收能量最大化理論為依據(jù)設(shè)計的制動力分配策略,針對優(yōu)化過程通過遺傳算法的使用實現(xiàn)約束問題的有效解決;針對汽車的多目標(biāo)問題(以操作穩(wěn)定性和行駛平順性為主)采用近似模型完成了優(yōu)化過程的研究和設(shè)計,該近似模型基于響應(yīng)面,獲取了較佳的優(yōu)化結(jié)果。現(xiàn)有的再生制動策略大多僅以制動方向穩(wěn)定性作為研究重點,由于對制動效能恒定性的重視不足導(dǎo)致理想制動下的研究存在一定的缺陷[1]。本文在現(xiàn)有研究的基礎(chǔ)上運(yùn)用多目標(biāo)遺傳算法對復(fù)合控制策略進(jìn)行了協(xié)同優(yōu)化,使制動穩(wěn)定性及能量回收效率得到進(jìn)一步提升。
2 復(fù)合制動控制策略優(yōu)化
電動汽車由液壓制動及電動機(jī)再生制動系統(tǒng)復(fù)合而成的復(fù)合制動系統(tǒng)以分配復(fù)合制動力與完善控制策略作為研究重點,優(yōu)化復(fù)合制動系統(tǒng)控制策略則是滿足需求的有效手段,最大程度回收制動能量的同時需確保制動性能,復(fù)合制動系統(tǒng)的控制策略直接影響到包括制動感覺一致性的制動性能、協(xié)調(diào)切換制動模式等問題,優(yōu)化控制策略的過程屬于多目標(biāo)、多邊界問題,是提高整車性能的有效途徑,既存在聯(lián)系又存在沖突的不同優(yōu)化目標(biāo)為協(xié)同優(yōu)化多個性能指標(biāo)提出了更高的要求。
2.1 控制策略
協(xié)調(diào)電動機(jī)與機(jī)械的制動力需采用不同的工作方式,因此電動汽車復(fù)合制動系統(tǒng)結(jié)構(gòu)不同,包括串聯(lián)與并聯(lián)兩種,并聯(lián)再生制動系統(tǒng)存在液壓制動力不可調(diào)的不足,對應(yīng)再生制動系統(tǒng)結(jié)構(gòu)較為復(fù)雜,為彌補(bǔ)上述不足本文的再生制動系統(tǒng)結(jié)構(gòu)采用單軸串聯(lián)的方式。控制策略流程,如圖1所示。
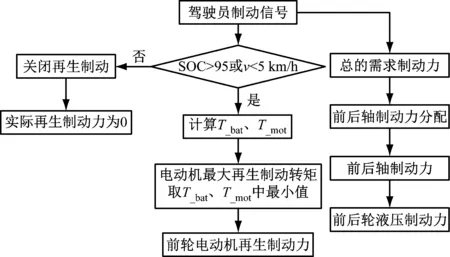
圖1 再生制動控制策略流程
在基本不改變原車制動系統(tǒng)的基礎(chǔ)上,通過將一個調(diào)壓閥安裝于前軸液壓制動管路上實現(xiàn)調(diào)節(jié)前軸液壓制動力的功能,在降低開發(fā)成本的同時使該系統(tǒng)結(jié)構(gòu)對制動能量的回收優(yōu)勢得以充分發(fā)揮。前、后軸制動力在車輛制動狀態(tài)下以機(jī)械制動力分配系數(shù)為依據(jù)完成分配過程,同時將再生制動與否(電動機(jī)再生制動力的提供與否)以當(dāng)前車速、蓄電池荷電狀態(tài)值(分別由v、SOC表示)為依據(jù)進(jìn)行判斷,計算獲取電動機(jī)再生制動轉(zhuǎn)矩(蓄電池最大充電功率下)和電動機(jī)允許的峰值輸出轉(zhuǎn)矩分別由T_mot和T_bat表示,將前軸所需制動力同其進(jìn)行比較,實際電動機(jī)再生制動力取較小值[2]。系統(tǒng)制動力的分配主要包括兩部分即影響制動安全性能的前、后軸制動力及影響制動能量回收的液壓及電動機(jī)制動力,制動力分配需在確保車輛安全的同時使回收制動能量過程得以有效實現(xiàn),并據(jù)此對控制策略進(jìn)行優(yōu)化。
2.2 設(shè)計變量的選取
制動過程制動力分配系數(shù)因受到電動機(jī)再生制動力的影響會發(fā)生變化,前、后軸制動力的分配過程不再以制動系統(tǒng)的固定比例進(jìn)行,將制動力分配系數(shù)(由β表示)以ECE制動法規(guī)為依據(jù)實現(xiàn)在某一合理變化范圍內(nèi)的有效控制,以確保實現(xiàn)提升制動效能及制動穩(wěn)定性的設(shè)計目標(biāo),蓄電池相關(guān)參數(shù)(包括內(nèi)阻及充放電效率)會受到SOC值的影響,進(jìn)而影響到蓄電池的能量利用率。再生制動能量回收效率以電動機(jī)制動力作為主要的衡量指標(biāo)之一,且電動機(jī)再生制動轉(zhuǎn)矩的最大值同其有效再生制動功率的最大值并不對應(yīng),假設(shè),蓄電池荷電狀態(tài)的最大值由HSOC表示、最小值由LSOC表示,電動機(jī)再生制動轉(zhuǎn)矩由Tm_reg表示(單位N·m),軸制動力分配系數(shù)由β表示,針對復(fù)合制動系統(tǒng)隊變量X進(jìn)行優(yōu)化設(shè)計,X的表達(dá)[3],如式(1)。
X=[β,Tm_reg,LSOC,HSOC]T
(1)
2.3 目標(biāo)函數(shù)
(1) 制動穩(wěn)定性目標(biāo)函數(shù)
制動穩(wěn)定性在復(fù)合制動的影響下會發(fā)生變化,對于前驅(qū)型電動汽車,由于車速對電動機(jī)再生制動力矩的有效較大,前軸在再生制動力矩過大的情況下會發(fā)生后軸抱死進(jìn)而影響前輪轉(zhuǎn)向能力,并且導(dǎo)致附著利用率曲線超出合理范圍,對方向穩(wěn)定性及制動效率產(chǎn)生不利影響,本文的制動穩(wěn)定性的目標(biāo)函數(shù)采用了前、后輪附著利用率(滿足ECE要求),路面附著情況由附著系數(shù)進(jìn)行表征,通過對制動時汽車的受力分析,假設(shè),制動強(qiáng)度由z表示,z強(qiáng)度下第i(取值為1或2,分別對應(yīng)前軸和后軸)軸上的利用附著系數(shù)由φi表示,z強(qiáng)度下i軸上的地面制動力及地面對其法向反力分別由FXbi、FZi表示,定義φi的表達(dá)[4],如式(2)。
φi=FXbi/FZi
(2)
汽車在復(fù)合制動情況下,假設(shè),G表示整車載重,電動機(jī)再生制動力由Fm_reg表示,整車質(zhì)心高度由hg表示,整車質(zhì)心到前軸距離由a表示、到后軸距離由b表示,L(L=a/b)表示汽車軸距,前軸利用附著系數(shù)由φ1表示,后軸利用附著系數(shù)由φ2表示,如式(3)、式(4)。
(3)
(4)
路面附著條件在φ1和φ2越接近同制動強(qiáng)度的情況下發(fā)揮得越充分,證明制動力分配越合理,制動穩(wěn)定性的目標(biāo)函數(shù)F的表達(dá),如式(5)(即前、后輪附著利用率)。
(5)
(2) 制動能量回收效率目標(biāo)函數(shù)
最終在蓄電池中存儲電動機(jī)再生制動過程產(chǎn)生的制動能量,制動能量的回收效率受到蓄電池及電動機(jī)的充、發(fā)電效率的影響,電動機(jī)轉(zhuǎn)速及制動轉(zhuǎn)矩影響其發(fā)電效率。針對制動能量回收效率,以最終獲取的有效再生制動功率作為其目標(biāo)函數(shù)。假設(shè),電動機(jī)轉(zhuǎn)速由ωm表示,蓄電池工作溫度由TBtem表示,由η表示的蓄電池聯(lián)合效率函數(shù)關(guān)系表達(dá)[5],如式(6)。
η=f(Tm_reg,ωm,SOC,TBtem)
(6)
制動能量回收效率的目標(biāo)函數(shù)表達(dá),如式(7)。
MaximizeP=Tm_regωmf(Tm_reg,ωm,SOC,TBtem)
(7)
2.4 約束條件
假設(shè),電動機(jī)再生制動轉(zhuǎn)矩上限在滿足ECE規(guī)定、滿足蓄電池最大充電功率及滿足電動機(jī)峰值轉(zhuǎn)矩的情況下分別由Tm_ece、Tm_bat和Tm_mot表示;原車制動力分配系數(shù)由βH表示,優(yōu)化后則由βmax表示,目標(biāo)函數(shù)優(yōu)化過程需對汽車軸制動力、制動同地面附著條件的關(guān)系、電動機(jī)峰值轉(zhuǎn)矩、蓄電池充電功率等[6]進(jìn)行考慮,如式(8)。
Tm_reg=min(Tm_ece,Tm_bat,Tm_mot)
βH<β<βmax
z/φ1≥70%
(8)
在z大于0.3的情況下φ2的取值不超過(z-0.018)/0.74。
3 多目標(biāo)優(yōu)化遺傳算法應(yīng)用
對于多目標(biāo)優(yōu)化問題,協(xié)調(diào)和折中多個目標(biāo)(存在競爭關(guān)系)是求解的關(guān)鍵所在,其實質(zhì)在于尋求決策空間中的Pareto非劣解集。不受問題限制的遺傳算法具備較強(qiáng)的全局搜索能力,有利于種群多樣性和均勻性的保持,適用于求解多目標(biāo)問題,為有效彌補(bǔ)傳統(tǒng)多目標(biāo)優(yōu)化方法缺少客觀性的不足,本文所采用的多目標(biāo)遺傳算法基于Pareto解集,使遺傳算法的優(yōu)勢(包括隨機(jī)性和隱含并行性)得以充分發(fā)揮,可針對多目標(biāo)問題進(jìn)行全局范圍的搜索以獲取最優(yōu)解,使復(fù)合制動系統(tǒng)優(yōu)化問題得以有效解決。作為一種多目標(biāo)遺傳算法,非支配排序遺傳算法(NSGA-Ⅱ)在收斂性、分布性及運(yùn)行效率上表現(xiàn)出強(qiáng)大的優(yōu)勢,通過精英策略的引入實現(xiàn)優(yōu)秀個體從父代種群到子代種群的直接引入過程,為使算法以概率1搜索到最優(yōu)解,混合所有個體后(包括父代與子代)完成無支配性排序,以確保種群的多樣性。本文采用NSGA-Ⅱ算法完成雙目標(biāo)優(yōu)化問題的求解。計算過程,如圖2所示。
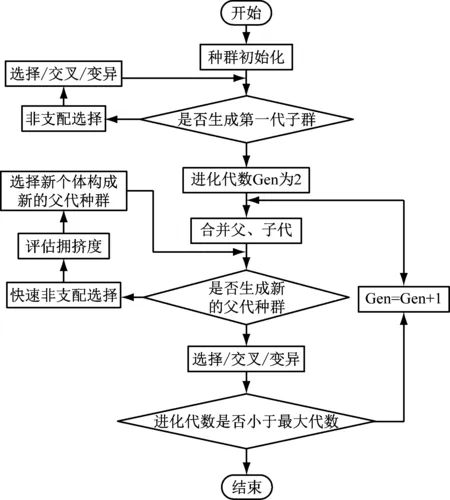
圖2 NSGA-Ⅱ算法流程
優(yōu)化過程的參數(shù)設(shè)置為:種群規(guī)模為20,交叉率和變異率分別為0.8、0.1,用Matlab模型構(gòu)建多目標(biāo)問題后,將其集成到優(yōu)化軟件Isight中通過設(shè)計變量實現(xiàn)對控制策略中關(guān)鍵參數(shù)的優(yōu)化,完成本文算法的優(yōu)化過程(包括自動搜索及迭代運(yùn)算),Pareto非劣解集經(jīng)迭代運(yùn)算后即可獲取[7]。為確保生成個體為一,需在預(yù)設(shè)約束范圍內(nèi)對初始及子代種群進(jìn)行取值,初始種群、第50代及第100代多目標(biāo)優(yōu)化結(jié)果良好,非劣解數(shù)目在種群進(jìn)化到100代時明顯增加,個體表現(xiàn)出良好的分布性,Pareto前沿分布均勻,目標(biāo)函數(shù)到第100代種群時達(dá)到最終收斂,對應(yīng)獲取一組Pareto最優(yōu)解(各最優(yōu)解間無優(yōu)劣之分)。仿真模型參數(shù)選取一組優(yōu)化結(jié)果,如表1所示。
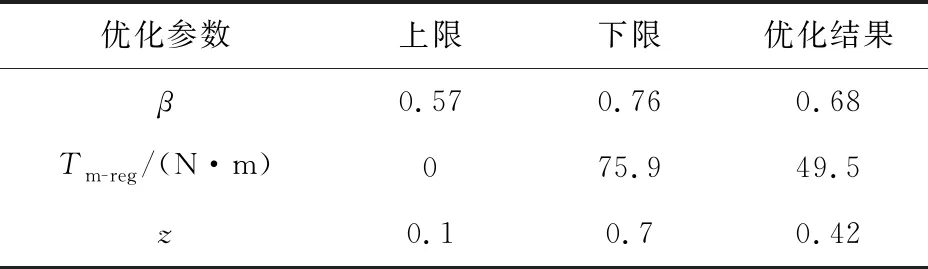
表1 參數(shù)優(yōu)化結(jié)果
4 仿真測試
為了檢測本文所設(shè)計電動汽車制動系統(tǒng)控制策略優(yōu)化方法的性能,針對典型的制動工況在Matlab平臺上完成再生制動仿真模型的建立及仿真分析過程,通過該模型對駕駛員制動意圖進(jìn)行模擬,完成常規(guī)制動及循環(huán)工況仿真,能夠分析評價不同控制策略,制動指令(由控制系統(tǒng)發(fā)出)向整車動力學(xué)模型直接傳遞,整車滿載質(zhì)量為1 240 kg,蓄電池總電壓為342.4 V、容量為120 Ah。仿真主要參數(shù)設(shè)置,如表2所示[8]。
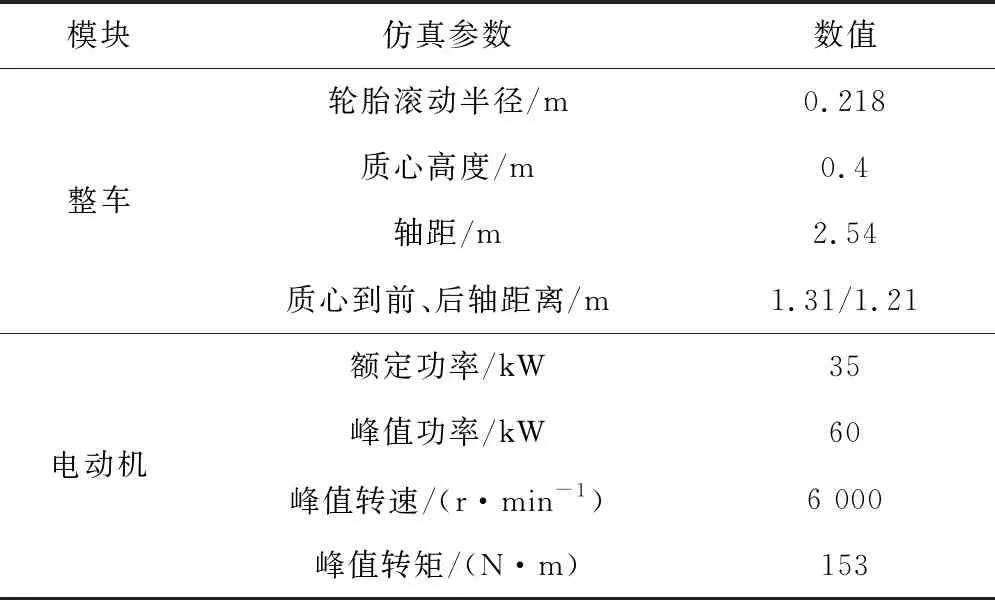
表2 仿真參數(shù)
制動強(qiáng)度在0.15~0.33間波動,再生制動系統(tǒng)參與度同波動的頻繁度成正比,波動越頻繁說明再生制動能量利用率及回收率越高,優(yōu)化后的制動力分配(即制動力變化趨勢),在制動初始時所需制動力(由電動機(jī)單獨提供)較小,軸液壓系統(tǒng)在2.5 s后參與制動,隨后電動機(jī)與液壓系統(tǒng)共同參與以滿足不斷增加的制動力需求,實現(xiàn)能量回收效率最大化(通過最大再生制動轉(zhuǎn)矩狀態(tài)),直到制動穩(wěn)定。優(yōu)化后的再生制動能量回收效果更佳,證明了本文優(yōu)化后控制策略能夠使再生制動能量回收率得以顯著提升。
5 總結(jié)
在回收電動汽車整車制動能量方面,高效的復(fù)合制動系統(tǒng)控制策略會直接影響到回收效率,為此本文主要對制動系統(tǒng)控制策略進(jìn)行了設(shè)計和優(yōu)化,主要優(yōu)化目標(biāo)在于制動性能的穩(wěn)定及較高的能量回收效率,在對多項約束條件進(jìn)行充分考慮的基礎(chǔ)上,通過多目標(biāo)遺傳算法的使用協(xié)同優(yōu)化控制策略中的關(guān)鍵參數(shù),仿真實驗結(jié)果驗證了本文所構(gòu)建的控制策略的有效性,能夠使電動機(jī)制動能量回收優(yōu)勢得以充分發(fā)揮,并有效提高了制動能量的回收效率。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
甘肅教育(2020年14期)2020-09-11 07:57:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
時代英語·高二(2015年1期)2015-03-16 00:08:11