基于蟻群算法的多移動(dòng)機(jī)器人避障路徑規(guī)劃方法
2021-01-29 08:28:34丁艷,畢楊
自動(dòng)化與儀表 2021年1期
丁 艷,畢 楊
(1.漢中職業(yè)技術(shù)學(xué)院 機(jī)電工程系,漢中723000;2.西安航空學(xué)院 電子工程學(xué)院,西安710077)
隨著工業(yè)機(jī)器人的發(fā)展,機(jī)器人的種類越來越廣泛,應(yīng)用范圍也越來越廣[1]。在機(jī)器人的智能控制設(shè)計(jì)中,相關(guān)的多移動(dòng)機(jī)器人避障和路徑規(guī)劃方法研究受到人們的極大關(guān)注[2]。
傳統(tǒng)對(duì)多移動(dòng)機(jī)器人避障路徑規(guī)劃方法主要有粒子群尋優(yōu)法、誤差反饋校正法、末端位置參數(shù)調(diào)節(jié)法等[3-4]。文獻(xiàn)[5]提出未知環(huán)境下機(jī)器人避障及動(dòng)態(tài)目標(biāo)追蹤。在引力公式中加入速度差和加速度差,提高了機(jī)器人動(dòng)態(tài)目標(biāo)追蹤的靈活性和對(duì)環(huán)境的適應(yīng)能力,但其耗時(shí)較長。文獻(xiàn)[6]提出基于混合策略的移動(dòng)機(jī)器人避障算法探究,運(yùn)用矢量場(chǎng)直方圖法結(jié)合神經(jīng)網(wǎng)絡(luò)算法實(shí)現(xiàn)基礎(chǔ)避障,但該方法需要大量樣本訓(xùn)練集,自適應(yīng)能力不強(qiáng)。
故在此提出基于蟻群算法的多移動(dòng)機(jī)器人避障路徑規(guī)劃方法。該方法結(jié)合小擾動(dòng)解析方法進(jìn)行多移動(dòng)機(jī)器人避障網(wǎng)格區(qū)域化匹配,建立尋優(yōu)約束參數(shù), 通過自適應(yīng)蒙特卡洛定位法對(duì)路徑定位,采用蟻群算法尋優(yōu)控制。通過仿真測(cè)試,驗(yàn)證其在提高多移動(dòng)機(jī)器人避障路徑規(guī)劃能力方面的優(yōu)越性能。
1 多移動(dòng)機(jī)器人避障規(guī)劃運(yùn)動(dòng)學(xué)模型及參數(shù)尋優(yōu)
1.1 多移動(dòng)機(jī)器人避障規(guī)劃的運(yùn)動(dòng)學(xué)模型
為實(shí)行多移動(dòng)機(jī)器人避障規(guī)劃的運(yùn)動(dòng)學(xué)規(guī)劃設(shè)計(jì), 構(gòu)建了多移動(dòng)機(jī)器人避障規(guī)劃控制流程,如圖1 所示。

圖1 多移動(dòng)機(jī)器人避障規(guī)劃控制流程Fig.1 Control flow chart of obstacle avoidance planning for multiple mobile robots
在圖1 控制流程的基礎(chǔ)上,結(jié)合小擾動(dòng)解析方法,進(jìn)行多移動(dòng)機(jī)器人路徑規(guī)劃的運(yùn)動(dòng)學(xué)模型構(gòu)建[5]。首先,進(jìn)行多移動(dòng)機(jī)器人避障規(guī)劃的姿態(tài)信息融合,結(jié)合誤差反饋跟蹤調(diào)節(jié)的方法,得到多移動(dòng)機(jī)器人避障路徑規(guī)劃的傳遞函數(shù)為

其中
式中:w(k)為多移動(dòng)機(jī)器人繞體坐標(biāo)系各軸的慣性協(xié)方差矩陣;若w(k)∈L2(0,∞),A,B,C,D 為多移動(dòng)機(jī)器人質(zhì)心分布矩陣參數(shù);n 為控制約束的自變量維數(shù),為正整數(shù);ΔA1,ΔB1為多移動(dòng)機(jī)器人避障穩(wěn)態(tài)誤差增益。
引入多移動(dòng)機(jī)器人的誤差擾動(dòng)項(xiàng),結(jié)合姿態(tài)陀螺儀、加速度計(jì)對(duì)多移動(dòng)機(jī)器人路徑和姿態(tài)采樣結(jié)果,構(gòu)建多移動(dòng)機(jī)器人避障規(guī)劃的控制器。其表達(dá)為

以步態(tài)運(yùn)動(dòng)力學(xué)和阻尼參量為自鎮(zhèn)定性調(diào)節(jié)參數(shù),進(jìn)行線性規(guī)劃設(shè)計(jì)和自適應(yīng)處理,得到參數(shù)融合和信息處理函數(shù)[6]。其表達(dá)為

式中:i 為多移動(dòng)機(jī)器人的模糊度參數(shù);u(x)為多移動(dòng)機(jī)器人路徑空間的測(cè)量矩陣;z(x)為多移動(dòng)機(jī)器人路徑分布空間的末端位姿陣列矩陣;n 為適當(dāng)矩陣維數(shù)。
結(jié)合參數(shù)融合和信息處理結(jié)果,構(gòu)建多移動(dòng)機(jī)器人的運(yùn)動(dòng)學(xué)模型,其表達(dá)為

式中:m 為多移動(dòng)機(jī)器人路徑規(guī)劃的約束狀態(tài)參數(shù)變量。
通過上述分析,得到多移動(dòng)機(jī)器人的運(yùn)動(dòng)學(xué)模型結(jié)果,采用地圖尋優(yōu)方法進(jìn)行多移動(dòng)機(jī)器人避障過程中的網(wǎng)格區(qū)域化匹配,結(jié)合SLAM(simultaneous localization and mapping)算法,進(jìn)行多移動(dòng)機(jī)器人避障參數(shù)尋優(yōu)[7]。
1.2 多移動(dòng)機(jī)器人避障參數(shù)尋優(yōu)
通過構(gòu)建多移動(dòng)機(jī)器人的運(yùn)動(dòng)學(xué)模型,進(jìn)行機(jī)器人避障過程中的網(wǎng)格區(qū)域化匹配,得到多移動(dòng)機(jī)器人的步態(tài)參數(shù)跟蹤模型[8]。其表達(dá)為

式中:(A+B)為運(yùn)動(dòng)學(xué)方程的自變量分布矩陣;F,G分別為多個(gè)蟻群濾波尋優(yōu)參數(shù)和系數(shù);t 為時(shí)間。
基于運(yùn)動(dòng)學(xué)特征分析方法進(jìn)行多移動(dòng)機(jī)器人避障過程中的路徑分布特征變量分析,建立多移動(dòng)機(jī)器人避障路徑分布的尋優(yōu)約束參數(shù), 采用擴(kuò)展SLAM 算法進(jìn)行多移動(dòng)機(jī)器人質(zhì)心加速控制[9],結(jié)合參數(shù)融合,得到避障路徑分布的尋優(yōu)約束參數(shù)模型。其表達(dá)為

式中:Ф1,Ф2為多種機(jī)器人的位置標(biāo)定。
基于運(yùn)動(dòng)學(xué)特征分析方法進(jìn)行多移動(dòng)機(jī)器人避障過程中的路徑分布特征變量分析,通過局部定位,構(gòu)造多移動(dòng)機(jī)器人步進(jìn)跟蹤穩(wěn)態(tài)參數(shù)學(xué)習(xí)模型。其表達(dá)為

式中:ea為多移動(dòng)機(jī)器人路徑規(guī)劃的狀態(tài)特征分布量化參數(shù),且為正整數(shù);q 為跟蹤修正系數(shù)。
分析可知,多移動(dòng)機(jī)器人的路徑規(guī)劃參數(shù)模型分為確定和不確定性兩部分,采用時(shí)延估計(jì)進(jìn)行誤差修正[10],得到采樣特征分布項(xiàng)L2。在多移動(dòng)機(jī)器人質(zhì)心規(guī)劃空間內(nèi),引入多移動(dòng)機(jī)器人路徑的反演規(guī)劃方法,得到多移動(dòng)機(jī)器人路徑的穩(wěn)態(tài)控制參數(shù)變量為

式中:P,R 為多移動(dòng)機(jī)器人路徑分布的實(shí)對(duì)稱矩陣;θi為位姿系數(shù);α 為反演規(guī)劃參數(shù)。
根據(jù)多移動(dòng)機(jī)器人測(cè)量參數(shù),結(jié)合系統(tǒng)的空間增益梯度, 得到多移動(dòng)機(jī)器人避障參數(shù)尋優(yōu)模型。其描述為

式中:lj(k)為多移動(dòng)機(jī)器人路徑規(guī)劃的目標(biāo)狀態(tài);li(k)為多移動(dòng)機(jī)器人路徑規(guī)劃的參數(shù)信息融合矩陣;i,j 為機(jī)器人的位姿信息;Γ(k)為多移動(dòng)機(jī)器人路徑尋優(yōu)參數(shù)。
通過分析,實(shí)現(xiàn)了多移動(dòng)機(jī)器人避障參數(shù)尋優(yōu),以多移動(dòng)機(jī)器人的質(zhì)心參數(shù)為約束對(duì)象,得到多移動(dòng)機(jī)器人路徑空間規(guī)劃模型, 結(jié)合避障參數(shù)尋優(yōu),進(jìn)行避障路徑規(guī)劃[11]。
2 多移動(dòng)機(jī)器人避障路徑優(yōu)化
2.1 多移動(dòng)機(jī)器人避障路徑定位優(yōu)化
通過局部定位和全局跟蹤識(shí)別方法進(jìn)行多移動(dòng)機(jī)器人避障路徑規(guī)劃的障礙物定位優(yōu)化設(shè)計(jì)。采用快速擴(kuò)展隨機(jī)樹RRT(rapidly-exploring random tree)運(yùn)動(dòng)規(guī)劃模型,結(jié)合自適應(yīng)蒙特卡洛定位的方法[13],進(jìn)行多移動(dòng)機(jī)器人避障路徑過程中障礙物定位優(yōu)化。其描述為

其中


式中:θ 為多移動(dòng)機(jī)器人避障目標(biāo)位形矢量?jī)A角;α 為機(jī)器人避障路徑空間分布縱軸(x 軸)與水平面(Oxy 平面)之間的夾角;f(x),f(t)分別為機(jī)器人避障路徑分布的橫向、縱向偏移量;Mz為空間坐標(biāo)系Oxy 上的投影角;z 軸垂直于多移動(dòng)機(jī)器人避障分布狀態(tài)空間坐標(biāo)系Oxy;m 為移動(dòng)機(jī)器人的質(zhì)量。
綜上分析,通過自適應(yīng)蒙特卡洛定位的方法,進(jìn)行多移動(dòng)機(jī)器人避障路徑規(guī)劃過程中的障礙位置準(zhǔn)確定位[14]。
2.2 多移動(dòng)機(jī)器人避障蟻群尋優(yōu)算法
在實(shí)現(xiàn)障礙物精準(zhǔn)定位的基礎(chǔ)上,采用蟻群尋優(yōu)算法進(jìn)行多移動(dòng)機(jī)器人路徑空間規(guī)劃,假設(shè)蟻群的個(gè)數(shù)為N,得到多移動(dòng)機(jī)器人避障路徑規(guī)劃的網(wǎng)格數(shù)為m,每個(gè)螞蟻的信息熵濃度指標(biāo)函數(shù)為

式中:eq為第q 個(gè)蟻群尋優(yōu)算子的最佳路徑空間匹配樣本集;ekq為蟻群尋優(yōu)的模板參數(shù)。
通過多移動(dòng)機(jī)器人避障控制,其中最佳路徑空間匹配樣本集的第k 個(gè)步態(tài)跟蹤融合狀態(tài)分量為τk,由于時(shí)延參數(shù)是確定的,滿足τk=τx+τy+τz,其中τx,τy,τz分別為步態(tài)在x,y,z 軸上的分量。采用反演控制,得到多移動(dòng)機(jī)器人避障的蟻群尋優(yōu)修正向量為

根據(jù)非線性參考模板匹配方法,利用蟻群尋優(yōu)控制的參量量化分布雅可比矩陣,得到蟻群尋優(yōu)的自適應(yīng)迭代步長分布算子為

式中:?為機(jī)器人的阻尼系數(shù)。在多移動(dòng)機(jī)器人避障姿態(tài)校正過程中,受到小擾動(dòng)力矩因素的影響[12],得到多移動(dòng)機(jī)器人避障路徑的蟻群尋優(yōu)路徑為

式中:α 為機(jī)器人避障路徑夾角。根據(jù)多移動(dòng)機(jī)器人步進(jìn)跟蹤的穩(wěn)態(tài)擾動(dòng)與加速度測(cè)量矩陣的關(guān)聯(lián)性,得到多移動(dòng)機(jī)器人避障蟻群尋優(yōu)算法方程式。即

其中

式中:x(0)為多移動(dòng)機(jī)器人避障的初始狀態(tài)均值;P0為其方差。當(dāng)多移動(dòng)機(jī)器人在避障過程中處于非加速運(yùn)動(dòng)狀態(tài)時(shí),通過實(shí)現(xiàn)多移動(dòng)機(jī)器人避障的蟻群尋優(yōu)算法,實(shí)現(xiàn)路徑規(guī)劃優(yōu)化設(shè)計(jì)[15]。
3 仿真測(cè)試分析
為驗(yàn)證所提方法的有效性,進(jìn)行了仿真試驗(yàn)。設(shè)定機(jī)器人路徑規(guī)劃的動(dòng)態(tài)補(bǔ)償系數(shù)為0.34,對(duì)機(jī)器人路徑參數(shù)采樣的傳感器節(jié)點(diǎn)數(shù)設(shè)定為200,姿態(tài)參數(shù)的測(cè)量誤差分別設(shè)定為0.67 mm,0.89 mm 和1.26 mm。多移動(dòng)機(jī)器人路徑分布的初始位置狀態(tài)為

飽和非線性狀態(tài)參數(shù)控制特征量為λ1=1.21,λ2=1.34,c1=2.11,c2=2.25;大幅度的振動(dòng)強(qiáng)度為Q(k)=0.45。
多移動(dòng)機(jī)器人避障路徑規(guī)劃的蟻群尋優(yōu)參數(shù)設(shè)定如下:
連桿的動(dòng)能Kk=0.0508 N·m;
勢(shì)能Kp=0.5732 N·m;
閉環(huán)系統(tǒng)的平衡漸變參數(shù)為

穩(wěn)態(tài)增益控制矩陣為
控制矢量參數(shù)Jp=0.804(1±0.5)kg·m2。
根據(jù)上述仿真環(huán)境和參數(shù)設(shè)定,進(jìn)行多移動(dòng)機(jī)器人避障路徑規(guī)劃仿真,得到多移動(dòng)機(jī)器人避障路徑規(guī)劃的尋優(yōu)參數(shù),尋優(yōu)效果如圖2 所示。

圖2 多移動(dòng)機(jī)器人避障路徑規(guī)劃參數(shù)尋優(yōu)效果Fig.2 Optimization effect of obstacle avoidance path planning parameters for multiple mobile robots
由圖可見,隨著采樣次數(shù)多增加,參數(shù)尋優(yōu)效果逐漸上升,且一直保持在0.7 以上。這主要是因?yàn)樗岱椒▽?duì)多移動(dòng)機(jī)器人的路徑分布特征變量進(jìn)行分析,結(jié)合系統(tǒng)的空間增益梯度,得到多移動(dòng)機(jī)器人避障參數(shù)尋優(yōu)模型,提升了參數(shù)尋優(yōu)效果。
根據(jù)圖2 的參數(shù)解析結(jié)果,進(jìn)行了避障路徑規(guī)劃,得到優(yōu)化的規(guī)劃路徑如圖3 所示。
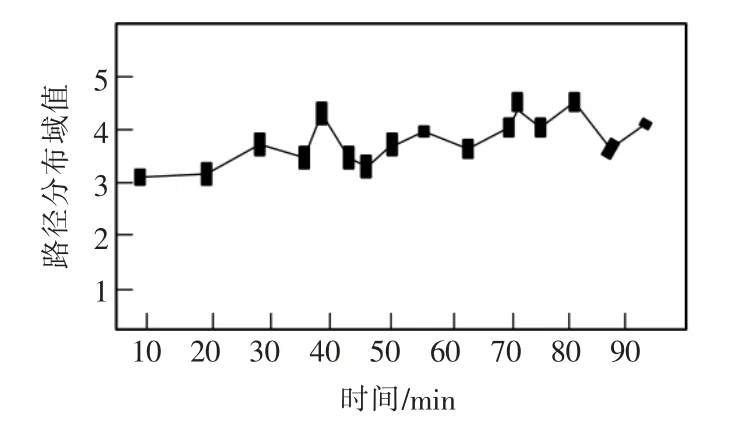
圖3 多移動(dòng)機(jī)器人避障路徑規(guī)劃結(jié)果Fig.3 Obstacle avoidance path planning results of multiple mobile robots
分析圖3 可見,本文方法能夠有效地實(shí)現(xiàn)多移動(dòng)機(jī)器人避障路徑規(guī)劃, 路徑分布閾值穩(wěn)定在3~5之間,變化幅度較小,相鄰單位時(shí)間內(nèi)最大路徑分布閾值差僅為1.2,路徑尋優(yōu)能力較好。這主要是因?yàn)樵趯?shí)現(xiàn)參數(shù)尋優(yōu)的基礎(chǔ)上,采用了蟻群尋優(yōu)算法進(jìn)行多移動(dòng)機(jī)器人路徑空間規(guī)劃,實(shí)現(xiàn)了避障路徑最優(yōu)化。
為測(cè)試路徑規(guī)劃的誤差,分別采用文獻(xiàn)[4]和文獻(xiàn)[5]所提方法進(jìn)行對(duì)比,得到的結(jié)果如圖4 所示。

圖4 多移動(dòng)機(jī)器人避障定位誤差對(duì)比Fig.4 Error comparison of obstacle avoidance and positioning for multiple mobile robots
分析圖4 可見,本文方法進(jìn)行多移動(dòng)機(jī)器人避障路徑規(guī)劃的誤差較低, 且隨著迭代次數(shù)的增加,定位誤差率基本穩(wěn)定。對(duì)比其他方法,本文方法的機(jī)器人路徑規(guī)劃定位精度較高,能夠有效提高多移動(dòng)機(jī)器人避障能力。這主要是因?yàn)樗岱椒ú捎镁植慷ㄎ缓腿指欁R(shí)別方法對(duì)障礙物進(jìn)行定位,提高了定位精度,降低誤差。
4 結(jié)語
本文提出基于蟻群算法的多移動(dòng)機(jī)器人避障路徑規(guī)劃方法。結(jié)合小擾動(dòng)解析方法,構(gòu)建多移動(dòng)機(jī)器人避障規(guī)劃運(yùn)動(dòng)學(xué)模型;采用擴(kuò)展濾波方法進(jìn)行多移動(dòng)機(jī)器人的步態(tài)參數(shù)跟蹤;通過自適應(yīng)蒙特卡洛定位的方法,進(jìn)行多移動(dòng)機(jī)器人避障路徑障礙物精準(zhǔn)定位;采用蟻群尋優(yōu)算法得到蟻群尋優(yōu)控制的參量量化分布矩陣,進(jìn)行多移動(dòng)機(jī)器人路徑空間規(guī)劃。分析得知,本文方法進(jìn)行多移動(dòng)機(jī)器人避障的路徑規(guī)劃能力較好,避障定位誤差較低。對(duì)于多移動(dòng)機(jī)器人避障路徑規(guī)劃具有一定參考價(jià)值。
猜你喜歡
北京航空航天大學(xué)學(xué)報(bào)(2022年6期)2022-07-02 01:59:12
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國海洋大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31