車輛懸架零部件載荷譜提取方法研究
2021-01-29 06:00:46董國疆郎玉玲
振動與沖擊 2021年2期
董國疆,顏 峰,韓 杰,郎玉玲
(1. 燕山大學 河北省特種運載裝備重點實驗室,河北 秦皇島 066004;2. 中信戴卡股份有限公司工程仿真中心,河北 秦皇島 066004)
懸架零部件CAE(Computer Aided Engineering)疲勞耐久性分析的精度和可靠性是以準確的強化路面載荷譜為基礎的[1]。懸架系統零部件連接點結構復雜,作為疲勞耐久性仿真分析所用的激勵信號,即零部件連接點載荷譜,難以通過試驗直接測定,目前較先進的解決方案是實車測試載荷時間歷程信號,再與整車多體動力學仿真運算相結合,獲取零部件連接點載荷譜[2-3]。通過車輛多體動力學仿真獲取懸架零部件載荷譜的方法一般有兩個途徑[4-5]:①路面位移載荷輸入法;②輪心載荷輸入法。路面位移載荷輸入法是將試驗場采集的道路垂向位移信息作為多體模型的輸入,通過多體動力學仿真得到懸架零部件載荷譜。但是路面位移載荷輸入法存在局限性:①部分強化路面建模困難,比如砂石路的垂向位移不明顯且隨機性較大;②路面位移載荷輸入需要多體模型具有高精度的輪胎子系統,但目前關于輪胎模型自身以及其與數字路面的接觸關系的研究尚有許多不足[6-7],是車輛疲勞耐久性測試與分析的主研方向之一。相比之下,輪心載荷輸入法更加便捷且精確,只需采集輪心載荷并作為車輛多體動力學模型輸入激勵,采集車身和懸架關鍵點作為監測信號,從而提取懸架零部件載荷譜,并可評價仿真運算誤差。然而,應用輪心載荷輸入法時,由于試驗車與整車多體動力學模型存在建模誤差,且整車道路實測信號誤差也難以避免[8],若直接采用實測信號加載仿真大都會導致數值奇異或結果失真。解決此問題通常采用約束加載法或虛擬迭代法。約束加載法是在車身被約束的條件下,用實測輪心六分力驅動整車多體動力學模型[9]。Da Cruz等[10]使用比利時路面試驗中測得的輪心六分力數據加載到車身被約束的多體模型中,仿真得到轉向拉桿力和減震器位移等數據,與試驗采集信號對比發現,除初始時間歷程差別較大,總體上仿真與實測吻合度較高;黃元毅等[11]采用試驗場強化路面試驗中測得的輪心六分力信號驅動車身約束模型,提取減震器與車身連接點載荷譜,并與試驗采集信號進行偽損傷對比,結果顯示,吻合度較高。然而,虛擬迭代法解決仿真奇異問題是以迭代計算出的輪心垂向位移代替輪心垂向力,加之其它5個輪心分力,共同驅動仿真模型得到零部件連接點載荷[12-13]。方劍光等[14]以減震器支座垂向加速度和彈簧位移等迭代計算得出輪心垂向位移和其它5個輪心分力,然后以迭代結果驅動模型得到車身與副車架安裝點載荷譜,從仿真獲取的監測信號與實測信號對比來看,提取載荷譜的精度較高。周兵等[15]以六分力傳感器在試驗場強化路面上采集的輪心垂向力為迭代目標,求解得到輪心垂向位移,而后以輪心位移驅動多體模型,得到扭力梁的疲勞載荷譜。綜合來看,輪心載荷輸入法的研究尚有不足之處,主要在于以約束加載法和虛擬迭代法提取載荷譜時選用的試驗工況不夠全面,特別是對于約束加載法和虛擬迭代法獲取零部件載荷譜技術路徑的適用性和優劣特征尚未全面檢驗和評估。
本文基于實車強化路面和室內振動臺架測試,以整車多體動力學模型提取懸架零部件載荷譜為線索,探討在多種工況下約束加載和虛擬迭代獲取零部件載荷譜技術路徑的適用條件和技術特征,以期為車輛懸架零部件的開發和測試提供參考依據。
1 臺架與試驗場動態載荷譜采集
試驗采集信號包括激勵信號和監測信號,如表1所示。激勵信號為四輪輪心六分力,用于整車多體動力學仿真模型的驅動輸入;監測信號包括軸頭垂向加速度、彈簧位移和減震器上支點加速度等,用于仿真模型對標,以及對提取載荷譜的精確度評估。
試驗車輛選用某緊湊型SUV(前麥弗遜,后雙橫臂,整備質量1 531 kg)和某中級轎車(前麥弗遜,后多連桿,整備質量1 569 kg),根據測試需求設計傳感器布置和信號采集方案,如圖1所示。
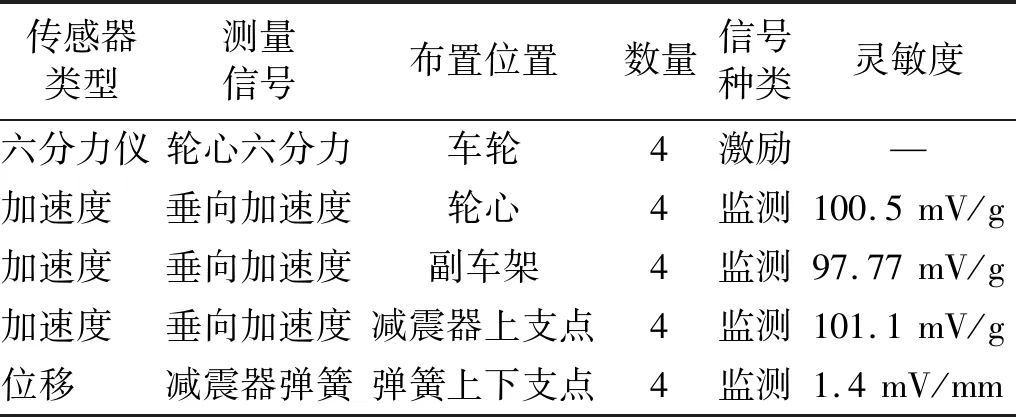
表1 數據采集傳感器種類表

圖1 傳感器布置圖Fig.1 Sensor layout
信號采集包括室內振動臺與試驗場強化路,在每次信號采集前需校驗傳感器且清零處理,如六分力儀信號清零需將整車支撐使車輪離地,否則會丟失車重。采集頻率設為1 000 Hz,每組測試重復5次。由于數采設備受溫度變化、電波干擾等影響,導致實測信號存在毛刺、雜波和飄移等問題,需將原始信號進行去漂流、去毛刺和濾波等處理。處理后的試驗場強化路實測信號如圖2所示。

圖2 試驗場工況輪心垂向力FzFig.2 Fz of wheel centers under proving ground
2 建模與載荷譜提取
2.1 整車模型建立
車輛懸架零部件載荷譜提取需借助整車多體模型,建模精度主要取決于整車參數測定和部件關聯設置。本文基于ADAMS/car平臺搭建整車剛柔耦合動力學模型,相關參數均實測獲取。
2.1.1 底盤參數獲取
多體動力學模型中的基本單元是part(零部件),其參數包括質量、轉動慣量和質心位置等。本文通過3D掃描儀獲取底盤整體和所有零部件的點云,應用CATIA軟件逆向建模,并根據底盤實際結構和定位點云建立整車懸架裝配模型,以裝配坐標為參考測定零部件的質量、轉動慣量、質心位置和硬點坐標,如圖3和圖4所示。幾何參數測定完成,將拆裝零部件重新裝配后進行四輪定位,并確定車輪定位參數。
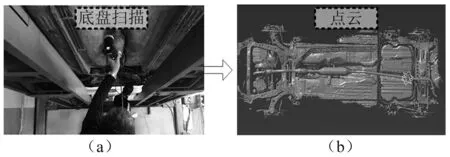
圖3 硬點參數獲取圖Fig.3 Hard point parameter acquisition graph
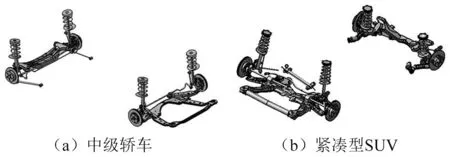
圖4 整車懸架模型Fig.4 Vehicle suspension model
2.1.2 襯套參數獲取
懸架系統中各部件通過各種運動副與襯套連接,而襯套的剛度特性對部件間運動傳遞具有較大的影響。多體動力學模型中襯套參數設置包括6條剛度曲線,即三向線剛度和三向扭轉剛度,通過MTS試驗臺測定。測試基本原理:對襯套方向軸施加一定的力或力矩,測量襯套的變形量,繪制力-位移曲線并確定擬合函數,從而獲取襯套的剛度阻尼曲線。SUV試驗車包含42個襯套,中級轎車包含34個襯套,其中擺臂與副車架前連接點襯套剛度曲線,如圖5所示。
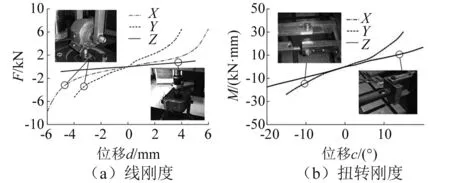
圖5 襯套線剛度曲線Fig.5 Bushing stiffness
整車空載和滿載工況質心位置和軸荷質量分配通過靜態稱重試驗測定。依據實測整車參數,基于ADAMS/car軟件創建包括前懸架、后懸架、前穩定桿(柔性體)、后穩定桿(柔性體)、轉向機構、動力總成和車身等子系統,在標準模式下對各個子系統進行裝配,生成整車剛柔耦合動力學模型如圖6所示。穩定桿為柔性體,采用3D掃描逆向建模后,在HyperMesh中建立有限元模型并生成.mnf模態中性文件,再引入ADAMS整車模型。仿真激勵作用在軸頭,因此無需添加輪胎子系統。模型建立后,在對整車進行靜載仿真檢驗,求解輪載與實測比對,從而對質心位置等建模參數進行修正。
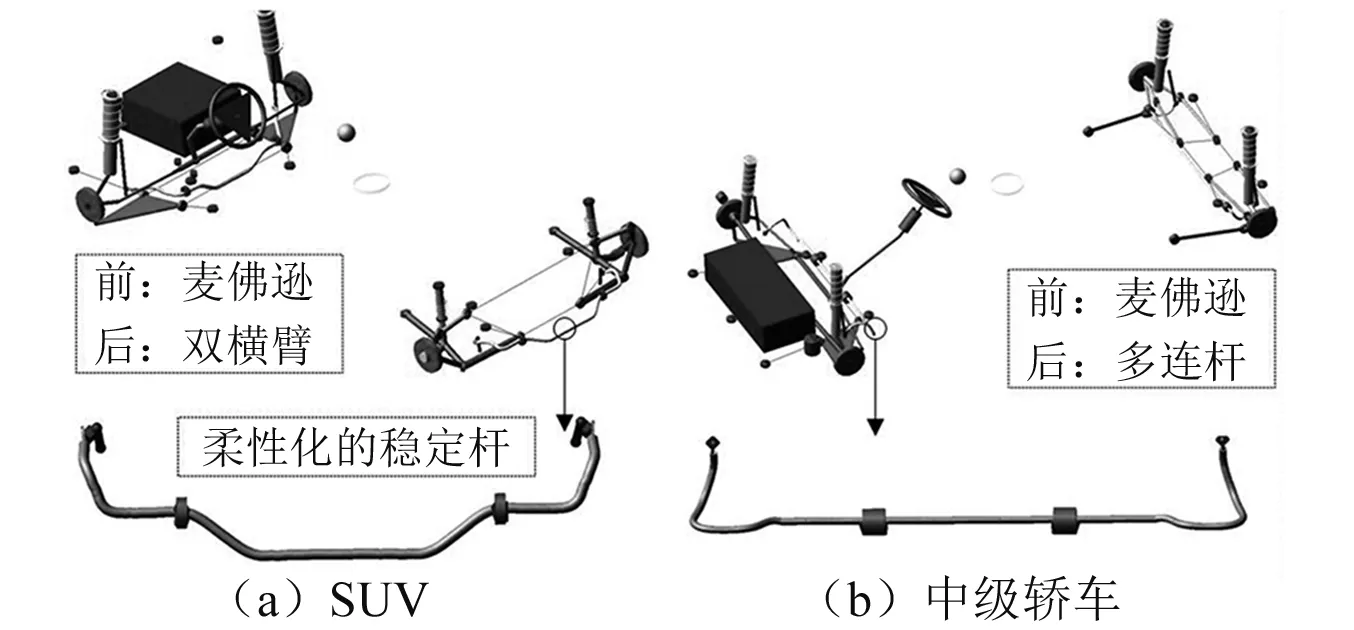
圖6 試驗車剛柔耦合多體動力學模型Fig.6 Rigid-flexible coupled multi-body dynamic model
2.2 零部件載荷譜提取
2.2.1 虛擬迭代法
虛擬迭代法解決仿真奇異是以輪心垂向位移代替輪心垂向力,加之其它5個輪心分力,共同驅動模型得到零部件載荷譜。虛擬迭代法提取零部件載荷譜需ADAMS與Femfat.lab聯合仿真,在Femfat.lab中調用整車剛柔耦合模型的.adm文件,該文件由ADAMS輸出且包含整車參數信息。在Femfat.lab中以白噪聲為激勵信號驅動模型獲得模型響應參量,從而求出模型系統的逆傳遞函數;而后以實測輪心六分力為Output響應,迭代求解模型四輪輪心處X,Y,Z向力矩與X,Y向力,以及Z向位移;再以迭代求解的輪心分力和Z向位移驅動模型,獲取監測點響應數據,及提取零部件連接點載荷。
虛擬迭代是一種已知響應反求激勵的方法。求解首先根據激勵與響應信號的類型生成白噪聲,以此白噪聲作為激勵信號u0,驅動多體動力學模型得到初始響應信號y0,即求得傳遞函數f(s)=y0/u0及逆函數f-1(s),后以實測響應信號yd(s)為迭代運算的目標信號,通過f-1(s)可求初始激勵信號u1(s)[16-17],即
u1(s)=f-1(s)yd(s)
(1)
由于動力學模型高度非線性,即傳遞函數非線性,因此求解的激勵信號不唯一,需使用牛頓—拉斐遜算法通過式(2)迭代求解激勵信號
uk+1(s)=uk(s)+f-1(s)(yd(s)-yk(s))
k=1,2,3,…,n-1
(2)
式中:yk(s)為第k次激勵信號uk(s)迭代得到的響應信號;n為迭代次數。計算yk(s)與迭代目標信號yd(s)的均方根值(Root Mean Square,RMS)或偽損傷值Damage,當二者RMS值相對誤差小于0.2或Damage比值趨近于1時,即迭代運算精度可滿足設計要求。由于整車系統響應過程復雜,因此迭代計算比較耗時。
2.2.2 約束加載法
基本思路是將車身與地面固定約束,以此抑制仿真運算出現模型傾覆的發散性問題。車身與地面固定約束導致簧上質量對懸架振動響應失效,但減震器上支點對簧下部分的約束依然存在,所以仿真結果仍具有一定的適用性。相比虛擬迭代法,應用約束加載法提取連接點載荷譜的運算成本至少低70%。
約束加載法與虛擬迭代法仿真模型的整車參數設置相同,不同在于輪心激勵方式和車身約束條件,即輪心激勵設置為作動器施加實測六分力信號,假設車身與地面連接為固定約束。設置的作動器子系統中包含兩個無質量part,且采用固定副彼此約束,其中一個part與車身匹配建立完整的通信器,另一個僅設置輸入通信器,無需匹配輸出通信器,如此,輸入通信器與地面相連間接構建車身固定約束。
相對于虛擬迭代法,約束加載法提取載荷譜要簡單省時很多。將實測輪心六分力信號經過低通濾波與512 Hz重采樣處理后,分別施加到模型輪心對應位置,運算即可求解零件連接點載荷譜。實測六分力信號不可采用帶通或高通濾波,否則會直接去除車重對六分力的影響。
3 虛擬迭代法與約束加載法對比
虛擬迭代法和約束加載法運算效果分析主要通過監測信號的誤差評估以及載荷譜的對比。監測信號包括輪心、減震器上支點和副車架三個監測點的垂向加速度,以及一個彈簧位移,監測點實測信號與仿真響應信號一一對應,以此評判零部件載荷譜的提取精度。本文分別采用虛擬迭代法與約束加載法提取試驗車輛轉向節載荷譜,針對室內振動臺和試驗場強化路兩類工況進行仿真數據與實測信號的對比分析。
3.1 室內振動臺工況監測信號分析
室內振動臺試驗設計了5種典型的振動工況,如表2所示。將虛擬迭代法和約束加載法仿真獲取的監測信號與實測值在時域對比,如圖7和圖8所示。為便于量化評估分析,計算出SUV試驗車振動臺工況下兩種仿真結果和試驗采集信號的RMS值,并給出仿真相對試驗信號的誤差,如表3所示。

表2 振動臺試驗工況匯總表

圖7 振動臺工況SUV左前輪心加速度Fig.7 Acceleration of left front wheel center of SUV

圖8 振動臺工況SUV右前彈簧位移Fig.8 Right front spring displacement of SUV
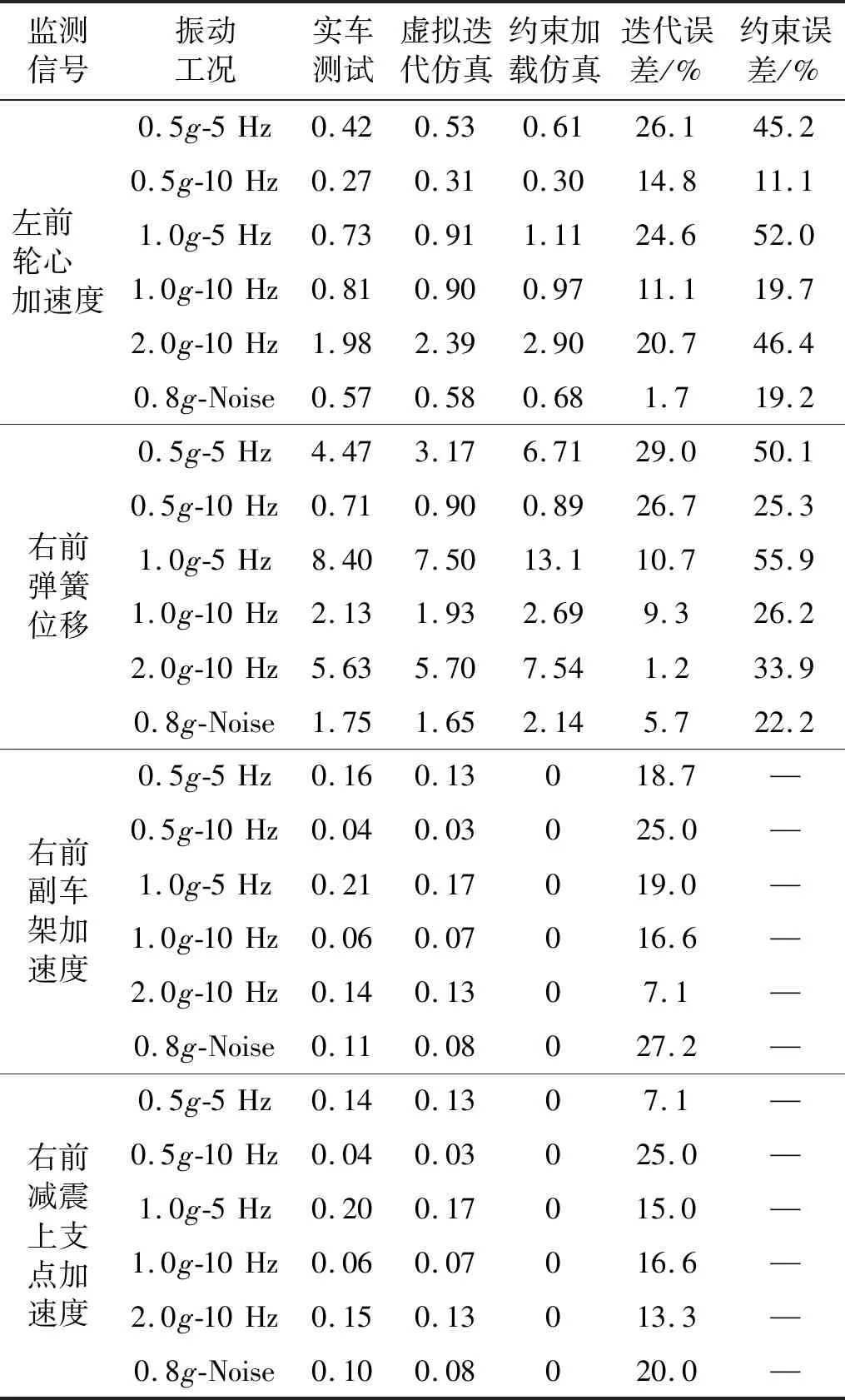
表3 振動臺工況SUV監測點試驗與仿真信號的RMS值表
在振動臺工況下,虛擬迭代法和約束加載法獲取的監測點仿真與實測信號時域曲線變化趨勢基本一致,虛擬迭代與實測曲線重合度更高,如圖7和圖8所示。表3統計數據表明,6種振動臺工況下SUV試驗車左前輪心垂向加速度的虛擬迭代仿真與實測信號誤差小于26.2%;右前彈簧位移仿真誤差小于29.1%;右前副車架垂向加速度和右前減震器上支點垂向加速度的仿真誤差均小于27.3%,即虛擬迭代法對監測信號仿真誤差統計均小于30%,符合工程領域內疲勞耐久性分析和試驗的基本要求。
約束加載法中車身與地面固定約束,因此減震器上支點和副車架垂向加速度均為0。為了更直觀的分析振動臺各工況下約束加載法的仿真誤差,由表3部分數據制作了仿真誤差柱狀圖,如圖9所示。從圖9可知,約束加載法對于高頻低幅工況的仿真較為精確,而對于低頻高幅工況的仿真誤差均超過了45%。從0.8g白噪聲的仿真結果也可證明此現象,0.8g白噪聲的功率譜密度是均勻分布在0~30 Hz頻域內,幅值有效值約為0.8g,屬于高頻低幅工況,其左前輪心加速度和右前彈簧位移的約束加載法仿真誤差均小于22.2%。同時,對中型轎車的臺架振動工況試驗和仿真也呈現同樣的現象,如圖10所示。
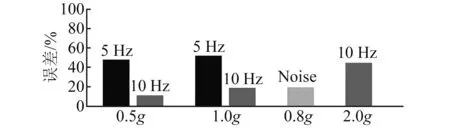
圖9 SUV左前輪心垂向加速度仿真誤差對比Fig.9 Comparison of vertical acceleration errors of SUV left front wheel center
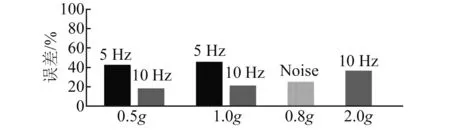
圖10 中級轎車左前輪心垂向加速度仿真誤差對比Fig.10 Comparison of vertical acceleration errors of middle class left front wheel center
因此,室內臺架振動試驗和仿真分析表明,約束加載法由于忽略了簧上質量對懸架振動的響應作用,僅適用于高頻低幅的振動工況;相比約束加載法,虛擬迭代法的適用性更寬,對于各種振動工況的仿真精確度均較高。
3.2 試驗場強化路工況監測信號分析
使用虛擬迭代和約束加載兩種方法,對SUV和中級轎車的搓板路和長波路測試工況進行整車剛柔耦合模型動力學仿真,并與實測信號對比分析。試驗車部分監測信號仿真與實測時域曲線對比如圖11和圖12所示。RMS值及其誤差統計如表4和表5所示。
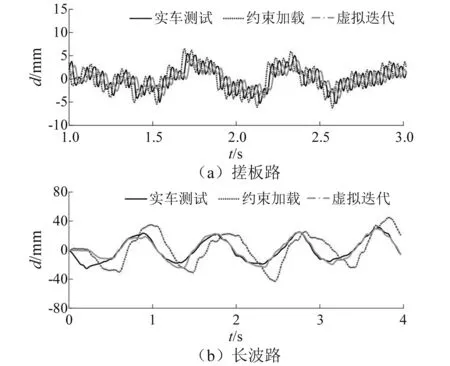
圖11 試驗場工況SUV右前彈簧位移Fig.11 Right front spring displacement of SUV
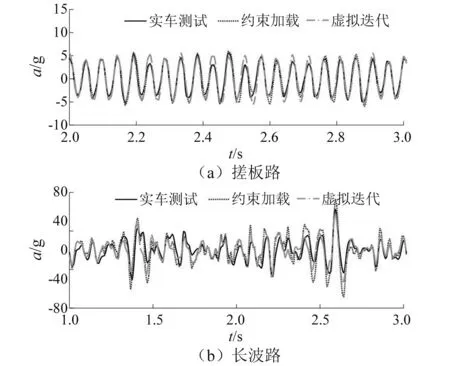
圖12 試驗場工況中級轎車左前輪心加速度Fig.12 Acceleration of left front wheel center of middle class
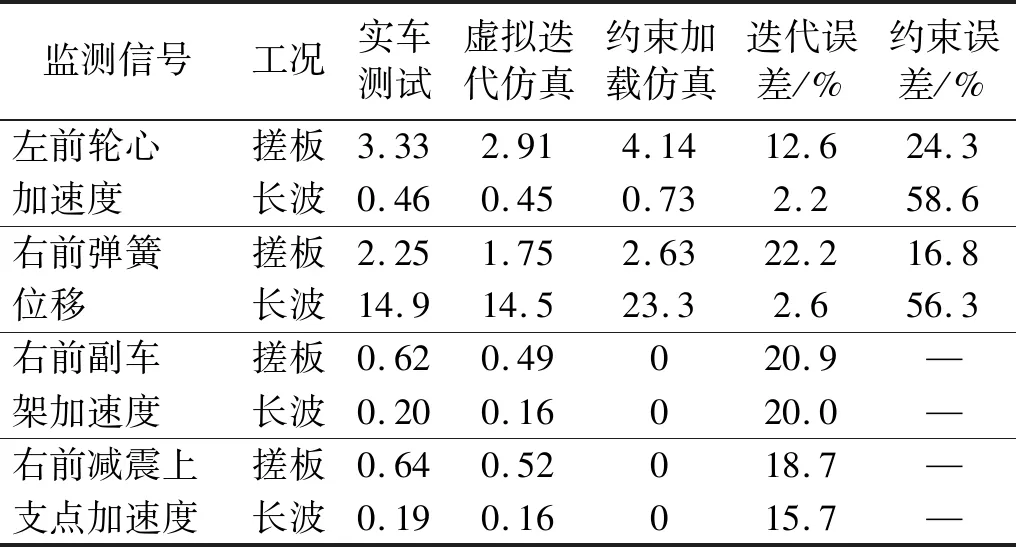
表4 SUV強化路監測點試驗與仿真信號RMS值表
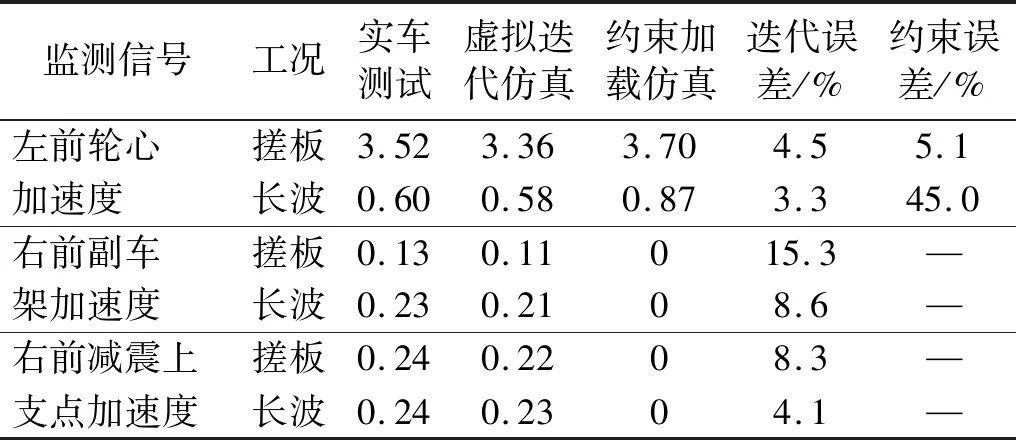
表5 轎車強化路監測點試驗與仿真信號RMS值表
搓板路和長波路是交通部公路交通試驗場兩種典型強化路況,其中試驗車以標準車速50 km/h通過搓板路時懸架振動的主頻約為22 Hz、彈簧位移約為3 mm,屬于高頻低幅工況;以標準車速50 km/h通過長波路振動的主頻約為1 Hz,彈簧位移約為14 mm,屬于低頻高幅工況。由圖11和圖12可知,在兩種強化路況下虛擬迭代法和約束加載法獲取的監測點仿真與實測時域曲線變化趨勢相近,虛擬迭代法較約束加載法吻合度更高。表4和表5的統計數據顯示,虛擬迭代法對于兩種類型試驗車的輪心、副車架和減震器上支點加速度信號,以及減震彈簧位移信號,4處監測點的仿真誤差均小于22.3%。然而,約束加載法僅在高頻低幅的搓板路工況中仿真誤差小于30%,對于低頻高幅的長波路工況仿真誤差較大;同時,由于固定約束條件的限制,約束加載法無法獲取車身監測點的仿真數值。因此,試驗場典型強化路試驗與仿真分析顯示,約束加載法僅適用于高頻低幅類型的強化路面仿真,并僅可獲取車輛簧下零部件的動力學仿真信息。
3.3 試驗場強化路工況載荷譜分析
底盤零部件載荷譜一般是整車動力學仿真的主要目標需求。本文采用兩種方法提取的搓板路和長波路工況下轉向節與減震器連接點載荷譜進行比較分析,其中SUV試驗車載荷譜時域曲線對比,如圖13所示。中級轎車轉向節連接點載荷譜時域曲線對比,如圖14所示。零部件連接點載荷譜多用于疲勞壽命仿真分析和試驗驗證,可通過載荷譜偽損傷量值進行對比分析。偽損傷并非真實損傷,而是反應載荷譜之間相對損傷效果的強弱,表6和表7分別給出了虛擬迭代和約束加載兩種方法提取強化道路載荷譜的偽損傷量值。
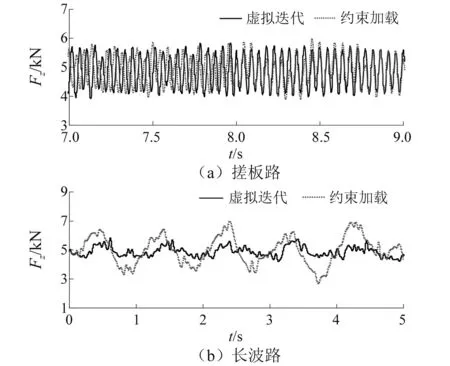
圖13 SUV左前轉向節與減震器連接點FzFig.13 Connection point Fz between left front steering knuckle and shock absorber of SUV
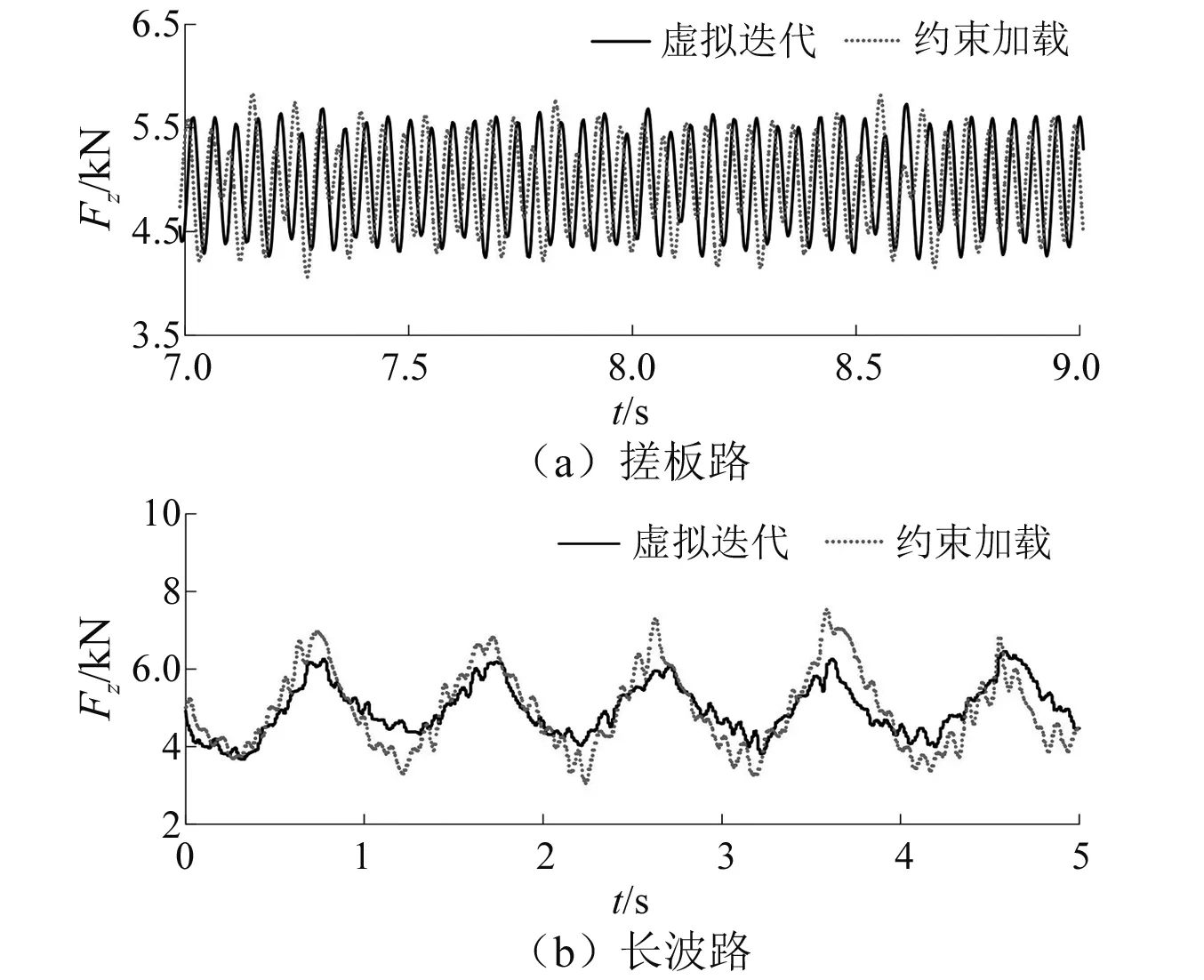
圖14 中級轎車左前轉向節與減震器連接點FzFig.14 Connection point Fz between left front steering knuckle and shock absorber of middle class
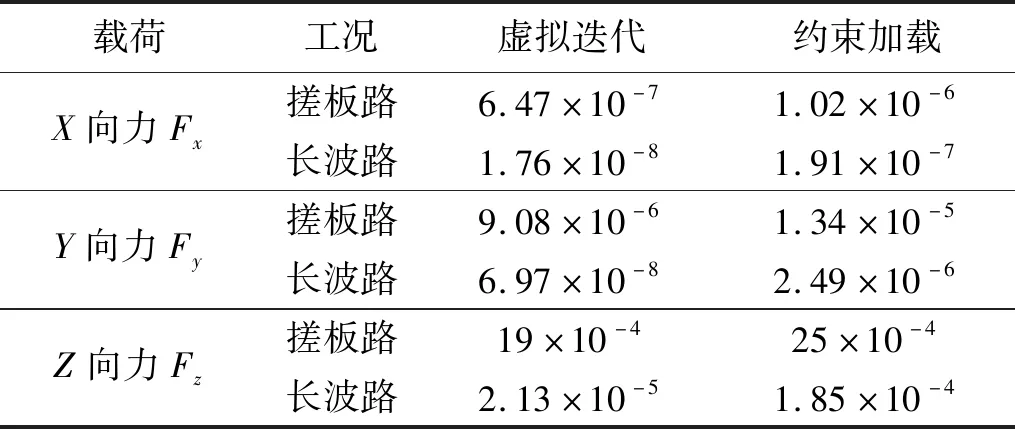
表6 SUV強化路況左前轉向節與減震器連接點載荷譜仿真值的偽損傷統計表Tab.6 Pseudo-damage of load spectrum of connection point between left front steering knuckle and shock absorber of SUV
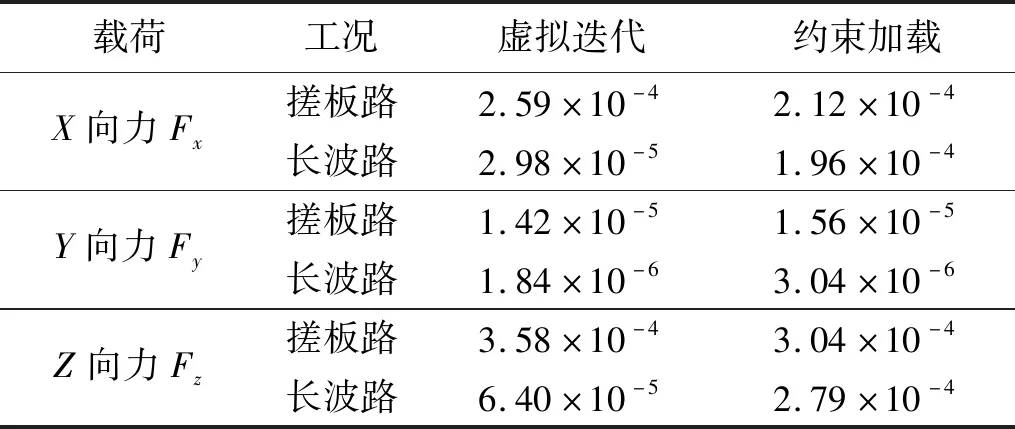
表7 中級轎車強化路況左前轉向節與減震器連接點載荷譜仿真值的偽損傷統計表Tab.7 Pseudo-damage of load spectrum of connection point between left front steering knuckle and shock absorber of middle class
基于SUV和中型轎車的強化路況仿真結果來看,高頻低幅類型的搓板路況下虛擬迭代法和約束加載法提取的轉向節載荷譜時域曲線趨勢較為吻合,同時偽損傷值也非常接近;然而,對于低頻高幅類型的長波路況,兩種仿真方法提取的載荷譜時域和偽損傷值均相差較大。整體來看約束加載法提取的載荷譜較虛擬迭代法提取的載荷譜大。通過前文對兩試驗車監測信號的對比分析可知,對于高頻低幅的搓板路況兩種方法的監測點仿真誤差均小于30%,而對于低頻高幅的長波路況僅有虛擬迭代法的監測點仿真誤差滿足設計要求。由此可以判定,虛擬迭代法提取的兩種車型轉向節載荷譜更接近真實值。
3.4 載荷譜疲勞分析驗證
分別以虛擬迭代法和約束加載法提取的SUV轉向節強化路載荷譜為基礎,在nCode疲勞分析軟件中對其進行耐久性分析,兩種載荷譜計算得出的轉向節壽命云圖,如圖15所示。從圖15可知,除D區外約束加載法提取的載荷譜分析得出的轉向節易損區與虛擬迭代法提取的載荷譜分析得出的易損區基本重合。兩種載荷譜分析的易損區中B區同為最大損傷區,決定了轉向節的最小疲勞壽命,虛擬迭代法提取的載荷譜分析的轉向節疲勞壽命為試驗場強化路循環1.840×104次,約束加載法提取的載荷譜分析的疲勞壽命為1.227×104次,因此可以說明用約束加載法提取的載荷譜分析零部件疲勞壽命較虛擬迭代法保守。
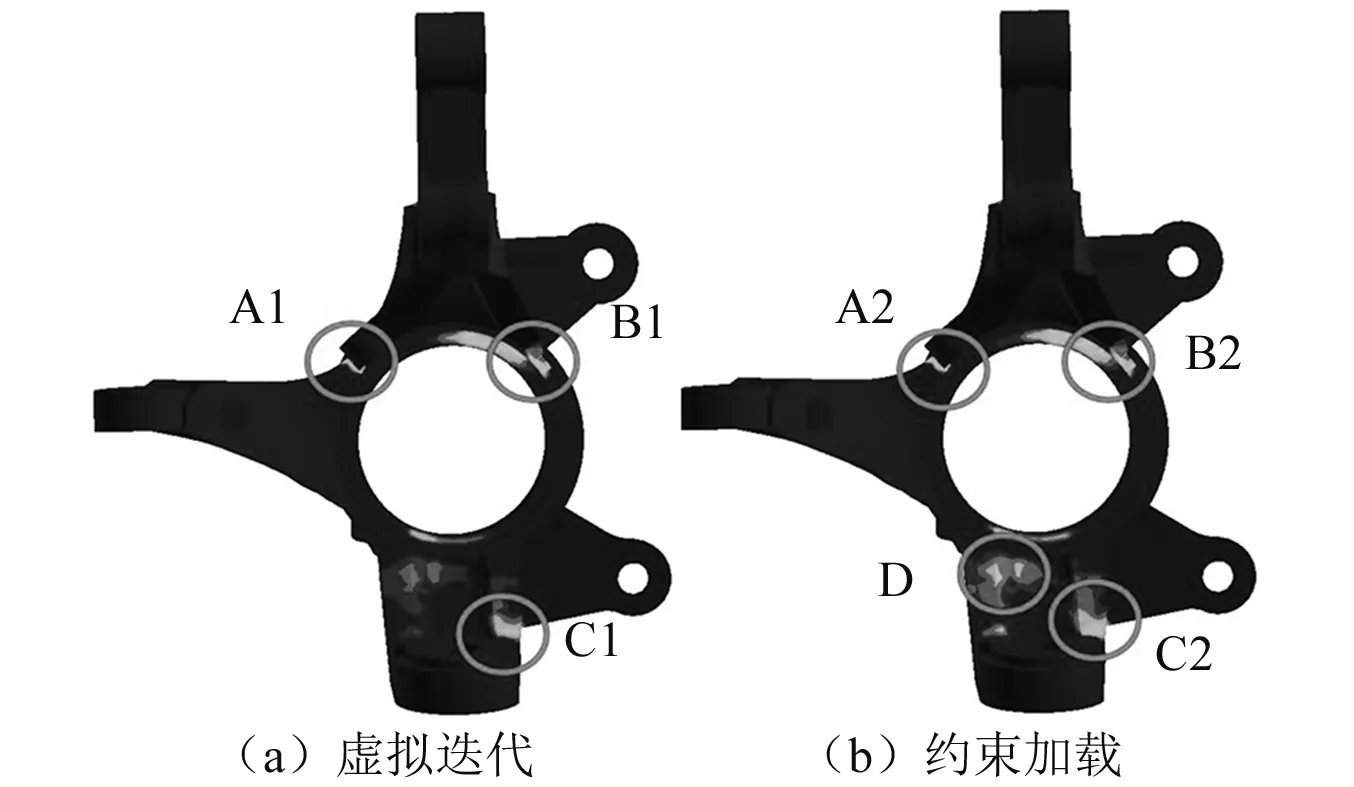
圖15 SUV轉向節疲勞壽命對比Fig.15 Fatigue life comparison of SUV steering knuckle
4 結 論
(1) 基于兩種典型試驗車輛,開展室內臺架多工況整車振動試驗與仿真,分別將虛擬迭代法和約束加載法獲取的車輛監測點加速度、位移等信號與實測值對比分析表明,約束加載法對于高頻低幅工況的仿真較為精確,而對于低頻高幅工況的仿真誤差均大于45%;相比之下,虛擬迭代法對6種典型振動工況的仿真誤差均小于30%,具有更好的適用性和仿真精度,但運算成本較高。
(2) 試驗場典型強化路況實車測試與動力學仿真分析顯示,虛擬迭代法和約束加載法在監測點的仿真數值與實測曲線變化趨勢基本一致,虛擬迭代法吻合度更高,監測點仿真誤差均小于22.3%;約束加載法僅在高頻低幅的搓板路況仿真誤差小于30%,對于低頻高幅的長波路況誤差較大。約束加載法僅適用于高頻低幅強化路的車輛簧下零部件動力學仿真。
(3) 對于試驗場強化路況下兩種試驗車轉向節載荷譜對比分析表明,在高譜低幅的搓板路況下,虛擬迭代法和約束加載法提取的轉向節載荷譜時域曲線變化趨勢和偽損傷值均較接近;而在低譜高幅的長波路況下,兩種方法提取數值相差較大,且約束加載法提取的載荷譜分析出的轉向節疲勞壽命較虛擬迭代法保守。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03