潤濕性表面液滴導向運動的研究進展
2021-02-03 08:59:40盧志成鄭佳宜余延順
表面技術 2021年1期
盧志成,鄭佳宜,余延順
(南京理工大學 能源與動力工程學院 電子設備熱控制工業和 信息化部重點實驗室,南京 210094)
液滴與固體表面之間的界面作用形式多種多樣,有碰撞、反彈、潤濕等[1-2]。其中,液滴因界面特性、自重力或其他外力作用的引導,而沿著某一方向的運動被稱為“導向運動”。這種現象在自然界十分普遍,如沙漠甲蟲通過背部疏/親水表面捕水輸水[3-4]、豬籠草的多尺度結構表面連續導向運輸所需的水滴[5-7]、仙人掌莖上的霧收集系統[8-10]等。在沒有外部能量輸入下,大多數液滴的導向運動都是依靠固體表面的特性。因此,理解固體表面的特性對于實現液滴的導向運動是非常關鍵的。
潤濕性是固液接觸界面的一個重要特性。它是固體表面從固-氣接觸界面向固-液接觸界面轉移的一種現象,是液滴可以在固體界面上鋪展的能力[11]。表面潤濕性可用界面接觸角表征,如圖1 所示。液滴與潤濕性表面接觸角>150°,同時滾動角<10°,該表面即為超疏水表面;接觸角在90°~150°之間,即為疏水表面;接觸角<90°,即為親水表面。超疏水表面由于其優良的防水防污[12]、耐腐蝕[13]、抗結冰[14]、強化冷凝傳熱[15-16]等性能受到人們的青睞。微納米粗糙結構和低表面能的構造是超疏水表面制備的關鍵。隨著化工技術和微納米技術的發展,研究熱點正從單一的均勻潤濕性表面向非均勻的特殊潤濕表面轉移。最新研究表明,非均勻潤濕表面對液滴存在“力矩”[17],它能改變液滴的運動軌跡即存在導向作用,而該特征與很多實際應用相關。例如化學合成反應中,不同種類流體會由于導向作用自發移動合并[6];在淡水收集領域,運用表面的潤濕性差異對液滴自發導向作用的物理性質,為進一步提高淡水收集運輸效率提供了新思路[3-10];在傳熱領域,換熱裝置的鋁、銅和不銹鋼具有天然親水性,這種親水性使這些材料難以有效排水,導致冷凝水滯留量增加。因此,在傳熱和空氣處理表面上的水滴管理和控制,對于系統的整體能效、功能維護有著至關重要的作用[18]。這些實際應用涉及的液滴運輸技術近年來取得了迅速的發展,尤其對于潤濕性表面上的液滴運輸技術。因此,有必要對潤濕性表面上液滴導向運動的研究進行綜述,歸納不同潤濕性表面涉及的不同驅動力對液滴導向運動的影響,從而便于對該過程中的力學機制展開更深入的研究。
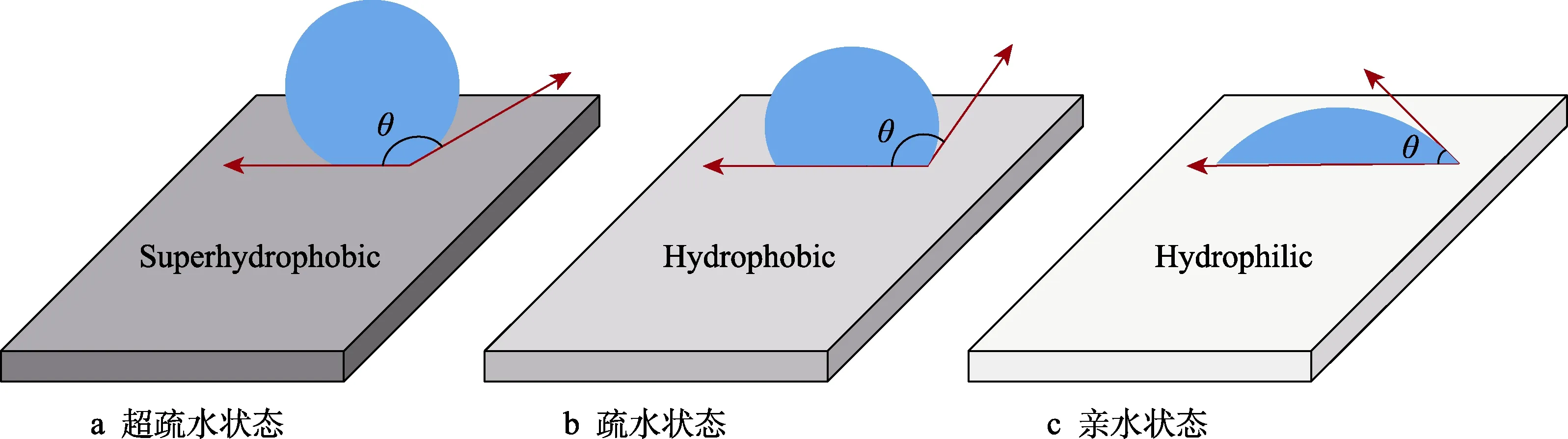
圖1 具有不同接觸角的表面狀態 Fig.1 Surface state with different contact angles: (a) superhydrophobic state, (b) hydrophobic state, (c) hydrophilic state
本文首先介紹關于液固接觸和液滴運動的基本理論,然后按不同的液滴運輸技術進行了系統綜述,最后對各種液滴運輸技術以及未來的研究和應用方向進行了總結與展望,提出了對潤濕性表面上液滴做曲線運動過程中深入到離心力、表面張力等力學特性的研究和耦合多外場結合固體潤濕性表面的優化設計,來控制多液滴實現精準導向運輸的方向。
1 基本理論
1.1 液固接觸
潤濕性和潤濕過程與表面形態密切相關,液滴的形狀取決于固-液-氣三相界面[11]。如圖2a—c 所示,液滴在固體表面上的潤濕行為可分別用Young 模型[19]、Wenzel 模型[20]、Cassie 模型[21]來描述。平衡接觸角用Young 方程描述為:

式中:θY是Young 模型的平衡接觸角,γsg、γsl、γlg分別是固-氣、固-液、液-氣界面張力。但是,Young模型里的固體表面是理想狀態下的均勻、光滑、無限平坦的剛性固體表面。
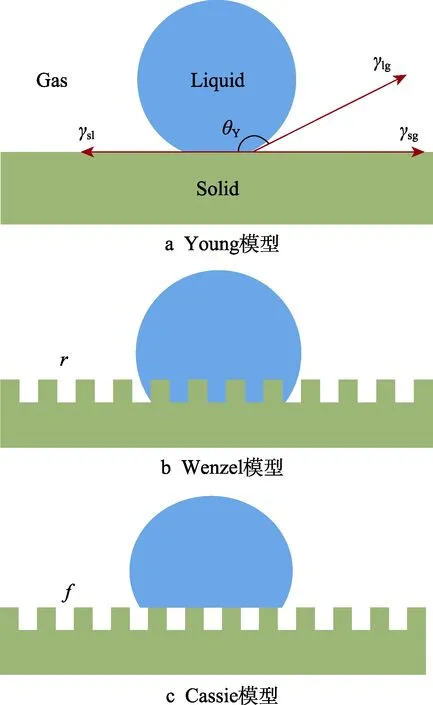
圖2 液滴在不同固體表面的潤濕狀態 Fig.2 Wetting state of droplets on different solid surfaces: (a) Young model; (b) Wenzel model; (c) Cassie model
在表面粗糙的情況下,Wenzel 模型和Cassie 模型的接觸角可分別用式(2)和式(3)表示。

式中:θw為Wenzel 表觀接觸角,r為粗糙表面的實際面積與表觀幾何面積之比,θc為Cassie 表觀接觸角,f為單位面積內固-液界面接觸面積與實際表面積之比。
1.2 液滴運動
基于方程(1)—(3),粗糙度可以增加表面的疏水性或親水性。因此,通過改變接觸界面的粗糙度,可以制備出表面無化學成分差異的非均勻潤濕表面。它對液滴可產生界面不平衡力,一旦液滴前后所受界面力不能平衡,液滴就會向特定的方向運動,即進行導向運動,如圖3a、b 所示。該界面不平衡力即潤濕梯度驅動力可結合式(1)推導得出[22],可用式(4)表示。

式中:R是液滴與界面接觸的基半徑,θA和θB分別表示液滴在潤濕梯度前后兩側的接觸角,φ表示圖3b 中顯示的極角。
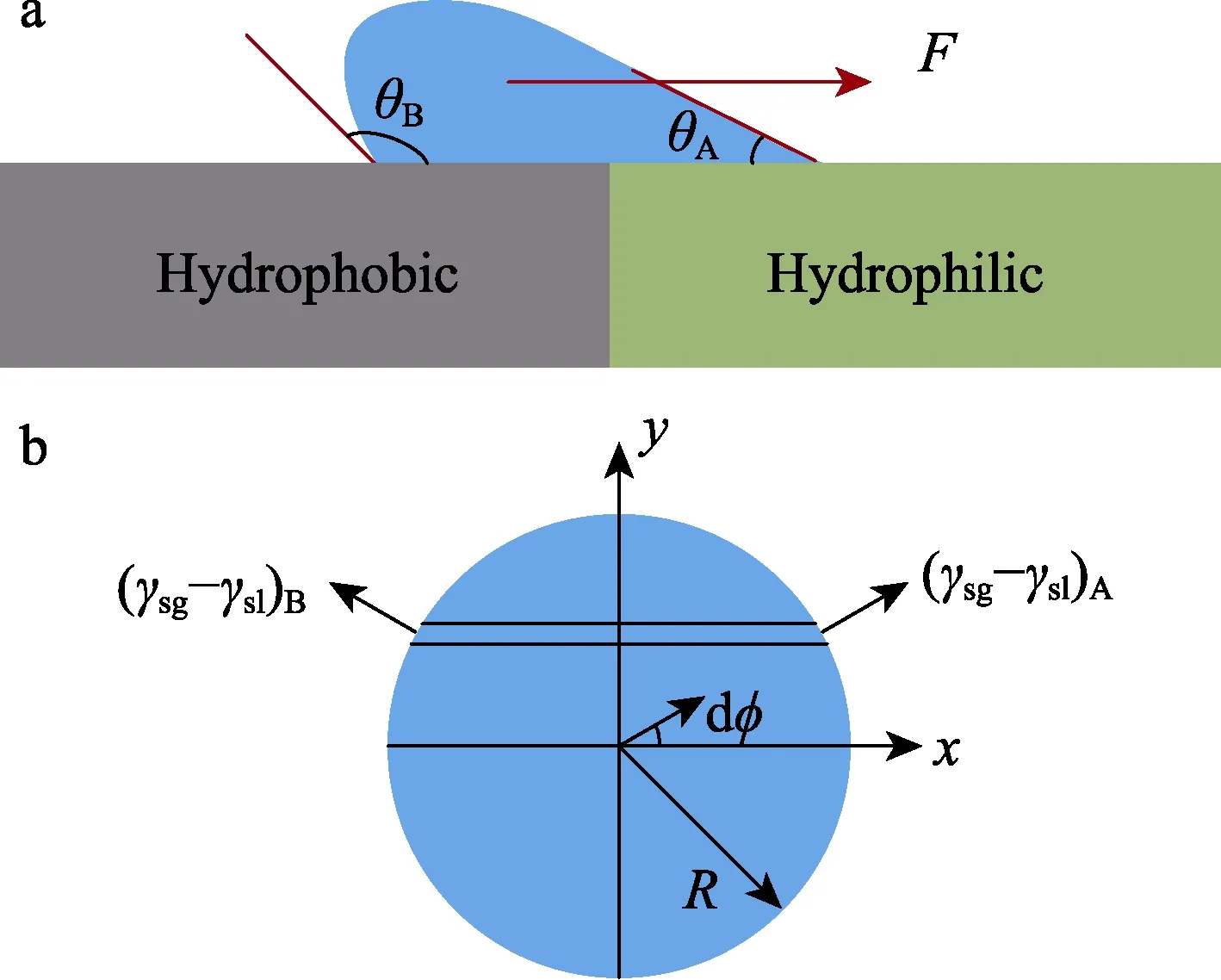
圖3 液滴所受驅動力 Fig.3 Driving force on droplet
在大多數情況下,由于表面的不均勻性,低黏度液滴的運動會受到阻力的影響。由接觸角滯后(液滴前進接觸角和后退接觸角之差)引起的阻力[23]可表示為:

式中:θadv和θres分別表示液滴的動態前進接觸角和后退接觸角。因此,較小的接觸角滯后更有利于液滴的導向運動。
針對非均勻潤濕表面上液滴運動阻力的確定,部分學者有不同的觀點。根據局部滑移流體動力邊界條件,阻力還可以寫為[24]:

式中:λ為摩擦系數,A為潤濕表面上液滴的總接觸面積,v為液體的運動速度。λ與液體的黏度密切相關,傳統定義為覆蓋整個固體表面的區域。對于非均勻潤濕表面,液滴與固體表面相互作用的摩擦系數依賴于表面不一樣的潤濕性,從而會對液滴產生不同的阻力效應。
利用上述基本理論,可以從力學角度理解許多關于液滴導向運動的現象。從理論角度深入理解這些現象,將有助于學者把研究成果應用于實際的工業領域。
2 潤濕梯度表面驅動的導向運動
2.1 理論探索與數值研究
水滴在潤濕梯度表面上會自發地向更易潤濕(更親水)的區域運動。此液滴運動機制最早由Greenspan[25]和Brochard[26]提出,并通過各自的假設條件和簡化模型,得出潤濕梯度表面上液滴運動的速度。事實上,預測液滴在潤濕梯度表面上的運動速度是該領域理論探索的重要內容。早期的探索一般基于潤滑理論結合固液接觸線和接觸角來分析液滴運動,后來理論研究逐漸側重到宏觀的力學特性,如Subramanian[22]基于楔形液滴形狀和潤滑理論的兩種近似方法,獲得液滴在潤濕梯度表面運動的驅動力和阻力,由此推導得到液滴的準穩態速度。潤濕梯度驅動力歸根結底源于表面能與動能的轉化,因此也可從能量角度研究液滴運動的力學特性。Liu[24]建立的統一理論力學模型中,驅動力正是由表面能公式和Young 方程推導得出。除此之外,Liu 還采用分子動力學模擬分析水滴的運動速度和軌跡,驗證建立的力學模型。
近年來,隨著計算機技術的發展和商業數值模擬軟件的日趨成熟,液滴在潤濕梯度表面上導向運動的數值研究逐漸興起。由于其高效率、低成本,且能獲得直觀細致、準確有效的結果,能有效補充理論與實驗研究,所以越來越獲得學者認可。潤濕梯度表面上的液滴運動涉及流體流動方面的兩相流問題,即空氣-水的氣液兩相流。除上述分子動力學方法[24,34],常見的解決兩相流問題的數值方法還有Lattice Boltzmann(LBM)[27,29-30,33]、流體體積(VOF)[32]、水平集(Level- set)[31]、相場[28,34]等。它們在處理物理模型、兩相界面追蹤和求解計算等方面各有利弊。這些方法都已被學者用于解決潤濕梯度表面上液滴運動的問題,而且已經獲得了不少成果[27-34]。他們的研究熱點集中于液滴尺寸[30,34]、液滴組分[28]、液滴初始位置[27]、液滴黏性[29,32]、表面潤濕梯度[24,27-34]、表面接觸角滯后[29]、表面取向[33]等,相關國內外研究進展列于表1 中。

表1 潤濕梯度表面液滴運動的數值研究進展 Tab.1 Numerical research progress of droplet movement on surface with wettability gradient (WG)
從表1 可以明顯看出,LBM 方法最常被學者用于分析潤濕梯度表面的液滴運動。另外,綜合表1 來看,對固體表面而言,較大的表面潤濕梯度、較小的接觸角滯后,更有利于液滴的導向運輸;對液滴而言,較小的液滴黏性和較大的液滴彈性,更容易使自身在固體表面上快速運動。因此,發展潤濕梯度表面驅動液滴導向運輸技術的關鍵在于高梯度、低接觸角滯后固體表面的制備,這也對相關領域研究人員提出了更高的要求。事實上,就潤濕梯度表面的制備和在該表面上的液滴運輸實驗來講,學者已經進行了很多探究,并取得了一些進展[35-42]。
2.2 表面制備及液滴運輸實驗研究
如前所述,微納米粗糙結構以及低表面能的構造是超疏水表面制備的關鍵,其實不僅僅是超疏水表面,潤濕梯度表面的制備也依賴于表面粗糙度和表面能。表面粗糙度涉及固體物性和微尺度結構特性。先前,Wenzel[20]和Cassie[21]對粗糙度改變液滴表面接觸角進行了基本理論的探究。在本身具有高表面能性質的材料表面修飾低表面能物質能顯著提高疏水性。大多潤濕梯度表面的制備方法都是結合表面粗糙度和表面能構造出非均勻潤濕性的表面,如Malouin 等[43]通過改變基底表面硅微柱陣列的孔隙度來改變表面粗糙度,然后在微柱陣列表面涂覆一層薄的氟化鈍化層,就得到具有非均勻潤濕性的表面。這些表面微納米結構的構造和表面改性的方法,包括化學氣相沉積 法[35-37,42]、離子刻蝕法[40-41]、激光刻蝕法[40-41]、電化學法[38-39]等。
對于制備出的表面上的液滴導向運輸實驗,最早由Chaudhury 等[35]首次在潤濕梯度表面上實驗觀察到液滴運輸現象。在液滴運輸過程中,速度、位移[35-37,39-41]等參數的獲得是分析液滴動態行為的基礎,綜合已有的實驗速度測量值[35-37,40],液滴在潤濕梯度表面上的導向運輸速度大概為幾十毫米每秒。這些宏觀參數對深入研究潤濕梯度表面上液滴運動的力學特性(如驅動力、阻力)有重要參考意義,同時可以驗證數值研究中得到的關于力學特性的結論。跟數值模擬的研究內容相似,表面粗糙度和表面能構造的潤濕梯度值[35-42]也是實驗研究的重點,其他如液滴尺寸[37]、液滴與表面黏性[35,41-42]、表面傾角[35,37]等相繼被學者的研究涉及。表2 即為歸納的表面制備及液滴運輸實驗研究進展。
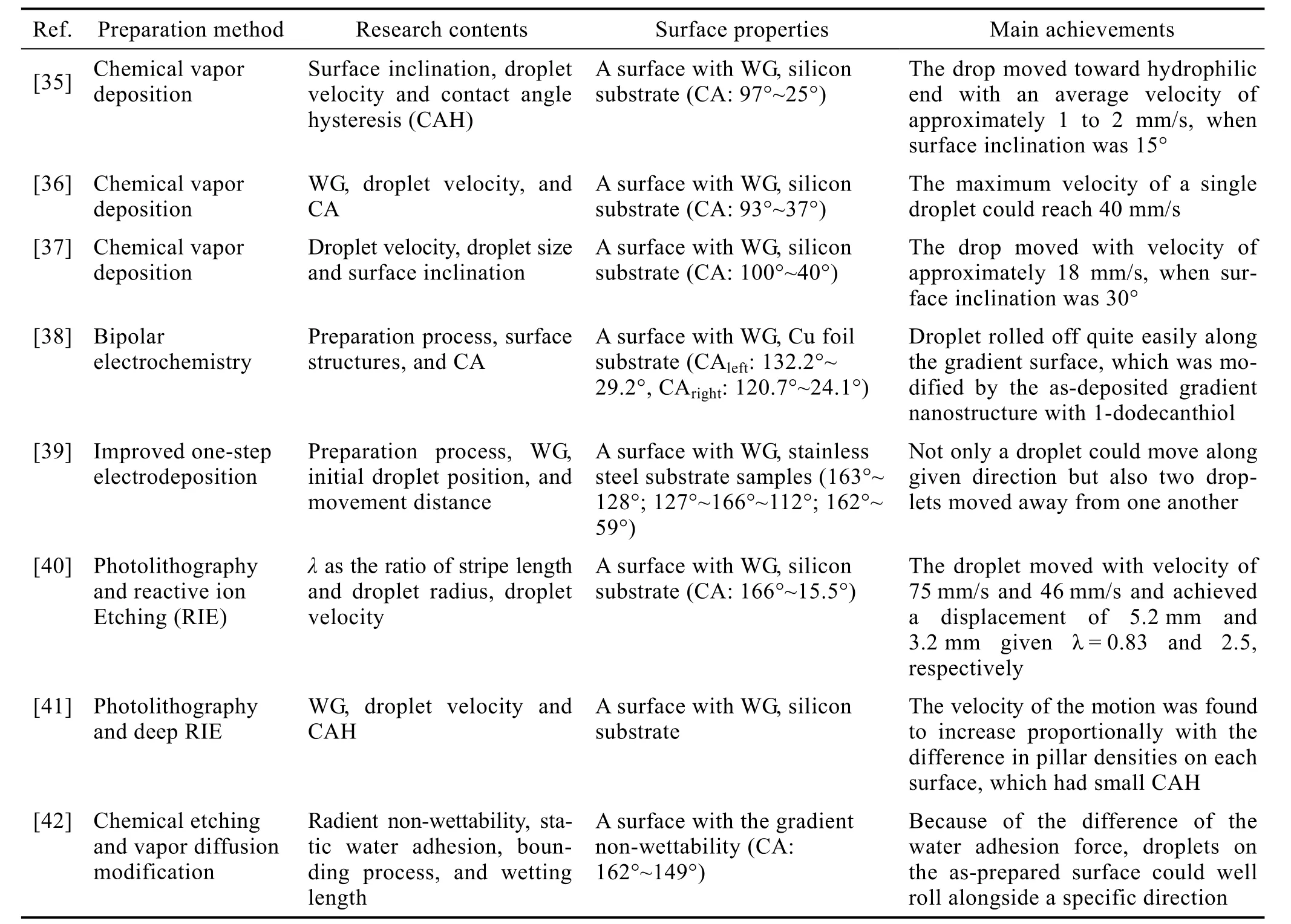
表2 潤濕梯度表面液滴運動的實驗研究進展 Tab.2 Experiment research progress of droplet movement on surface with wettability gradient (WG)
與理論及數值研究部分的結論相對應,液滴在高梯度、低接觸角滯后的表面上更容易實現導向運動。顯然,高性能表面的制備對該領域的進一步發展尤為重要。結合表2 看,液滴在潤濕梯度表面上最大的運動速度只達到75 mm/s[40],而且潤濕梯度表面存在潤濕性范圍瓶頸,最大潤濕性跨度為0°~180°,這對液滴的運動距離存在巨大限制。因此,潤濕梯度驅動的液滴運輸在實際工業領域中的應用性并不是很強。綜上所述,開發自發、快速、長距離液滴運輸的驅動機制仍是接下來需要思考的重要課題。
3 超疏水基底異性軌道表面上重力驅動的導向運動
3.1 表面制備及液滴運輸實驗研究
超疏水基底異性軌道表面是指在具有超疏水潤濕性的基底上,通過物理或化學方法刻出疏水或親水導向軌道的表面。液滴由于受表面異性的范德華力作用,可以在自重力驅動下沿在超疏水基底設計的異性軌道作導向運動。稻葉上的水珠沿著葉莖線滾落[44],還有前文提到的沙漠甲蟲[3-4]、豬籠草[5-7]、仙人掌莖[8-10]等,都是大自然中應用該原理的成功范例。這種生物啟發的液滴運輸技術受到很多學者關注。具體到科學研究中,超疏水基底的制備大多采用的是構造微納米粗糙結構和涂覆低表面能物質結合的方法。但制備出的表面穩定性與時效性一直是困擾學界的難題。最新提出的去耦合機制將表面浸潤性和機械穩定性拆分至兩種不同的結構尺度,通過在兩個結構尺度上分別進行優化設計,為超疏水表面創造出具有優良機械穩定性的微結構表面,解決了超疏水表面機械穩定性不足的關鍵問題[45]。高性能超疏水基底是實驗研究該課題的基礎,另一方面,異性軌道的制備對液滴的受控導向運動更加關鍵,目前常見的制備方法包括銑削[48,50]、印刷[49]、電化學蝕刻和光刻[47,51-52]等。
液滴在制備出的超疏水基底異性軌道表面上能否沿路徑線實現導向運動,需要經過實驗研究的驗證。Xu 等[46]首先通過實驗證明了水滴在超疏水基底異性路徑線上的導向運輸,當圖案化的超疏水表面的傾斜角度和水滴的體積對應時,水滴的滑動精確地遵循路徑線。除表面傾角和液滴尺寸外,軌道寬度[47-48,50-51,53]也是影響液滴在表面運動的重要因素。表3 列出了超疏水基底異性軌道表面上液滴運動的實驗研究進展。部分學者在實驗結果的基礎上對接到實際應用的測試,如Mertaniemi 等[48]將兩個液滴在兩條軌道的交叉點混合,為生物危險微流體的混合研究提供了指導方向;Yang 等[50]制造平行且變窄的雙軌親水軌道,用于控制微流控芯片上液滴的運輸、混合、捕獲和釋放。
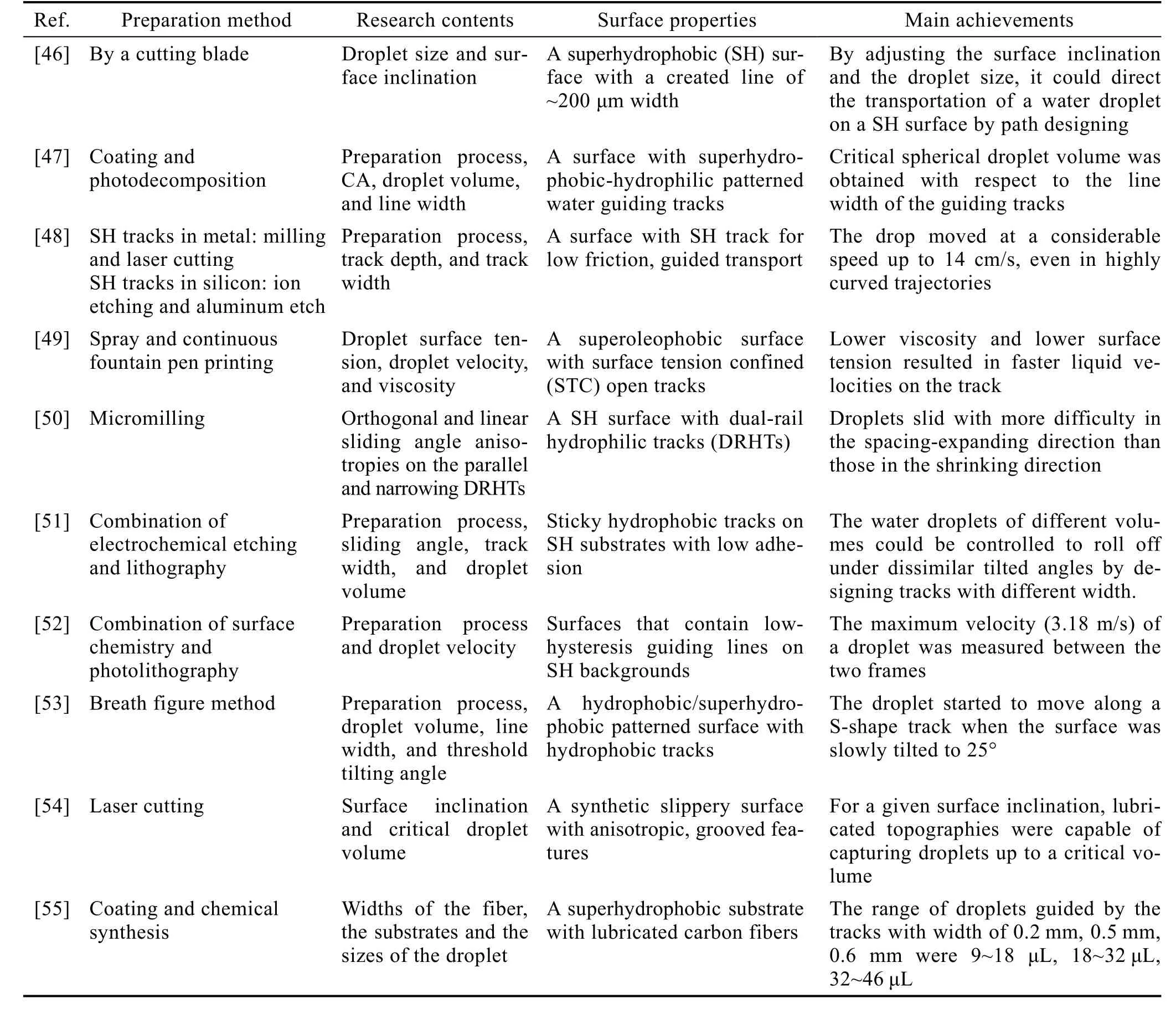
表3 超疏水基底異性軌道表面上液滴運動的實驗研究進展 Tab.3 Experiment research progress of droplet movement on superhydrophobic substrate with anisotropic track
液滴在超疏水基底異性軌道表面上的受控運動主要受軌道寬度[47-48,50-51,53,55]、軌道性質[46-55]、自身尺寸[46-47,51,53-55]、自身表面張力[49]、表面傾角[49,54]和表面滑動角[47,50-51,53]的影響。綜合表3 的研究進展,異性軌道以低粘附性的疏水軌道為主,低表面張力液滴在軌道的導向運輸效率相對較高,軌道寬度與液滴尺寸、表面傾角相互聯系。與潤濕梯度表面上的液滴導向運輸效率相比,異性軌道表面上的受控導向運動速度明顯上升一個量級,沿整段軌道的運動速度可達到14 cm/s[48]。所以,該研究對霧收集、微流控系統的優化設計等具有實用意義。研究人員在此基礎上也確實已經取得一些面向應用的成果[6,48,50,57,59-67]。
3.2 相關領域的應用研究
微流控是一種精確控制微尺度流體,尤其特指亞微米流體的技術。應用到微流體生物芯片,它可以幫助生物學家創造可控的醫學檢測平臺和化學合成平臺。
醫學檢測包括病毒檢測,尤其是最近,病毒的肆虐一直威脅著全球人類的健康。孔文等[56]以甲型H1N1 流感病毒檢測為例,基于微流控等溫擴增技術建立了一種簡便、快速的流感病毒檢測方法,為呼吸道傳染病疫情防控提供技術指導。具體到潤濕性表面在微流控的應用,除上述Mertaniemi 等[48]和Yang等[50]涉及的微流控應用研究,嚴春芳等[57]制備具有親疏水圖案化的微流控紙芯片,將制得的紙芯片用于人體全血中血糖含量的測定,線性范圍為 1.7~ 17.7 mmol/L,可滿足血液樣品中血糖的測定。該技術能有效避免等離子體氣滲漏所造成的親水通道擴張,實現模具圖形向濾紙的高精度轉移。Shang 等[6]通過鐵流體組裝模板法,在人工豬籠草骨膜表面制備了微流體器件。該裝置為Y 形,帶有兩個臂通道和一個用于合成反應的長通道。高錳酸鉀和抗壞血酸的水溶液分別在兩個臂通道上釋放,由于在生物啟發通道上的導向運輸,兩種流體在長通道中匯聚,顏色消失則表明反應完成。
淡水對維持人類健康至關重要。世界上三分之二的地區正經歷水資源短缺,特別是半干旱和干旱地區。淡水資源匱乏正成為人類社會可持續發展的重要制約,而大氣中的霧水約占地球上所有淡水資源的10%[58]。超疏水基底上異性軌道圖案表面應用到霧收集領域中的研究,近年來獲得豐富的成果[59-63]。
Wu 等[59]設計了一條直線的超親水軌道,該軌道在超疏水表面上具有高對比度和定向潤濕性。盡管液滴在平行于軌道的方向上更容易滑動,但由于混合液滴的堆積面積較大,因此這種帶狀軌道表面在垂直于軌道的方向上具有更高的霧收集效率。作者還研究了軌道寬度和間距對霧收集效率的影響。所有各向異性表面中,軌道寬度和間距分別為300 μm 和3000 μm的表面,表現出最大約26%的效率差異,表明該表面霧收集性能最佳。超疏水基底上親水軌道的粘附性是運輸所收集的水滴不得不考慮的影響因素。所以,注入潤滑劑的疏水軌道[60]和“親水不沾水”的定向光滑粗糙表面[61]可用于進一步的高效集輸水。
除直流型軌道外,圖案化軌道表面也存在對霧收集性能的影響。霧收集試驗表明,具有楔形圖案的表面具有較高的集水效率[62],這是由于液體內部Laplace壓力梯度與接觸角滯后對比,楔形軌道上的水滴更易于收縮和分離。
開發新型材料表面膜也可以顯著提高集水能力。Wu 等[63]研究了一種新型疏水/親水定向芯吸納米纖維膜。與相同結構和尺寸的疏水/親水膜相比,定向芯吸纖維膜具有更高的集水能力。孔隙結構和尺寸都會影響集水效率,疏水層和親水層之間孔隙尺寸的變化可導致集水能力相差1.7 倍,疏水層中較大的孔隙和超親水層中較小的孔隙,更有助于將水從疏水面吸到超親水面。
換熱器在許多工業領域中應用廣泛,它的性能優劣對于能源系統的整體能效和經濟成本非常重要。如前所述,常用的鋁、銅和不銹鋼等換熱器材料,由于具有天然親水性,難以有效排除換熱表面的冷凝液滴,而潤濕異性軌道圖案表面對加強冷凝換熱有很大的應用意義。
Alwazzan 等[64]在銅管表面構造疏水性不同的條紋圖案,疏水性較強的基底區域具有快速的液滴流動性,疏水性較弱的條紋軌道區域能使液滴沿路徑線導向運動。在最佳寬度比下,該表面的傳熱性能比膜狀凝結和珠狀凝結分別高480%和180%。除了平行的潤濕異性條紋軌道圖案表面,其他如倒V 形疏-親水軌道圖案表面[65]、楔形軌道圖案表面[66]、疏水基底圓形親水圖案表面[67]、樹狀疏-親水軌道圖案表面[67]等被學者相繼研究,用以加強冷凝換熱。
液滴在潤濕異性軌道表面受重力的導向運動,盡管在生物醫學檢測、淡水收集、換熱器等領域的應用已獲得豐富的成果,但固定的驅動機制限制了液滴導向運輸的進一步發展,而且表面潤濕異性軌道的結構使液滴的導向路徑受限。所以,如何提高液滴導向運輸的可操縱性和智能性是該課題面臨的關鍵問題。
4 超疏水表面上外場驅動的導向運動
4.1 光、電、熱、磁誘導驅動
無論是通過固體表面潤濕梯度驅動液滴,還是通過自重力使液滴在異性受限軌道上運動,它們都存在一個共同的問題,即缺乏可操縱性和智能性。利用液滴對外場的響應可以很好地解決這個問題,因而研究人員在利用光、電、熱和磁外場,來實現可操縱化和智能化的液滴導向運輸作出了巨大努力[68-99]。
光并不能直接給固體表面上的液滴提供驅動力。但是,來自光照射的能量能被固體表面的特殊光響應分子吸收,從而改變表面特性。Ichimura[68]首次發現由于偶氮苯的光異構化,不對稱的光輻射會導致表面能出現梯度,從而能實現液滴的導向運動。值得注意的是,改變光強度梯度的陡度及方向,還可以調整運動的速度及方向。在此基礎上,類似的偶氮苯光敏聚合物材料表面上的液滴運輸被學者相繼發現,實現了纖維光控集水[69]、液滴混合[70-71]、多梯度表面混合驅動[72]、紫外線響應的智能化可編程液滴[73]等。光不但能被特殊光敏聚合物吸收響應,而且能引起熱響應。由于光的外部刺激,納米結構表面會出現不均勻的熱膨脹,導致納米結構表面傾斜,從而驅動液滴沿著預設軌道導向運動[74]。液滴運動過程中,表面的釘扎阻力一直是制約液滴運動的關鍵因素。管狀光驅動的液晶聚合物系統[71]突破了這個難題,擺脫了接觸線釘扎阻力的影響。該系統可以引起不對稱的液滴形態,通過毛細作用力可逆地操縱液滴,并且實驗表明可以通過各種形狀的微致動器混合多相液體(直線形、Y 形、蛇形和螺旋形)。
電對液滴作用的研究由來已久。Lippmann[75]首次觀察到電毛細上升現象。Beni 等[76]首次提出電潤濕的概念。電潤濕(Electrowetting,EW)是指通過改變液滴與絕緣基板之間的電壓來改變液滴在基板上的潤濕性,即改變接觸角,使液滴發生形變、位移的現象。電潤濕作為一種微流體現象,已經廣泛被用作各種流體及電光設備的驅動機制。隨著超疏水材料研究的不斷完善[45,77],基于超疏水表面的新型電控液滴技術[78]引起了學者廣泛關注。這些技術包括電暈放電驅動介電液滴[79]、“全能型”靜電操縱液滴[80]、電場梯度驅動液滴[81]以及表面電荷密度梯度驅動液滴[82]。其中,表面電荷密度梯度驅動液滴的新型機制,實現了無額外能量輸入情況下液滴的長距離、高速運輸。Sun 等[82]通過液體接觸操控表面電荷,將一串液滴滴向超雙疏表面,液滴撞擊到表面時,會立刻擴散、收縮并彈回。這導致電子從液滴中分離出來,并使受到撞擊的表面區域帶負電荷。通過調節液滴的撞擊高度,表面電荷密度會發生變化,所以形成電荷密度梯度。隨后,將液滴再次放到超雙疏表面時,表面電荷密度梯度會產生驅動力作用,推動液滴向高電荷密度方向移動。這種新型機制有望用于開發新的微流控和傳感系統。
水滴滴在溫度高于Leidenfrost 點的固體表面會完全懸浮,呈現“完全超疏水狀態”,這就是著名的Leidenfrost 效應。水滴與表面之間的薄蒸汽層在液滴運動中起主要作用。在固體表面使用非對稱結構能推動懸浮液滴自發運動。Linke 等[83]首次報道了毫米級棘輪上的Leidenfrost 液滴可以自發地向與傾斜棘輪相反的方向推進。以棘輪結構為基礎,更多的改進棘輪結構,如棘輪復合薄膜[84]、表面形貌連續變化的棘輪[85]、雙尺度棘輪[86]等,被陸續發現,用于優化Leidenfrost 液滴的自推進運動。此外,液滴停滯溫度閾值[87]、初始液滴大小和棘輪縱橫比[88]等參數也被相繼研究,為進一步優化棘輪結構上的Leidenfrost液滴運動提供了詳細數據參考。除棘輪結構外,還有學者利用前述的潤濕梯度對熱表面的液滴產生非對稱作用力[89-90],液滴會傾向于朝著微柱密度更小的區域自推進,進一步豐富了Leidenfrost 液滴操控技術。
關于液滴運輸的所有驅動方式中,磁場由于其易操作、低能耗而吸引了越來越多研究人員的注意。早期的磁控液滴技術是通過在液滴中加入磁性物質,在磁場作用下,磁性液滴被吸引而運動[91-94]。這種改變液滴組分的磁控傳輸技術在各種應用中存在局限性。新興的磁控液滴技術規避了液滴組分的改變,通過在基底表面固定磁性物質,然后施加磁場使液滴周圍表面發生變化,實現液滴的受控運輸。這種磁響應表面可分為三類[95],即磁性可彎曲微結構表面[96-97]、可切換形貌表面[98]和注入鐵磁流體表面[99]。表面的磁性微柱在磁場吸引下,會發生彎曲變形,導致表面的潤濕性發生變化。Lin 等[96]基于此原理,發現了一種動態潤濕性的超疏水磁性微柱陣列,其具有磁感應傾角動態變化的特性,實現了對液滴導向輸運的有效控制。液滴周圍表面地形的變化會直接作用于液滴。Damodara 等[98]發現了在PDMS-鐵顆粒復合基底的超疏水表面上的水滴受控運動,由于作用在鐵顆粒上的磁力,液滴周圍的表面輪廓發生變化,從而驅動液滴運動。相比于高強度磁場作用于表面結構,鐵磁流體表面所要求的磁場強度低得多[95]。鐵磁流體是懸浮在油或水中的鐵磁性顆粒(~10 nm)在磁場作用時強烈極化的液體。最近的研究中,Mandal 等[99]報道了磁場作用下油基鐵磁流體尖峰上水滴的傳輸,分析了液滴運動過程中所受的三種力和影響因素。
4.2 各種液滴運輸技術的優缺點分析
就光、電、熱和磁四種外場誘導的液滴導向運輸而言,光控技術比較容易控制且安全性較高,但是需要特殊儀器才能產生特定波長且具備響應性的光,如紫外線。外加電場安全系數低,新型電控液滴技術高效智能,可編程液滴有望進一步應用于微流控、微反應器、防冰防霜等領域。熱控技術的實現方式較簡單,本質上依賴于表面的非對稱結構,然而工業領域中的很多基材不具備耐高溫屬性。磁場安全、可無損操控,響應性也很強,但通常需要磁性材料來輔助操縱液體。
對比潤濕梯度和異性軌道表面的液滴運輸技術,光、電、磁誘導的液滴運輸可控性更強,液滴運動的方向并不受表面結構限制。但是,宏觀外場不能局限某一小型區域,所以對于多液滴的操縱,如果液滴之間的間距太小,多液滴之間會相互影響。因此,結合固體表面的潤濕梯度和異性軌道,設計出“高分辨率”的多液滴導向運輸系統,是未來值得深入研究的方向之一。
5 總結與展望
本文介紹了液固接觸和液滴運動的基本理論,還總結了液滴在不同潤濕性表面上導向運動的不同驅動機制。本文不但介紹最具代表性的研究工作,而且指出不同部分仍存在的挑戰。液滴驅動機制的發現一直是液滴導向運輸研究中的關鍵。相信隨著技術的不斷進步,未來會有更多的驅動機制被發現。
無論驅動機制未來如何變化,液滴運動過程中本質上的力學機制一直不變,目前大多數研究側重于驅動力、阻力等常見的力學特性,而對更復雜的液滴運動(如曲線運動)過程中涉及到的其他力(如離心力、表面張力等)鮮有研究。這些往往會影響到液滴導向運輸的可控性。
為提高液滴導向運輸的可控性,通常需要液滴對外場的響應。最常見的方法是本文提到的四種方法:光、電、熱和磁。在不使用外場的情況下,則需要通過表面的形態或化學組成等特性來控制液體,如潤濕梯度和異性軌道等。所以,耦合多種外場結合固體表面的設計來控制單液滴或多液滴的運輸,是未來極具吸引力的研究方向。
科學研究的意義在于為實際應用奠定基礎。盡管學者已經發現了液體導向運輸的某些應用,例如集水、微流控等,但它們仍處于實驗室的實驗研究階段,如何對接工業領域是至關重要的問題。對此問題最大的挑戰在于液滴速度的智能化控制和潤濕性固體表面的量產化制備。在集水領域,優化材料表面對液滴的功能化作用有限,集水效率存在瓶頸,且實驗室的可操縱性與實際應用場景的可操縱性有很大差距,所以難以真正在缺水地區大規模普及。為克服集水效率低的問題,可以考慮采用外場作用來提高液滴的運輸效率,同時開發對應外場響應的應用程序來提高可控性與智能性。在微流控領域,傳統的封閉式微流體系統采取壓力、電滲等驅動方式,系統中微滴控制的精準性有待提高,而開放式微流控系統中的微流體具有較小的運輸阻力和較高的可控性,但驅動機制的問題限制了它的進一步發展。同樣地,運用外場對表面或液滴的響應性結合表面潤濕性設計是一個很好的解決方法。
