某型光電吊艙自檢紅外熱像儀異常故障分析
2021-02-03 12:15:54伏克峰
航空維修與工程 2021年12期
摘要:針對某型光電吊艙自檢紅外異常故障,通過對系統內部控制信號流程進行深入分析,提出問題的分析思路和處理步驟,最終定位、排除了故障。該故障分析與判斷的思路與方法對處理此類問題具備一定的借鑒意義。
關鍵詞:光電吊艙;紅外熱像儀;自檢;異常
Keywords:photoelectric pod;infrared thermal imager;self-inspection;abnormal
0 引言
某型無人機載光電吊艙,在完成功能調試進行缺陷剔除階段振動試驗的過程中,對吊艙功能檢查時發現,紅外熱像儀變倍、調焦等功能正常,紅外視頻圖像上視場值不隨視場變倍而變化,持續顯示為固定值,吊艙上位機程序控制界面上紅外焦距反饋值為0,紅外視頻圖像下吊艙跟蹤功能異常,無法正常跟蹤目標,吊艙其余功能正常。停止振動,靜態環境下重新檢查,故障可以復現,對吊艙進行系統自檢,系統提示紅外熱像儀自檢“異常”。
1 故障分析
該型光電吊艙主要由穩定平臺、可見光電視、紅外熱像儀、激光測照器、伺服控制器、圖像處理器、二次電源等部分組成。
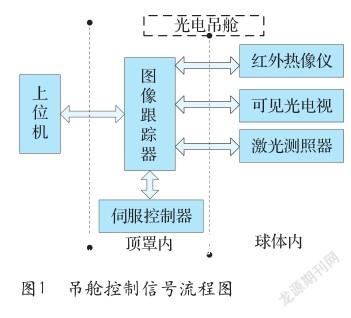
該型光電吊艙系統控制信號流程如圖1所示。上位機利用控制程序通過異步RS422總線對吊艙進行功能控制,上位機發出的控制指令首先由吊艙內圖像跟蹤器進行接收和解讀,并根據指令內容轉發給可見光電視、紅外熱像儀、激光測照器等傳感器或伺服控制器,各傳感器和伺服控制器接收并執行上位機的指令,同時各傳感器和伺服控制單元將執行情況通過異步RS422總線方式反饋給圖像跟蹤器,圖像跟蹤器對信息進行接收和處理,然后向上位機反饋。
在信號流程中,圖像跟蹤器處于樞紐位置,其主要作用包括:
1)實時采集來自可見光攝像機或紅外熱像儀輸出的視頻信號,計算出圖像中目標的位置信息,并將目標偏離視場中心的誤差信號輸出給伺服控制組件,以驅動穩定轉塔轉動,實現對目標的穩定跟蹤;
2)將輸入的數字視頻圖像進行字符疊加及格式變換,輸出模擬PAL視頻和數字視頻;
3)圖像跟蹤器作為通信樞紐,與上位機、伺服控制器、可見光電視、紅外熱像儀、激光測照器進行通信,實現光電吊艙的操作控制和參數傳遞;
4)圖像跟蹤器接收來自伺服控制器、各傳感器的工作狀態等信息,以字符、圖形等形式疊加到視頻圖像上,然后輸出給顯示器。
根據系統信號流程,結合故障現象進行分析。首先,上位機可以控制紅外熱像儀進行變倍、調焦等功能操作,即紅外熱像儀可正常接收執行上位機指令,說明上位機→圖像跟蹤器→紅外熱像儀之間指令發送通道正常;但上位機程序控制界面上紅外熱像儀焦距返回值異常,且吊艙進行系統自檢時提示紅外熱像儀異常,說明紅外熱像儀自身故障或紅外熱像儀→圖像跟蹤器→上位機的信號反饋通道出現了異常。根據以上分析,以自檢紅外熱像儀“異常”為頂事件建立故障樹,對各種可能故障分支逐項進行分析,如圖2所示。
1.1 紅外熱像儀故障
打開吊艙后球殼,拆下紅外熱像儀上的供電及通信接插件,用工裝電纜連接紅外熱像儀,單獨對紅外熱像儀進行檢測,結果紅外圖像清晰,變倍、調焦等功能正常,視場值、焦距反饋值隨視場變換而變化,均正常,排除紅外熱像儀故障的可能。
1.2 導電滑環故障
由于圖像跟蹤器安裝在吊艙上部頂罩內,紅外熱像儀安裝在吊艙下部的球體內,頂罩與球體之間可進行360°的連續旋轉,由導電滑環實現頂罩與球體之間的供電、通信以及視頻傳輸。
根據吊艙布線工藝文件,分別查出紅外熱像儀與圖像跟蹤器之間RS422通信信號在各自接插件上的對應管腳,利用三用表歐姆檔分別測量用于RS422信號傳輸的兩根導電滑環線的接觸電阻值。測試的同時,使頂罩與球體之間緩慢進行360°相對運動,這樣可以檢測出局部接觸不良的情況。經檢測,360°區間內阻值無跳變,排除導電滑環故障的可能。
1.3 圖像跟蹤器故障
更換為圖像跟蹤器完好備件,進行代換測試,更換后吊艙自檢紅外熱像儀“正常”,紅外熱像儀變倍、調焦等功能正常,視場值、焦距反饋值隨視場變換而變化,均正常,紅外圖像下跟蹤功能正常。重新安裝原圖像跟蹤器,故障可以復現,由此確認圖像跟蹤器故障。
為進一步確定圖像跟蹤器故障的部位,按故障樹逐項檢查。
1)通信芯片U5(MAX3490)故障
MAX3490通信芯片用于實現將單端信號與RS422電平差分信號的相互轉換,為全雙工通信芯片。
U5負責FPGA與紅外熱像儀之間通信,為判斷U5是否正常工作,首先對U5通信芯片的RS422差分信號接收管腳進行檢測,確認反饋紅外熱像儀信息的RS422信號是否到達U5。用示波器分別檢測U5的7腳、8腳,7腳上可觀測到幅值為5V的通信信號波形,8腳上僅觀測到高電平,未觀測到通信信號,但在8腳的焊盤上可觀測到幅值為5V的紅外熱像儀反饋信號波形。用示波器檢測U5通信芯片單端信號輸出端2腳,無通信信號波形。用示波器表筆稍微用力按壓U5芯片8腳,可檢測到通信波形,松開后波形消失。

利用電子顯微鏡檢查通信芯片U5的各管腳焊接情況,發現U5的8腳焊錫量比其他管腳明顯偏少,可判定U5的8腳虛焊。
2)FPGA故障
首先,在X光機下檢查FPGA的焊接情況,發現錫球均勻,未見空洞,焊接良好,無虛焊現象。之后將U5通信芯片8腳重新焊接正常后,用示波器檢測U5通信芯片單端信號端2腳,信號正常,說明紅外熱像儀反饋信號已能正常輸入FPGA。然后,檢測FPGA輸出管腳通信信號波形是否正常,即通信芯片U6的3腳輸入單端信號波形正常。由此判定,FPGA可正常接收U5反饋的紅外熱像儀信息,并經處理后發送給U5通信芯片,FPGA工作正常,排除FPGA故障的可能性。
3)通信芯片U6(MAX3490)故障
U6可實現上位機與圖像跟蹤器之間的通信,根據各傳感器及伺服控制器可正常執行上位機指令,以及除紅外熱像儀反饋信息外各傳感器及伺服控制狀態反饋信息均可正常反饋至上位機,判定通信芯片U6正常,排除通信芯片U6故障的可能性。
2 機理分析
紅外熱像儀與上位機之間的通信電路示意圖如圖3所示。
當上位機發送紅外熱像儀變倍、調焦等功能指令時,指令先以異步RS422方式發送至圖像跟蹤器上的接口通信芯片U6(MAX3490),U6接收到上位機發送的RS422差分信號后,將其轉換為單端信號傳輸給FPGA,FPGA經過內部的處理與判斷,將上位機指令傳輸給通信芯片U5(MAX3490),通過U5將指令發送給紅外熱像儀,紅外熱像儀根據指令執行相應動作,從而實現紅外熱像儀的變倍、調焦等功能。紅外熱像儀實時將焦距值等信息反饋給U5,U5傳輸給FPGA,FPGA經過運算后將視場值疊加到紅外圖像上并實時顯示,FPGA同時將紅外焦距值經U6反饋給上位機,通過控制界面進行顯示。如果上述任何一個環節出現故障,都可能導致紅外熱像儀執行或反饋值異常。由于圖像跟蹤器上通信芯片U5的8腳虛焊,造成紅外熱像儀的反饋回路故障,FPGA無法接收到紅外熱像儀的反饋信息,造成FPFA反饋給上位機和伺服控制器的紅外熱像儀焦距值為0,故控制界面上的紅外焦距值為0;紅外圖像上疊加的視場值一直顯示為默認值。發送跟蹤指令時,因伺服控制單元需要實時調用紅外熱像儀的焦距值,此焦距值始終為0,造成跟蹤算法計算值異常,從而造成無法正常跟蹤目標,跟蹤功能異常。
3 故障排除
對補充焊接后的U5芯片補絕緣漆,將圖像跟蹤器恢復裝配,吊艙內部接插件連接可靠、球殼安裝齊全后,對其進行功能、振動等環境試驗驗證,紅外熱像儀自檢正常,其余功能亦正常,故障排除。
4 總結
本文通過對某型光電吊艙自檢紅外熱像儀異常故障的分析與排查過程,對吊艙基本控制原理與內部控制信號流程進行了詳細的解析,可為同類問題的處理提供參考。
作者簡介
伏克峰,工程師,主要從事光電吊艙生產工藝等方面的研究工作。
