國產遙感影像分類技術應用研究進展綜述
2021-02-04 14:15:18謝仕義
計算機工程與應用 2021年3期
胡 杰,張 瑩,謝仕義,2
1.廣東海洋大學 數學與計算機學院,廣東 湛江524088
2.湛江灣實驗室 南海漁業大數據中心,廣東 湛江524088
習近平總書記在黨的十八大報告中強調,中國科技創新必須堅定不移走自主創新道路。作為當代高新技術的一個重要組成部分——遙感技術,集中了空間、電子、光學、計算機通信和地學等學科的最新成就,是衡量一個國家科技發展水平和綜合實力的重要尺度[1]。隨著國產遙感衛星數量的增加和分辨率的提高,防控新型冠狀病毒肺炎疫情期間,高分二號衛星實時拍攝火神山、雷神山醫院建設進程,助力精準施策[2],為我國遙感自主獨立應用開創新局面。云計算、人工智能和5G 技術的出現,又為遙感數據的獲取提供了更為便捷的方式,如“一帶一路”地區干旱指數的提取,促進國產遙感影像分類向更加高精度方向發展。影像分類是遙感影像信息提取中的基本問題之一和遙感影像應用的關鍵[3],為我國掌握本土信息資源自主權、滿足國家的緊迫需求具有重大戰略意義。
當今遙感影像從地質災害管理、礦產資源、城市建設、海洋領域、氣象等傳統行業應用向精細農業、環境評價、數字城市等新興行業應用轉移,表明遙感技術應用在人們的實際生活中發揮著越來越重要的作用。因此越來越多學者投身于遙感影像分類研究中。就目前已有的遙感影像分類方法方面的文獻綜述,Li等人[4]從分類的對象和分類時被分像元的純凈程度的角度,把遙感影像劃分為基于像元的、混合像元的和基于對象的分類技術;李健[5]依據分類的對象和分類算法,把遙感影像劃分為單一影像的、分類器融合的和面對對象的分類技術;張永宏等人[6]就道路提取方法發展現狀,把遙感影像劃分為基于像元的、面向對象的和深度學習的分類技術;張裕等人[7]從特征空間的角度,把遙感影像劃為基于人工特征描述的、基于機器學習的和基于深度學習的分類技術。以上文獻對遙感影像分類方法總結的都不夠全面和具體。綜合上述分類技術,針對國產遙感影像分類方法的研究,依據分類的對象,對中低分辨率的高光譜和多光譜影像采用基于像元的和混合像元的分類技術。由于遙感影像本身的空間分辨率以及“同物異譜”“異物同譜”現象的存在,基于像元的和混合像元的分類法出現了較多的錯分、漏分現象,導致分類效果不佳[8]。因此提出了面向對象的分類技術,該技術能夠綜合利用地物的光譜特征、幾何信息、結構信息和上下文的語義信息,較好地解決上述技術分類的不足。對于基于像元的、混合像元的和面對對象的影像分類按照分類算法又細分為統計識別分類和分類器融合分類,通過不同的分類算法以達到影像分類精度提高的目的。
隨著衛星和傳感器技術的迅速發展,上述這些淺層的機器學習分類模型因為計算單元有限,不能充分學習復雜樣本中的復雜信息[9-11],導致分類精度不高。結合當下熱門的遙感大數據與人工智能發展方向,針對這些問題,李曉峰團隊[12]分別基于經典的U-Net架構(像素級分類)和SSD架構(對象級檢測)提出適合于海洋遙感影像的深度學習分類技術。深度學習技術為基于不同場景的遙感影像分類問題帶來了新的解決思路,但只有少數學者把深度學習技術應用到國產遙感影像分類的研究工作中,因此研究如何將深度學習方法運用到國產遙感影像的分類中具有深遠的研究意義和社會價值。
本文概述了國產遙感衛星數據,然后闡述了四種遙感影像分類技術,并對每種分類技術應用于國產遙感影像的研究進展進行了綜合分析,根據每種遙感影像分類技術在其應用上的研究進展分別進行分類方法的比較,總結了國產遙感影像分類技術應用存在的問題及發展趨勢。未來為人們在國產遙感影像分類應用研究上提供參考指南。
1 國產遙感數據概述
本文對國內主要的6 個系列遙感衛星數據進行概要介紹,它們分別為環境系列遙感衛星、資源系列遙感衛星、風云系列遙感衛星、高分系列遙感衛星、海洋系列遙感衛星、小衛星系列遙感衛星,各個衛星具體參數內容可以參考文獻[13]。
1.1 環境系列遙感衛星
環境系列遙感衛星是我國專門用于環境和災害監測的對地觀測衛星系統[13],主要由2顆光學衛星(HJ-1A衛星和HJ-1B 衛星)和一顆雷達衛星(HJ-1C 衛星)組成的。其中HJ-1A和HT-1B衛星搭載了空間分辨率為30 m的CCD相機,搭載了空間分辨率分別為100 m的高光譜成像儀和300 m 的紅外多光譜相機;HJ-1C 衛星是中國首顆S 波段合成孔徑雷達衛星,空間分辨率為5 m。它們擁有光學、紅外、超光譜多種探測手段,具有大范圍、全天候、全天時、動態的環境和災害監測能力[14]。
1.2 資源系列遙感衛星
資源系列遙感衛星是專門用于探測和研究地球資源的衛星。我國已陸續發射了“資源一號”“資源二號”和“資源三號”系列衛星。“資源一號”系列衛星分別包括中巴合作的CBERS 和國內研發的ZY1。CBERS 包括CBERS-01、CBERS-02、CBERS-02B、CBERS-02C 和CBERS-04,其中CBERS-02B 搭載了2.36 m 全色、10 m多光譜相機,CBERS-02C 搭載了5 m 多光譜、10 m 的PMS 多光譜相機,CBERS-04 搭載了5 m 全色、10 m、20 m、40 m 多光譜相機;ZY1 包括ZY1-02D,ZY1-02D是中國首顆民用高分辨率高光譜業務衛星,搭載了2.5 m全色、10 m多光譜、30 m高光譜相機;它們廣泛被應用于農業、海洋、環保、城市規劃及災害監測等領域。“資源二號”(ZY-2)是新一代傳輸型遙感衛星,包含01、02 和03 星[13],擁有3 m 分辨率影像數據,主要用于城市規劃、農作物估產和空間科學試驗等領域。“資源三號”(ZY-3)包括01星和02星,“資源三號”01星是中國第一顆自主的民用高分辨率立體測繪衛星,搭載了3.5 m 的立體相機和6 m的多光譜相機;“資源三號”02星搭載了2.5 m的立體相機和5.8 m的多光譜相機;它們主要用于基礎地形圖的測制和更新以及困難地區測圖和城市測圖等領域。
1.3 風云系列遙感衛星
風云系列遙感衛星主要有風云一號(FY-1)、風云二號(FY-2)、風云三號(FY-3)和風云四號(FY-4)系列的8顆極軌氣象衛星和9顆靜止氣象衛星,是世界上少數幾個同時具有極軌和靜止兩個系列業務氣象衛星的國家和地區之一,同時在服務“一帶一路”建設和“共建人類命運共同體”等工作中發揮著積極作用[15]。“風云一號”系列是我國第一代極地軌道氣象衛星,已經成功發射4顆衛星(FY-1A至D),搭載了空間環境監測器和1 000 m分辨率的多光譜可見光紅外掃描輻射儀,主要用于氣候預測、自然災害和全球環境監測等;“風云二號”系列是我國第一代地球靜止軌道氣象衛星,已經成功發射8顆衛星(FY-2A至H),搭載了可見光為1 250 m的掃描輻射計和空間環境監測器,主要進行天氣圖傳真廣播,監測太陽活動和衛星所處軌道的空間環境;“風云三號”系列是我國第二代極地軌道氣象衛星,已經成功發射4顆衛星(FY-3A至D),搭載了17 000 m的紅外分光計、62 000 m的微波溫度計、16 000 m的微波濕度計、250 m的中分辨率光譜成像儀等11臺有效載荷,主要用于監測大范圍自然災害,為軍事氣象和航空,航海等專業氣象服務;“風云四號”系列是我國第二代地球靜止軌道氣象衛星,已經成功發射1 顆衛星(FY-4A),搭載了500 m 分辨率的可見近紅外多通道掃描成像輻射計和0.8~1 cm 分辨率的光譜相機,主要應用于天氣預報、災害預警等領域。
1.4 高分系列遙感衛星
高分系列遙感衛星是研發、搭建高分專項的重要組成部分,對積極支撐服務軍民融合發展、“一帶一路”建設、精準扶貧等國家重大戰略具有重要作用[16],現至少有7 顆衛星投入使用,分別是“高分一號”“高分二號”……“高分七號”。“高分一號”實現了中高分辨率與大幅寬相結合的觀測能力,其搭載的全色相機最高實現了2 m分辨率,主要應用于災害環保、漂物監察、地球遙感等領域;“高分二號”標志著我國民用遙感衛星跨入亞米級分辨率時代,其搭載的全色相機分辨率達到了0.8 m,主要應用于土地利用動態監測、礦產資源調查、城鄉規劃監測評價等領域;“高分三號”是“國家高分辨率對地觀測系統重大專項”中唯一的民用微波遙感成像衛星,又是我國首顆1 m分辨率C頻段多極化合成孔徑雷達成像衛星[17],主要應用于土壤水分監測、地質災害預測預警、流域水系特征等領域;“高分四號”是中國首顆地球靜止軌道高分辨率對地觀測光學遙感衛星[18],其搭載的多光譜相機分辨率為50 m,主要應用于森林火災監測、洪澇災害等方面;“高分五號”是國內光譜分辨率最高的衛星,也是國際上首次實現對大氣和陸地進行綜合觀測的全譜段高光譜衛星,其搭載的多光譜相機分辨率為20 m,主要應用于監測霧霾、大氣顆粒物等大氣環境監測及氣候變化研究;“高分六號”是我國首顆精準農業觀測的具有高度機動靈活性的高分辨率光學衛星,其搭載的全色相機達到了2 m,主要應用于農業資源監測、林業資源調查、防災減災救災等行業;“高分七號”是我國首顆民用亞米級高分辨率光學傳輸型立體測繪衛星,可實現我國民用1∶10 000比例尺衛星立體測圖[19],其搭載的全色立體相機達到了0.8 m,主要應用于國土測繪、城鄉建設、統計調查等方面。
1.5 海洋系列遙感衛星
海洋系列遙感衛星實現了從單一型號到多種型譜、從試驗應用向業務服務的轉變,向系列化、業務化的方向快速邁進[20]。它包括含有A、B、C 這3 顆試驗衛星的海洋水色環境系列衛星海洋一號(HY-1)、含有A和B兩顆試驗衛星的海洋動力環境系列衛星海洋二號(HY-2)和含有首顆試驗衛星的海洋監視監測系列衛星海洋三號(HY-3)[21]。其中兩顆海洋水色環境衛星HY-1B和C、兩顆海洋動力環境衛星HY-2A 和B 在軌運行。HY-1B是中國第一顆海洋衛星(HY-1A衛星)的后續星,搭載了1 100 m 分辨率的海洋水色掃描儀和250 m 分辨率的多光譜成像儀,主要應用于赤潮監測、海溫預報和海岸帶監測等領域;HY-1C是中國民用空間基礎設施“十二五”任務中四顆海洋業務衛星的首發星,搭載1 100 m 分辨率的海洋水色掃描儀、50 m分辨率的海岸帶多光譜成像儀和550 m分辨率的紫外成像儀,主要應用于全球大洋水色水溫環境業務化監測、中國近海海域與海島、海洋防災減災等行業;HY-2A、HY-2B 分別是我國第一代靜止氣象衛星風云二號氣象衛星的第一顆試驗衛星和第二顆試驗衛星,其中HY-2A 搭載2 000 m 分辨率的雷達高度計和50 000 m分辨率的微波輻射計,HY-2B搭載了25 000 m分辨率的掃描微波散射計和校正微波輻射計,它們主要應用于臺風和海洋天氣監測、暴雨預報等方面;HY-3是綜合衛星,搭載1 m分辨率的多極化、多模式合成孔徑雷達,主要用以全天候全天時探測海上目標、重要海洋災害、全球變化等方面[13]。
1.6 小衛星系列遙感衛星
小衛星系列主要選取了“天繪一號”系列、“北京”系列和“吉林一號”系列的遙感衛星數據。“天繪一號”(TH-1)系列是我國第一顆傳輸型立體測繪衛星,搭載了高分辨率、三線陣和多光譜三種相機,其分辨率分別為2 m、5 m、和10 m[22],包含01 星、02 星、03 星三顆衛星,主要是為了滿足國民經濟建設對地理影像數據的需要。“北京”系列包括“北京一號”(BJ-1)小衛星和“北京二號”(DMC3)小衛星,其中“北京一號”是我國第一個由企業實施和運行的對地觀測衛星,搭載了分辨率為4 m的全色相機和分辨率為32 m的多光譜相機,主要實現對熱點地區的重點觀測;“北京二號”是由三顆1 m全色、4 m多光譜的光學遙感衛星組成的民用商業遙感衛星星座,主要提供覆蓋全球、空間和時間分辨率俱佳的遙感衛星數據和空間信息產品[23]。“吉林一號”(JL-1)系列是中國第一顆商用遙感衛星,在軌14顆遙感衛星,包括8 顆高分辨率視頻衛星、2 顆高分辨率光學衛星,2 顆光譜衛星和1 顆技術驗證衛星[13],主要應用于國土資源監測、智慧城市建設、防災減災等領域。其中光學A 星搭載了0.72 m分辨率全色和2.88 m分辨率多光譜相機;“吉林一號”視頻01、02 星可以獲取分辨率為3 840×2 160 像素的高清彩色視頻影像,搭載了1.13 m 分辨率的彩色視頻相機;靈巧驗證星搭載了4.7 m 分辨率的全色相機,能夠對多重成像技術和國產高敏度CMOS芯片進行驗證;“吉林一號”視頻03 星搭載了0.92 m 分辨率的彩色動態視頻相機,主要服務于森林資源調查、森林火災預警與防控、野生動物保護等林業發展;“吉林一號”視頻04、05、06 星搭載了空間分辨率達到0.92 m 的動態彩色視頻相機,主要為政府部門、行業用戶等提供遙感數據和產品服務;“吉林一號”視頻07 星搭載了空間分辨率為0.92 m的動態彩色視頻相機,主要服務于測繪、環保、農業等多個行業發展;“吉林一號”視頻08 星搭載了空間分辨率為0.92 m的動態彩色視頻相機,主要服務于林業重點工作。

圖1 國產遙感影像分類技術研究進展框架
2 國產遙感影像分類應用研究進展
隨著遙感影像分辨率的提高和深度學習算法在遙感影像分類方面的成功應用,同時為了更好地向遙感影像自動化、智能化解譯方向發展,大部分研究者把深度學習應用在高分辨率遙感影像分類問題上,其中只有少部分聚焦在國產高分辨率遙感影像分類的研究。目前,利用國外遙感數據在影像分類算法上的研究非常豐富,且趨近于成熟。依據分類的對象,國內遙感數據在影像分類算法上的研究絕大數還停留在基于像元的、混合像元的、面向對象的統計識別分類法和多分類器融合分類法。對應用于國產遙感影像的分類方法的研究進展進行了簡單的展示,如圖1所示。
2.1 基于像元分類技術
圖像與像元是息息相關的,在遙感圖像中,像元是其成像過程中的采樣點和基本單元,其物理意義就是同一像元內的地物灰度值相同且唯一,而數據值代表的地面面積是其幾何意義[6]。基于像元的分類,就是在分類中把單個像元作為研究對象,利用像元的光譜信息、紋理信息、空間關聯等信息對像元表示的地物類別屬性進行判斷[24]。像元的分類方法主要有統計識別分類和分類器融合分類。
2.1.1 基于像元的統計識別分類
基于像元用于遙感影像的統計識別分類比較普遍的方法有監督分類法和非監督分類法。
監督分類又稱訓練分類法,根據訓練區已知遙感信息類型的像元,通過反復訓練、學習建立分類模型,在該模型上對待分類影像進行相同特征像元自動分類。比較常見的監督分類法有最大似然法(Maximum Likelihood Classifier,MLC)[25-26]、支持向量機(Support Vector Machine,SVM)[27-28]、BP神經網絡[29-30]等。
非監督分類是指在事先不知道像元類別特征條件下,按照像元光譜特性的相似度大小進行統計建立分類模型,根據待分類影像總體特征,通過分類模型對其進行預估判斷。比較典型的非監督分類法有K-均值(KMeans)[31]、ISODATA[32-33]等。
2.1.2 基于像元的多分類器融合分類
對于遙感影像某具體物體分類問題,基于像元的統計識別分類方法需要通過不斷地實驗并訓練來找到性能最適合的分類器。這種分類法的不足主要在于當先驗知識不充分時,通常很難去確定最優的分類器,由于分類器的選取尚缺乏統一的理論指導,因此,尋求廣義上提高分類性能的方法成為分類算法的一個研究方向[34]。隨著多分類融合定義的確定及其系統廣泛的應用,多分類器融合的遙感影像分類應用得到充分的發展。多分類器融合又稱多分類器組合、多分類器系統,根據不同的單分類模型對同一研究區域進行訓練學習,把分類效果較好的一種或幾種分類器,利用融合法進行重新組合。按照分類器類別的集成主要分為同質分類器融合法和異質分類器融合法,其中同質分類器融合法的典型算法是隨機森林[35],異質分類器融合法常見的是利用投票法、Bayesian 平均法、模糊識別法等分類器集成方法對多種不同的分類器進行融合。
2.1.3 基于像元在國產遙感影像分類應用中的研究進展
在基于像元的國產遙感影像應用中,研究者們常利用統計識別分類法中的最大似然法,因為其簡單的分類操作和較好的分類效果。最大似然法是指在每個像元數據服從正態分布的前提條件下,通過計算每個像元對各類別的歸屬概率,將該像元分到歸屬概率最大的類別的方法[36]。周翔等人[37]在基于CBERS 影像的土地覆蓋動態監測方法研究中,發現最大似然法較最小距離法的分類效果好。鄭盛等人[38]根據深圳市地類分布的特點,通過目視解譯在遙感影像上選擇感興趣區域作為各地類的訓練樣本,利用最大似然法對三個時期的CBERS和HJ-1B影像進行分類,可以明顯看到土地利用/覆蓋變化。為了進一步探索其他統計識別法的分類精度,Kong等人[39]以河北豐寧縣土地覆蓋的GF-1遙感影像為研究數據,根據光譜特征、融合NDVI 時間序列和物候參數的不同組合利用支持向量機對土地覆蓋進行分類,發現支持向量機的準確率具有很大的優勢。Chen 等人[40]選擇改進的決策樹法對半干旱地區烏蘭蘇海湖水生植被的GF-1 遙感影像進行分類,結果發現該方法在區分水和水生植被方面優于傳統的統計分類方法。為了提高國產影像分類的精度,馬凱等人[41]利用BP 神經網絡的分類算法對黃島區HJ-1A 衛星的高光譜影像進行雙重分類,經處理后的高光譜影像的分類精度得到顯著提高。
與統計識別分類相比,多分類器融合分類方法可以在具體應用中不考慮最優分類器的選取問題,通過融合方法自動獲取強分類模型進行影像分類。針對同質分類器融合的國產影像應用,劉毅等人[42]利用隨機森林法對災害監測預報小衛星(HJ-1)、北京1 號小衛星(BJ-1)多光譜遙感影像進行分類,與最大似然、支持向量機的傳統分類方法進行比較,發現隨機森林具有更好的穩定性、更高的分類精度和更快的運算速度。為了對地物影像進行更好的分類,結合多源影像特征探索隨機森林法的分類效果,Fu等人[43]利用小波主元分析(PCA)圖像融合技術,將多光譜GF-1 和合成孔徑雷達(SAR)圖像融合得到的濕地植被數據進行基于隨機森林算法分類,提高了總體分類精度。呂杰等人[44]針對利用遙感影像進行森林類型識別容易出現樹種誤分和模型復雜的問題,結合遙感判讀樣地、植被指數、紋理信息以及地形因子等多源數據,構建最小距離、支持向量機和隨機森林的分類模型對黑龍江涼水自然保護區森林優勢樹種的高分一號影像進行分類,結果表明結合多源數據的隨機森林模型分類總精度較結合多源數據的支持向量機分類法有明顯提高。針對異質分類器融合的國產影像應用,楊海波等人[45]根據不同空間分辨率的北京1 號和ETM遙感影像數據集,采用基于誤差矩陣的方法對最大似然,最小距離,馬氏距離進行精度評價組成的混合判別多分類器結合算法與各個子分類器進行分類比較,發現混合多分類器結合算法能比較顯著提高不同遙感衛星不同分辨率的中高精度遙感影像的分類精度。彭正林等人[46]選取分類性能以及多樣性好的馬氏距離、SVM和最大似然三種分類器作為子分類器,自定義規則對簡單投票法、最大概率類別法以及模糊類別積分法進行組合對影像分類,結果表明與單個子分類器中精度最高的SVM 分類相比,基于多分類器組合的遙感影像分類總體分類精度提高了12%,Kappa 系數提高了0.12。李志強等人[47]以長春市部分GF-2 影像為實驗數據,對貝葉斯、K-最近鄰、支持向量機、分類回歸樹和隨機森林五種不同分類器根據各地類具有最高Hellden值的分類算法構建多分類器組合,該方法分類精度優于任何單一分類器的分類結果。
2.1.4 基于像元的分類比較
依據基于像元分類的研究進展,對國產遙感影像分類在方法上進行比較分析,從方法中的常見方法、原理、典型算法、對基于像元影像的分類效果及優缺點,每種分類的局限性這些方面做了簡單的概括。如表1所示。
2.2 混合像元分類技術
遙感影像的空間分辨率、時間分辨率和光譜分辨率的相互制約導致了遙感影像中普遍存在著混合像元(即一個像元內有多種地物)[48],混合像元問題不僅影響地物的識別和分類精度,而且是遙感技術向定量化發展的重要障礙[49]。目前對于遙感影像的分類問題多數單考慮像元光譜間的統計特征,而導致分類的誤判,因此在對于含有混合像元的影像分類問題需先進行混合像元分解,其次是分類。

表1 基于像元的分類方法比較
2.2.1 混合像元的分解
混合像元分解是指由像元級達到亞像元級,進入像元內部,將混合像元分解為不同的基本組分單元或端元,并求得這些基本組分單元所占的比例[50]。混合像元的分解模型主要有模糊分解、神經網絡分解、線性分解等,比較常用的是線性分解模型。線性分解模型假設在不同物質間不存在相互作用,位于同一像元區域的波譜是純凈物質波譜的線性組合,是根據它們的組成比例進行加權,獲取線性組合的組成比例就是混合像元分解。混合像元分解的步驟一般分為端元提取和豐度估計。
端元提取是指在混合影像中提取各種成分,包括確定端元數量以及端元的光譜。在建立線性混合模型并對其進行光譜解混操作之前,選擇光譜端元是非常必要的,光譜端元選擇的好壞是混合像素光譜解混效果的關鍵[51]。常見的端元提取法有像元純凈指數法(PPI)、內部最大體積法(N-FINDR)、迭代誤差分析法(AEI)和自動形態學端元提取法(SMEE)。
豐度估計是指對每種估計出來的端元物質的比例加以估計。豐度估計算法最經典的為最小二乘算法,它是通過計算誤差平方和的最小值的思想得到豐度估計矩陣,該算法包括無約束最小二乘法(LS)、和為一約束最小二乘法(SCLS)、非負約束最小二乘法(NCLS)、全約束性最小二乘法(FCLS)[52]。
2.2.2 混合像元的分類
混合像元的分類是在通過混合像元分解技術獲取每個像元或比較均勻的像元組的基礎上,利用分類模型對遙感影像數據進行分類的過程。常用到的分類模型是統計識別的分類模型,較少使用多分類器融合的分類模型。
2.2.3 混合像元在國產遙感影像分類應用中的研究進展
混合像元分解作為影像分類過程中的預處理部分,是保證影像分類效果好的關鍵之一。同時基于像元分類技術已為混合像元的分類研究打好基礎,因此國內外研究者更加傾向于混合像元分解技術的研究。由于國內對混合像元分解研究較晚,且混合像元普遍存在于中低分辨率影像中,隨著我國遙感分辨率的提高,人們對于具有混合像元的國產影像研究更少。對于混合像元的分解應用,金晶等[53]人針對混合像元分解中普遍存在的同物異譜現象所引起的分解精度降低問題,依據模擬的高光譜數據,提出了基于Fisher判別零空間的高光譜遙感影像混合像元分解法,實驗表明該方法能減少端元內光譜差異影響,并精度優于像元純度指數法和樣本光譜算術平均法。付敏[54]以高分遙感數據為研究對象,針對現有解混方法僅考慮了高光譜遙感圖像的光譜信息而忽略了空間信息問題,提出了基于地物依賴性約束的高光譜影像混合像元分解算法,該方法在進行混合像元分解時,以非負矩陣分解為基礎,從圖像全局出發建立地物依賴性約束,使得在解混的過程中高光譜圖像的空間結構得以保持,從而有效提升高光譜混合像元分解的解混精度及魯棒性。崔媛[51]針對傳統非負矩陣分解法中解空間較大、存在大量局部極小值的問題,提出了一種改進的平滑性和稀疏性約束的非負矩陣分解法(INMFSSC),通過對模擬高光譜數據和真實遙感圖像的仿真研究,實驗結果表明,該方法不僅能有效地克服傳統非負矩陣分解法的缺陷,而且能估計出精確的端元和對應的豐度,獲得較好的解混效果。對于混合像元的分類應用,王玲段[55]利用國產HJ-1A衛星的高光譜數據為數據源,以像元純度指數(PPI)的混合像元分解法進行南疆主栽經濟林木識別分解,采用最大似然分類進行分解對象分類,實驗表明,該方法優于典型樣地為單元的方式。周煒等人[56]針對水體邊界易與周邊地物產生混淆而界定困難的問題,利用國產高光譜影像數據,提出一種基于高光譜混合像元分解的水體邊界信息提取方法,實驗表明該方法精度明顯優于水體指數法,略優于支持向量機法。鄭麗[49]以國內研制OMISI(實用型模塊化成像光譜儀系統)高光譜的延安地區地物數據為研究對象,對自動形態學端元提取(AMEE)與像元純度指數(PPI)端元提取后的分類比較,結果表明對AMEE 端元提取線性解混后的豐度圖像進行最大似然分類精度高于PPI端元豐度圖像分類精度,實驗表明支持向量機的分類精度高于傳統最大似然分類。
2.2.4 混合像元分解的方法比較
依據混合像元分類的研究進展,主要對混合像元分解方法中的端元選取法和豐度估計法進行分析,從分解方法的典型算法、原理、對混合像元影像的分解效果及優缺點這些方面做了簡單的概括。如表2所示。
2.3 面向對象分類技術
隨著對地觀測技術的進步以及人們對地球資源和環境的認識不斷深化,高分辨率遙感影像的結構、形狀、紋理和細節等信息的分辨率也隨之提高,傳統的基于像元的影像分類方法只關注影像光譜信息,像元之間相關性差,分類結果具有很大的不確定性,再加上影像本身噪聲的影響使得分類后的影像存在“椒鹽”效應,缺乏影像完整性和連貫性等[57],并不適應高分辨率遙感影像的分類問題。而面向對象分類技術能夠合理運用通過影像分割獲取的高分辨率遙感影像對象中的光譜特征和空間特征,依據分類算法針對目標信息對影像特征進行分類。面向對象分類技術的兩個主要關鍵步驟是遙感影像分割和面向對象的分類。
2.3.1 遙感影像分割
影像分割就是將一幅遙感影像變成若干個具有同質性的對象,這些對象遵循空間上的連續性,并且互相之間不能有重疊的特性[58]。眾多遙感影像分割中,常用于獲取影像對象的方法是多尺度分割。多尺度分割是指對影像信息進行尺度變換,然后結合這些信息來發掘影像中的信息,分析處理發掘出來的信息,來獲得更好的信息提取結果[59]。在分割算法上主要有基于邊界的、基于區域的、基于閾值的[60]、基于超像素的[61]、基于圖論的[62]和基于機器學習的[63]等。基于超像素分割法是按照某種相似度準則,將圖像劃分為若干個不相交的均勻圖像塊,所有的圖像塊組成了整幅圖像[64];基于機器學習分割法是通過無監督學習方法或有監督學習方法進行圖像分割的。其中分割尺度對影像分類結果好壞非常重要,它決定了形成對象的異質度,尺度過大時獲取的影像信息細節不完整,導致用于分類的特征數量過少;尺度過小時獲取的影像信息細節較豐富,導致用于分類的特征數量過于冗余,不具有代表性。
2.3.2 面向對象的分類
面向對象的分類是在影像分割獲取對象的基礎上,利用不同分類模型對遙感影像典型特征進行分類的過程。常用到的分類模型是模糊函數[65],由于其需要事先對閾值進行設置,閾值的過大或小都會造成分類精度的下降,因此提出了統計識別的算法對影像特征分類,常用到的統計識別算法有支持向量機[66]和人工神經網絡[67]等。由于機器學習算法對影像分類需要不斷的訓練和測試,才能挖掘出精度最高的分類器,后來研究者們提出了多分類器融合的分類法。
2.3.3 面向對象在國產遙感影像分類應用中的研究進展
隨著我國遙感技術的不斷提升,研究者們更加傾向于面向對象的影像分類技術應用研究。面向對象分類技術充分利用遙感影像的光譜、紋理、空間信息,使分類效果更加顯著。Chen 等人[68]采用多尺度多特征分割的方法提取影像目標特征,利用加權平均的模糊邏輯分類法進行目標分類,比傳統的基于像素的影像分類效果好。但該方法存在分割尺度和分類閾值無法準確確定的局限,導致分類精度下降。針對面向對象的影像分割尺度問題,劉麗雅[24]根據分割算法選取最優分割尺度,分別利用傳統基于像元的最大似然法與ISODATA法及面向對象的分類法對50、70、90三種最優分割尺度的高寒山區的高分一號影像進行土地利用/覆蓋類型分類,發現當最優分割尺度為50時的面向對象分類法的精度最好。針對分割尺度和分類閾值的局限性,Wu 等人[69]利用面向對象的SVM 對道路影像數據進行分類,該方法的總體分類精度達到92.71%,kappa系數為0.899。針對單分類器分類精度選擇的問題,董心玉[58]對高分一號遙感影像的森林數據分別采用基于C5.0算法的面向對象的自動決策樹分類和面向對象的單層次最鄰近分類法進行對比分析,實驗表明面對對象的多層次決策樹分類方法分類效果較好。Chen 等人[70]結合數學形態學利用面向對象的隨機森林法對長江三峽水庫(TGR)附近滑坡地區的ZY-3 遙感影像進行分類,獲得較高的分類精度。張金盈等人[71]基于多尺度分割算法獲取最優的影像分割對象的主動學習和詞袋模型相結合的高分二號遙感影像分類方法,結果表明,該方法可以有效地將研究區域分為水體、地面、植被和建筑物四類,正確率達到90.6%以上。針對多尺度影像分割方法存在地物邊界依附性差、易受影像噪聲影響等問題,Li 等人[72]對HJ-1/CCD 遙感云影像數據,結合云陰影匹配法和超像素分割算法進行影像分割檢測,云檢測的總體精度接近90%。Tan等人[73]針對云在光學遙感中可以局部遮蔽地表特征并改變反射率問題,提出一種新的基于概率潛在語義分析(PLSA)和基于對象的云檢測的機器學習方法。通過超像素分割線性迭代聚類(SLIC)算法和PLSA 模型對ZY-3 和GF-1 云影像進行特征提取,利用支持向量機進行影像分類,實驗表明該方法比傳統的光譜影像提高了6.8%,且該方法能夠自動、準確地實現目標識別。
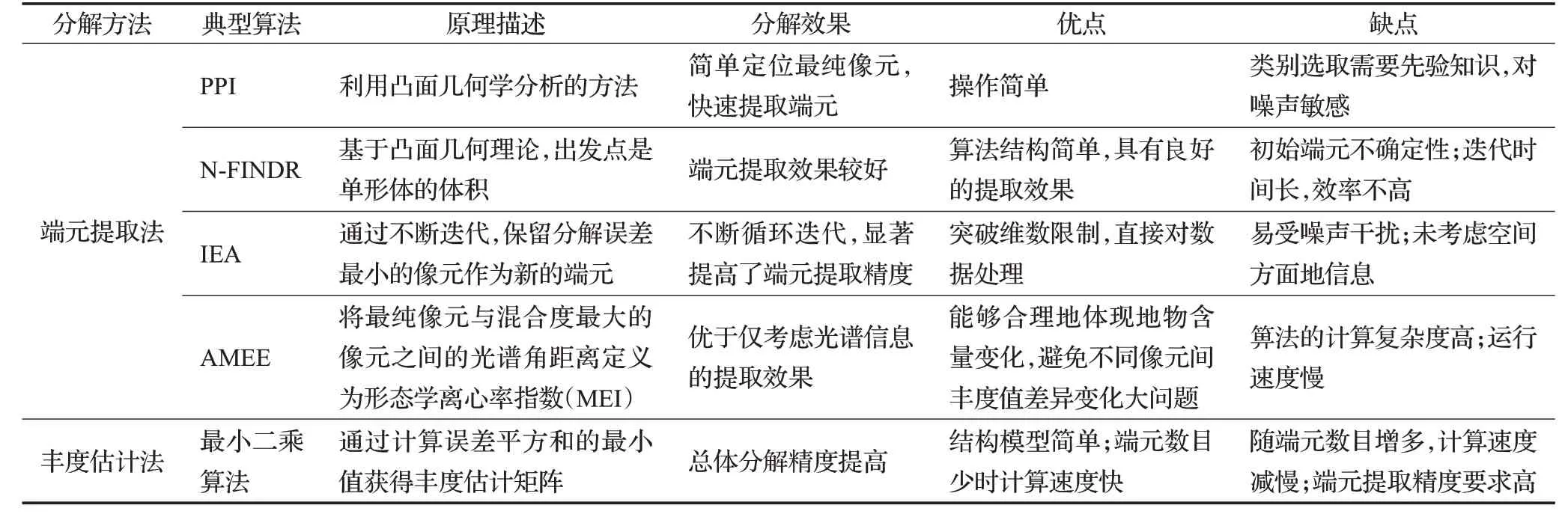
表2 混合像元分解方法的比較
2.3.4 面向對象的分割方法比較
依據面向對象分類的研究進展,對遙感影像的分割方法進行比較分析,從分割方法的常見方法、原理、典型算法、對影像的分割效果及優缺點這些方面做了簡單的概括。如表3所示。
2.4 基于深度學習分類技術
2006 年,加拿大多倫多大學教授Hinton 首次在數據的應用上引入深度學習思想,為大數據技術、人工智能應用的實現提供可能[74]。深度學習是機器學習的一個分支,是通過建立類似于人腦的分層模型結構,對輸入數據逐級提取從底層到高層的特征,從而很好地建立從底層信號到高層語義的映射關系[75-76]。2013 年,ImageNet 大賽中前20 名算法都采用了深度學習,可見深度學習在圖像領域中取得了絕對的優勢[77]。深度學習能較好地解決基于像元的、混合像元的和面向對象的影像分類法難以適應高分辨率影像的高維數據、難以從高分辨率影像的大數據中選取合適的分類器、自動化程度不高的問題,及對于通過人工設計的像元特征的費時性和專家知識的依賴性。目前,應用在遙感影像分類方面的深度學習模型主要有深度置信網絡(Deep Belief Network,DBN)[78]、卷積神經網絡(Convolutional Neural Network,CNN)[79]和棧式自編碼器網絡(Stacked Autoencoder Network,SAE)[80]。神經網絡是深度學習的基礎;DBN的出現不僅掀起了深度學習的浪潮,而且加快了深度學習的發展;CNN 是深度學習最具有代表性的模型[81];SAE是深度學習在算法上的優化模型。
深度置信網絡是建立在樣本數據和標簽之間的聯合分布的概率生成模型,由多層受限玻爾茲曼機(RestrictedBoltzmann Machine,RBM)和一層某種分類器組合而成[82],每層之間用隱層單元連接用來捕捉可視層的高階數據間的關聯性,其中網絡層的一個DBN 的連接是通過自頂向下的生成權值來指導確定的。

表3 影像分割的方法比較(多尺度分割)
卷積神經網絡是深度神經網絡(Deep Neural Network,DNN)的改進模型,不僅具有DNN 分層提取非線性特征的特點,而且能夠識別圖像的空間特征[83]。卷積神經網絡實際上就是將圖像處理和神經網絡結合得來的,不是像DNN把所有上下層神經元直接連接起來,而是通過卷積核將上下層進行鏈接,同一個卷積核在所有圖像中是共享的,圖像通過卷積操作后仍然保留原先的位置關系。CNN 主要由輸入層、若干組交替出現的卷積層與下采樣層、全連接層及輸出層等基本結構構成。它具有適用性強、分類并行處理能力、權值共享等優點,使得全局優化訓練參數大大減少[84-85],在深度學習領域當中,卷積神經網絡研究的最多,已成為當前圖像識別領域的研究熱點[86]。
2007年,Bengio等人[87]在構成DBN的基礎上,針對隨機初始化產生的基于梯度的優化方法問題提出一種深層網絡的貪婪逐層預訓練方法——棧式自動編碼器網絡。它是一個由多層無監督學習的稀疏自編碼器結構單元層疊后組成的深度神經網絡[88],其前一層自編碼器的輸出作為其后一層自編碼器的輸入,最后一層是個分類器。在遙感領域,SAE對光譜空間特征學習能力尤為突出[89-90]。
2.4.1 基于深度學習在國產遙感影像分類應用中的研究進展
國產遙感影像分類應用中,運用最多的深度學習算法是CNN,該方法的特點是影像到影像的端對端學習模型,在該模型基礎上可以延伸出對于影像分類效果更好的模型,如深度卷積神經網絡(DCNN)和全卷積神經網絡(FCN)。針對傳統分類方法不能達到較好的分類效果的問題,Ding 等人[91]利用SAE 對土地覆被的GF-1遙感影像進行分類,實驗表明其分類精度均高于支持向量機和反向傳播神經網絡。為了解決單獨的深度學習算法分別對高分辨遙感影像分類存在時間復雜度較高、樣本數據較少、小物體識別差的問題,Yang 等人[92]提出了對多通道數據拼接方法和DCNN 結構以及深度學習特有的拼接邊緣效應進行優化的方法對GF-1影像進行分類,改進后的方法能很好地改善高分辨影像的分類精度且時間復雜度較低。Wang等人[93]在樣本規模較小的情況下,根據樣本遷移方法,利用殘差學習網絡(ResNet)提取GF-2 遙感影像的深度特征和低層特征(包括顏色矩特征和灰度共生矩陣特征)來構造各種場景語義特征,再利用SVM 進行影像的高精度分類。宋廷強等人[94]基于GF-2遙感影像提出一種基于SegNet架構改進的網絡模型AA-SegNet,增加了增強的空間金字塔池化模塊和空間注意力融合模塊來分別進行小目標提取和指導低特征圖,該方法與深度學習方法Seg-Net、Deep-Labv3和U-Net進行比較,提高了識別的精準度。為了充分利用影像信息提高分類精度,Li等人[95]設計了基于殘差卷積塊(ResNet50)和金字塔池化模塊的多尺度提取網絡進行建筑區域的更多判別特征提取,引入焦點損失項進一步提取小規模建筑區域,利用GF-3 SAR數據對該方法進行驗證,發現充分利用遙感影像特征的深度學習技術在影像信息分類中具有一定的優勢。對于特殊影像單獨利用深度學習算法也是不可行的,需要根據特定情況進行算法的結合或改進。樓立志等人[96]為了解決船只緊密相連、不同形狀、類型的船只、船只過小等問題,運用可變形部件模型(DPM)的和基于區域卷積網絡(R-CNN)的船只檢測方法對GF2 遙感船只影像進行監測,發現DPM和R-CNN都能以高召回率和正確率檢測水中的船只,但對于聚集船只而言,DPM 的效果更優。裴亮等人[97]提出了基于改進的深度學習全卷積神經網絡的資源三號遙感影像云檢測方法,該方法檢測精度和速度均優于傳統方法(FCN-8s、FCN-16s、FCN-32s、FCN-SVM),準確率可達90.11%,單張影像檢測耗時可縮短至0.46 s。Chen等人[98]設計了一種基于超像素分割的新的多卷積神經網絡(MCNN)對ZY-3、GF-1 和GF-2 遙感影像進行云檢測,結果表明該方法可以檢測多層云,獲得高精度的高分辨率遙感影像。Cheng等人[99]針對傳統深度學習方法對水產養殖區域的誤判問題,結合U-Net 和混合擴容卷積(HDC)模型(混合擴容卷積U-Net(HDCUNet)),進行接受域擴展,并與FCN-8s、SegNet、U-Net 和Threshold Segmentation(TS)四種方法的提取精度進行比較,驗證了HDCUNet 能獲取高精度水產養殖區域目標。
2.4.2 基于深度學習的分類方法比較
基于深度學習應用上的研究進展,對影像分類進行方法上的比較分析,從方法原理、分類效果及方法優缺點這些方面做了簡單的概括。如表4所示。
3 國產遙感影像分類應用中存在的問題與發展趨勢
為了簡化特定目標對單個分類器的選擇,在基于像元的和混合像元的統計識別分類基礎上提出了多分類器融合分類技術,這并沒有解決基于像元分類的和混合像元的本質缺陷,因此提出了面對對象分類技術,這些分類技術都屬于淺層的機器學習方法,并不能深層次挖掘出和學習到遙感影像信息。隨著深度學習的廣泛應用,基于深度學習的分類技術被提出,該方法能夠自動學習遙感影像的特征信息,實現分類的自動化。面對遙感影像分類技術的更新迭代,分類技術雖然在不斷改善,但仍存在不少問題,本文主要針對遙感影像數據和分類技術兩方面進行論述。

表4 深度學習的分類方法比較
(1)遙感影像的特殊性(密集性、高維特性及場景特殊性)會影響深度學習模型分類效果;遙感影像常常會存在標簽樣本不足情況,這會導致淺層機器學習模型和深度學習模型無法充分訓練,使其分類效果不佳。
(2)混合像元分解技術可以分解出多種地物類型組成的像元,分類精度雖優于基于像元分類技術,由于很難獲取高精度端元數據,仍不能解決“同物異譜”“同譜異物”等現象。
(3)面向對象的分類技術雖然能充分運用遙感影像上的特征信息,但在影像分割問題上并沒有一個統一有效的分割方法,不同影像分類需要采用不同的分割方法,不具有普遍性;在分類問題上,也需要進行最優分類器的選取,難以保證遙感影像達到最好的分類效果。
(4)基于深度學習的分類技術在處理高分辨遙感影像分類問題優勢顯著,但深度學習理論在國產遙感影像分類的應用并不完善,即網絡結構選取目前尚沒有完善的理論依據,而且對于不同深度學習的算法,其網絡結構也不盡相同,也適應不同的影像分類目標。
結合上述國產遙感影像分類應用中存在的問題,可以看到未來國產遙感影像在分類應用中的發展趨勢如下:
(1)面向對象分類技術的改進和完善。深入投入到面向對象分類技術研究中,尋找最適合的影像分割方法或對原有方法進一步改進;分類問題可能會趨向于多分類器融合的方式。
(2)深度學習模型的深入研究和應用。結合國產高分辨率遙感影像對深度學習模型向更深層次和復雜的網絡結構展開研究,針對不同深度學習算法挖掘出影像分類應用中內部間的關聯關系,以實現提高模型的學習能力,達到更高的分類效果。
(3)遙感實時監測分析服務云平臺搭建。在數據加工應用階段,行業模型、算力缺失,國外專業軟件的大量使用,不自主可控導致的風險比較高。隨著航天器測控管理與空間信息應用服務平臺——“航天云立方”在華為云上穩定運行,在數據服務的基礎建設和云平臺的布局上,未來將會更注重于遙感大數據的挖掘與分析,把大數據預測與決策服務搬到平臺服務上,形成動態地球平臺,及時洞察地表變化信息。
(4)AI遙感。華為云GeoGenius-遙感智能體在遙感產業高峰論壇的亮相,表示著在云+AI+5G的推動下,AI遙感將成為下一個最具普惠價值的AI應用。其中華為云能夠降低遙感衛星行業數據存儲和計算成本,AI 技術能夠大幅減少分析和處理圖像的時間以及創造更多新型應用場景,5G 能夠保證從云端提取大量數據的效率和速度。
4 結束語
隨著我國綜合實力的不斷提高和遙感影像應用場景的越來越廣,實現我國遙感技術的獨立自主性應用顯得越來越重要。就目前國產遙感影像分類技術仍主要集中在基于像元的、混合像元的和面向對象的分類技術中,由于這三種分類技術在國產影像應用中相對成熟,分類效果也不錯,為了提高分類精度進行相應的改進也比較容易。國產遙感影像在運用深度學習技術方面就顯得比較青澀,主要是因為深度學習理論研究的不完善,其次是對國產遙感影像深入研究的專家較少。本文綜述首先回顧了國產遙感影像分類的研究背景,及簡單介紹了應用于國產遙感影像分類的方法;其次分別對國產六個系列遙感衛星數據進行簡要概述;接著描述了國產遙感影像四種分類方法,基于每種方法對在影像分類應用中的研究進展進行了歸納,并分別對國產遙感影像分類進行了方法上的對比分析;最后總結了現如今國產遙感影像分類應用中存在的主要問題及對未來發展趨勢進行了探討。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34