棒磨機自動給礦控制系統(tǒng)應(yīng)用研究
2021-02-05 12:46:56
礦山機械 2021年1期
江西環(huán)境工程職業(yè)學(xué)院汽車機電學(xué)院 江西贛州 341000
棒磨機磨礦控制是選礦廠生產(chǎn)過程中至關(guān)重要的部分,其工作效率與控制水平將直接影響選礦廠的精礦回收率與能耗水平[1]。由于我國選礦自動化起步較晚,磨礦自動化控制基本處于初級階段,磨礦控制環(huán)節(jié)一直還停留在人工操作控制階段[2];又由于各礦山選礦廠對自動控制技術(shù)認可度不同,以及現(xiàn)場操作工技術(shù)水平相差較大,導(dǎo)致各選廠自動化水平參差不齊,這些都制約著磨礦自動化水平的提高和磨礦效益的改善。因此,改善棒磨機自動化水平是實現(xiàn)磨礦節(jié)能降耗、提升效益的重要手段。
1 磨礦控制技術(shù)現(xiàn)狀
目前,我國大多鎢選礦廠棒磨機自動控制水平相對落后,磨礦生產(chǎn)過程中存在環(huán)境惡劣、勞動強度大、能耗高、效率低且很不穩(wěn)定等突出問題。經(jīng)調(diào)研,磨礦操作還處在純手動控制階段,這種控制方式由于受操作人員經(jīng)驗和責(zé)任心等因素影響,造成給礦波動大,難以保證磨礦的穩(wěn)定,棒磨機生產(chǎn)過程中常出現(xiàn)“脹肚”或“不飽”現(xiàn)象[3]。磨礦過程如果不斷增加棒磨機的給礦量,很容易造成棒磨機過負荷工作,使磨礦產(chǎn)品不達標(biāo),影響后續(xù)選礦工藝的選出效率,情況嚴重時可能還會損壞設(shè)備;相反,為了防止棒磨機過負荷,將磨機給礦量一味降低,又容易造成磨礦工段生產(chǎn)效率過低,導(dǎo)致棒磨機耗電量增加,企業(yè)用電成本升高,影響整個選礦廠的處理量[4];如果磨礦現(xiàn)場操作工長期在高勞動強度和噪聲下工作,還會對工人身體健康造成較大影響。針對以上情況,急需引入先進控制理論和控制方法來改善棒磨機自動控制水平,使磨礦工段能長期、穩(wěn)定地運行,保證礦山生產(chǎn)效率最大化,提高礦山企業(yè)的經(jīng)濟效益。
2 棒磨機監(jiān)控形式
本控制系統(tǒng)根據(jù)棒磨機流程分布情況,結(jié)合選礦工藝的監(jiān)測控制需求,確定系統(tǒng)監(jiān)測的主要對象有擺式給料機給礦量,棒磨機供水流量,棒磨機工作時的磨音、功率和礦漿質(zhì)量分數(shù),以及部分相關(guān)泵池的液位等。系統(tǒng)控制的主要對象有擺式給料機驅(qū)動電動機轉(zhuǎn)速,棒磨機給水控制閥開度,部分礦用水泵的開關(guān),螺旋分級機補加水閥門開度等[5]。結(jié)合選礦廠生產(chǎn)管理實際情況,形成智能控制、遠程人工控制及本地人工控制 3 種工作形式。根據(jù)磨礦工段工藝流程,首先對設(shè)備的啟停控制進行必要的設(shè)備自鎖及設(shè)備間互鎖。建成后的系統(tǒng)默認運行在智能控制狀態(tài),為了應(yīng)對生產(chǎn)過程中的突發(fā)情況,系統(tǒng)亦可采取遠程人工控制以及本地人工控制等形式。
磨礦自動控制系統(tǒng)硬件組成如圖 1 所示,整個硬件系統(tǒng)主要由 3 級組成:一級為遠程工業(yè)控制計算機 (或稱上位計算機),一級為現(xiàn)場 PLC 控制系統(tǒng),另一級為手機小程序。PLC 采集棒磨機數(shù)據(jù)并進行運算,遠程工控機主要將 PLC 數(shù)據(jù)顯示出來并存入數(shù)據(jù)庫,手機小程序則通過移動端可方便查詢到工控機數(shù)據(jù)庫的數(shù)據(jù)。
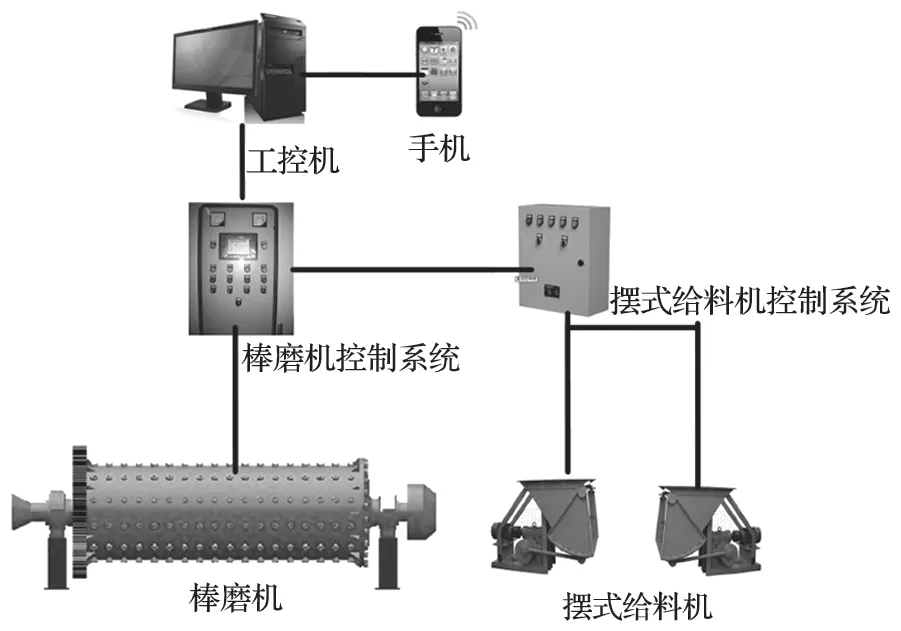
圖1 磨礦自動控制系統(tǒng)硬件組成Fig.1 Hardware composition of grinding automatic control system
3 磨礦控制系統(tǒng)結(jié)構(gòu)組成
棒磨機控制系統(tǒng)采用可編程控制器 (PLC)、工控機、威綸通 TK6070 系列觸摸屏為核心控制單元,包括時序控制系統(tǒng)、擺式給料機變頻器控制系統(tǒng)、通信系統(tǒng)和手機端顯示系統(tǒng)等[6]。系統(tǒng)結(jié)構(gòu)組成如圖 2 所示。
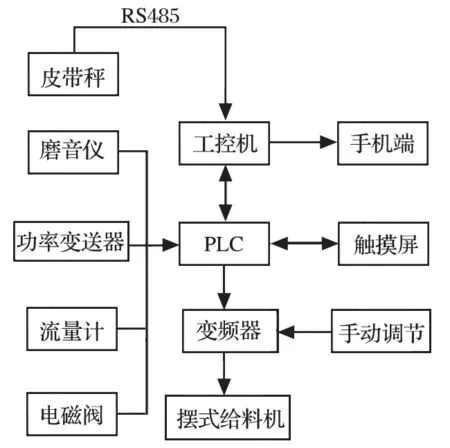
圖2 磨礦控制系統(tǒng)結(jié)構(gòu)Fig.2 Structure of grinding control system
為保證整個棒磨機控制系統(tǒng)供電穩(wěn)定,平常采用市電為磨礦控制系統(tǒng)供電,如出現(xiàn)停電或供電系統(tǒng)不穩(wěn)定,控制系統(tǒng)自動切換成不間斷電源 (UPS),防止生產(chǎn)過程中系統(tǒng)數(shù)據(jù)丟失和棒磨機控制系統(tǒng)癱瘓等危險事故發(fā)生。整個供電系統(tǒng)由空氣開關(guān)、穩(wěn)壓器、UPS 和電源防雷保護器等電氣元件組成,如圖 3 所示。
本項目主要控制對象是擺式給料機給礦量,圖 4所示為變頻器控制擺式給料機電氣圖,整個回路主要由斷路器、變頻器、交流接觸器等組成,采用 1 臺功率為 3.7 kW 的臺達變頻器通過切換互鎖控制 2 臺 2.2 kW 的擺式給料機,擺式給料機給礦量通過變頻器控制電動機的轉(zhuǎn)速實現(xiàn)調(diào)節(jié),圖 5 所示為擺式給料機控制線路圖。
4 棒磨機控制系統(tǒng)的應(yīng)用
鎢礦棒磨機自動控制系統(tǒng)的主要控制單元分為兩大部分:一部分是給礦量的控制,另一部分是排礦質(zhì)量分數(shù)的控制。棒磨機給礦量的控制主要通過采集棒磨機的磨音和功率,經(jīng)過系統(tǒng)的數(shù)據(jù)分析來判斷棒磨機負荷,同時采集螺旋分級機的電流,據(jù)此形成返砂比參數(shù)[7]。核心控制系統(tǒng)根據(jù)當(dāng)前棒磨機采集的磨音信號、磨機的功率值以及螺旋分級機電流值來判斷棒磨機當(dāng)前的運轉(zhuǎn)狀態(tài),并進行動態(tài)實時計算,得出當(dāng)前給礦量值。通過對該值和皮帶稱檢測的給礦量進行數(shù)據(jù)運算對比,可編程控制器將運算控制信號輸出至變頻調(diào)節(jié)單元,調(diào)節(jié)變頻器的輸出頻率,進而通過改變?nèi)喈惒诫妱訖C的轉(zhuǎn)速來改變擺式給料機的擺動速度,從而將給礦量控制在最佳范圍內(nèi)。系統(tǒng)亦可通過采集的數(shù)據(jù)進行磨機過負荷保護的判斷,在過負荷狀態(tài)下適時停止對系統(tǒng)給礦。給礦量控制單元結(jié)構(gòu)框圖如圖 6 所示。

圖3 供電系統(tǒng)組成Fig.3 Composition of power supply system

圖4 擺式給料機電氣圖Fig.4 Electrical diagram of pendulum feeder

圖5 擺式給料機控制線路圖Fig.5 Control circuit diagram of pendulum feeder

圖6 給礦量控制單元結(jié)構(gòu)框圖Fig.6 Block diagram of feeding amount control unit
系統(tǒng)智能控制狀態(tài)是由其核心控制部件可編程控制器來實現(xiàn)的,在保證前端粗破碎處理完成的情況下,操作人員在人工開啟部分設(shè)備后,只需將系統(tǒng)設(shè)置成智能控制并開啟系統(tǒng),系統(tǒng)即可依據(jù)采集的各設(shè)備及流程參數(shù),智能控制各個可調(diào)控裝置的頻率、開度和開關(guān)等參數(shù),使磨礦工段的各設(shè)備運行在最佳工作狀態(tài)。操作人員可通過現(xiàn)場觸摸屏或上位計算機觀測系統(tǒng)運行狀態(tài),當(dāng)納入本系統(tǒng)監(jiān)測范圍內(nèi)的設(shè)備發(fā)生故障,或其他設(shè)備運行參數(shù)超出預(yù)設(shè)生產(chǎn)閾值時,系統(tǒng)將發(fā)出聲光報警,提示操作人員及時進行設(shè)備檢修與系統(tǒng)維護[8]。
遠程人工控制狀態(tài),主要是通過上位機來實現(xiàn)人工控制,操作人員根據(jù)現(xiàn)場實時圖像在確保安全的情況下,實現(xiàn)已接入系統(tǒng)的可控制設(shè)備的啟動與停止。該控制方式主要用于特殊生產(chǎn)工藝條件下,對智能控制過程進行人為干預(yù),以保證生產(chǎn)效率最大化與產(chǎn)品質(zhì)量最優(yōu)。
本地人工控制狀態(tài),主要是由操作人員在設(shè)備安裝現(xiàn)場對緊急情況的應(yīng)急控制。操作人員首先通過切換系統(tǒng)主控制柜的遠程/本地切換開關(guān),將設(shè)備默認的遠程工作狀態(tài)切換為本地工作狀態(tài),再通過設(shè)備的啟停按鈕對設(shè)備進行人工控制。該控制方式主要用于出現(xiàn)緊急情況時的應(yīng)急控制,或者在設(shè)備檢修期間的按需控制。當(dāng)系統(tǒng)工作狀態(tài)切換為本地工作狀態(tài)時,現(xiàn)場的人工手動操作方式具有最高的系統(tǒng)操作等級權(quán)限,為確保安全,此時系統(tǒng)無法進行遠程自動與人工控制,只能查看設(shè)備的工作狀態(tài)信息。
根據(jù)選廠棒磨機工藝流程,通過組態(tài)王監(jiān)控軟件在上位機上以動畫、圖片、聲音等形式動態(tài)模擬監(jiān)控各設(shè)備的生產(chǎn)運行狀況,主要界面包括登錄、用戶管理、參數(shù)設(shè)定、報警、實時數(shù)據(jù)報表、歷史數(shù)據(jù)報表、退出系統(tǒng)等。棒磨機磨礦生產(chǎn)工藝流程監(jiān)控主畫面如圖 7 所示,畫面實時顯示棒磨機整個工藝設(shè)備的工作狀態(tài)和主要參數(shù),包括給礦量、給水量、磨音、棒磨機功率、閥門開度、擺式給料機給礦頻率、棒磨機運行狀態(tài)等[9]。
圖8 所示為棒磨機控制系統(tǒng)的實時數(shù)據(jù)報表,實時顯示棒磨機磨礦生產(chǎn)過程中的給礦量、給水量、棒磨機電耗等數(shù)據(jù),以及整個磨礦生產(chǎn)系統(tǒng)的運行狀態(tài),可以方便用戶整體查看與控制。

圖7 棒磨機磨礦生產(chǎn)工藝流程監(jiān)控主畫面Fig.7 Main monitoring interface of grinding process with rod mill
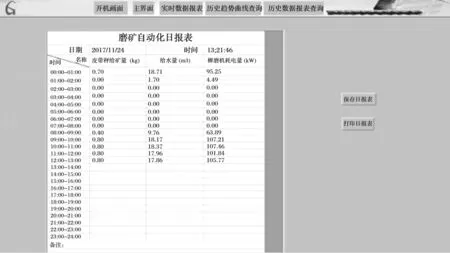
圖8 棒磨機控制系統(tǒng)實時數(shù)據(jù)報表Fig.8 Real-time data report of control system for rod mill
5 結(jié)語
通過該棒磨機自動控制系統(tǒng)的生產(chǎn)運行,大大減輕了操作人員的勞動強度,實現(xiàn)了磨礦生產(chǎn)的科學(xué)管理,提高了企業(yè)經(jīng)濟效益,并且該控制系統(tǒng)具有一定的擴展空間,適用于將來的升級優(yōu)化。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學(xué)科學(xué)(學(xué)生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
電子制作(2018年11期)2018-08-04 03:26:08
中國軍轉(zhuǎn)民(2017年6期)2018-01-31 02:22:28
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
