3WP-200型植保機(jī)器人噴灑擺動(dòng)機(jī)構(gòu)設(shè)計(jì)與試驗(yàn)
2021-02-08 07:17:20張義勝宮玉敏刁培松侯心愛
農(nóng)業(yè)開發(fā)與裝備 2021年1期
張義勝,宮玉敏,刁培松,劉 琦,侯心愛,郭 剛
(1.淄博市農(nóng)業(yè)機(jī)械研究所,山東淄博 255086;2.山東理工大學(xué),山東淄博 255000;3.山東魯虹農(nóng)業(yè)科技股份有限公司,山東曲阜 273100)
0 引言
隨著農(nóng)業(yè)種植結(jié)構(gòu)的調(diào)整和農(nóng)業(yè)機(jī)械規(guī)模化生產(chǎn)的提高以及國家農(nóng)機(jī)購置補(bǔ)貼政策的實(shí)施,現(xiàn)代化的植保機(jī)械越來越被農(nóng)戶所需要,該行業(yè)正在進(jìn)入一個(gè)飛速發(fā)展的時(shí)期[1]。
傳統(tǒng)的噴藥方式采用人工式噴藥,不僅工作強(qiáng)度大、噴藥不均勻,且可能出現(xiàn)重噴、漏噴等情況,無法保證噴霧質(zhì)量,對(duì)環(huán)境也會(huì)產(chǎn)生一定的污染,使作物產(chǎn)生抗藥性,增加作物感染寄生蟲的風(fēng)險(xiǎn),還會(huì)造成直接或間接的人體傷害[2]。
農(nóng)作物病、蟲、害防治是勞動(dòng)強(qiáng)度最大的田間勞動(dòng)[3]。植保機(jī)器人作為一種高效的施藥機(jī)械,與傳統(tǒng)的施藥機(jī)具相比,它的出現(xiàn)不僅極大地減輕農(nóng)戶的勞動(dòng)強(qiáng)度,還大大地提高農(nóng)戶的工作效率,實(shí)現(xiàn)化肥減量提效、農(nóng)藥減量控害并避免了藥液在空氣中散播造成人員中毒的危險(xiǎn),同時(shí)明顯減輕對(duì)土壤污染[4]。
廣大的山區(qū)或丘陵地區(qū),種植地塊面積小,道路狹窄,大型植保機(jī)械不方便進(jìn)入土地作業(yè),因此,小型智能植保機(jī)器人,具有廣闊的市場(chǎng)前景。
市場(chǎng)上常用小型智能植保機(jī)器人噴灑裝置擺動(dòng)結(jié)構(gòu)之一,采用連桿機(jī)構(gòu)。針對(duì)連桿機(jī)構(gòu)運(yùn)轉(zhuǎn)不平穩(wěn)、死點(diǎn)、急回運(yùn)動(dòng)特征、尺寸較大等缺點(diǎn),設(shè)計(jì)了一種齒輪傳動(dòng)擺動(dòng)機(jī)構(gòu),取代連桿擺動(dòng)機(jī)構(gòu)。
1 連桿機(jī)構(gòu)噴灑擺動(dòng)裝置
如圖1所示,市場(chǎng)上常用小型智能植保機(jī)噴灑裝置的結(jié)構(gòu),由擺動(dòng)機(jī)構(gòu)、電機(jī)護(hù)罩、電機(jī)、減速機(jī)、噴灑裝置固定板、噴灑機(jī)構(gòu)組成。
如圖2所示,擺動(dòng)機(jī)構(gòu)總成由螺栓、電機(jī)擺動(dòng)拉桿、連接桿、關(guān)節(jié)軸承、螺母、噴灑機(jī)構(gòu)與擺動(dòng)機(jī)構(gòu)連接桿等組成。
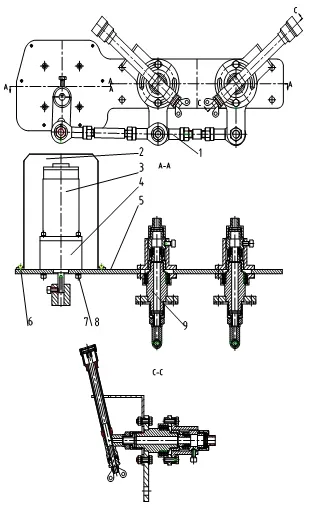
圖1 連桿機(jī)構(gòu)噴灑擺動(dòng)裝置
2 齒輪機(jī)構(gòu)噴灑擺動(dòng)裝置
如圖3所示,噴灑裝置采用齒輪傳動(dòng)擺動(dòng)機(jī)構(gòu),去掉了連桿機(jī)構(gòu)。更換了噴灑機(jī)構(gòu)固定板,增加了電機(jī)主動(dòng)齒輪、噴灑機(jī)構(gòu)被動(dòng)齒輪A、噴灑機(jī)構(gòu)被動(dòng)齒輪B、一個(gè)被動(dòng)齒輪介輪A、一個(gè)被動(dòng)齒輪介輪B。

圖2 擺動(dòng)機(jī)構(gòu)總成
圖4為電機(jī)主動(dòng)齒輪結(jié)構(gòu),外圈為不完全齒,特點(diǎn)是只保留一部分齒,對(duì)稱保留了兩個(gè)略小于90°范圍的齒。在沒有齒的區(qū)域,齒輪空轉(zhuǎn),不傳遞動(dòng)力。
圖5為噴灑機(jī)構(gòu)被動(dòng)齒輪A、B結(jié)構(gòu)。
被動(dòng)齒輪A、被動(dòng)齒輪B、被動(dòng)齒輪介輪A、被動(dòng)齒輪介輪B的外圈為全齒結(jié)構(gòu)。
電機(jī)主動(dòng)齒輪與噴灑機(jī)構(gòu)被動(dòng)齒輪A、B的齒數(shù)、模數(shù)完全一樣,即分度圓直徑大小一樣。
被動(dòng)齒輪A、B分別安裝在噴灑機(jī)構(gòu)的兩個(gè)轉(zhuǎn)子上,帶動(dòng)兩個(gè)噴槍的轉(zhuǎn)動(dòng)。
介輪A、介輪B用來改變被動(dòng)齒輪A、B的轉(zhuǎn)向。
圖6為介輪B安裝圖。介輪B通過固定螺母、墊圈、軸承、軸用彈性擋圈、傳動(dòng)軸安裝在固定板上。
圖7為介輪A安裝圖。介輪A通過固定螺母、墊圈、軸承、軸用彈性擋圈、傳動(dòng)軸安裝在固定板上。
3 齒輪傳動(dòng)擺動(dòng)機(jī)構(gòu)工作原理
如圖3所示,按照電機(jī)順時(shí)針方向轉(zhuǎn)動(dòng)設(shè)計(jì),主動(dòng)齒輪帶動(dòng)被動(dòng)齒輪A逆時(shí)針方向轉(zhuǎn)動(dòng),由于介輪A的緣故,被動(dòng)齒輪B也逆時(shí)針方向轉(zhuǎn)動(dòng),共同帶動(dòng)噴灑機(jī)構(gòu)的噴槍向左邊轉(zhuǎn)動(dòng),此時(shí)介輪B空運(yùn)轉(zhuǎn)。
圖3所示位置,為噴槍左極限位置,電機(jī)主動(dòng)齒輪下部90°范圍的齒已經(jīng)工作完畢。
此時(shí),電機(jī)主動(dòng)齒輪上部90°范圍的齒開始和介輪B接觸,介輪B始終和被動(dòng)齒輪B接觸,由于介輪B的緣故,被動(dòng)齒輪B開始順時(shí)針方向轉(zhuǎn)動(dòng),同樣由于介輪A的緣故,被動(dòng)齒輪A也開始順時(shí)針方向轉(zhuǎn)動(dòng),共同帶動(dòng)噴灑機(jī)構(gòu)的噴槍向右邊轉(zhuǎn)動(dòng)。

圖3 齒輪擺動(dòng)機(jī)構(gòu)

圖5 被動(dòng)齒輪A、B結(jié)構(gòu)圖

圖6 介輪B安裝圖
圖8所示位置,為噴槍在右極限位置。此時(shí),電機(jī)主動(dòng)齒輪上部90°范圍的齒開始和介輪B脫離接觸,電機(jī)主動(dòng)齒輪下部90°范圍的齒開始和被動(dòng)齒輪A接觸,擺動(dòng)機(jī)構(gòu)帶動(dòng)噴灑機(jī)構(gòu)開始向左邊轉(zhuǎn)動(dòng),進(jìn)入下一個(gè)擺動(dòng)循環(huán)。
電機(jī)主動(dòng)齒輪轉(zhuǎn)動(dòng)一圈,帶動(dòng)擺動(dòng)機(jī)構(gòu),使噴槍從左極限位置移動(dòng)到到右極限位置,完成一個(gè)擺動(dòng)循環(huán)。
在電機(jī)的帶動(dòng)下,通過齒輪傳動(dòng),帶動(dòng)噴灑機(jī)構(gòu)的噴槍左右來回?cái)[動(dòng)。由于齒輪傳動(dòng)是連續(xù)傳動(dòng),故擺動(dòng)機(jī)構(gòu)運(yùn)轉(zhuǎn)平穩(wěn),結(jié)構(gòu)尺寸緊湊,克服了連桿機(jī)構(gòu)存在的死點(diǎn),急回運(yùn)動(dòng)特征,尺寸大等缺點(diǎn)。

圖7 介輪A安裝圖

圖8 噴槍在右極限位置
4 齒輪擺動(dòng)機(jī)構(gòu)零部件的設(shè)計(jì)
4.1 擺動(dòng)電機(jī)的選擇
參考同類型電機(jī)的功率,采用直流小型齒輪減速電機(jī),電機(jī)型號(hào)為3DCD24-40-30型,功率40 W,電壓24 V,轉(zhuǎn)速3 000 rpm。減速機(jī)型號(hào)為3GN120K,減速比120,即減速機(jī)輸出轉(zhuǎn)速為25 rpm。
4.2 電機(jī)主動(dòng)齒輪
電機(jī)主動(dòng)齒輪的結(jié)構(gòu),如圖4所示,齒輪分度圓直徑為:

式中:d1—主動(dòng)齒輪分度圓直徑(mm);
m—齒輪模數(shù),選用1;
z1—主動(dòng)齒輪齒數(shù),設(shè)計(jì)為90;
計(jì)算分度圓直徑為90 mm。
電機(jī)主動(dòng)齒輪的外圈保留一部分齒,對(duì)稱保留了兩個(gè)72度范圍的齒,即保留19×2=38個(gè)齒,其余齒去掉。
主動(dòng)齒輪的內(nèi)孔與電機(jī)軸用平鍵聯(lián)接,用于傳遞動(dòng)力。
電機(jī)主動(dòng)齒輪的寬度設(shè)計(jì)為10 mm。
在沒有齒的區(qū)域,與被嚙合的齒輪沒有接觸,齒輪空轉(zhuǎn),不傳遞動(dòng)力。
由于電機(jī)主動(dòng)齒輪對(duì)稱保留了兩個(gè)小于90°范圍的齒,主動(dòng)齒輪上半部齒在脫離被動(dòng)齒輪A時(shí),其下半部齒和介輪B尚未接觸;同樣,電機(jī)主動(dòng)齒輪下半部齒在脫離介輪B時(shí),其上半部齒和被動(dòng)齒輪A尚未接觸;在以上兩個(gè)位置時(shí),噴灑裝置噴槍處于短暫停止擺動(dòng)狀態(tài),這樣設(shè)計(jì)的目的是避免傳動(dòng)干涉。
4.3 被動(dòng)齒輪
被動(dòng)齒輪A、B的齒數(shù)、模數(shù)與電機(jī)主動(dòng)齒輪完全相同。
如圖5所示,被動(dòng)齒輪A、B用兩個(gè)螺栓與噴灑機(jī)構(gòu)連接在一起,帶動(dòng)噴灑機(jī)構(gòu)的噴槍一起轉(zhuǎn)動(dòng)。
被動(dòng)齒輪A、B的寬度設(shè)計(jì)為10 mm。
4.4 介輪B
如圖6所示,介輪B分度圓直徑為:

式中:d2—介輪B分度圓直徑(mm);
m—齒輪模數(shù),選用1;
Z2—介輪B齒數(shù)。
被動(dòng)齒輪A和被動(dòng)齒輪B的中心距設(shè)計(jì)為130 mm,由此計(jì)算出介輪B的齒數(shù)Z2為40,分度圓直徑d2為40 mm。
介輪B的寬度設(shè)計(jì)為10 mm。
4.5 介輪A
如圖7所示,介輪A分度圓直徑為:

式中:d3—介輪A分度圓直徑(mm);
m—齒輪模數(shù),選用1;
Z3—介輪A齒數(shù)(26);
計(jì)算分度圓直徑為26 mm。
被動(dòng)齒輪介輪A的寬度設(shè)計(jì)為10 mm。
4.6 齒輪強(qiáng)度計(jì)算
根據(jù)扭轉(zhuǎn)強(qiáng)度公式估算軸徑[5]:

式中:d—危險(xiǎn)截面處的軸徑(mm);
P—軸所傳遞的功率(40 W);
A—與材料有關(guān)的系數(shù),選用40Cr,系數(shù)值為4.6;
ω—軸的角速度,25 rpm,即2.62 rad/s計(jì)算得到,d≥11.4 mm。
此次計(jì)算,已經(jīng)將彎矩的影響考慮在內(nèi),由于本次設(shè)計(jì)彎矩很小,故減速機(jī)輸出軸徑10 mm即可滿足強(qiáng)度要求。
被動(dòng)齒輪A、B與噴灑機(jī)構(gòu)一起轉(zhuǎn)動(dòng),傳遞動(dòng)力的最小直徑是內(nèi)孔,內(nèi)孔直徑為34 mm,滿足強(qiáng)度要求。
介輪A、B的固定軸不轉(zhuǎn),即軸承外圈轉(zhuǎn)動(dòng),計(jì)算強(qiáng)度應(yīng)以分度圓直徑為準(zhǔn)。介輪A分度圓直徑為26 mm,介輪B的分度圓直徑為40 mm,滿足強(qiáng)度要求。
5 田間試驗(yàn)
為了驗(yàn)證齒輪傳動(dòng)擺動(dòng)噴灑機(jī)構(gòu)的噴灑效果,2020年10月12日,對(duì)3WP-200型小型智能植保機(jī)器人樣機(jī)進(jìn)行了噴灑初步試驗(yàn)。試驗(yàn)地點(diǎn)是淄博市博山區(qū)源泉鎮(zhèn)天津?yàn)澄鞔瀚J猴桃種植基地。試驗(yàn)地塊平整,獼猴桃樹行間鋪設(shè)了地磚塊,行距為3m,獼猴桃已經(jīng)摘除,只對(duì)獼猴桃樹枝葉進(jìn)行農(nóng)藥噴試驗(yàn)。試驗(yàn)樣機(jī)及試驗(yàn)場(chǎng)地見圖9。
田間試驗(yàn)表明,齒輪傳動(dòng)噴灑擺動(dòng)機(jī)構(gòu)運(yùn)轉(zhuǎn)平穩(wěn),效果良好。

圖9 試驗(yàn)樣機(jī)和試驗(yàn)場(chǎng)地
6 結(jié)語
1)植保機(jī)噴灑擺動(dòng)機(jī)構(gòu)采用齒輪傳動(dòng),取代連桿擺動(dòng)機(jī)構(gòu),齒輪傳動(dòng)連續(xù),電機(jī)負(fù)荷平穩(wěn),擺動(dòng)機(jī)構(gòu)尺寸緊湊,克服了連桿機(jī)構(gòu)存在的死點(diǎn)、急回運(yùn)動(dòng)特征、尺寸大等缺點(diǎn)。
2)田間試驗(yàn)表明,齒輪傳動(dòng)噴灑擺動(dòng)機(jī)構(gòu)運(yùn)轉(zhuǎn)平穩(wěn),提高了農(nóng)藥的噴灑質(zhì)量,降低了農(nóng)藥的噴灑數(shù)量,有利于實(shí)現(xiàn)化肥減量提效,減輕對(duì)土壤及空氣的污染。