提升車載式移動變電站運行安全的5G+水平平衡監測系統的探究
2021-02-09 05:09:18張擁軍陸德志申志成
電子產品世界 2021年5期
張擁軍 陸德志 申志成
摘 要:移動變電站逐漸成為供電可靠性提升的必要設備,其區別于傳統變電站的很多運行特殊性,尤其是車載式移動變電站水平平衡問題是關系到主變等重要設備正常運行的關鍵難點。本文探究了一種基于5G通信技術的水平平衡實時監測系統,實現了實時監測、精準識別、快速響應、遠方報警,大幅提升電力設備運行安全可靠水平。
關鍵詞:車載式移動變電站;5G;水平平衡;在線監測
0 引言
移動變電站是一個結構緊湊、轉運方便、安裝快捷的可移動式小型變電站。電氣設備主要由高壓開關、流變、壓變、隔離閘刀、接地變、主變、站用變、低壓開關柜、交直流系統及二次保護、監控系統等組成,整體搭載在移動式平板車上,應用領域廣泛,可極大提高供電可靠性,縮短關鍵供電用戶的停電時間,有效降低其經濟損失[1]。在電力系統中,變電站的運行安全十分重要。變電站內設備對于地基平衡的要求也非常高,特別是變電站中最重要的設備——主變,其運行環境的水平平衡直接影響主變本體及分解開關配置的氣體繼電器、瓦斯繼電器等設備的動作穩定性。車載式移動變電站設備主要配置于平板車上,依靠平板車配置的多個液壓支撐桿保持設備運行基礎面的水平度,以使電氣設備穩定運行在同一個水平面上。
1 問題分析
1.1 車載式移動變電站結構
移動變電站設備配置圖如圖1、圖2所示。其高壓部分一般采用線變組接線形式,由一回高壓進線連接至雙線圈三相無勵磁降壓變壓器;低壓部分采用單母線接線方式,設備采用金屬鎧裝固定中置式開關柜,有低壓饋線間隔、壓變間隔、所用變間隔以及主變低壓開關間隔。
主變配置有PCS978電量保護,主要包括差動保護、復合電壓閉鎖、過流等。同時,配置有非電量保護,包括本體重瓦斯、本體輕瓦斯、有載重瓦斯和輕瓦斯、本體與有載的壓力釋放等保護。各類保護在車載式移動變電站運行時實現對故障的快速判斷與排除。
1.2 水平度的高要求
配電車上布置有主變保護測控、遠動主機及各出線設備保護測控裝置。這些設備為微機型設備,對運行環境要求較高,一旦發生平衡問題,將對這些設備的運行穩定性帶來風險。
由于主變為油絕緣設備,其非電量保護通過內部油的流速、油內氣體量以及內部油壓來實現實時保護。如果變電車發生失衡或傾斜,則將導致內部油位、油壓、油速的變化,保護存在誤動風險。一旦非電量保護誤動,將跳開主變兩側開關,發生大面積的停電事故。
1.3 解決思路
預防為主,實時監測。研制一種無線的水平平衡監測裝置,實現對車載式移動變電站各設備配置區的相關平衡度的實時監視和快速報警。配置1臺中央控制器,實現對監測裝置的信息匯總以及狀態評價,及時發出本地與遠程報警信號,實現水平度異常的預防。同時,其還可以在車載式移動變調整各液壓支撐結構時提供水平度的校核值,幫助移動變運行維護人員調整車載式移動變設備運行面的水平傾斜度。
2 方案探索
2.1 裝置功能設計
車載式移動變電站設備主要配置于平板車上,依靠平板車配置的多個液壓支撐桿保持設備運行基礎面的水平度。各液壓支撐桿應實現電動調節,與水平平衡監視器構成一體化聯動,從而保證車載式移動變電站設備運行面的水平傾斜度達到運行要求。移動平板車水平度監測裝置由2部分組成:水平傾斜度監視模塊和核心控制模塊。其中監視模塊最多支持6個,可配置于各設備的支撐桿位置處與重要設備運行界面上,實現水平傾斜度的實時監視。核心控制模塊負責接收各監視模塊的監視數據,進行智能判斷并輸出判斷結論。
2.2 裝置面板設計
水平傾斜度監視模塊的控制面板上配置有通信用天線、編程用USB接口、充電用Type-C接口、電源雙位開關和雙位置指示燈,如圖3所示。
核心控制模塊的裝置面板配置情況如圖4所示。除了基于5G通信技術的天線外,還配置有WLAN傳輸天線,從而實現與各水平傾斜度監視模塊的信息交互[2]。 同樣,常規配置還包括編程用USB接口、充電用Type-C接口、電源雙位開關和雙位置指示燈。聲光報警器可實現數據越限的快速報警,高精度顯示屏可實現可視化展現及管理。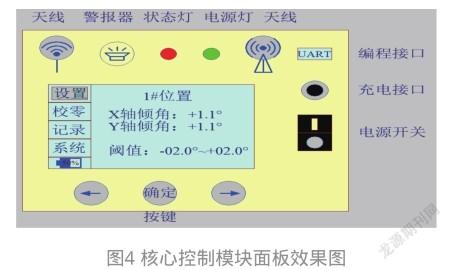
2.3 裝置原理設計
5G+水平平衡監測系統的基本原理如圖5所示。該系統共分為兩大部分,即前面講到的水平傾斜度監視模塊和核心控制模塊。水平傾斜度監視模塊通過角度傳感器實現水平傾斜度數據監測,利用核心控制器(MCU)控制傳感器實現3次/min的角度測量,從而保證水平度的監測時間頻率。之后,MCU將監測數據數字化后通過WLAN網絡傳輸至核心控制模塊。核心控制模塊通過WLAN網絡獲取各水平傾斜度監視模塊的數據,同時進行數據閾值判別,并根據閾值比較結果進行相應動作。若水平傾斜值超出或低于閾值,則由MCU進行聲光高進控制,并同步利用5G網絡發出報警短信及越限水平傾斜度監視模塊的編號、數值等詳細信息,以短信形式通知安全管理員,同時完成錄波。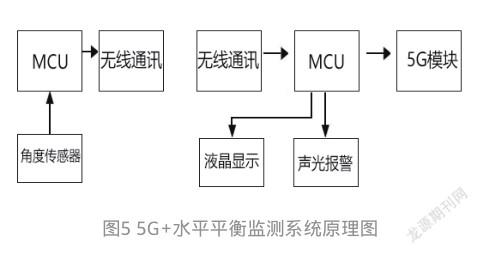
3 角度傳感器研究
3.1 原理設計
基于牛頓第二定律,常用的角度傳感器技術采用傾角測量理論;依據相關物理原理及系統學說,在同一個系統內部,速度V是不可測量與計算的,而速度的變化量卻是可以計算的,即加速度可測。若一個系統的初始速度為已知量,則可利用加速度極性積分計算獲取相關速度以及直線位移情況。角度傳感器的原理即傾斜角測量理論,利用慣性定律計算系統內的加速度[3]。
若傳感器未發生傾斜,即保持靜止時,則意味著傳感器在各個方向上(除重力方向)未獲得加速度。重力加速度垂直軸與角度傳感器靈敏軸之間的夾角可以定義為測量傾斜角,從而實現對傾斜度的測量。通過該傳感器獲得角度數據和信號后進行高精度A/D轉換獲取數字信號,再經過濾波、平滑、方差估計等數據處理方式處理,得到高精度瞬時加速度,從而確定測量傾斜角的準確數值。
水平傾斜度監視模塊中的角度傳感器基于加速度原理,配置為雙靈敏軸傳感器。該雙靈敏軸傳感器主要針對水平面的傾斜和俯仰角度進行精確計算和感知,通常測量范圍為-30°~30°,可以滿足車載式移動變電站設備的運行需求。雙靈敏軸傳感器內部原理功能結構如圖6所示,為了完成數據處理,內部配置了A/D 轉換器、EEPROM存儲器、SPI傳輸接口、信號調理電路等器件。而感測元件一般采用硅電容單元,以提升傳感器運行穩定性。為了進一步提升雙靈敏軸傳感器的穩定性,采用了雙通道配置,分別對兩個靈敏軸情況進行感測,從而完成對水平面的傾斜和俯仰角度的計算。本傳感器采用兩種信號輸出方式,即擬電壓信號輸出和 SPI數字信號輸出。該傳感器還配置了溫度傳感器,實現溫度補償,進一步降低環境溫度對角度傳感器的測量精度的影響。
3.2 電路設計
電路設計如圖8所示。雙靈敏軸傳感器有兩個模擬輸出端,分別接入數模轉換器的輸入通道。同時,該傳感器還具有SPI接口,該接口共配置4根線路,而水平傾斜度監視模塊的輸入輸出接口非常少,為了提升工作效率,滿足實際設備需求,故采用先信號輸入再數模變換的數據采集方式。
4 裝置電路設計
4.1 接口電路設計
接口電路模塊(nRF905)采用雙側18針接口,各接口功能涵蓋各類電源及數據,實現與核心控制器數據交互,其結構如圖9所示。
4.2 核心控制器設計
核心控制端是基于STM32F103RBT6芯片而開發的。該芯片是32位內核,性能優良、成本低廉、性價比高、功耗小、兼容性強,是最佳的MCU選擇。其外設電路設計如圖10所示。
5 結束語
針對移動變電站運行特殊要求開發的提升車載式移動變電站運行安全的5G+水平平衡監測系統,基于雙靈敏軸傳感器實現對車載移動變電站水平平衡度的實時監測;基于5G通信技術實現監測數據以及報警信號的實時傳輸,提升了車載式移動變電站運行的安全性、可靠性和穩定性。
該裝置及對應方法可以應用于車載式移動變電站,檢測靈敏,報警及時可靠,方便使用,通用性強,能夠對移動變電站平板車水平度進行有效監測,消除因為平板車水平度異常而引起的安全隱患,保證設備和人身安全。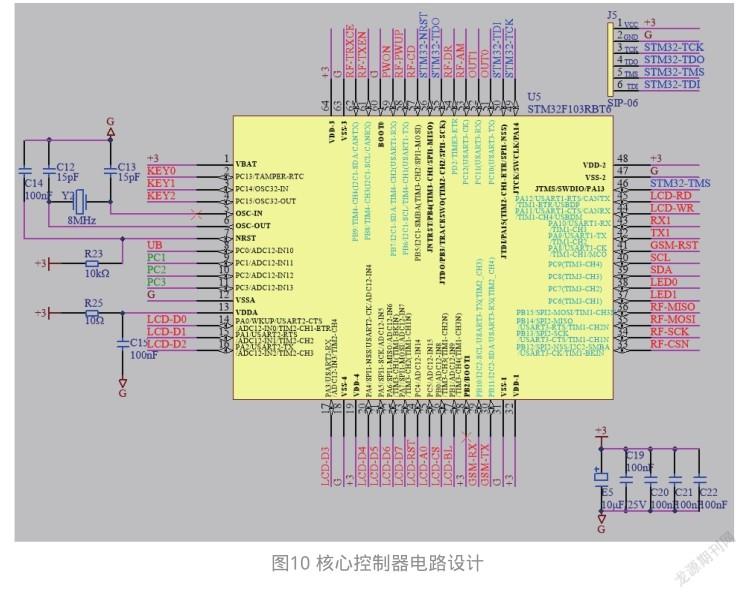
參考文獻:
[1] 陳云瑤,胡夢泉,劉洪春.車載式移動變電站在高海拔地區應用的消防技術分析[J].電力設備管理,2020 (10):51-53.
[2] 段垿,葉偉清.基于5G移動網絡的智能變電站自動化應用分析[J].電氣開關,2020(02):90-92+96.
[3] 蔡晶,冉旺,韓丹,等.大功率車載式移動變電站設計應用系統研究[J].廣東電力,2020(01):86-92.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
人大建設(2019年12期)2019-05-21 02:55:32
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
河南電力(2015年5期)2015-06-08 06:01:45
消費者報道(2014年7期)2014-07-31 11:23:57