一種結合車聯網和C-V2X的終端設備系統架構設計
2021-02-10 06:24:44劉曉東
電子產品世界 2021年6期
關鍵詞:信息
劉曉東
摘 要:本文介紹的網聯終端設備結合了蜂窩網移動通信終端和C-V2X PC5直連通信終端,兩者通過以太網進行信息交互,均由車載電池供電并連接到車輛總線,根據車輛總線消息進入不同的工作模式;移動通信終端可為車輛提供遠控、防盜、OTA、數據路由等多種服務;C-V2X通信終端可與其他車輛、基礎設施等進行交互,然后基于交互消息和自身狀態進行判斷并向駕駛員提供預警信息。
關鍵詞:T-Box;V-Box;C-V2X;Telematics;TCSAE-53;網聯;智能交通系統
車聯網是汽車電子、移動通信、交通系統高度融合的新產業,是汽車行業最重要的技術創新和產業方向。
目前車聯網已逐漸開始普及,為實現網聯功能安裝T-box的新車在不斷增加。新車上安裝的T-box配合覆蓋率非常高的移動通信網絡可為車主、車廠和4S店等提供多種網聯服務,例如可為車主提供車輛遠程控制、防盜、車載ECU軟件的OTA升級等服務,可為車載其它設備提供數據路由,具有緊急狀態下的自動或手動呼叫等功能;車廠和4S店可獲得車輛狀態及故障等信息,向車主推送維修、保養等提醒信息[1]。
0 引言
C-V2X(Cellular-Vehicle to Everything)是一種車用無線通信技術,是將車輛與一切事物相連接的新一代信息通信技術,其中V代表車輛,X代表任何與車交互信息的對象,目前X主要包含車V、人P、路側基礎設施I(例如路側單元RSU)和移動通信網絡N。以C-V2X為代表的智能交通系統可非常有效地降低交通事故,提高交通效率。目前C-V2X設備(簡稱V-Box)已有新車開始裝配,其可與其他車輛、RSU等通過PC5直連通信實現信息交互,并通過T-box與移動通信網絡進行交互,獲取更多更遠的交通信息,這樣本車可通過這些信息判斷其他車輛的狀態、路況或行人的意圖等,從而做出預判并提醒駕駛員及時對車輛采取措施,以避免交通事故的發生,或者使車輛以最佳速度通過交通燈路口,減少車輛等待時間和道路擁堵幾率,提高道路通行效率等。
我國目前在大力推動汽車的網聯化、智能化和電動化,可以預見,隨著技術的發展、基礎設施的完善、相關法規的實施,車聯網和以C-V2X為核心的智能交通系統將逐漸普及,給車主帶來更加快捷、舒適、安全的駕駛體驗。
1 系統設計
系統結構如圖1所示。
2 系統特點
本文介紹了一種T-box加V-Box的方案,該方案是把T-box和V-Box分為兩個單獨的模塊,兩者之間、兩者和車上其他ECU之間通過以太網進行信息交互,既可實現與移動通信網絡的網聯功能,也可實現C-V2X的PC5直連通信;這樣既可實現車聯網的功能,又可實現C-V2X功能(如V2V、V2I、V2N)。
該架構可在已具有T-box的車型上增加V-Box進行升級增配,根據不同的車型等級提供不同的功能配置。
3 各模塊的功能及作用
3.1 在上述架構圖中,T - box主要用于和移動通信網絡通信
1)網聯模塊通過以太網將與移動通信網絡通信的上下行數據與V-Box或車內其他設備(如信息娛樂系統)進行交互。網聯模塊配備主輔兩個外置天線,主天線具有收發功能,輔天線具有接收功能。為了在天線出現故障時能及時發現并通知車主,T-box需具備天線開、短路診斷功能;網聯模塊和微處理器MCU通過UART等進行狀態交互。在待機模式下,為了可遠程快速喚醒T-box,網絡模塊處于DRX模式,當待機超過一定時間(如14天),為減少對車輛電池的消耗,網聯模塊的電源將被切斷進入掉電狀態。
2)MCU通過總線收發器收發車輛總線消息并進行解碼,根據車輛發送的總線消息(如車輛點火、熄火等),對T-box整機進行開機、待機等控制,并對各模塊電源進行管理,實現關鍵模塊的正確上電時序以及整機在待機模式下的低功耗要求。MCU同時還對自身和其他模塊進行監控,避免整機進入死循環等狀態,如網聯模塊發送定時信號給MCU,如果MCU超時未收到此信號,則認為網聯模塊出現意外并強制對其進行復位。
3)總線收發器為CAN收發器,可根據整車總線網絡選擇高速CAN或CAN FD。使用CAN FD可在T-box待機狀態下根據總線報文確定是否喚醒T-box,從而降低功耗。
4)電源模塊的設計在兼顧成本的前提下要考慮幾個因素:整機和各模塊峰值電流的要求,待機模式下低功耗的要求,關鍵模塊的供電診斷,車廠或國標的電源測試標準要求(如ISO7637、傳導輻射測試、傳導抗擾測試等)。
3.2 V- Box用于PC5直連通信(如和其他車輛、RSU的通信)
1)C-V2X直連通信模塊主要用于和其他對象直接交互信息,并根據接收到的消息和本車的狀態信息做出預警等判斷;具備兩個V2X天線。
2)MCU除了接收解碼CAN消息用于V-box整機的開關機控制和各模塊的電源管理,還將與車輛狀態相關的CAN消息(如車輛速度、左右轉彎、剎車、雙閃燈狀態等)解碼后發送給C-V2X直連通信模塊,該模塊再將這些消息發送給周圍車輛;MCU同時還對自身和其他模塊如直連通信模塊、應用處理器進行監控,以避免出現死循環等問題。
3)由于V-Box要處理的C-V2X消息數據量大,如按周圍300 m范圍內有200輛車、每輛車交互10條消息/秒計算,V-Box每秒需要處理2 000條消息,對處理器的算力要求高,因此需要外加應用處理器專門用于C-V2X消息的處理。
4)由于C-V2X對定位精度和時間精度要求高,除了有通信模塊內置的模塊用于GNSS數據接收、定位和授時外,還需要外加慣性測量單元IMU(陀螺儀+加速度計)和專門的算法用于特殊場景的定位和授時,例如隧道、高樓林立的市區等。
5)硬件安全模塊HSM主要用于C-V2X消息的簽名、驗簽、證書驗證以及秘鑰存儲等,需要支持相應的國密算法。
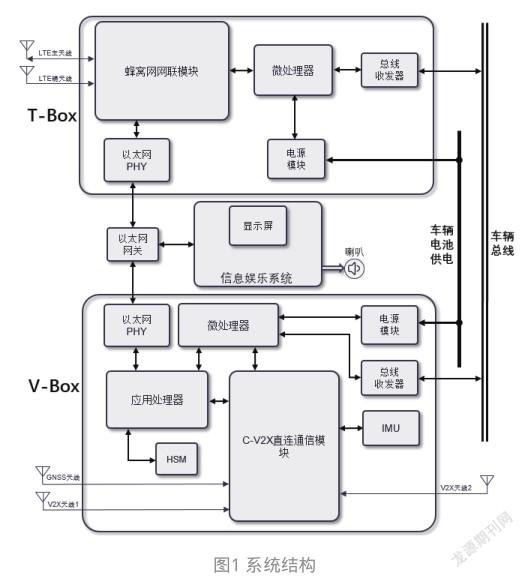
6)以太網除了和T-box交互移動通信網絡信息,還將通過以太網網關將V-Box產生的前向碰撞預警、車輛失控等預警信息轉發給其他系統,為駕駛員提供及時的圖文、語音預警。如果車輛配備駕駛輔助系統,V-Box還可作為傳感器,該系統在綜合V-Box、雷達、攝像頭、超聲波等的輸入后進行運算決策,然后對車輛進行相應控制(如剎車、減速等)。
4 實際應用
本系統所介紹的方案已應用在實際產品中,可實現TCSAE-53-2017標準中的安全和效率類場景,例如V2I場景的道路危險狀況提示、闖紅燈預警和綠波車速引導、弱勢交通參與者碰撞預警等;V2V場景的前向碰撞預警、盲區提醒和故障車輛預警等,取得了良好的應用效果。
參考文獻:
[1] 中國汽車工程學會.TCSAE-53-2017合作式智能運輸系統車用通信系統應用層及應用數據交互標準[S].
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32