基于OP_YOLOv3 Tiny算法的電路實驗器材檢測
2021-02-11 05:58:54梁銘炬
中國新技術新產品 2021年22期
梁銘炬
(廣東順德工業設計研究院(廣東順德創新設計研究院),廣東 佛山 528300)
0 引言
在現存的初中物理電路實驗教學中,由于存在單個老師無法同時對多個學生的實驗操作進行評分的問題,因此需要開發基于嵌入式設備的智能電路實驗評分系統,利用該系統對人工智能進行評分,基于目標檢測算法的電路元器件檢測是該系統的的關鍵之一。
目前,應用較為廣泛的基于深度學習的目標檢測算法可分為2 類:1) 基于候選區域的目標檢測算法。具有代表性的算法有R-CNN、Fast R-CNN 和Faster R-CNN 等[1]。2) 基于回歸的目標檢測。具有代表性的算法有SSD、YOLOv2 和YOLOv3 等[2]。與第一類算法相比,它們具有檢測速度高、檢測精準率低的特點。
針對嵌入式設備存在計算能力不足的問題,該文以YOLOv3-Tiny 算法為基礎提出了OP_YOLOv3 Tiny 算法。首先,采用5 層MAX Pooling 對特征矩陣進行OP 降維操作,削弱池化的特征弱化現象。其次,優化調整圖像尺寸,豐富小目標的淺、深層語義信息,提高檢測小目標的精準率;同時,在訓練算法模型前,使用K-means聚類算法獲得訓練集最佳Anchor box 參數。最后,在采集到的電路實驗器材數據集上進行訓練和測試。
1 相關工作
1.1 YOLOv3-Tiny 算法
在網絡結構上,YOLOv3-Tiny 算法使用卷積層、批歸一化層及激活函數層融合的結構提取輸入圖像的特征,并采用非重疊最大池化操作對特征矩陣進行降采樣,同時,使用2 個不同尺度的特征圖(feature map)進行目標預測。YOLOv3-Tiny 算法的模型結構如圖1 所示。

圖1 YOLOv3_Tiny 算法網絡結構圖
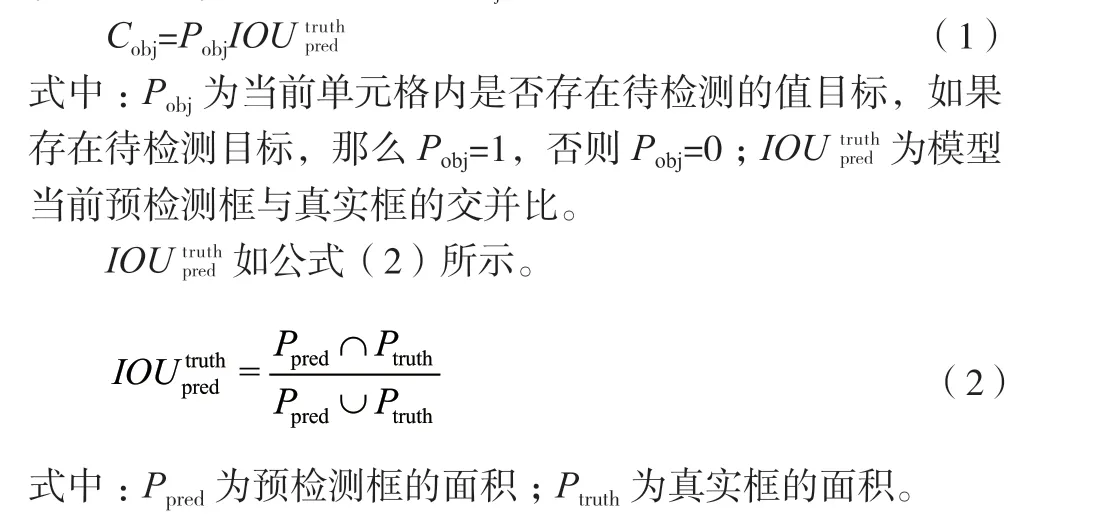
YOLOv3-Tiny 算法可以接受任意尺寸的圖像數據,輸入數據在送入卷積神經網絡之前被調整為固定尺寸。輸入圖像經過卷積神經網絡后被劃分為S×S個網格,每個網格單元分別預測3 個錨框,每個錨框都有5 個基本參數:(x、y、w、h和confidence),分別代表檢測框的中心點坐標(x,y)、寬高(w,h)和置信度評分(confidence),置信度評分Cobj如式(1)所示。
1.2 MAX Pooling 層
YOLOv3-Tiny 算法采用最大池化模型對輸入特征圖進行非重疊池化降維。最大池化模型則是取池化區域中的最大值作為該區域池化降采樣后的特征值。假設某最大池化層池化域為C×C、步長為C且偏置為B,輸入特征圖矩陣F通過該層非重疊池化操作后得到的降采樣特征圖為S,那么最大池化層如公式(3)所示。
2 算法優化
2.1 優化YOLOv3-Tiny 算法
在實際檢測物理電路實驗器材的過程中,為了最大程度地減小檢測攝像頭對學生操作的影響,需要使攝像頭與實驗臺保持一定的距離(通常大約為1 m)。這個距離會導致一些尺寸較小的實驗器材(例如小燈泡、單刀開關等)在YOLOv3-Tiny 算法的13×13、26×26 尺寸的feature map 下并不能取得令人滿意的檢測效果[4]。該文在YOLOv3-Tiny 算法的基礎上提出OP_YOLOv3 Tiny 算法,其特征提取主干網絡結構如圖2 所示。

圖2 優化YOLOv3-Tiny 算法特征提取主干網絡
首先,在YOLOv3-Tiny 算法特征提取主干網絡的前五層MAX Pooling 層中引入重疊池化降維操作,選取重疊池化域中的最大值作為該區域降維后的特征值。假設MAX Pooling層輸入特征圖大小為M×M,經過重疊池化操作后輸出特征圖大小為N×N,池化域尺寸為K、步長為S,則其滿足公式(4)。該文在試驗過程中認真權衡算法模型的檢測精準率和計算復雜度,最終選取池化域尺寸K為3、步長S為2 的MAX Pooling 層對特征矩陣進行降維。其次,刪除YOLOv3-Tiny 算法中第六層池化域尺寸K為1、步長S為1 的MAX Pooling 層,減少模型訓練測試過程中的冗余計算量;同時,重新定義網絡結構的初始輸入圖像尺寸,以639×639×3 的像素作為初始輸入圖像的大小,經過5 層融合的歸一化及激活函數層結構提取特征以及4 層池化域尺寸K為3、步長S為2 的MAX Pooling 層降采樣后,得到尺寸為39×39×256的淺層語義信息輸出特征矩陣;再經過3 層DBL 結構及1層池化域尺寸K為3、步長S為2 的MAX Pooling 層再次提取該輸出特征矩陣的特征并進行及降采樣,得到尺寸為19×19×256 的深層語義信息輸出特征矩陣。最后,通過特征融合的方式進行目標檢測。

2.2 錨框(Anchor)聚類
針對初中物理電路實驗器材數據集的特點,該文采用K-means 聚類算法對訓練集邊界框進行聚類分析,從而得到錨框[5]。但是在實際的聚類分析中,分析誤差會隨著邊界框尺寸的變大而變大。為解決這一問題并保證聚類分析誤差與邊界框尺寸無關,該文重新定義了K-means 聚類算法中的距離公式,如公式(5)所示。

該文采用重新定義距離公式的K-means 聚類算法對采集到的電路實驗器材訓練集邊界框進行聚類分析。在聚類過程中,將聚類中心的數值設置為K=6,得到得新的Anchor box參數分別為(37,63)、(69,74)、(51,125)、(131,87)、(87,161)以及(157,254)。
3 試驗
3.1 試驗數據集制作與標注
訓練數據集制作是基于深度學習的目標檢測算法的基礎。該文使用的初中物理電路實驗器材數據集來源分為2 個部分:自行拍攝采集和互聯網數據搜集。其中,自行拍攝采集為該文使用數據集的主要來源,互聯網數據搜集為次要來源。
為了使采集到的數據集具有較高的質量且可以訓練出具有較強的多場景、復雜場景檢測能力的模型,在數據采集過程中,需要不斷改變拍攝角度、背景以及光照等外界因素,從而初步增強數據集的魯棒性。在數據集采集完畢之后,對數據集進行質量篩選,剔除存在模糊、失真以及特征不明顯等問題的樣本,同時兼顧不同角度、不同背景以及不同光照下的樣本數量,使樣本數量在整體上達到均衡。經過篩選的數據集的類別名稱及數量見表1。

表1 數據集類別及數量
該文使用MRLabeler 標注軟件并參照Pascal VOC 和COCO 數據集的圖像標注格式對獲得的數據集進行標注,生成訓練所需要的xml 格式文件。
3.2 試驗平臺及網絡訓練
該文使用Python 語言在Darknet 深度學習框架下進行實驗。PC 端搭載了i7-9700k 處理器、GTX 2080Ti 11G 顯卡、64 GB 運行內存以及Ubuntu18.04 操作系統。
在訓練模型的過程中,根據訓練過程中的損失(loss)值和IOU值對網絡參數進行微調。部分超參數設置見表2。

表2 部分超參數值
3.3 評價標準
該文從以下2 個方面評測OP_YOLOv3 Tiny 算法的網絡模型性能。
精確率(AP)。精確度如公式(7)所示。

式中:Tp為真正標簽;Fp為假正標簽。
每秒處理幀數(fps)。在PC 端上通過USB 接口掛載嵌入式開發板RK3399Pro,模擬開發板的硬件性能,并通過終端打印OP_YOLOv3 Tiny 算法模型的每秒處理幀數。
3.4 實驗結果分析
該文使用SSD300、SSD512[6]、YOLOv3、YOLOv3-Tiny和OP_YOLOv3 Tiny 算法在相同的條件下對采集到的電路實驗器材數據集進行訓練與測試,并通過在PC 端掛載嵌入式開發板RK3399Pro,模擬開發板硬件性能,得到AP、fps等技術指標(見表3)。由表3 可知,該文提出的OP_YOLOv3 Tiny 算法在實驗器材數據集上的檢測精準率達到88.1%,在嵌入式RK3399Pro 開發板上的檢測幀率達到33.8 f/s,完全可以達到實時檢測的效果。
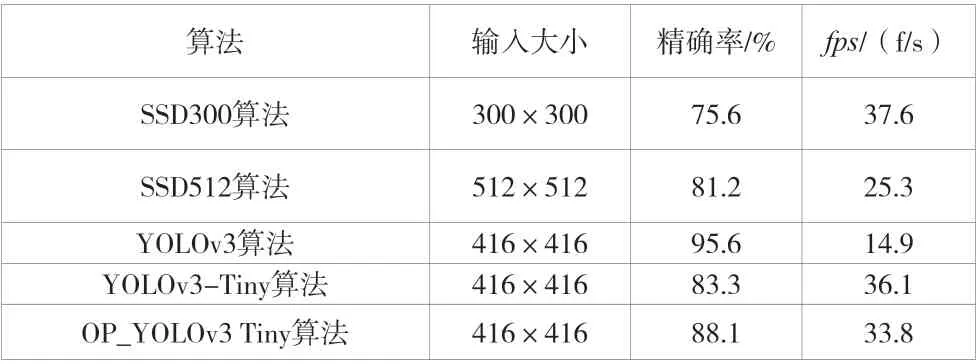
表3 不同算法的技術指標
SSD300 與SSD512 均為基于回歸及特征金字塔的目標檢測算法,該系列算法使用與Anchor box 機制相似的預選框(Prior box)。從表3 中可以看出,SSD300 算法在電路實驗器材數據集上的檢測精準率達到75.6%,在嵌入式RK3399Pro開發板上的檢測幀率達到37.6 f/s。SSD512 算法在SSD300 的基礎上改變了算法網絡結構輸入圖像尺寸的大小,在顯著提高檢測精確率的同時大幅增加了模型的計算量,其檢測精準率與SSD300 算法相比提高了5.6%,檢測幀率下降了12.3 f/s。綜上所述,SSD300 算法在檢測幀率上可以達到實時檢測的效果,但其檢測精確率較低;SSD512算法的檢測精準率有所提升,檢測幀率僅出現小幅度下降,但這2 種算法與該文提出的OP_YOLOv3 Tiny 算法相比都沒有優勢。
YOLOv3 算法與YOLOv3-Tiny 不同,其采用結構更為復雜的darknet-53 特征提取主干網絡提取輸入圖像的特征,并在前向傳播的過程中,放棄使用MAX Pooling 層,通過改變卷積核的步長來改變特征矩陣的尺寸,同時在輸出方面采用3 種尺度的feature map 進行目標預測,因此該算法在電路實驗器材數據集上的檢測精準率達到了95.6%,但由于其權重模型計算復雜度過高,導致該算法在嵌入式RK3399Pro 開發板上的檢測幀率僅有14.9 f/s,無法達到實時檢測的效果。
該文提出的OP_YOLOv3 Tiny 算法在嵌入式RK3399Pro 開發板上檢測幀率達到33.8 f/s,比YOLOv3-Tiny 算法低2.3 f/s,其檢測精準率比YOLOv3-Tiny 算法高4.7%,可以滿足實時檢測的要求。因此,在實際的應用中,該文提出的OP_YOLOv3 Tiny 算法更具優勢。
4 結語
該文以YOLOv3-Tiny 算法為基礎提出OP_YOLOv3 Tiny算法。首先,在算法特征提取主干網絡中采用5 層MAX Pooling 對特征矩陣進行重疊池化降維,削弱池化的特征弱化現象。其次,優化調整算法輸入圖像的尺寸,豐富小目標的淺層語義信息、深層語義信息,提高算法檢測小目標的精準率。最后,使用K-means 聚類算法聚類獲得契合電路實驗器材數據集最佳Anchor 的個數與大小,改進算法參數。在該文采集的電路實驗器材數據集上測試得出,OP_YOLOv3 Tiny 算法的檢測精準率(AP)達到88.1%,在嵌入式開發板RK3399Pro 上的檢測幀率(fps)高達33.8 f/s,滿足實時檢測的要求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55