
基于某種裝卸機械的三支點全向驅動系統(tǒng)設計
2021-02-14 11:38:09謝義朋李志鵬傅金根
科技信息·學術版 2021年6期
關鍵詞:設計
謝義朋?李志鵬?傅金根
摘要:對一種基于某種裝卸機械的三點布置的全向驅動系統(tǒng)進行原理設計、技術指標計算,分析了采用三點布置的優(yōu)點以及必要性,三支點全向驅動系統(tǒng)具有移動靈活、操作方便、行走所需空間小、結構緊湊等特點。同時通過關鍵技術指標的計算為關鍵部件的選型提供了理論依據(jù)。
關鍵詞:三點布置;驅動;全向;設計
隨著我國經(jīng)濟社會的快速發(fā)展,現(xiàn)代化倉儲技術和智能設備也迎來了高速發(fā)展,各類自動化設備幾乎遍及了現(xiàn)代倉庫的各個角落,近年來,更是有各類貨物裝卸設備逐步出現(xiàn)在倉庫月臺之上,此類設備通常作業(yè)的區(qū)域為狹小運載工具內部以及擁擠的月臺空間,由此此類設備靈活性越來越重要,配備能夠靈活運動,結構緊湊的萬向行走驅動系統(tǒng)已經(jīng)成為了此類裝卸設備發(fā)展的必然選擇。
1 國內全向驅動系統(tǒng)技術
目前,為滿足設備的全向移動,國內貨物裝卸設備主要采用的是四輪布置的全向驅動系統(tǒng),行走輪采用四個45°麥克納姆輪,平行鏡像布置,或者是四個90°全向輪十字布置。45°麥克納姆輪是一種可以實現(xiàn)全方位運動的萬向輪,主要由輪轂以及圍繞在周邊的輥子組成,輪轂軸心與輥子軸心通常呈45°夾角。全向輪由一個輪盤和固定在輪盤外周圍的輥子組成,輪盤軸心同輥子軸心垂直。四輪驅動的方式通常對于四輪的平面性要求較高,需要懸掛安裝,而采用懸掛通常又會帶來底盤剛度不足、耗費電機資源、占用空間增大、結構復雜等問題。
2 主要結構
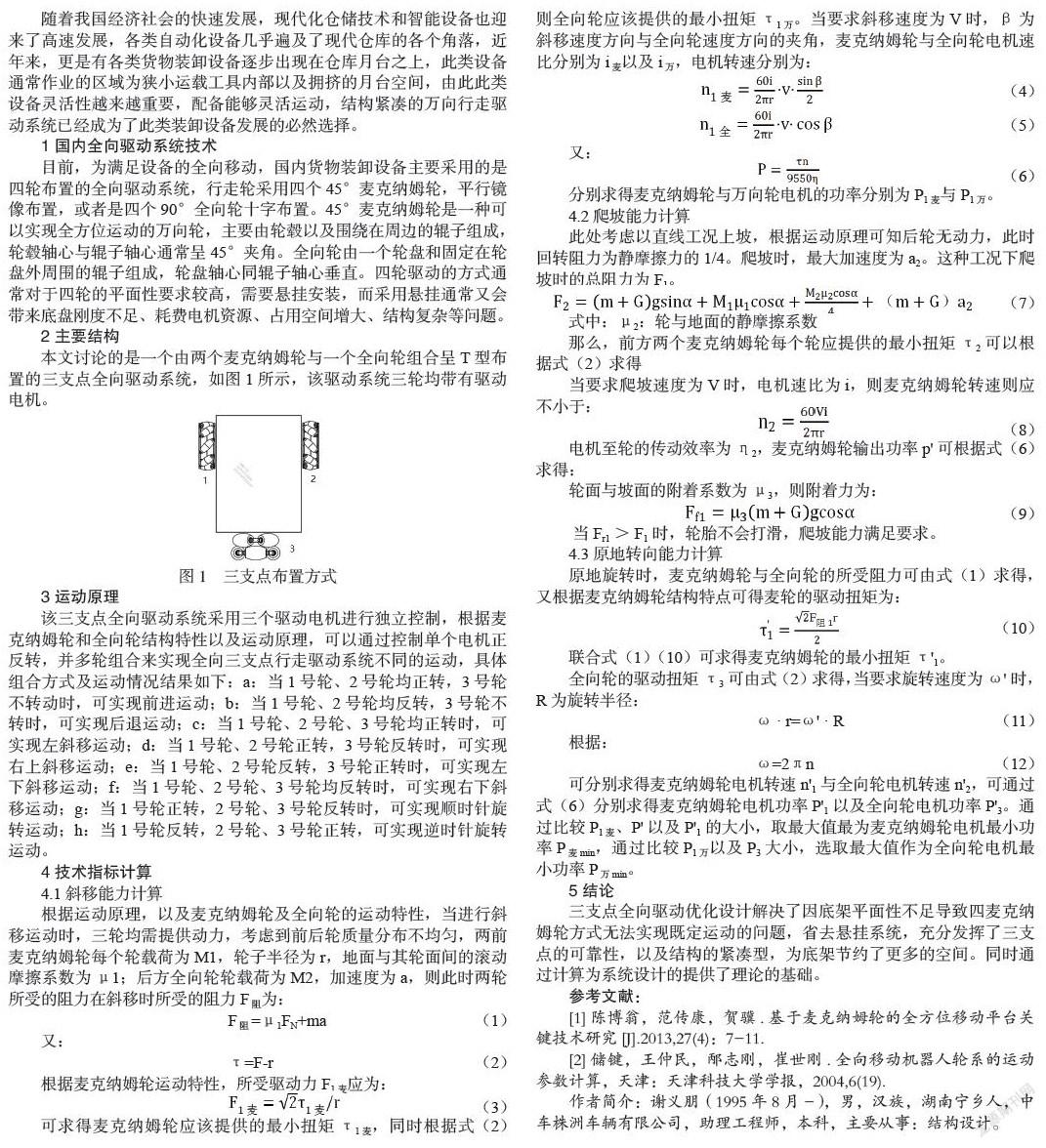
本文討論的是一個由兩個麥克納姆輪與一個全向輪組合呈T型布置的三支點全向驅動系統(tǒng),如圖1所示,該驅動系統(tǒng)三輪均帶有驅動電機。
3 運動原理
該三支點全向驅動系統(tǒng)采用三個驅動電機進行獨立控制,根據(jù)麥克納姆輪和全向輪結構特性以及運動原理,可以通過控制單個電機正反轉,并多輪組合來實現(xiàn)全向三支點行走驅動系統(tǒng)不同的運動,具體組合方式及運動情況結果如下:a:當1號輪、2號輪均正轉,3號輪不轉動時,可實現(xiàn)前進運動;b:當1號輪、2號輪均反轉,3號輪不轉時,可實現(xiàn)后退運動;c:當1號輪、2號輪、3號輪均正轉時,可實現(xiàn)左斜移運動;d:當1號輪、2號輪正轉,3號輪反轉時,可實現(xiàn)右上斜移運動;e:當1號輪、2號輪反轉,3號輪正轉時,可實現(xiàn)左下斜移運動;f:當1號輪、2號輪、3號輪均反轉時,可實現(xiàn)右下斜移運動;g:當1號輪正轉,2號輪、3號輪反轉時,可實現(xiàn)順時針旋轉運動;h:當1號輪反轉,2號輪、3號輪正轉,可實現(xiàn)逆時針旋轉運動。
4 技術指標計算
4.1斜移能力計算
根據(jù)運動原理,以及麥克納姆輪及全向輪的運動特性,當進行斜移運動時,三輪均需提供動力,考慮到前后輪質量分布不均勻,兩前麥克納姆輪每個輪載荷為M1,輪子半徑為r,地面與其輪面間的滾動摩擦系數(shù)為μ1;后方全向輪輪載荷為M2,加速度為a,則此時兩輪所受的阻力在斜移時所受的阻力F阻為:
F阻=μ1FN+ma(1)
又:
τ=F-r(2)
根據(jù)麥克納姆輪運動特性,所受驅動力F1麥應為:
(3)
可求得麥克納姆輪應該提供的最小扭矩τ1麥,同時根據(jù)式(2)則全向輪應該提供的最小扭矩τ1萬。當要求斜移速度為V時,β為斜移速度方向與全向輪速度方向的夾角,麥克納姆輪與全向輪電機速比分別為i麥以及i萬,電機轉速分別為:
(4)
(5)
又:
(6)
分別求得麥克納姆輪與萬向輪電機的功率分別為P1麥與P1萬。
4.2 爬坡能力計算
此處考慮以直線工況上坡,根據(jù)運動原理可知后輪無動力,此時回轉阻力為靜摩擦力的1/4。爬坡時,最大加速度為a2。這種工況下爬坡時的總阻力為F1。
(7)
式中:μ2:輪與地面的靜摩擦系數(shù)
那么,前方兩個麥克納姆輪每個輪應提供的最小扭矩τ2可以根據(jù)式(2)求得
當要求爬坡速度為V時,電機速比為i,則麥克納姆輪轉速則應不小于:
(8)
電機至輪的傳動效率為η2,麥克納姆輪輸出功率p'可根據(jù)式(6)求得:
輪面與坡面的附著系數(shù)為μ3,則附著力為:
(9)
當Fr1>F1時,輪胎不會打滑,爬坡能力滿足要求。
4.3 原地轉向能力計算
原地旋轉時,麥克納姆輪與全向輪的所受阻力可由式(1)求得,又根據(jù)麥克納姆輪結構特點可得麥輪的驅動扭矩為:
(10)
聯(lián)合式(1)(10)可求得麥克納姆輪的最小扭矩τ'1。
全向輪的驅動扭矩τ3可由式(2)求得,當要求旋轉速度為ω'時,R為旋轉半徑:
ω·r=ω'·R(11)
根據(jù):
ω=2πn(12)
可分別求得麥克納姆輪電機轉速n'1與全向輪電機轉速n'2,可通過式(6)分別求得麥克納姆輪電機功率P'1以及全向輪電機功率P'3。通過比較P1麥、P'以及P'1的大小,取最大值最為麥克納姆輪電機最小功率P麥min,通過比較P1萬以及P3大小,選取最大值作為全向輪電機最小功率P萬min。
5 結論
三支點全向驅動優(yōu)化設計解決了因底架平面性不足導致四麥克納姆輪方式無法實現(xiàn)既定運動的問題,省去懸掛系統(tǒng),充分發(fā)揮了三支點的可靠性,以及結構的緊湊型,為底架節(jié)約了更多的空間。同時通過計算為系統(tǒng)設計的提供了理論的基礎。
參考文獻:
[1]陳博翁,范傳康,賀驥.基于麥克納姆輪的全方位移動平臺關鍵技術研究[J].2013,27(4):7-11.
[2]儲鍵,王仲民,邴志剛,崔世剛.全向移動機器人輪系的運動參數(shù)計算,天津:天津科技大學學報,2004,6(19).
作者簡介:謝義朋(1995年8月-),男,漢族,湖南寧鄉(xiāng)人,中車株洲車輛有限公司,助理工程師,本科,主要從事:結構設計。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
