基于無人機遙感的伐區(qū)造林坑穴數量與參數提取
2021-02-14 01:56:02周小成王鋒克黃洪宇馮芝清肖祥希
農業(yè)機械學報 2021年12期
周小成 王鋒克 黃洪宇 馮芝清 肖祥希 李 媛
(1.福州大學空間數據挖掘與信息共享教育部重點實驗室, 福州 350108;2.福建金森林業(yè)股份有限公司, 三明 353300; 3.福建省林業(yè)科學研究院, 福州 350012)
0 引言
造林挖穴是植樹造林的第一步,也是造林過程中極其重要的一環(huán),坑穴的數量和質量關乎植樹造林的成活率,影響最終的造林成果質量。當前對造林坑穴的參數提取和質量評價主要依賴工作人員現場抽檢,一方面工作量大、效率低,另一方面客觀準確性難以得到保證。無人機遙感技術應用于植被信息提取和林業(yè)資源調查方面已經進行了大量研究,各種方法被廣泛應用于植被高度、植被覆蓋度、造林規(guī)劃設計、林分參數提取等方面[1-6]。隨著圖像處理技術的發(fā)展,基于無人機影像的人工智能和模板匹配技術在目標探測[7-8]和圖像自動解譯[9-11]等方面得到廣泛應用。已有文獻證明無人機遙感在各類目標探測和識別方面具有較好的實用價值[12-15]。造林坑穴目標具有特定的形狀、光譜和空間分布特征,相互之間具有較大的相似度。模板匹配技術被廣泛應用于相似光譜特征目標提取方面。文獻[16]利用基于模板的特征和基于目標的多光譜圖像特征構建出蟻穴自動檢測的分類器。文獻[17]采用面向對象的模板匹配法和支持向量機法對草地鼠洞進行自動識別,總體精度較高。霍夫變換在提取特定形狀目標方面有較多應用。文獻[9]基于無人機遙感影像和數字表面模型(Digital surface model,DSM)數據綜合運用圓形霍夫變換的方法實現柑橘樹自動化提取。文獻[18]基于圓形霍夫變換提取圖像中圓形對象的方法提取高分辨率遙感影像中的圓形建筑物。
本文采用大疆精靈4 Pro型無人機,實地航拍獲取0.01 m空間分辨率的可見光影像數據,進行伐區(qū)造林坑穴的數量和寬深參數提取研究,以期為造林坑穴質量評價提供自動化的解決方案。
1 研究區(qū)和數據獲取
研究區(qū)位于福建省將樂縣某伐區(qū)(26°51′13″N,117°34′50″E),該林場位于福建省西北部,地處武夷山脈東南部、金溪河畔,多為中、低山地貌,以低山丘陵為主,平均海拔400~800 m,最高海拔為1 403 m,最低海拔為140 m。研究區(qū)整體坡度約為25°,面積約3 712 m2,該研究區(qū)的具體位置如圖1所示。
使用大疆精靈4 Pro型無人機進行遙感影像數據采集,該型無人機搭載1英寸2 000萬像素CMOS攝像頭,等效35 mm焦距,攜帶方便,在復雜環(huán)境下也可快速執(zhí)行影像采集任務。因測區(qū)地形起伏大且無人機不具備仿地形飛行能力,結合實際將測區(qū)劃分為兩部分分別設計航線來獲取數據,其目的是防止地面分辨率變化過大影響圖像拼接效果。航線設計為航向重疊率90%,旁向重疊率70%,飛行相對高度約為36 m,空間分辨率為0.01 m。為了保證成果的平面精度和高程精度以及將成果統(tǒng)一至CGCS2000(China geodetic coordinate system 2000)坐標系下,現場采用華測i70型GNSS接收機獲取11個高精度地面控制點(Ground control point,GCP),實時差分(Real-time kinematic,RTK)模式下的平面精度為±(8 mm+1×10-6D),高程精度為±(15 mm+1×10-6D),其中D表示移動站RTK與基準站間距離。
使用主流無人機攝影測量處理軟件Pix4D進行數據預處理,得到研究區(qū)正射影像(Digital orthophoto map, DOM)、數字表面模型(DSM)及無人機攝影測量點云產品。對使用GCP和不使用GCP生產的DSM分別進行精度驗證,得到的標準誤差(Root mean square error, RMSE)分別為0.056 m與0.158 m。根據林業(yè)生產要求,標準坑穴深度0.400 m,誤差小于15%,使用GCP生產的DSM滿足使用精度要求。
2 研究方法
根據無人機可見光影像進行造林坑穴參數提取,整體思路為:基于無人機可見光影像生產的DOM、DSM和影像點云數據,采用目視解譯、模板匹配和圓形霍夫變換方法對造林坑穴的數量、寬度和深度參數進行提取,整體流程如圖2所示。
2.1 目視解譯法提取坑穴數量
目視解譯主要基于人工判讀,在DOM上借助坑穴的影子信息容易人工辨別坑穴與非坑穴對象,在坑穴上量取南北和東西兩方向長度并計算均值獲取寬度信息,在無人機影像點云上手工量取深度信息。根據人工解譯結果,最終在研究區(qū)得到坑穴總計1 021個。
2.2 基于DOM模板匹配法提取坑穴數量
模板匹配是在目標檢測領域最早被提出以及相對來說較為簡單的檢測方法,它的原理是依據相關策略,根據已知模塊在搜索圖像中尋找逼近模塊的匹配過程[19]。造林坑穴有標準尺寸,相互之間存在很大的相似度,因此選擇模板匹配技術作為坑穴數量檢測方法之一。
2.2.1模板創(chuàng)建與測試
基于DOM創(chuàng)建初始模板時應選擇具有代表性以及不同光照條件下的坑穴。標準坑穴穴面寬為0.5 m,因此設置固定窗口為50個像素的正方形來選取樣本。分別計算所有樣本在紅、綠、藍波段的平均值生成初始模板,并統(tǒng)計各樣本和初始模板之間的平均相關系數,樣本生成模板示意圖如圖3所示。實驗得紅、綠、藍3個波段平均相關系數分別為0.75、0.73、0.70,相關系數越大說明該波段越適合坑穴的目標提取。因此本文選擇紅光波段數據作為源數據進行坑穴提取。
初始模板生成后應用于隨機選擇的某區(qū)域,正確識別率未達到80%以上則手動糾正并將正確識別的坑穴加入樣本重新生成模板。重復上述過程,直至滿足要求,此時模板創(chuàng)建完成,紅光波段下樣本與模板的平均相關系數提升至0.77。
2.2.2模板應用
將最終生成的模板應用于正射影像的紅光波段圖像中,采用滑動窗口的方式在每個位置上計算備選區(qū)與模板之間相關系數。設置合適的相關系數閾值,本實驗設置閾值為0.7,即相關系數不小于0.7可判斷為坑穴。相關系數計算式為
(1)
式中 (x,y)——待匹配圖像像元坐標
(x′,y′)——模板圖像像元坐標
T——模板圖像
I——待匹配圖像(圖4)
w——模板寬h——模板高
R——相關系數
2.3 基于DSM圓形霍夫變換法提取坑穴數量、寬深參數
由正射影像圖觀察可知,基于DOM提取坑穴主要利用坑穴影子的光譜信息,實際提取得到的是坑穴的影子,因此使用DOM模板匹配法只能獲取坑穴數量信息而無法獲取真實的寬度和深度信息。此外,因山區(qū)地形和天氣變化影響,DOM容易出現色彩不均勻的情況,這對于模板匹配法坑穴提取較為不利。
人工造林坑穴坑面近似于圓形,運用邊緣檢測技術對坑穴對象進行邊界提取,之后基于邊界圖像進行圓形霍夫變換找到其中潛在的圓形可有效提取坑穴對象。在本研究中,基于圓形霍夫變換對圓形坑穴對象進行提取主要步驟包括:邊緣檢測、圓形霍夫變換找圓和坑穴參數計算3個步驟。
2.3.1Canny邊緣檢測
圖像邊緣分布在圖像中像素的灰度、紋理等特征劇烈變化的地方,圖像中的目標與圖像背景的灰度在這些地方必然會存在階躍,表現為函數圖像呈現出劇烈的變化。常用的邊緣檢測算子有Sobel算子、Laplacian算子和Canny算子等,其中,Sobel算子適用于漸變圖像,對邊緣的定位精度不高;Laplacian算子是各向同性的,但是對噪聲比較敏感。對于坑穴DSM數據來說,坑穴邊界高程發(fā)生跳躍式分布,坑穴輪廓清晰,地面情況復雜,本文選擇Canny算子進行邊緣檢測。
Canny算子作為一種標準的邊緣檢測算子,由CANNY在1986年提出,被廣泛應用于各類圖像邊緣提取[20]。Canny算子濾波步驟包括:高斯濾波、梯度幅度和方向計算、非極大值抑制以及雙閾值算法檢測邊緣與連接邊緣。經過Canny算子的處理,坑穴邊界像素大于0,其他像素值全部歸零,從而得到準確的坑穴邊界信息,如圖5b所示。
2.3.2圓形霍夫變換找圓
霍夫變換現在被廣泛用于自動化檢測圖像中的直線、圓或橢圓,其最初的目的是從黑白圖像中提取直線。圓形霍夫變換則主要用于自動化檢測圖像中的圓形,其檢測圓的基本原理為
(x-a)2+(y-b)2=r2
(2)
其中
x=a+rcosθ
(3)
y=b+rsinθ
(4)
式中a、b——圓心橫、縱坐標r——圓半徑
θ——直線法線與x軸的夾角
根據極坐標,圓上任意一點坐標(x,y)(式(2))可以用式(3)、(4)來表示。通過在0~2π之間改變夾角θ,就可以確定任意點是否位于半徑為r、圓心為(a,b)的圓上。
基于Canny算子得到的邊界圖像應用圓形霍夫變換找圓,將物理空間長度參數(m)轉換為圖像空間中像素數,通過考慮坑穴的尺寸與坑穴之間距離來確定霍夫變換參數。圓形霍夫變換使用的參數為(rmin、rmax、mdist、p1、p2、dp),其中rmin為坑穴最小半徑、rmax為最大半徑、p1為梯度,p2為累加器閾值,dp是累加器分辨率和圖像分辨率的反比[21],mdist為霍夫變換檢測到圓心之間的最小距離。本文采用Python-OpenCV編程的方式實現該方法,得到坑穴提取結果,該過程如圖5所示。
2.3.3坑穴寬深參數計算
人工檢測坑穴寬度實際上是量測坑穴面寬的均值,該值約等于圓形霍夫變換得到的圓形直徑d。
由單個坑穴的三維影像點云(圖6)可知,坑穴深度為坑面點與坑底點高程之差。分別統(tǒng)計每個坑穴對象內部像素點高程的最大值和最小值,兩者的差值即為坑穴的深度參數Dp。Z(x,y)表示該坐標像素高程,pv表示坑穴對象內包含的所有像素點。提取公式為
(5)
3 結果與分析
以目視解譯數量和實際測量的坑穴參數作為真值驗證提取參數值,引入正確率(Correctness)、漏檢率(Omission)和誤檢率(Commission)3個檢驗指標,對3種提取方法進行精度檢驗。
3.1 坑穴數量提取精度分析
選取坑穴局部提取結果(圖7),將目視解譯結果作為正確的識別結果,對比分析其他2種提取結果。可以看出,基于DOM模板匹配法(圖7c)相比于基于DSM圓形霍夫變換法(圖7b)有較多的坑穴誤提和漏提現象;基于DSM圓形霍夫變換法則與目視解譯結果最為接近。
利用檢驗指標,分別計算2種方法提取結果的識別精度,如表1所示。結果表明,基于DSM圓形霍夫變換坑穴提取法精度最高,其正確率為95.15%,誤檢率為4.85%,漏檢率為6.56%。該法相較于基于DOM模板匹配法提取的結果,正確率提升明顯,漏檢率得到進一步的控制,更加符合質檢需要。
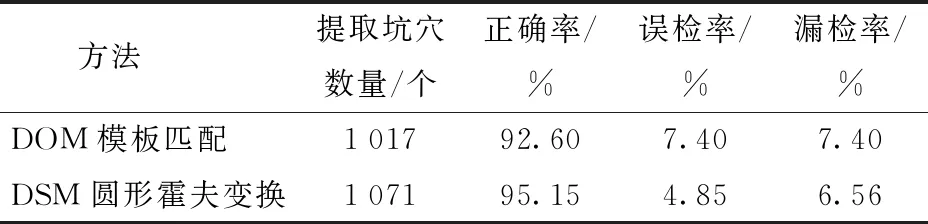
表1 2種方法坑穴數量提取結果Tab.1 Results of two methods in number extraction
3.2 基于DSM圓形霍夫變換法坑穴寬、深參數提取精度分析
實際人工采集20個坑穴的寬、深參數對提取結果進行精度驗證,由實測寬度與提取寬度、實測深度與提取深度線性擬合結果(圖8、9)分析,二者的R2分別達到0.93和0.92,RMSE分別為1.02 cm和1.67 cm,提取參數和實測值之間呈現明顯的相關性,提取結果較為可靠。
3.3 提取方法評價
對比3種方法在提取坑穴數量和寬度、深度參數的耗時、精度、工作量以評估處理速度和適用性,由表2可以看出,相比于人工目視解譯方法的耗時,

表2 3種方法評價Tab.2 Validation results of three methods
其余2種方法在處理速度上顯然更具優(yōu)勢;在考量精度、工作量和自動化程度基礎上,基于DSM圓形霍夫變換法既可提取數量又可提取寬度和深度信息,因而具有最高的適用性。
對于山區(qū)地形來說,因為地形起伏、太陽光線變化以及周邊高大樹木遮擋的影響,最終生產得到的DOM數據可能會存在色彩不均勻的現象。基于模板匹配法提取坑穴對象要求DOM色彩分布均勻,當坑穴目標位于陰影下或者曝光過度區(qū)域則容易導致漏檢和誤檢,從而使得整體漏檢率和誤檢率偏高。此外,模板質量對模板匹配法提取坑穴的精度影響較大,樣本的選取要求較高,這在一定程度上降低了處理效率和精度。
基于DSM圓形霍夫變換法一方面利用簡單幾何知識和常識快速確定算法所使用的參數,且不需要人工選擇樣本,人工干預較少,處理效率和精度相比于基于DOM模板匹配法提升明顯;另一方面它在獲取坑穴數量信息的同時也可得到高精度的寬度和深度信息,適用于現階段造林坑穴數量和寬度、深度參數的自動化提取。
4 結束語
無人機遙感應用于造林坑穴數量和坑穴寬度、深度參數提取切實可行。結合無人機影像,相較于基于DOM模板匹配法92.60%的正確率,基于DSM數據的圓形霍夫變換法坑穴數量提取正確率達到95.15%,誤檢率和漏檢率均處于較低水平,坑穴寬度和深度提取結果與實測驗證值R2分別達到0.93和0.92,RMSE分別為1.02 cm和1.67 cm,滿足質檢要求。該方法相比于現場人員抽查檢測更加客觀、科學和高效,是坑穴信息提取的最佳解決方案。本研究在數據采集過程中,地面控制點坐標采集降低了工作效率,建議在實際生產中使用自帶RTK型無人機來獲取影像數據,生產得到高精度DSM。
