一種基于信號級特征的S模式輔助譯碼方法
2021-02-15 08:49:12趙浩然
火控雷達技術 2021年4期
鄭 超 趙浩然
(四川九洲空管科技有限責任公司 四川綿陽 621000)
0 引言
20世紀70年代以來,二次雷達作為空中交通管制的傳感器被廣泛使用并不斷發展。與一次雷達通過發射電磁波并接收目標反射回來的電磁波來測量目標的距離、速度、高度等信息不同,二次雷達通過地面接收機發射詢問信號,當機載應答機接收到詢問信號后解析詢問信號,并按照相應格式進行應答,應答信息包含飛機代碼、高度、距離等信息。隨著計算科學的迅速發展,雷達的數字化特征和軟件化特征日趨明顯,數字化雷達以面向功能為核心,注重標準化模塊化數字平臺構建,模擬的信號被量化后以離散數字的形式表達,軟件化雷達以面向需求為核心,信息以數據的形式表達,功能由軟件定義,功能開放,性能可擴展。這就要求雷達設計人員從不同維度嘗試新的方法解決雷達存在的問題,同時也提供了使用新方法的平臺。
傳統二次雷達采用A/C模式進行航空管制,其中A模式共有4096種編碼,表示飛機代碼等信息,C模式共2048種編碼,表示飛機的高度信息[1]。近年來,隨著空中交通日益繁忙、空中電磁環境日趨復雜,A/C模式二次雷達暴露出較多缺點,主要表現在同步竄擾、異步干擾以及代碼數量少不能滿足飛行要求等,這些都嚴重降低了數據使用效率。在這種情況下S模式的使用被提上日程[2],相對于A/C模式,S模式具有如下優點:第一,S模式的飛機的地址碼用24位表示,可以表征的飛機數量是A/C模式的數千倍,有效緩解了編碼數量不足的缺點;第二,S模式采用全呼和點名的方式進行詢問,可以針對某個目標進行單獨詢問,降低詢問次數,提高數據使用效率;第三,較A/C模式,S模式的信息精度提高了2倍;第四,S模式具備數據鏈功能,可傳遞更多信息。但是,與此同時,鑒于S模式詢問的次數較少,S模式數據位數較長,S模式應答信號譯碼本身難度增大,而且被其他模式應答干擾從而造成信號交織竄擾的可能性也變大,造成數據無效的風險增大進而會威脅安全飛行,因此除了常規譯碼手段外急需多種手段輔助譯碼、排除干擾、解決交織竄擾從而保證數據的使用效率。在近年的研究中,有組織和專家學者提出把整個地區區域的所有S模式雷達系統進行組網用于解決干擾、交織等二次雷達系統存在的問題[3-4],該方法是一個系統工程,實現后可以大幅提高二次雷達的運行效率,但是其缺點是成本高代價大的同時并不能提高單部二次雷達系統的性能;提高單部S模式二次雷達性能的已有文獻主要是通過陣列信號數據處理的方法從空域上對信號就行分離處理,主要涉及MUSIC、PA(投影技術)等方法[5-7],這些方法能夠取得良好效果的前提是二次雷達系統采用陣列天線接收信號,但是目前很多二次雷達系統依然采用傳統機械掃描的方式,限制了這些方法的使用。
考慮到飛行器、二次雷達機載應答機、飛行器S模式代碼在飛行過程中具有一一對應性和長期對應不變性(每個飛行器有其唯一S模式代碼,機載應答機一般不會更換),以及每個機載應答機在制造過程中由于工藝、硬件器件的微小差異造成的其發射信號的細微差異(即使兩個應答機發射信號代表的信息相同,信號脈沖內及脈沖間也有細小差異),對采集到的應答信號進行特征提取和特征匹配從而唯一識別應答機輻射源進而獲得其S模式代碼成為一種可能的輔助譯碼方式。本文從應答信號的信號級特征出發,以未受干擾的S模式信號作為訓練數據,以S模式地址作為訓練數據的標簽,提取所觀測目標發射信號的信號級特征形成目標信號級特征庫,當目標信號受到干擾而不能正確譯出其S模式代碼時,利用信號特征匹配方式識別目標代碼用于輔助譯碼。相對于傳統的譯碼方式,該方法利用每個應答機輻射源自身硬件固有特點反應到信號上的信號級表現特征實現對目標的識別,從另一個維度實現了目標識別,可以作為重要補充手段用于輔助譯碼,在任意天線系統條件下皆可使用。本文的結構如下:第一部分為引言,主要介紹本文的背景及所提出的方法的必要性;第二部分為本文的主要內容,以S模式的一個應用ADS-B信號為例介紹了算法的整體流程、S模式信號格式、信號預處理方法、特征提取以及特征匹配的方法;第三部分為實驗仿真及結果,通過空中實采數據驗證了方法的有效性;第四部分為總結和展望。
1 算法模型
1.1 算法總體流程
本文以S模式的一個應用ADS-B信號為例,闡述算法模型。ADS-B信號的發射頻率為1090MHz,信號總幀長為120μs,調制方式采用脈沖位置調制(Pulse Position Modulation,PPM)。120μs的信號幀長分為8μs的報頭信號和112μs的數據域,報頭包含4個前導脈沖,這4個脈沖分別位于0μs、1μs、3.5μs和4.5μs處,從第8μs開始為數據位,數據位長112μs(S模式還可能為56位),共有112個bit,每個比特包含兩個碼元,若脈沖位于前置位碼元,則該碼元表示比特1,若脈沖位于后置位碼元則表示比特0[8],如圖1所示。
接收機對空中ADS-B信號(由于ADS-B信號具有身份信息,所以可以給每段信號打標簽形成訓練集)進行截獲采樣,采樣后由于信號強度不同需要對信號進行幅度歸一化等預處理操作,進而對歸一化信號進行信號變換并根據特征提取方法提取樣本信號特征,從而形成數據特征庫;之后有未知目標(真實目標或干擾信號)到來時,可以設計相應的分類器來進行特征匹配,從而識別目標。整個過程如圖2所示。
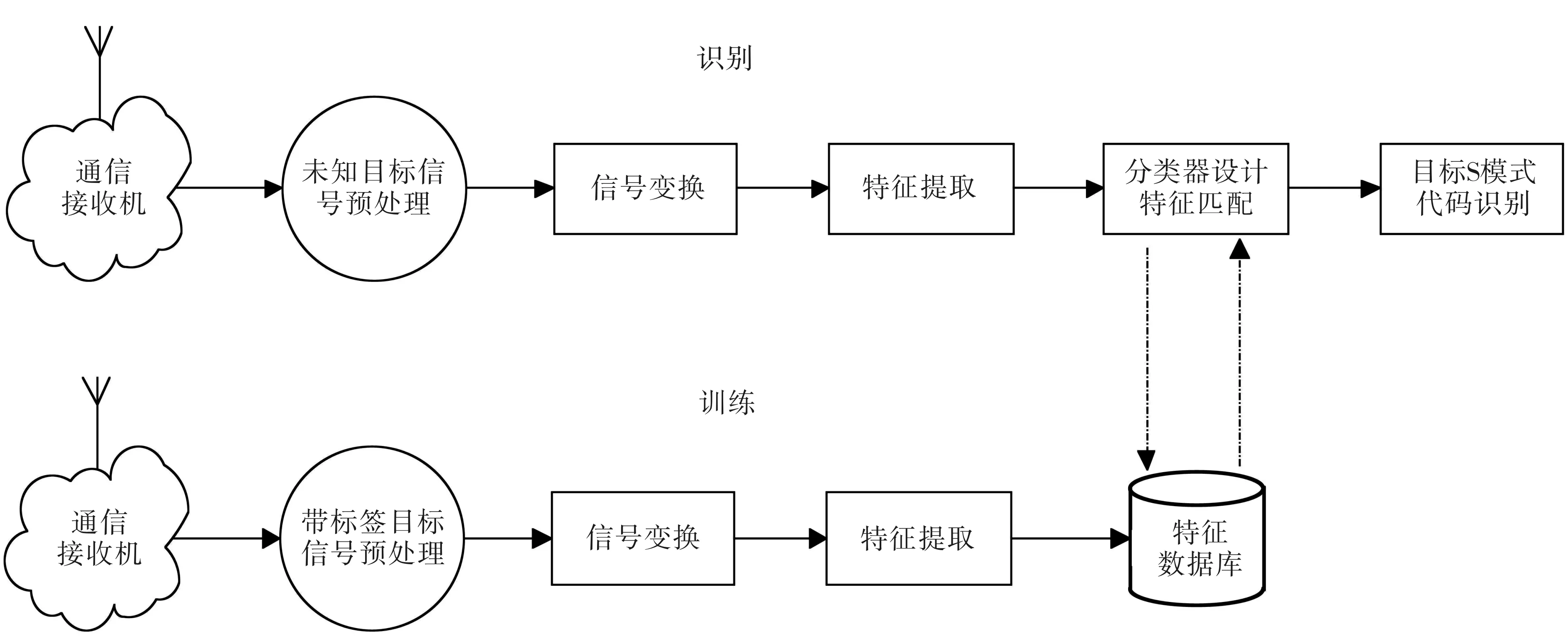
圖2 訓練及識別過程
由于所有ADS-B信號的前4個前導脈沖格式是相同的,因此可采用前4個前導脈沖為訓練數據,這樣的話可使用后端信息為標簽制作訓練集并且可以避免所用脈沖過多而造成的干擾和過擬合。
1.2 信號預處理
信號預處理過程,實際上是在盡量保證信號特征不丟失的情況下,對其幅度信息進行歸一化的過程,這樣做的好處是有利于后期用同一標準處理信號。由于輻射源的距離和所處環境不同,采集到的數據必須經過幅度歸一化等信號整形過程才能進行數據分析從而找到能滿足作為信號特征性質的標量,因此預處理過程是實現算法的重要步驟。
針對ADS-B信號,其信號處理與數據處理主要包括信號解調、有效脈沖提取及沿檢測(VPP、REP)、報頭檢測、參考功率計算、DF認證、功率一致性檢測、重觸發、參考幅度值提取、比特位解調以及校驗等過程[8]。若一個ADS-B信號通過上述過程最終通過校驗,則截取其4個前導脈沖并做預處理后作為訓練數據存入數據庫中(以其ADS-B地址信息作為標簽);若該信號沒有通過校驗,則需要輔助譯碼,此時依然截取其4個前導脈沖并做預處理(在前導脈沖沒有被干擾情況下),利用本章后面所述方法進行特征匹配從而識別其代碼。預處理過程是通過脈內幅度歸一的方法,具體如下:
1)提取4個前導脈沖數據并計算脈內幅度;
2)設計一個絕對數值,使得所有信號的4個前導脈沖的脈沖平均值都為這個值。
脈內幅度歸一前后的結果如圖3、圖4所示。
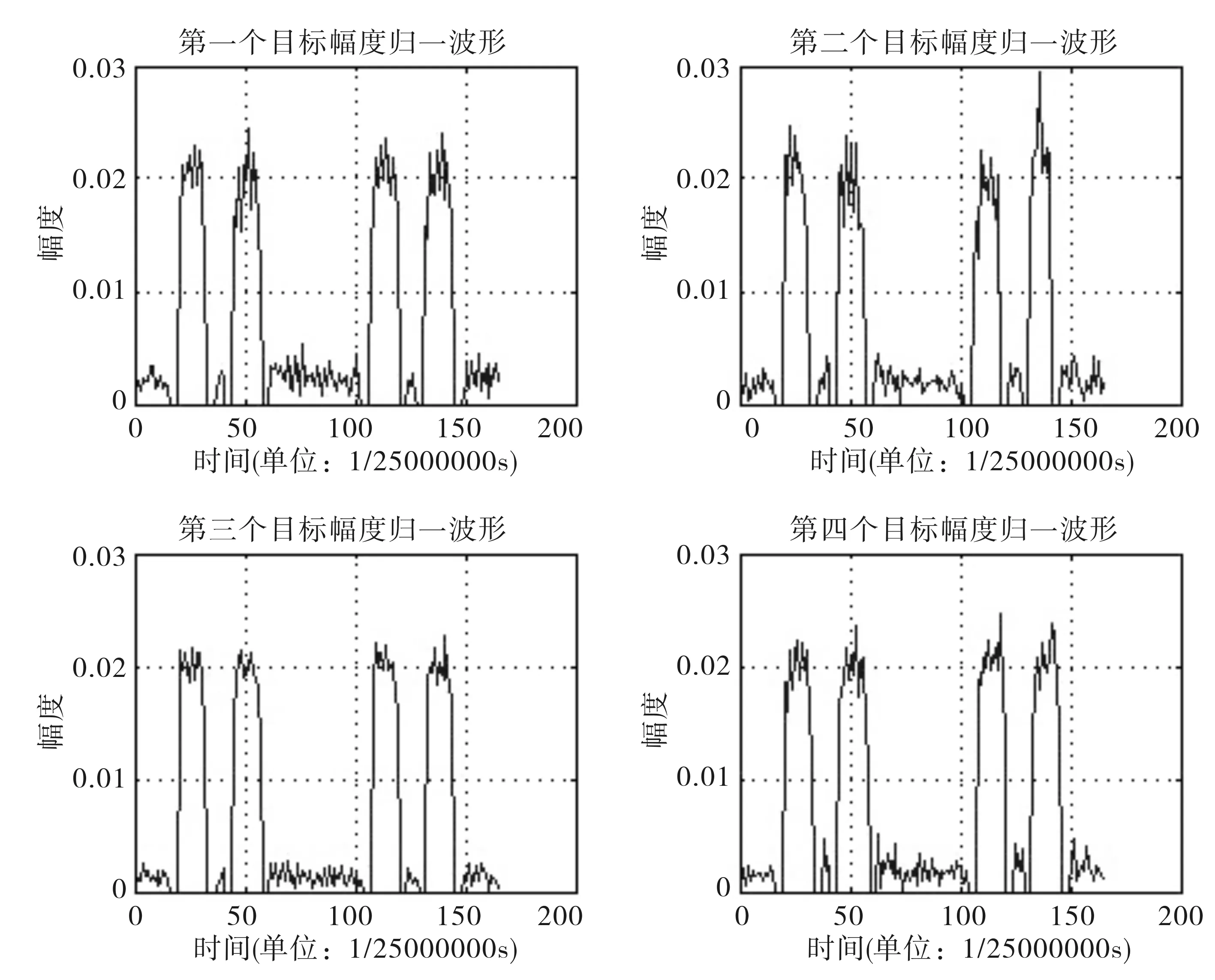
圖4 預處理后波形
1.3 時頻變換與特征提取匹配
為了有效提取信號特征,需要從不同的角度去認識、分析信號,這樣有助于了解信號的本質。我們從空中采集的信號是以時間的形式存在的,而直接在時域中針對兩個調制參數相同的信號很難直接提取其特征進而實現個體識別。常用的時頻變換包括短時傅里葉變換、小波變換、魏格納變換、模糊函數以及信號的高階累積量等等,這些信號變換后的數據為找到信號特征提供可能性。鑒于魏格納變換具有諸多良好的性質[9],本文采用魏格納變換作為時頻變換依據。
設信號x(t),y(t)的傅里葉變換分別是X(jΩ),Y(jΩ),那么,x(t),y(t)的聯合魏格納分布定義為
信號x(t)的自魏格納分布定義為
魏格納分布具有如下性質:
1)對稱性:復值信號x(t)的魏格納分布是實函數,即
進而可得實信號x(t)的魏格納分布式頻率的偶函數,即
Wx(t,Ω)=Wx(t,-Ω)
2)位移性:x(t)時移τ,其魏格納變換Wx(t,Ω)也時移τ,即
x(t-τ)?Wx(t-τ,Ω)
除此之外,它還具有定義域的同一性、積分性等良好的性質。對4個前導脈沖進行魏格納變換,之后利用Fisher判別比提取目標信號特征信息,Fisher判別比定義為
(σ(c)[η,τ])2=
2 仿真驗證
利用ADS-B地面接收機接收空中3個飛行目標發射的ADS-B信號數據,對接收到的數據進行解調、譯碼以及校驗。以通過校驗的信號數據作為訓練和測試數據,其中每個目標有20個訓練樣本(以其ADS-B地址數據作為樣本標簽),其余通過校驗的信號數據作為測試數據。
對于目標的所有訓練信號樣本,提取信號的4個前導脈沖的信號特征,提取的3個目標20個樣本數據的特征投影到二維空間中的示意圖如圖5所示,從圖5中可以看出,通過特征提取方式提取的特征,在類間已經形成明顯差異,可以實現分類。圖6為此三個目標特征投影到一維空間形成的效果。
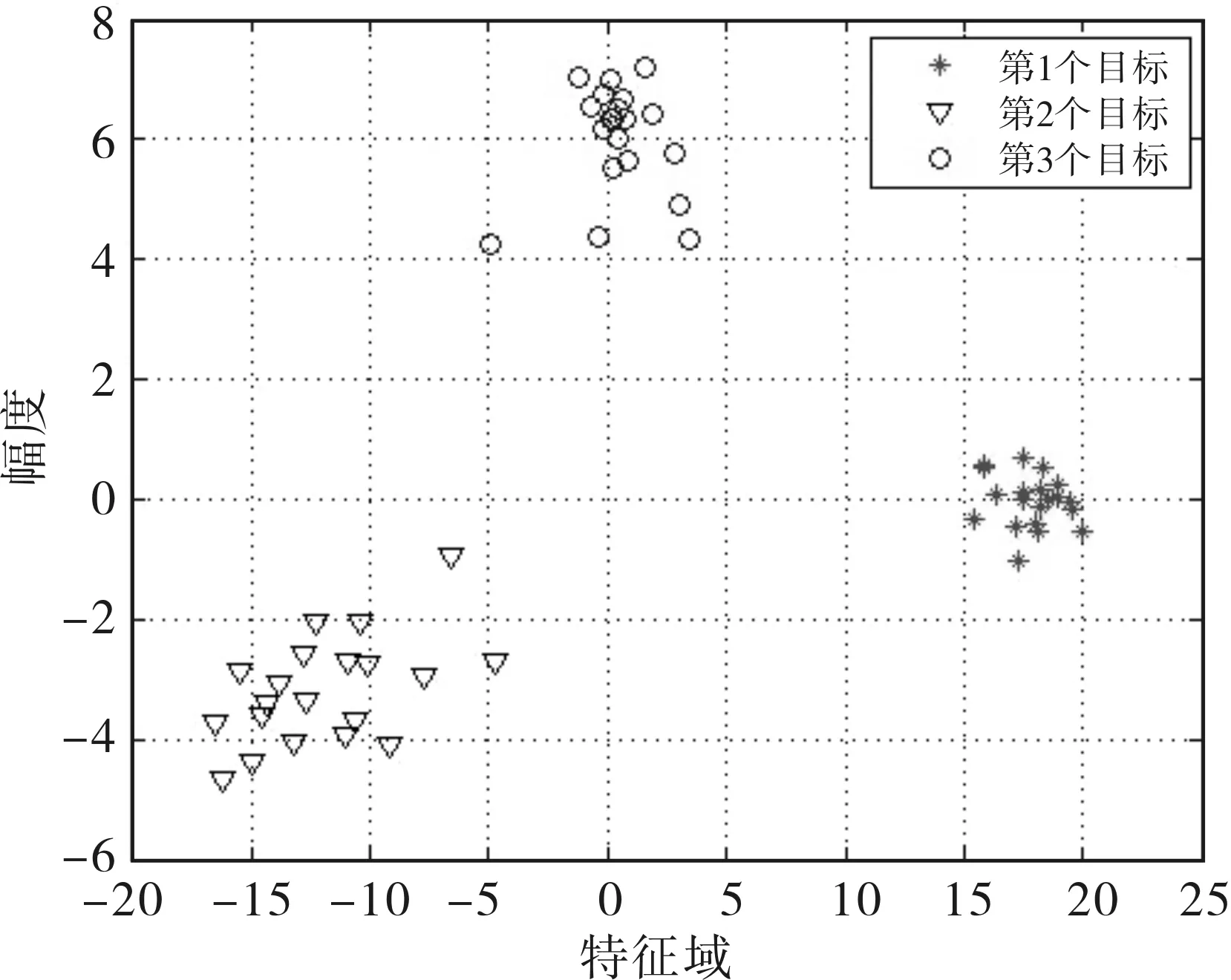
圖5 三個目標的二維特征圖
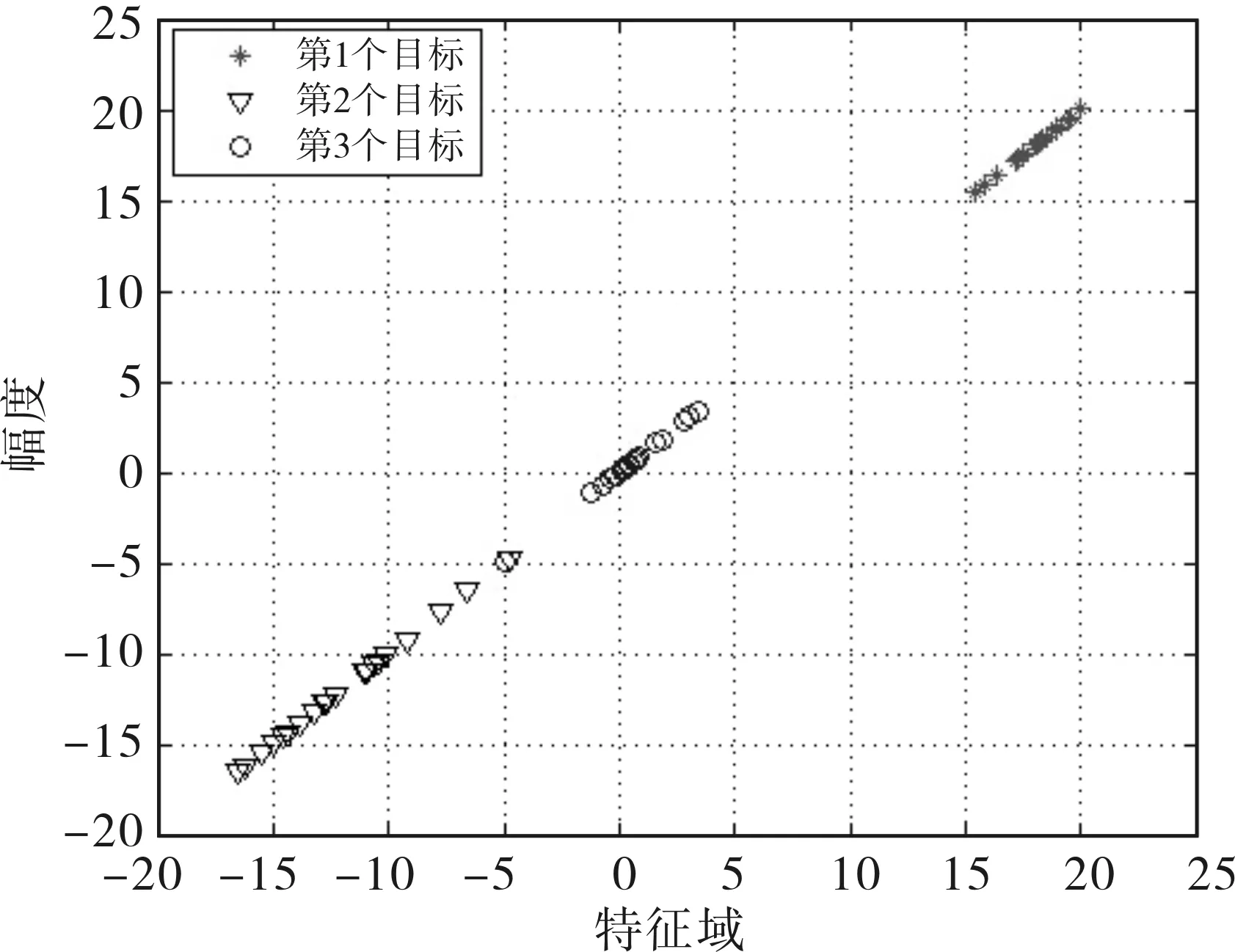
圖6 三個目標一維特征
從圖6中可以看出,每個目標的信號具有較明顯的特征,對測試數據進行特征匹配,3個目標識別的正確率分別為96.7%、98%、97%,達到了較高的識別率,從而可以直接識別應答機輻射源從而在特征庫中直接對應到3個目標的S模式目標代碼輔助譯碼。
3 結束語
本文提出的基于目標信號級特征識別目標從而輔助譯碼的方法通過對目標信號4個前導脈沖做時頻變換并訓練匹配得到了較高的識別概率,提高了譯碼成功率。除S模式的前4個前導脈沖外,更多可用的信號信息應當被利用用于解決更多模式的譯碼及其它功能問題;另外,基于深度神經網絡等機器學習方法進行信號數據訓練、特征提取及應答機輻射源識別都是值得研究的方法。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00