兩維相控陣UV域測(cè)角分析及應(yīng)用
2021-02-15 08:49:12崔向陽(yáng)付學(xué)斌朱永杰
火控雷達(dá)技術(shù) 2021年4期
關(guān)鍵詞:方向
崔向陽(yáng) 付學(xué)斌 朱永杰 邱 天
(西安電子工程研究所 西安 710100)
0 引言
三坐標(biāo)雷達(dá)能夠同時(shí)測(cè)量目標(biāo)的距離、方位、俯仰信息。多數(shù)三坐標(biāo)雷達(dá)采用俯仰上電掃描的線性陣列天線,方位上機(jī)械掃描。一維電掃描雷達(dá)不能充分發(fā)揮相控陣?yán)走_(dá)的特點(diǎn)和優(yōu)勢(shì)。兩維電掃描雷達(dá)在觀察導(dǎo)彈目標(biāo),多目標(biāo)探測(cè)與快速響應(yīng),同時(shí)跟蹤多個(gè)高空/地面目標(biāo),目標(biāo)識(shí)別,提高雷達(dá)生存和ECCM方面獲得了多項(xiàng)改善[1]。
機(jī)掃雷達(dá)可以用原點(diǎn)在天線相位中心的球坐標(biāo)系來(lái)描述,而對(duì)于電掃雷達(dá),當(dāng)掃描波束偏離法線時(shí),波束將展寬,且形狀也有變化。這里就希望選取天線方向圖不隨電掃描角度變化,只與相鄰陣元輸入波程差相關(guān)的坐標(biāo),即所謂的正弦空間坐標(biāo)系,簡(jiǎn)言之,就是單元球面在陣列平面上的投影[2]。
對(duì)于正弦空間(sinθ),選取不同的入射角,都可以作為正弦空間。本文的主要內(nèi)容是選取合適正弦坐標(biāo)系,引入側(cè)方角(broadside angle)的概念,以簡(jiǎn)化工程實(shí)現(xiàn)。并分析了正弦空間坐標(biāo)下測(cè)角相對(duì)于直角坐標(biāo)下的便利之處,同時(shí)提出了工程實(shí)現(xiàn)的方案。
1 正弦空間坐標(biāo)系定義
正弦空間是研究數(shù)字陣列掃描波束編排與分布特性的數(shù)學(xué)工具[3],是要獲得單元球面在陣列平面上的投影。在正弦空間下,波束寬度與角度使用正弦值表示,此外天線的方向圖也不再隨著掃描的角度發(fā)生變化,只與相鄰陣元的波程差等比例延時(shí)[4]。要獲得投影,首先描述球坐標(biāo),在球坐標(biāo)中描述空間的點(diǎn),通常使用距離和兩個(gè)角度,如圖1、圖2所示。
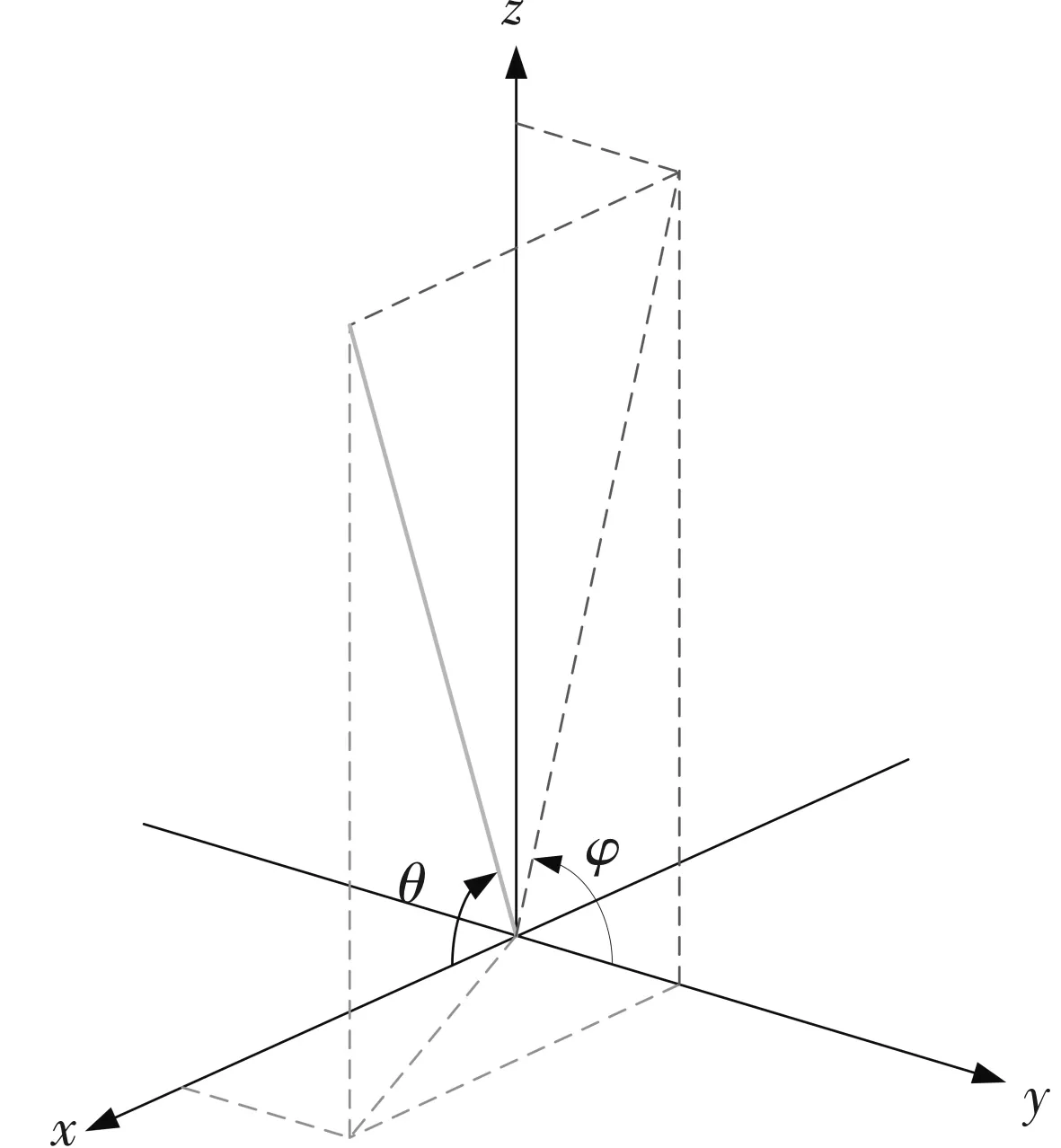
圖1 theta和phi表示球坐標(biāo)
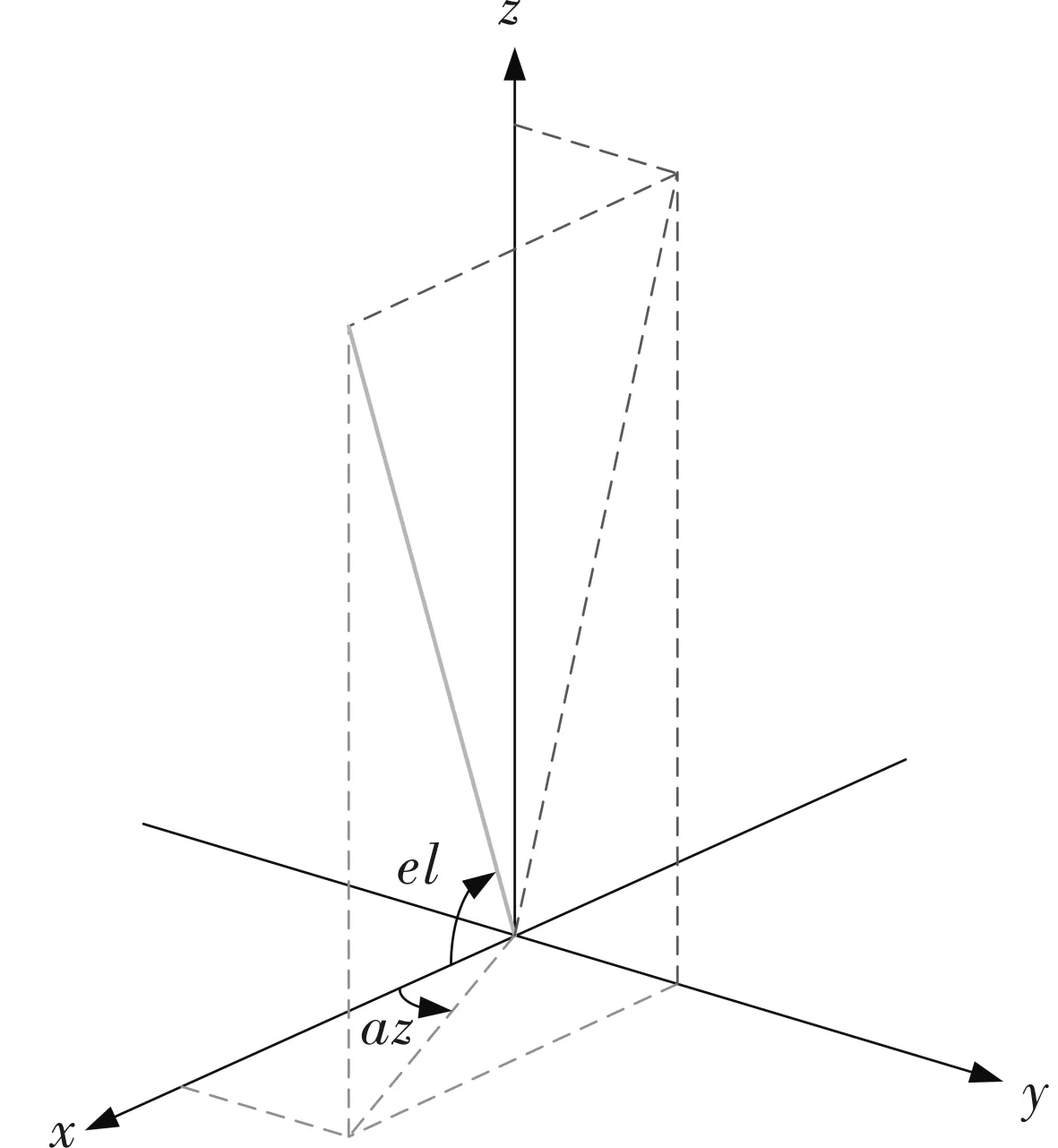
圖2 az和el表示球坐標(biāo)
為了方便分析,工程中采用的陣列坐標(biāo)系認(rèn)為與空間(站心)坐標(biāo)系重合[5]。各角度說(shuō)明見(jiàn)表1所示。
可以得到,對(duì)應(yīng)的投影關(guān)系[6-8]即對(duì)圖1其表示的正弦空間為
u=sin(θ)cos(φ)
v=sin(θ)sin(φ)
對(duì)圖2其表示的正弦空間為
u=cos(el)sin(az)
v=sin(el)
定義陣面直角坐標(biāo)為:陣面為yz平面,y為水平方向,z為高低方向,x為陣面法向,陣元位于yz平面上,o點(diǎn)為陣面幾何中心,xa、ya、za主要用于表征陣元所處陣面的相對(duì)位置,正視天線陣面時(shí),陣面右側(cè)ya為正、陣面上側(cè)za為正,其與對(duì)應(yīng)的陣面直角坐標(biāo)系的轉(zhuǎn)換關(guān)系為[9]
x=Rcos(el)cos(az)
y=Rcos(el)sin(az)
z=Rsin(el)
即可知其對(duì)應(yīng)的波程差引起的相位差為
Phaseae(ya,za)=2π(cos(el)sin(az)ya+
sin(el)za)/λ
(1)
由式(1)能夠看到,其波束在指向上方位和俯仰具有耦合性,使得在方向圖測(cè)試和系統(tǒng)波束規(guī)劃時(shí),并不直觀。由此引入側(cè)方角(broadside angle)的定義。
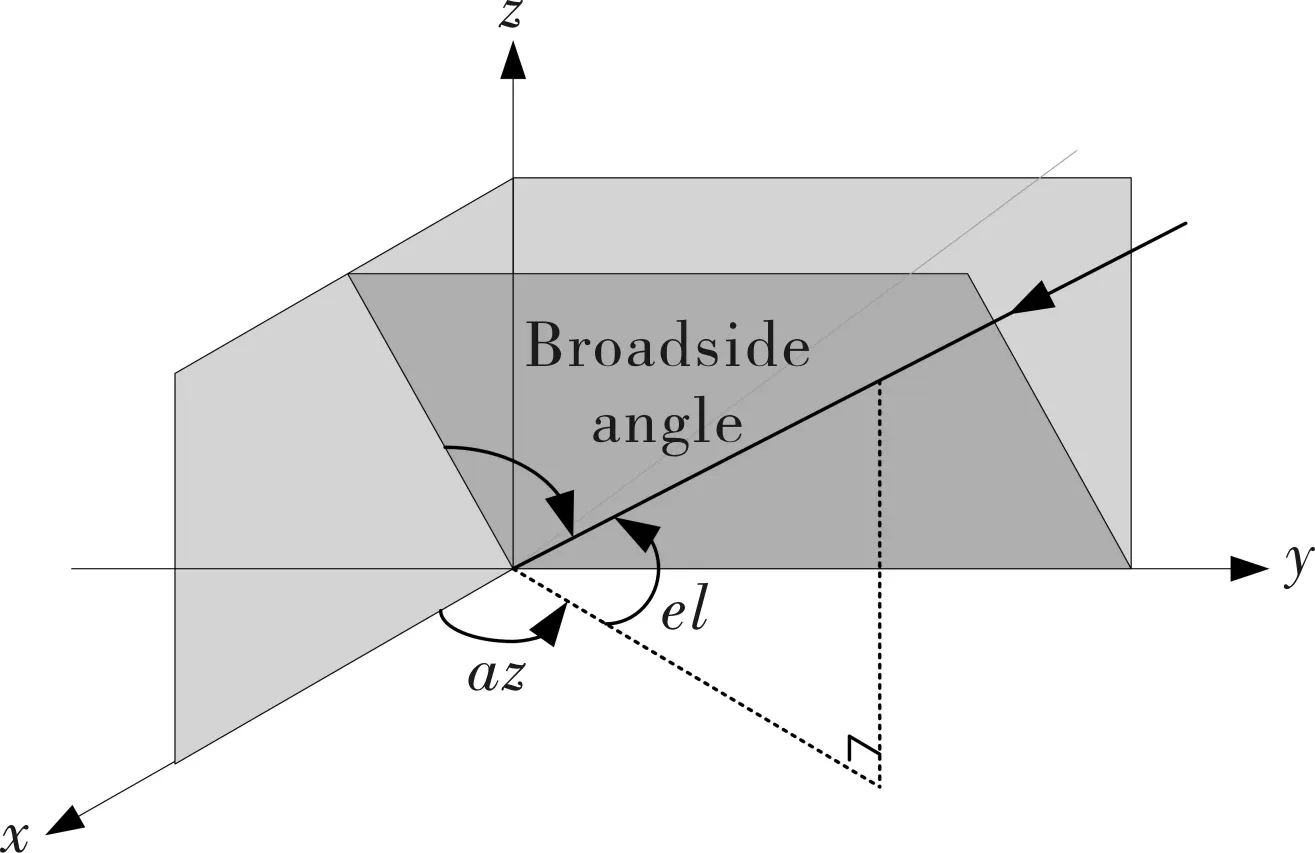
圖3 broadside angle 定義
側(cè)方角是這樣的一個(gè)角,它是法線在陣列軸(y軸)與入射方向所確定平面上的投影與入射角之間的夾角,值域從-90°~90°,通常情況下的AOA(信號(hào)入射方向估計(jì))估計(jì)獲得的也是這個(gè)角[10]。
淺灰色陰影區(qū)域是入射角和陣列軸確定的平面,在軸的正向時(shí)測(cè)量時(shí),broadside角為正。在很多情況下,使用broadside角代替方位角和俯仰角,因?yàn)樵摻菍?duì)于幾何方向的描述性更便捷。
broadside角記為
sin(β)=sin(az)cos(el)
(2)
用方位角和俯仰角表示broadside角有許多特性:
1)對(duì)于俯仰角為0時(shí),broadside等于方位角。
2)在xoy平面的上和下相等的角度,broadside角相等。
這兩點(diǎn)在波束方向圖測(cè)試和空域規(guī)劃時(shí)有明顯的優(yōu)勢(shì)。
式(1)變?yōu)?/p>
Phaseuv(ya,za)=2π(u·ya+v·za)/λ
(3)
其中u=sin(β)、v=sin(el);為本文討論所用的正弦空間。
2 UV域測(cè)角分析
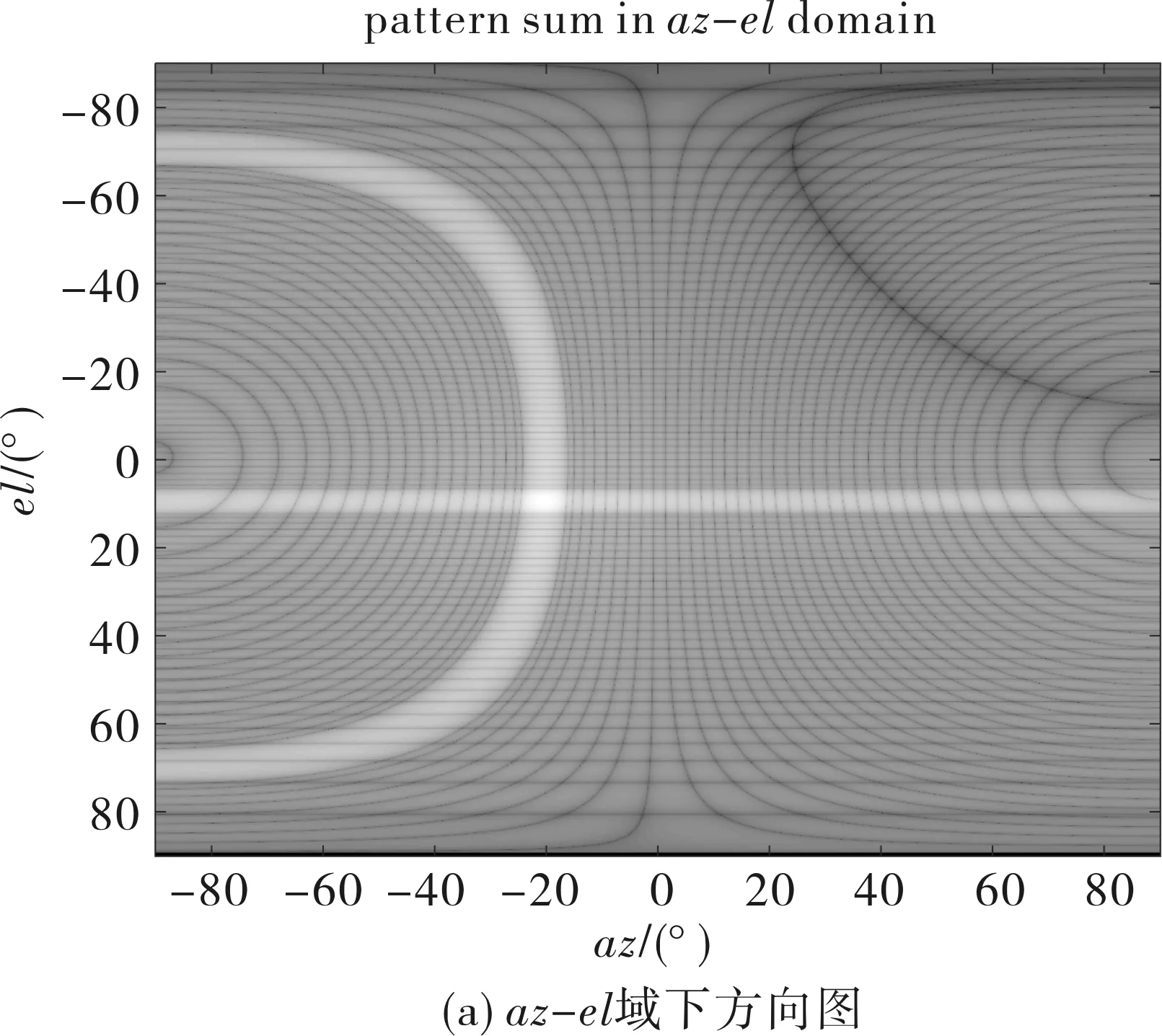
不失一般性兩維陣取陣面球坐標(biāo)系指向[-20,10]。
由圖4(a)可見(jiàn),用az-el表征指向時(shí),偏離波束指向位置發(fā)生彎曲。由圖4(d)且在同一波束域內(nèi),不同v值下的測(cè)角曲線可以用一條進(jìn)行表征。下面我們?cè)O(shè)計(jì)兩個(gè)波束指向,并對(duì)其測(cè)角曲線進(jìn)行分析。
由圖5可見(jiàn),頻率歸一化后的比幅曲線能夠用同一組數(shù)據(jù)進(jìn)行表征,即不同頻率、不同指向均用同一比幅曲線進(jìn)行角誤差計(jì)算。
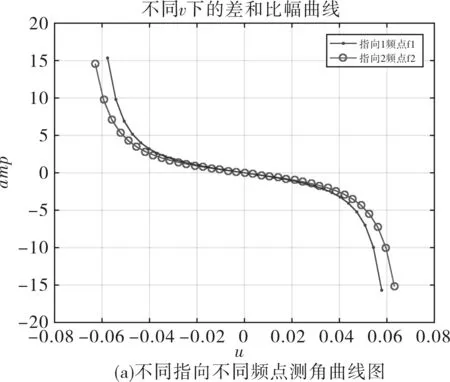
波束a、b指向角為陣面球坐標(biāo)系下az、el角分別為[-20°,10°],[30°,20°],按照域變換后得到的uv域下比幅測(cè)角曲線如圖所示,其中兩組曲線各自按照u=cos(el)sin(az)進(jìn)行歸一化。由圖5可見(jiàn),歸一化后的測(cè)角曲線能夠用同一組數(shù)據(jù)進(jìn)行表征,即可以將az、el解耦處理。
3 實(shí)現(xiàn)方式及實(shí)驗(yàn)結(jié)果驗(yàn)證
上位機(jī)使用u-v域計(jì)算配相值,發(fā)送至空域處理器進(jìn)行DBF合成,檢測(cè)處理機(jī)進(jìn)行檢測(cè)并根據(jù)相鄰波束的目標(biāo)回波幅度差和比進(jìn)行查測(cè)角曲線,該曲線為u-v域u維和v維兩條測(cè)角曲線,查表得到△u/λ和△v/λ,進(jìn)而求得△u和△v,再根據(jù)u′=u0+△u,v′=v0+△v,將u′和v′轉(zhuǎn)換至陣面球坐標(biāo)系(az,el)后送至中心機(jī)或數(shù)據(jù)處理,中心機(jī)或信號(hào)處理根據(jù)碼盤及天線傾角計(jì)算目標(biāo)在站心球坐標(biāo)系下的角度信息(AZ,EL)。
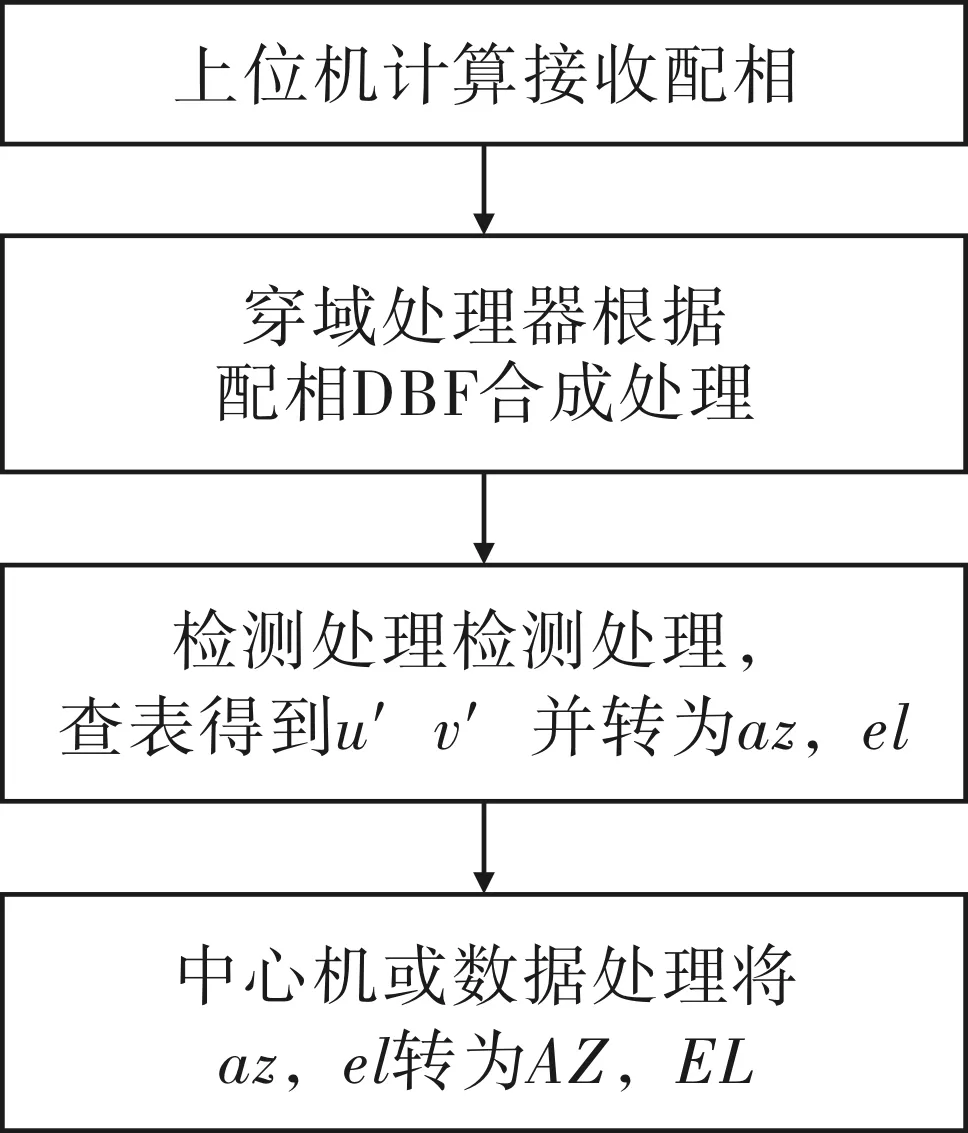
圖6 處理流程
實(shí)際測(cè)量得到的天線方向圖可以驗(yàn)證上述結(jié)果,由于天線遠(yuǎn)場(chǎng)測(cè)試條件會(huì)對(duì)測(cè)量結(jié)果有一定影響,與理論值略有差距。圖7(b)能夠看到,圖7(a)在大地坐標(biāo)系下,隨著波束角度偏移0°位置,波束變寬;而在圖7(b)中,利用UV空間表述時(shí),在角度測(cè)量范圍的線性區(qū)域中,其測(cè)角曲線斜率基本一致,對(duì)于角度測(cè)量時(shí)在正弦空間下,可以近似使用一個(gè)斜率K值,大大簡(jiǎn)化了天線方向圖的測(cè)試工作。
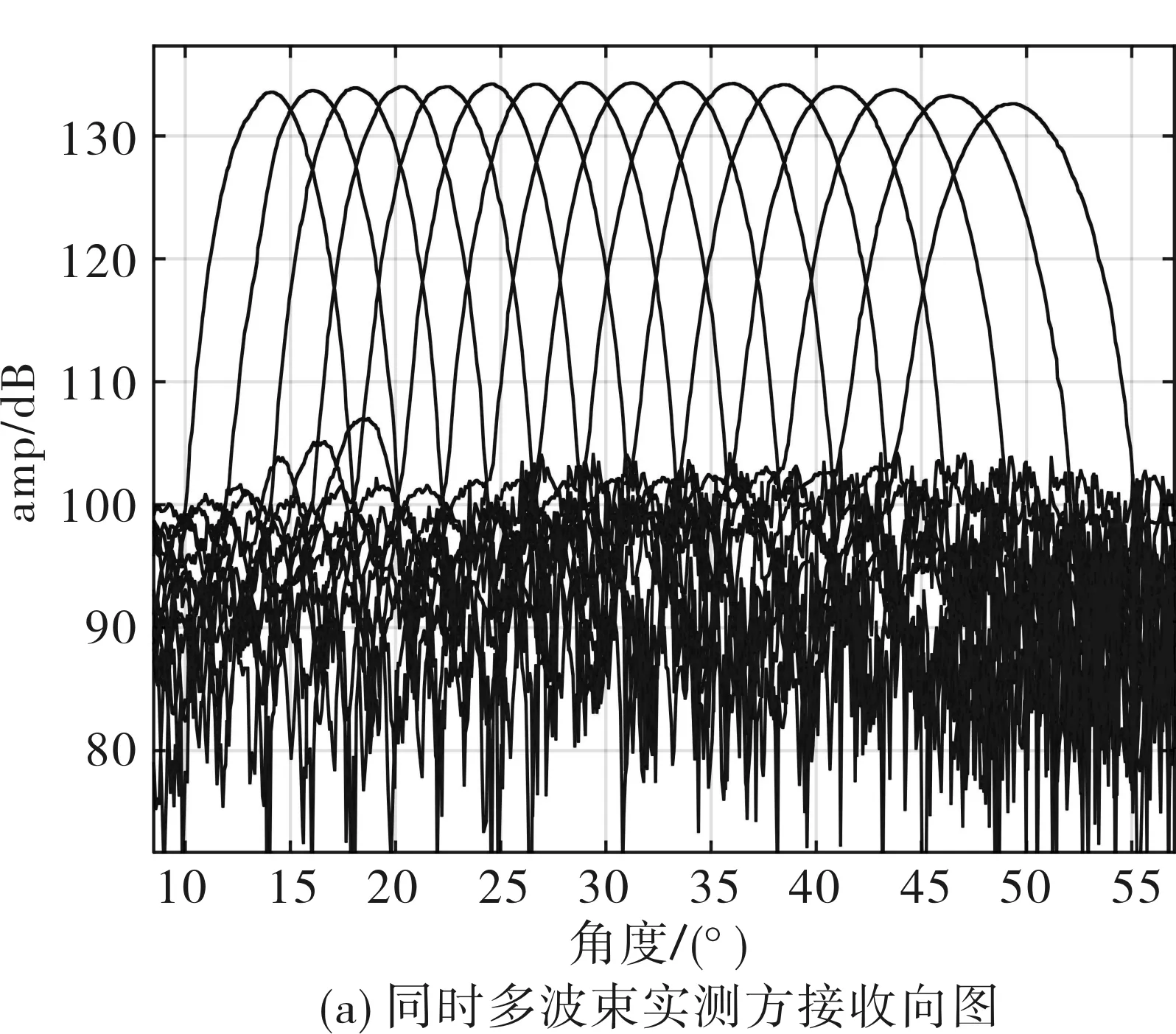
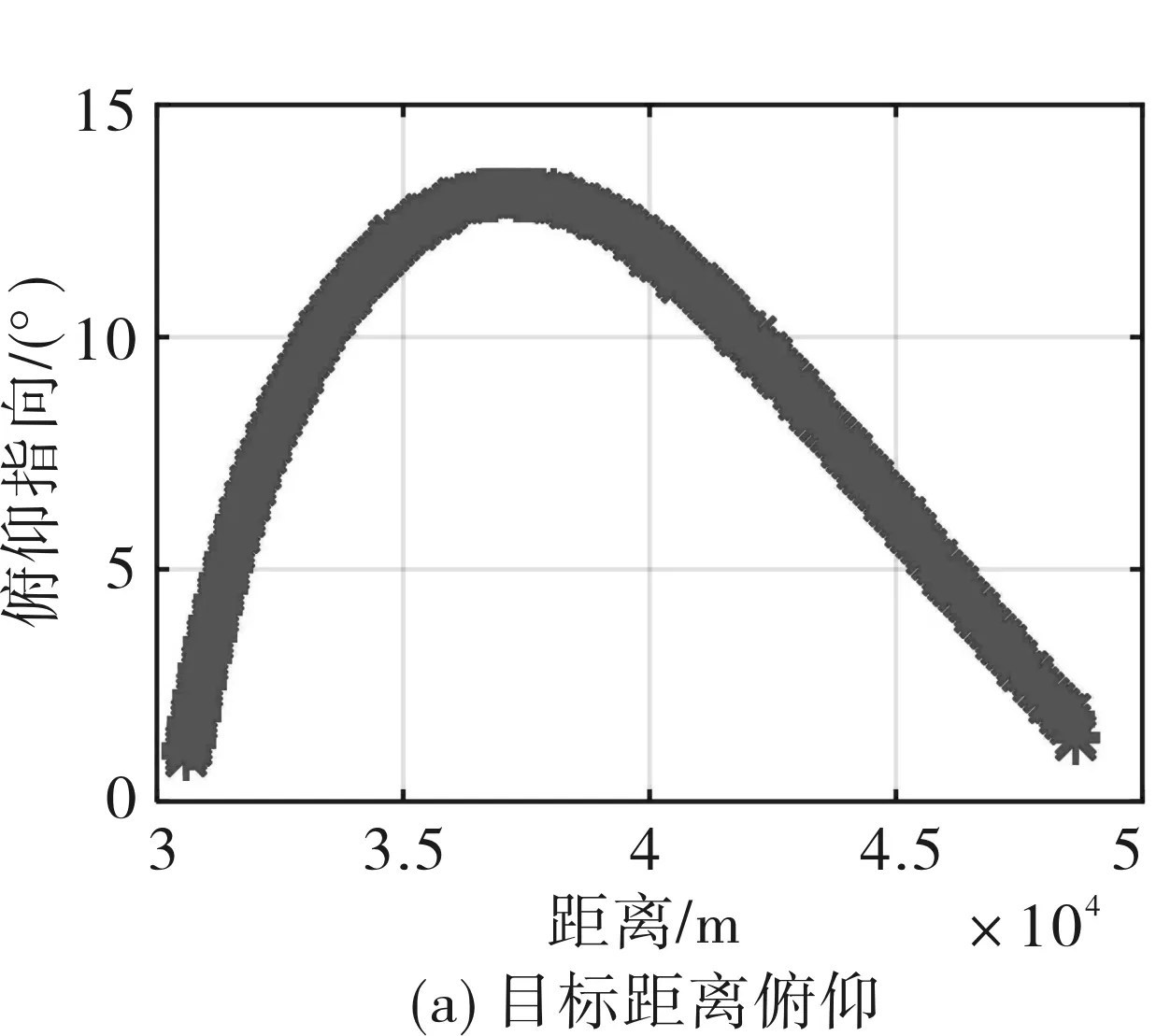
圖8是本雷達(dá)系統(tǒng)對(duì)于某彈丸類目標(biāo)進(jìn)行跟蹤時(shí)的點(diǎn)跡信息,可以看到使用本文提到的波束規(guī)劃及測(cè)角方法,對(duì)目標(biāo)跟蹤時(shí)航跡穩(wěn)定可靠,角度測(cè)量及波束調(diào)度準(zhǔn)確,驗(yàn)證了該方法的可行有效。
4 結(jié)束語(yǔ)
對(duì)于兩維電掃描雷達(dá),當(dāng)掃描波束偏離法線時(shí),波束將展寬,且形狀也有變化。本文采用了正弦空間坐標(biāo)及對(duì)應(yīng)的配相公式,通過(guò)引入了側(cè)方角提出了一種在工程實(shí)現(xiàn)時(shí)簡(jiǎn)便易行的方法,簡(jiǎn)化系統(tǒng)波束規(guī)劃和測(cè)角曲線的測(cè)量。經(jīng)仿真及工程驗(yàn)證,該方法可行有效。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂(lè)天地(音樂(lè)創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50