單兵巡飛彈弱彈道環境智能感知系統
2021-02-18 11:17:26殷志臣婁文忠馮恒振
探測與控制學報 2021年6期
何 博,殷志臣,婁文忠,馮恒振
(1.北京理工大學機電學院,北京 100081;2.陸軍研究院通用裝備研究所,北京 102202)
0 引言
單兵巡飛彈是一種可以實現多模式發射及投放的武器系統,具有情報偵察、目標指示、信息中繼、區域封控、精確打擊和毀傷評估等特征[1-4]。作為一種小型高智能武器系統,引起了美國、俄羅斯、以色列、英國、德國等國家的廣泛關注,先后加入了單兵巡飛彈的發展行列。單兵巡飛彈的測試面臨的挑戰主要是更小的體積空間,識別更弱的彈道環境和在與高度信息交互的過程中可靠地感知彈道環境。一般單兵巡飛彈的體積較小,這就要求巡飛彈藥彈道環境感知系統所占體積盡可能小[5-6]。單兵巡飛彈整個彈道環境微弱,其“弱”量級表現為最大過載為百g量級,且持續時間短暫,為ms量級,彈體全程不旋轉,故這種處于弱環境力的彈藥測試研制過程中,對于彈道環境的感知變得尤為重要。必須通過感知微弱環境力的變化實現保險的可靠順序解除[7-9],故提高彈道環境檢測精度成為單兵巡飛彈測試研制過程中的重要組成部分[10-11]。國內外對此展開了技術研究和型號研制,以美國“彈簧刀”單兵巡飛彈為代表。俄羅斯、德國等國也對單兵巡飛彈進行了大量研究,并服役于作戰部隊,通過不斷地研究更新,實現了組網以及對目標的精確打擊和高效毀傷,但是彈道環境感知精度不高[12-14]。我國的單兵巡飛彈研制起步晚,技術力量主要集中于巡航時間、控制算法和毀傷效能[15-18],并且用于巡飛彈安全解除保險的弱環境力感知系統研究滯后。
針對單兵巡飛彈具有弱彈道環境的特點,無法根據劇烈環境變化實現各級保險有效解除的問題,設計了用于單兵巡飛彈微弱彈道環境感知系統。
1 弱彈道環境感知系統設計
單兵巡飛彈藥彈道環境感知系統由環境感知模塊和高可靠存儲模塊組成。
1.1 環境感知模塊設計
智能感知發射環境模塊用來感知彈道力學環境。本模塊由兩支MEMS加速度傳感器組成,采樣周期為200 Hz,芯片尺寸為5 mm×3 mm×1 mm,用于可靠感知發射階段加速度過載。圖1為環境感知模塊電路設計。

圖1 環境感知模塊電路Fig.1 Environment sensing module circuit
1.2 高可靠存儲模塊設計
針對單兵巡飛彈的彈道飛行環境,設計了具有高可靠性的環境過載存儲系統,以防止發生飛行過程中數據丟失等問題。高可靠存儲模塊控制電路如圖2所示,采用高可靠非易失性存儲芯片實現彈道數據存儲,芯片尺寸為5 mm×5 mm×2.5 mm。
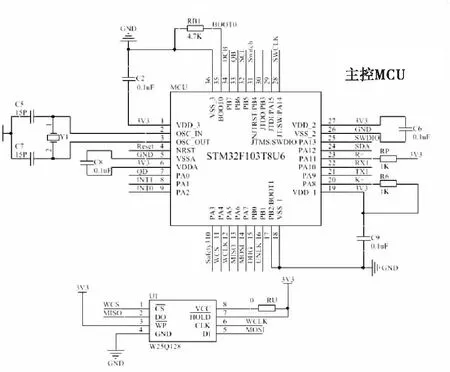
圖2 高可靠存儲模塊電路Fig.2 Highly reliable memory module circuit
2 無信息交互下弱環境感知試驗
無信息交互即彈載計算機和引戰系統無持續相互通信(詢問狀態和反饋狀態),僅測試感知系統對微弱環境力的感知精度和感知、存儲可靠性。
2.1 離心過載試驗
地面過載測試系統搭建在離心環境下,以模擬單兵巡飛彈的整個彈道環境。為了完整地模擬飛控系統的工作狀態,設計了模擬飛控上位機平臺,主要功能包括:系統上電后發送狀態自檢指令、獲取當前狀態、實時存儲和輸出離心過載。
地面全系統模擬試驗平臺試驗系統組成為:測試樣機、模擬主控、離心試驗控制平臺(如圖3所示)、離心試驗系統(如圖4所示)。
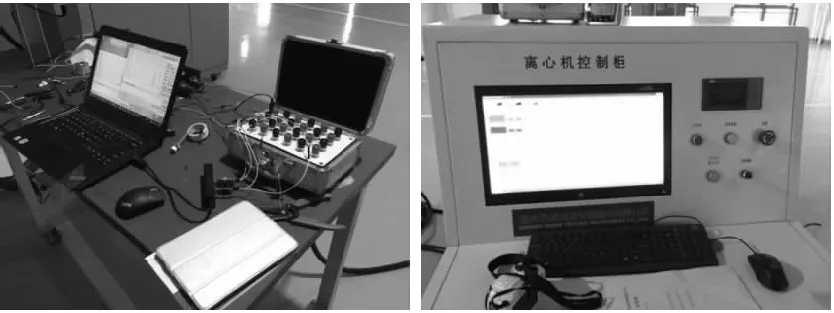
圖3 離心試驗控制平臺Fig.3 Centrifugal test control platform
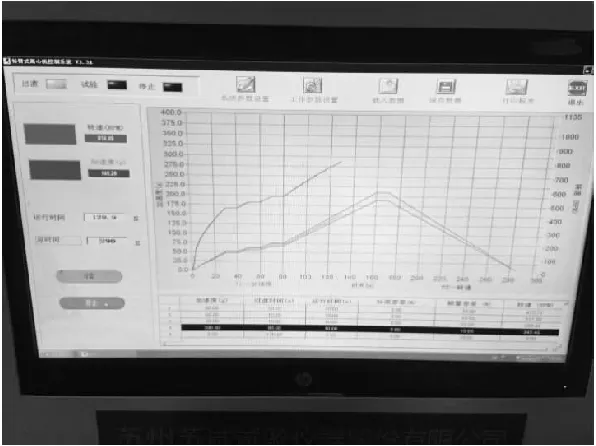
圖4 離心試驗系統Fig.4 Centrifugal test system
試驗流程如下:
1) 系統上電,離心測試控制端向測試系統發送采集過載信息指令,測試系統向控制端反饋接收到指令狀態,并標記相應標志位;
2) 離心試驗設置,設置離心加速度為50~180g,梯度為10g,每個梯度持續時間10 s;
3) 離心旋轉開始,高可靠非易失性存儲芯片響應過載信息存儲指令,并實時存儲離心過載信息,測試系統通過串口通信方式將實時感知的過載信息輸出到離心試驗控制平臺。
控制端通過通信接口將接收到的過載信息實時打印,測試得到:系統控制端接收到的離心過載值與時間關系如圖5(a)所示;高可靠非易失性存儲芯片采集的離心過載值與時間關系如圖5(b)所示。
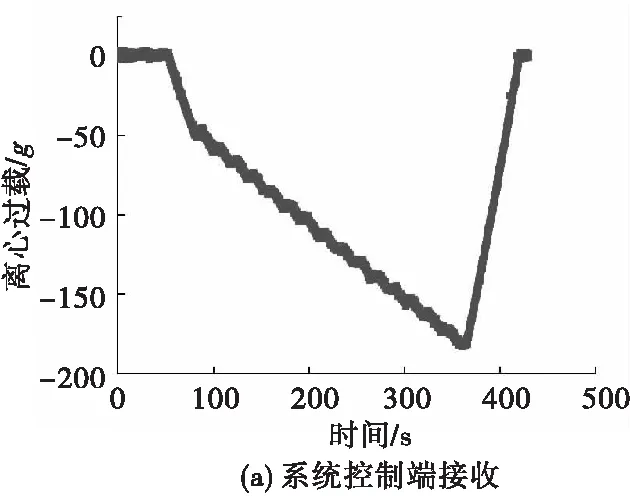
圖5 離心過載隨時間變化Fig.5 Centrifugal overload vs. time
由圖5可以得到,系統控制端接收的加速度信息與高可靠非易失性存儲芯片存儲的信息保持一致,測試時間為425 s,兩路信號采集樣本303 571個,測試點加速度幅值誤差最高為0.3%,每一級離心過載階梯過載值和持續時間完整,控制端接收的離心過載數據和非易失性存儲芯片存儲的離心過載數據與離心機提供的過載信息吻合,證明了所設計的微小型弱彈道環境感知系統的精確性及存儲過載信息的可靠性。
2.2 沖擊-離心過載試驗
為滿足高動態環境下,弱環境感知系統的生存可靠性及數據準確性,開展了沖擊-離心過載試驗。
沖擊試驗裝置如圖6所示,利用馬歇特錘對測試樣機進行沖擊試驗,對感知系統施加的沖擊過載如圖7所示。
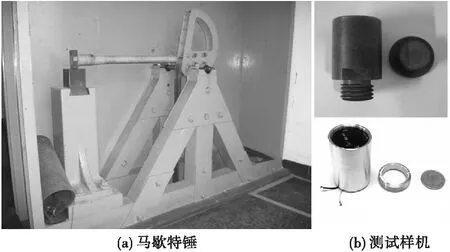
圖6 沖擊試驗裝置Fig.6 Shock test device
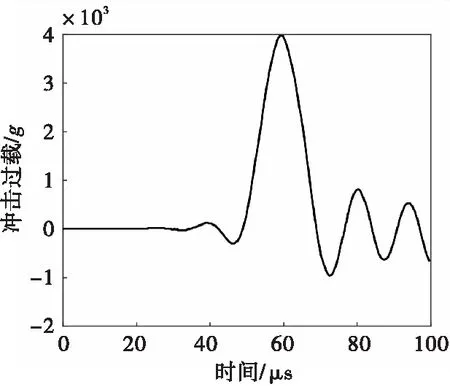
圖7 馬歇特錘沖擊過載Fig.7 Shock overload of the Machete hammer
由圖7可知,感知系統經歷了峰值達4 000g,持續時間為20 μs的沖擊過載。將經歷高沖擊過載試驗后的感知系統再次進行離心過載試驗,并同時通過控制端實時接收和高可靠非易失性芯片存儲兩種方式進行感知微弱環境力變化,得到經歷了高沖擊后的離心過載數據,如圖8所示。從圖8可以得到,系統控制端接收的加速度信息相比高可靠非易失性芯片存儲的信息有微小時間滯后,這是由于軟件的邏輯,在感知到離心過載后,先進行存儲進高可靠非易失性芯片,再進行串口通信傳輸到系統控制端,導致了一定時間的滯后,但忽略時間的滯后,感知得到的離心過載信息是高度一致的,并且與離心機提供的過載信息吻合,說明所設計的弱彈道環境感知系統,在經歷高動態環境的沖擊后,仍具有感知的高精度和感知、存儲的高可靠性。
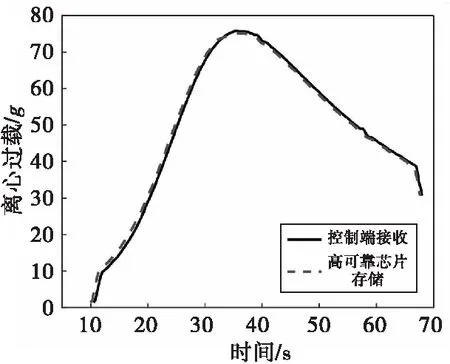
圖8 沖擊后離心過載測試Fig.8 Centrifugal overload test after shock
3 高度信息交互下弱環境感知測試
在實際高智能的單兵巡飛彈中,彈載計算機時刻都在向引戰系統發送自檢指令,引戰系統收到自檢指令后,也必須立即向彈載計算機反饋自身的狀態。即引戰系統的MCU每隔一段時間就會處理通信,而無法正常感知并存儲彈道環境,并且存儲進芯片的過程也是一個耗時的過程,在實際發射過載只有十多毫秒的時間窗里,很容易丟失環境信息,以至于無法完成引戰系統的解除保險。
在通信無法改變的情況下,為了獲得更多的環境信息,將感知就存儲的邏輯變為感知、暫存MCU到統一存儲,在這樣的邏輯下,正常感知過載間隔為1 ms左右,能夠滿足在發射短時間窗里連續感知到發射過載閾值才能確定自身環境的需求。
在裝無人機載制導彈藥進行聯合測試試驗前,利用模擬上位機以25 Hz的頻率一直向MCU發送詢問指令,MCU接到指令后立即向模擬上位機進行狀態反饋,在此高度信息交互的狀態下,進行連續敲擊試驗。 圖9為不同方位連續敲擊(敲擊5次)試驗后,讀取高可靠非易失性芯片中存儲的三軸過載信息。從圖9(a)中可以看到,在X軸方向,有4個波峰,但還有最后一個波峰(約在4 365 ms處)并不明顯;從圖9(b)和圖9(c)中可以明顯看到敲擊連續5次敲擊得到的5個過載波峰。可以看得,每次敲擊峰值持續的時間為1.186 ms,是能夠可靠地感知并存儲到瞬態的沖擊過載。
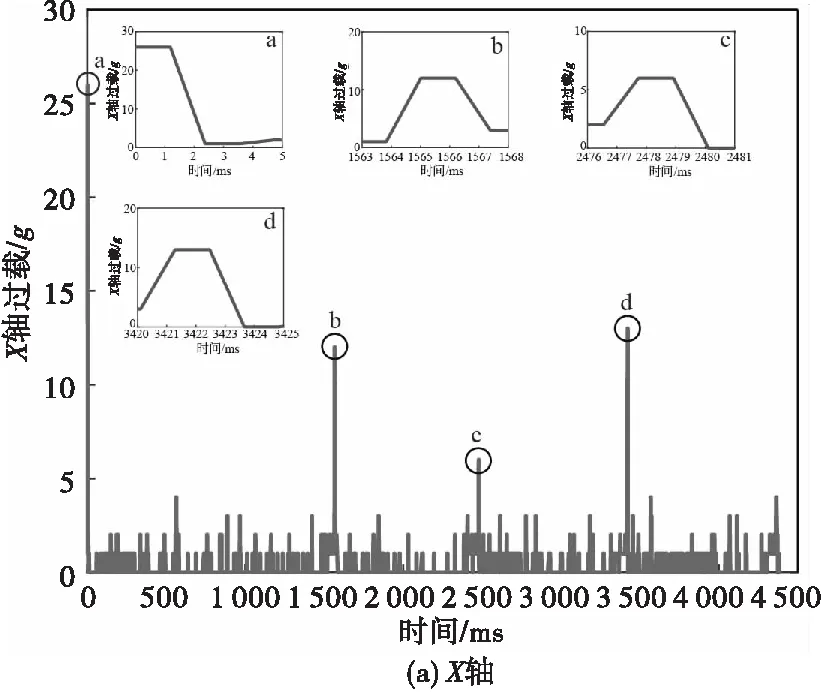
圖9 連續敲擊測試三軸過載Fig.9 Continuous tapping test for triaxial overload
將弱彈道環境感知系統搭載到單兵巡飛彈進行聯合試驗,無人機載彈藥的飛控計算機以25 Hz的頻率向感知系統的MCU連續發送狀態自檢指令。記錄開始的閾值設置為80g,即感知到的過載信息從80g后開始被MCU記錄,并在記錄結束后,統一發送到可靠非易失性芯片中存儲。
發射飛行試驗結束,所得到的發射三軸發射過載曲線如圖10所示。
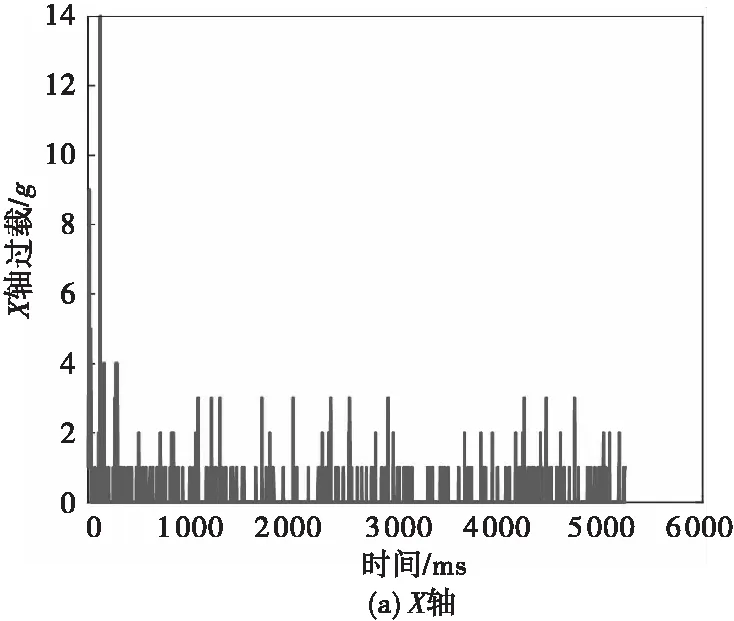
圖10 發射測試三軸過載Fig.10 Launch test triaxial overload
從圖10(a)和圖10(b)中看到,發射過程中,單兵巡飛彈有一定的振動;從圖10(c)可以看到,系統感知到了相對其他兩軸更大的過載信號,所以Z軸為無人機載彈藥彈軸方向,在開始記錄后,過載在11.38 ms達到MEMS加速度芯片感知過載的閾值(200g),在11.38 ms到22.06 ms時都達到或超過了200g的過載,共感知并存儲到了10次最大過載信息。從達到80g閾值開始存儲,到發射過載降至50g,共感知并存儲到了24個數據點(中間4~10 ms為一次通信中斷)。說明所設計的微弱彈道環境感知系統在高度信息交互的環境下準確且可靠地感知并存儲了微弱環境過載信息,并且適用于多次連續判斷是否達到解除保險閾值過載,提高了引戰系統的安全可靠性。
4 結論
本文設計了用于單兵巡飛彈的微小型、高精度、高可靠的弱彈道環境感知系統,并進行了試驗驗證。該系統中采用MEMS加速度傳感器和高可靠非易失性存儲芯片實現微弱彈道環境的實時精確感知和實時可靠存儲。在無信息交互下,利用高速離心機進行了地面功能模擬試驗,利用馬歇特錘使整個系統經歷高動態高過載沖擊后,再次離心測試,驗證了感知系統準確性及可靠性。最后與單兵巡飛彈聯合進行了高度信息交互下的發射飛行測試,驗證了感知系統在高智能的巡飛彈藥中,能夠準確和可靠的感知過載,可以使單兵巡飛彈多次連續地判斷是否達到解除保險閾值過載,提高了引戰系統的安全可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
