基于自適應(yīng)模糊PID的導(dǎo)彈控制系統(tǒng)
2021-02-18 11:17:28王小東周春桂王志軍王利鋒張凱奇
探測(cè)與控制學(xué)報(bào) 2021年6期
王小東,周春桂,王志軍,王利鋒,張凱奇
(1.中北大學(xué)機(jī)電工程學(xué)院,山西 太原 030051;2.湖南云箭集團(tuán)有限公司,湖南 長(zhǎng)沙 410100)
0 引言
現(xiàn)代武器家族中,導(dǎo)彈的地位十分重要。為保證導(dǎo)彈穩(wěn)定飛行,對(duì)目標(biāo)對(duì)象進(jìn)行實(shí)時(shí)跟蹤,發(fā)出正確的修正偏差指令,操縱導(dǎo)彈改變飛行姿態(tài),對(duì)導(dǎo)彈控制系統(tǒng)的研究極其重要。文獻(xiàn)[1—2]指出智能控制是當(dāng)前運(yùn)用的最多的控制方法,非常適用于導(dǎo)彈這類非線性的控制系統(tǒng)。文獻(xiàn)[3]提出一種PID參數(shù)優(yōu)化的方法,通過優(yōu)化參數(shù)提高導(dǎo)彈控制精度,但相比于智能控制,該方法控制效果不是很理想。文獻(xiàn)[4]以常量定義了誤差和誤差變化率,驗(yàn)證了模糊控制理論可以應(yīng)用于飛航導(dǎo)彈自動(dòng)控制中,相比于傳統(tǒng)PID控制,模糊控制有著更好的控制效果,但是還無法達(dá)到自適應(yīng)的效果。本文針對(duì)此問題,將傳統(tǒng)PID與模糊控制結(jié)合,提出基于自適應(yīng)模糊PID的導(dǎo)彈控制系統(tǒng)。
1 導(dǎo)彈控制系統(tǒng)結(jié)構(gòu)及自適應(yīng)模糊PID控制算法
1.1 導(dǎo)彈控制系統(tǒng)結(jié)構(gòu)
導(dǎo)彈控制系統(tǒng)是導(dǎo)彈上自動(dòng)穩(wěn)定和控制導(dǎo)彈繞質(zhì)心運(yùn)動(dòng)的整套裝置。它的功能是保證導(dǎo)彈穩(wěn)定飛行,并根據(jù)制導(dǎo)指令控制導(dǎo)彈飛向目標(biāo)。其控制系統(tǒng)主要由控制器、舵伺服機(jī)構(gòu)、彈體等組成,如圖1所示。導(dǎo)彈控制的任務(wù)就是克服導(dǎo)彈飛行中的各種干擾,實(shí)時(shí)準(zhǔn)確地控制導(dǎo)彈姿態(tài),使導(dǎo)彈自動(dòng)按預(yù)定軌道飛行,因此,導(dǎo)彈控制精度的好壞是導(dǎo)彈飛行成敗的關(guān)鍵。

圖1 導(dǎo)彈控制系統(tǒng)結(jié)構(gòu)框圖Fig.1 Block diagram ofMissile control system structure
控制器是整個(gè)導(dǎo)彈控制系統(tǒng)的核心部件,控制器的好壞直接影響導(dǎo)彈控制的精度。由于使用傳統(tǒng)PID很難保證有較好的控制精度,然而傳統(tǒng)PID又具有較好的魯棒性和靜態(tài)性能,因此將模糊控制與傳統(tǒng)PID相結(jié)合可達(dá)到自適應(yīng)的效果,更好地滿足系統(tǒng)要求的性能指標(biāo)。
1.2 自適應(yīng)模糊PID控制算法
作為智能控制技術(shù)的重要組成部分,模糊控制已得到廣泛的應(yīng)用,并且控制效果明顯優(yōu)于傳統(tǒng)PID控制[5-6]。模糊控制器由模糊化過程、知識(shí)庫、推理決策、精確化計(jì)算四部分組成,其控制原理框圖如圖2所示。
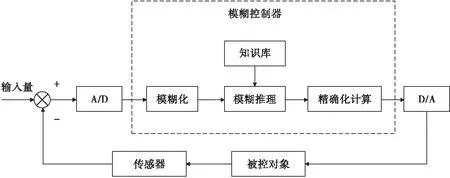
圖2 模糊控制原理圖Fig.2 Block diagram of fuzzy control
自適應(yīng)模糊PID算法根據(jù)系統(tǒng)所反饋的誤差信息,進(jìn)行在線辨識(shí)和修正,可以實(shí)現(xiàn)模糊控制規(guī)則的自學(xué)習(xí)并且能在線調(diào)整控制器的參數(shù),以便適應(yīng)外界條件或環(huán)境因素的干擾,大大提高系統(tǒng)的控制精度和抗干擾能力,更好滿足控制系統(tǒng)所要求的性能標(biāo)準(zhǔn)[7]。
通常以誤差E及誤差變化率EC作為輸入,首先將輸入量進(jìn)行模糊化,得到相應(yīng)的模糊集合。根據(jù)被控對(duì)象的控制要求設(shè)置語言變量和隸屬度函數(shù)。1975年扎德(Zadeh)做出了語言變量的定義,用一個(gè)五元體來進(jìn)行表征,即:[X,T(X),U,G,M]。其中X為語言變量名稱,U為論域,T(X)表示語言變量值名稱的集合,G為語法規(guī)則,M為語義規(guī)則,用來選取隸屬度函數(shù)[8]。 模糊推理規(guī)則作為模糊控制最核心的部分,通常是一系列的IF…THEN(如果…則)模糊規(guī)則的集合,是由專家總結(jié)出來的一組模糊條件語句經(jīng)驗(yàn)和操作技能。常見的方法有扎德(Zadeh)法,馬丹尼(Mamdani)法。精確化計(jì)算是將推理出的模糊子集轉(zhuǎn)換成對(duì)應(yīng)的精確值,常使用的方法一般有重心法、加權(quán)平均法和最大隸屬度法等。
在系統(tǒng)的運(yùn)行過程中根據(jù)誤差E以及誤差變化率EC所反饋的數(shù)據(jù)與模糊關(guān)系進(jìn)行在線對(duì)比,不斷調(diào)節(jié)控制器參數(shù),改善控制器的性能,使得控制效果達(dá)到更佳的狀態(tài)。
2 基于自適應(yīng)模糊PID的導(dǎo)彈控制系統(tǒng)
本文提出的自適應(yīng)模糊PID導(dǎo)彈控制系統(tǒng)的設(shè)計(jì)關(guān)鍵要素包括:確定模糊論域、確定模糊子集和隸屬度函數(shù)、制定控制規(guī)則、選擇合適的模糊推理方法和清晰化方法,最后經(jīng)過清晰化計(jì)算得到實(shí)際輸出量。將模糊控制和PID控制相結(jié)合,以解決使用傳統(tǒng)PID控制時(shí)造成導(dǎo)彈控制精度不高的問題。
1) 確定模糊論域。以誤差E以及誤差變化率EC作為輸入,以比例、積分、微分的變化量(ΔKp,ΔKi,ΔKd)作為輸出,輸入量誤差和誤差變化率的論域?yàn)?-6,-4,-2,0,2,4,6),輸出量ΔKp,ΔKi,ΔKd的論域?yàn)?-3,-2,-1,0,1,2,3)。
2) 確定模糊子集和各變量隸屬度函數(shù)。將輸入輸出變量都平均劃分為7個(gè)等級(jí):NB、NM、NS、Z0、PS、PM、PB(負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大),隸屬度函數(shù)選擇對(duì)稱的三角形隸屬度函數(shù)。
3) 制定模糊控制規(guī)則。控制器的模糊推理采取IF…THEN模糊規(guī)則的Mamdani法推理。在制定模糊控制規(guī)則時(shí)應(yīng)遵循以下原則:
當(dāng)|E|較大時(shí),應(yīng)選取較大的ΔKp和較小的ΔKd;當(dāng)|E|不太大時(shí),為了使系統(tǒng)具有較小的超調(diào),ΔKp應(yīng)取較小些,ΔKd對(duì)系統(tǒng)影響較大,應(yīng)取較小些;當(dāng)|E|較小時(shí),ΔKp和ΔKi應(yīng)取得大些。控制規(guī)則如表1—表3所示。
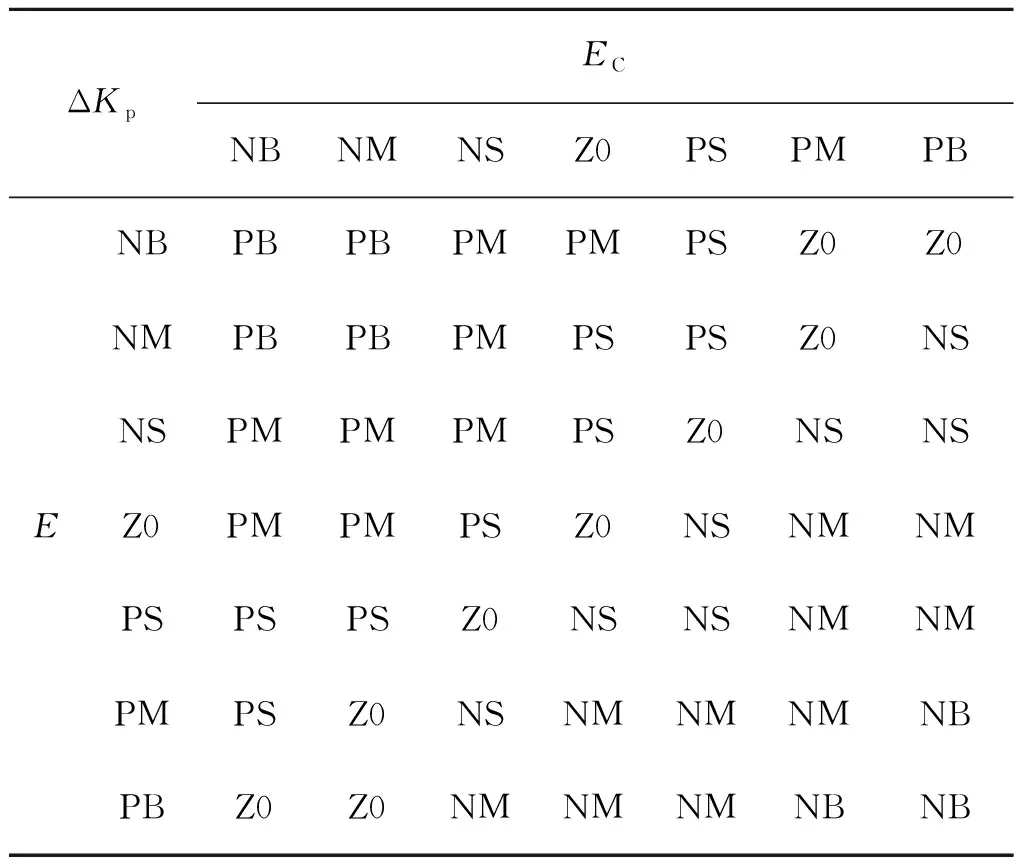
表1 ΔKp模糊控制規(guī)則Tab.1 ΔKp fuzzy control rules

表2 ΔKi模糊控制規(guī)則Tab.2 ΔKi fuzzy control rules
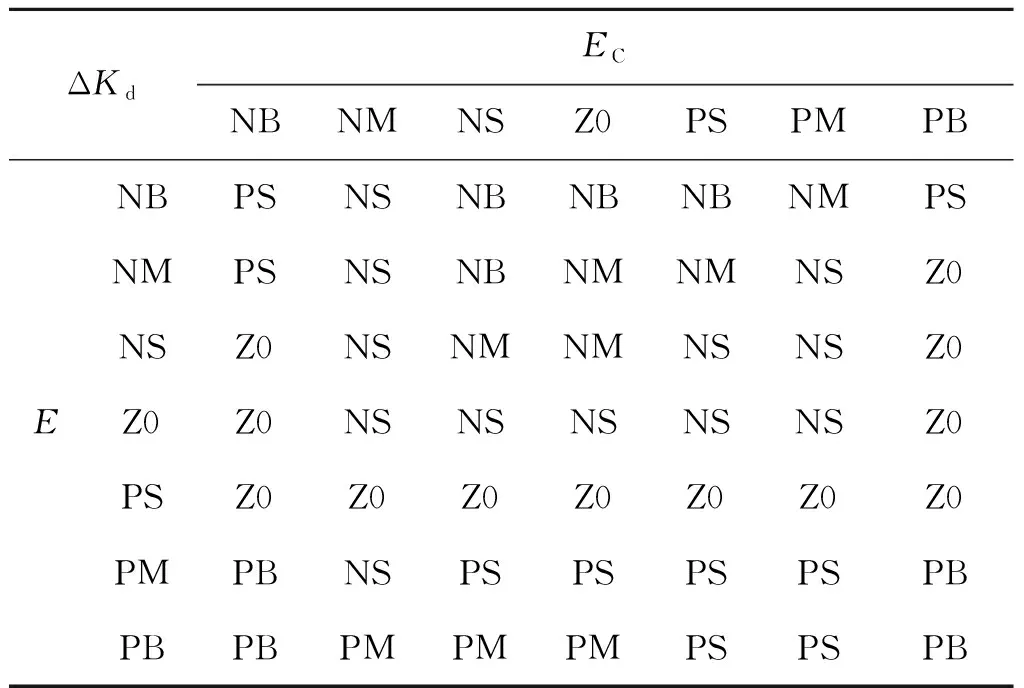
表3 ΔKd模糊控制規(guī)則Tab.3 ΔKd fuzzy control rules
4) 精確化計(jì)算。為了獲得準(zhǔn)確的控制量,就要求模糊方法能夠很好地表達(dá)輸出隸屬度函數(shù)的計(jì)算結(jié)果。無論是最大隸屬度法還是加權(quán)平均法,都是只考慮了模糊集合的一個(gè)點(diǎn),而重心法能考慮到多個(gè)點(diǎn)的值,結(jié)果更加可靠,因此本文采用該方法進(jìn)行精確化計(jì)算。
自適應(yīng)模糊PID導(dǎo)彈控制系統(tǒng)是以誤差E及誤差變化率EC作為輸入,以比例、積分、微分的變化量(ΔKp,ΔKi,ΔKd)作為輸出。根據(jù)模糊規(guī)則,經(jīng)過模糊推理和重心法清晰化,計(jì)算出PID控制器的三個(gè)變化量ΔKp、ΔKi、ΔKd來實(shí)現(xiàn)PID參數(shù)的在線調(diào)整,經(jīng)過調(diào)整之后的PID 參數(shù)可以表示如下:
(1)
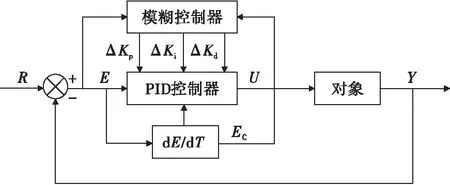
圖3 自適應(yīng)模糊PID控制結(jié)構(gòu)框圖Fig.3 Block diagram of adaptive fuzzy PID structure
3 系統(tǒng)仿真
3.1 彈體模型
根據(jù)文獻(xiàn)[9—10]可以得到彈體傳遞函數(shù)如下:
(2)
式(2)中,第一個(gè)式子為俯仰通道彈體傳遞函數(shù)。其中KM是彈體傳遞系數(shù),T1D是彈體動(dòng)力時(shí)間系數(shù),TD是彈體時(shí)間常數(shù),ξD是彈體阻尼系數(shù)。本文將以文獻(xiàn)[11]中某型導(dǎo)彈的俯仰通道為例進(jìn)行數(shù)值仿真。
3.2 建立Simulink模型
1) 經(jīng)典PID的Simulink模型
依據(jù)自動(dòng)控制理論,在Simulink中依次放置輸入信號(hào),比例、微分、積分模塊,傳遞函數(shù)模塊,將各模塊依次相連,加入示波器來觀察響應(yīng)曲線。在Simulink中搭建傳統(tǒng)PID的模型如圖4所示。
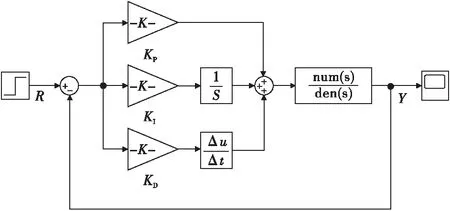
圖4 PID控制系統(tǒng)模型Fig.4 PID control system model
2) 自適應(yīng)模糊PID的Simulink模型


圖5 自適應(yīng)模糊PID控制模型Fig.5 Adaptive fuzzy PID control model control structure
3.3 仿真分析
為突出自適應(yīng)模糊PID控制系統(tǒng)的優(yōu)勢(shì),輸入信號(hào)分別為單位階躍信號(hào)和正弦信號(hào),為驗(yàn)證其抗干擾性,在系統(tǒng)的輸入端加入作用時(shí)間為0.5 s和1 s的脈沖信號(hào)作為干擾信號(hào),比較分析了在不同輸入條件下,系統(tǒng)在無控、經(jīng)典PID控制以及自適應(yīng)模糊PID三種狀態(tài)的時(shí)間響應(yīng)結(jié)果。
1) 正弦信號(hào)輸入作用下系統(tǒng)的響應(yīng)分析
圖6為正弦激勵(lì)響應(yīng)曲線,可以看出,三種狀態(tài)均無超調(diào),但自適應(yīng)模糊PID相比于傳統(tǒng)PID和無控狀態(tài),上升時(shí)間更快,達(dá)到穩(wěn)態(tài)時(shí)間也更快。

圖6 三種狀態(tài)下的正弦激勵(lì)響應(yīng)曲線Fig.6 The response curves under the excitation of sin
圖7加入了作用時(shí)間為0.5 s的脈沖信號(hào)作為干擾。無控狀態(tài)的超調(diào)量超過20%,上升時(shí)間是三者中最慢的;傳統(tǒng)PID控制的上升時(shí)間縮短,但超調(diào)量明顯增加,達(dá)到了40%,且震蕩明顯;自適應(yīng)模糊PID的超調(diào)量不到20%,小于其余二者,且上升時(shí)間為三者中最快,不到0.5 s,達(dá)到穩(wěn)態(tài)的時(shí)間也最短,控制效果明顯強(qiáng)于其余二者。
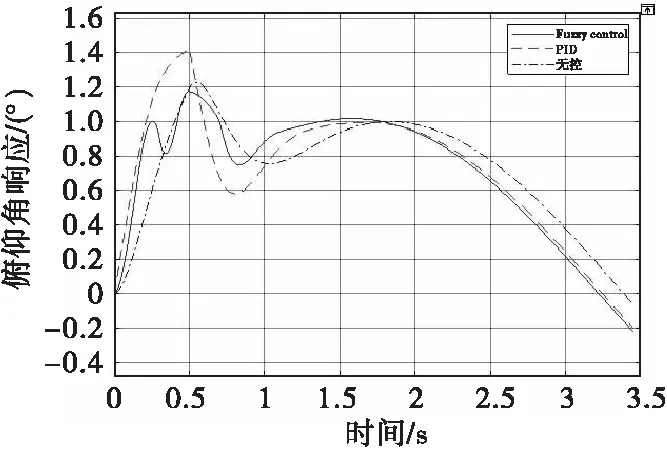
圖7 加入0.5 s脈沖信號(hào)的三者響應(yīng)曲線Fig.7 The response curves under the excitation of sin and 0.5 s pulse signal
圖8是加入作用時(shí)間為1 s的脈沖信號(hào)得到的三者響應(yīng)曲線,傳統(tǒng)PID控制的上升時(shí)間和達(dá)到穩(wěn)態(tài)的時(shí)間都比無控狀態(tài)快,但超調(diào)量卻增加且波動(dòng)范圍較大;自適應(yīng)模糊PID上升時(shí)間和達(dá)到穩(wěn)態(tài)時(shí)間是三者中最短,無超調(diào),波動(dòng)范圍最小。
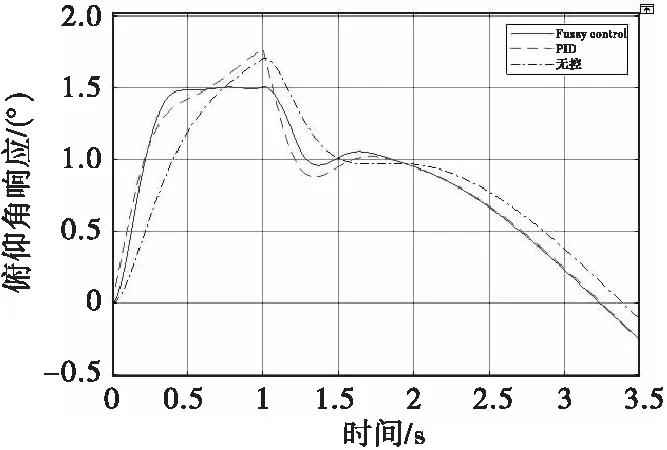
圖8 加入1 s脈沖信號(hào)的三者響應(yīng)曲線Fig.8 The response curves under the excitation of sin and 1 s pulse signal
2) 單位階躍信號(hào)輸入作用下系統(tǒng)的響應(yīng)分析
圖9為階躍激勵(lì)響應(yīng)曲線,無控狀態(tài)的超調(diào)量很小,僅有3%,但是上升時(shí)間最長(zhǎng);傳統(tǒng)PID的上升時(shí)間加快但同時(shí)超調(diào)量也增加到了7%;自適應(yīng)模糊PID不僅調(diào)節(jié)時(shí)間加快且沒有超調(diào)量,控制效果是三者中最好的。
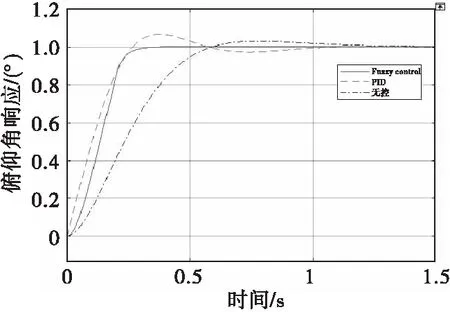
圖9 三種狀態(tài)下的階躍激勵(lì)響應(yīng)曲線Fig.9 The response curves under the excitation of step
圖10增加了0.5 s的脈沖信號(hào),無控狀態(tài)未達(dá)到期望值,上升時(shí)間和達(dá)到穩(wěn)態(tài)時(shí)間均為三者最長(zhǎng);傳統(tǒng)PID的上升時(shí)間和達(dá)到穩(wěn)態(tài)的時(shí)間縮短,但超調(diào)量達(dá)到了20%;自適應(yīng)模糊PID上升時(shí)間僅有0.2 s且無超調(diào),波動(dòng)范圍小,達(dá)到穩(wěn)態(tài)時(shí)間也最快,控制效果最理想。

圖10 加入0.5 s脈沖信號(hào)的三者響應(yīng)曲線Fig.10 The response curves under the excitation of step and 0.5 s pulse signal
圖11將脈沖信號(hào)的作用時(shí)間增加到1 s。無控狀態(tài)超調(diào)量很小為2%,上升時(shí)間太慢,超過0.5 s;傳統(tǒng)PID的上升時(shí)間和達(dá)到穩(wěn)態(tài)時(shí)間都比無控狀態(tài)短,但超調(diào)量達(dá)到了4%;自適應(yīng)模糊PID的曲線上升時(shí)間快、無超調(diào)、達(dá)到穩(wěn)態(tài)時(shí)間不到0.3 s,為三者最快,控制效果最好。
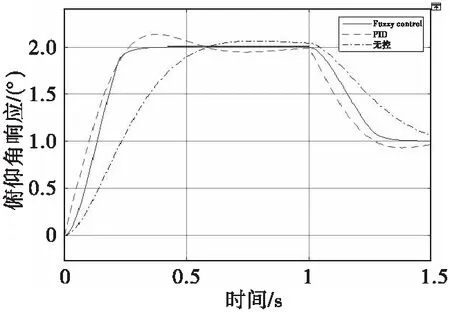
圖11 加入1 s脈沖信號(hào)的三者響應(yīng)曲線Fig.11 The response curves under the excitation of step and 1 s pulse signal
通過數(shù)值仿真結(jié)果可以看出,不論輸入信號(hào)是正弦信號(hào)還是單位階躍信號(hào),干擾信號(hào)作用的時(shí)間無論長(zhǎng)或短,相比較于無控狀態(tài)和傳統(tǒng)PID,自適應(yīng)模糊PID的控制效果更加精準(zhǔn)、穩(wěn)定。
4 結(jié)論
本文提出基于自適應(yīng)模糊PID的導(dǎo)彈控制系統(tǒng)。該系統(tǒng)能對(duì)PID的三個(gè)參數(shù)進(jìn)行在線調(diào)整,根據(jù)被控對(duì)象的不同,計(jì)算出最優(yōu)的參數(shù)供控制系統(tǒng)使用,從而更好地對(duì)非線性時(shí)變系統(tǒng)進(jìn)行控制。數(shù)值仿真結(jié)果表明該控制系統(tǒng)具有響應(yīng)時(shí)間快,上升時(shí)間短,超調(diào)量小,穩(wěn)定性高的特點(diǎn)。在當(dāng)前要求越來越高的導(dǎo)彈控制系統(tǒng)中有很高的工程應(yīng)用價(jià)值。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
中國(guó)科技信息(2016年14期)2016-07-31 21:16:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
