洋流對海底鉆機著底偏移影響分析
2021-02-19 04:01:48李蘭香金永平劉德順萬步炎
海洋工程裝備與技術 2021年1期
李蘭香,金永平,劉德順,萬步炎
(湖南科技大學海洋礦產資源探采裝備與安全技術國家地方聯合工程實驗室,湘潭 411201)
0 引 言
海底鉆機是進行海洋資源勘探與海底工程地質勘察的相當重要的技術裝備[1-2]。海底鉆機在著底偏移過程中會受到洋流、波浪等復雜的海洋環境的影響,導致著底的位置發生偏移,這對于海洋資源的勘探和開采會造成嚴重的影響。目前大多對于海上起吊作業的研究主要是在海面以上,通過對船體、起重機、吊物系統進行動力學建模,分析其波浪以及海風等海面因素對其動態特性的影響規律[3-5]。金永平等[6]在隨機不規則波浪激勵下建立海底鉆機收放系統動力學系統,分析海底鉆機在不同水深和海況條件下鉆機的擺動情況,得出鉆機著底過程的擺動角。與此同時,相關學者對拖曳系統中的拖纜的幾何形態進行分析研究,如章浩燕等[7]考慮纜繩自身的受力情況以及海洋環境的作用,給出拖纜的二維幾何形態解析法,得出拖纜內部張力的大小與水深之間的關系。但在研究過程中將流體作用力視為定值,沒有考慮到洋流大小的變化以及方向的變化等實際海洋作業情況的影響。同時還有一些學者在考慮到海洋環境的復雜影響下,利用水動力分析軟件OrcaFlex對海洋資源開采工具下放的情況進行分析研究[7],分析其工具在下放過程中由于其海洋環境所造成的偏移影響[8-11]。
為了深入了解海底鉆機在不同洋流情況下的著底偏移變化,本文基于二維力學模型和水動力分析軟件OrcaFlex,分別對海底鉆機在洋流方向與洋流速度2種變化下的不同情況進行仿真分析。對比分析海底鉆機在不同的洋流方向與洋流流速的變化下,力學模型以及軟件仿真的著底偏移情況。
在對海底鉆機著底偏移進行分析之前,做出以下幾點假設:
(1)海底鉆機和臍帶纜處于同一垂直面,忽略臍帶纜的扭轉運動。
(2)洋流質點的運動是無旋的勢流運動。
(3)在分析著底偏移的過程時只考慮二維平面內的運動。
1 海底鉆機著底偏移力學分析與OrcaFlex仿真建模
1.1 力學平衡方程
在海底鉆機著底的過程中,將海底鉆機視為臍帶纜的末端。在鉆機與臍帶纜的接觸點處取一節點i,di趨近于0,此節點處的張力Ti沿著臍帶纜的切線方向,設該節點處的切線方向與平面內x方向的夾角為θ,該節點的受力包括節點的張力、洋流作用力、節點的自身重力以及節點的浮力。其中洋流阻力、節點的自身重力以及節點的浮力屬于外力,在單位長度范圍內所受外力可以分為x軸方向分量Fx和z軸方向分量Fz。通過節點的外力與節點的張力可以達到平衡,其平衡方程[7]為

1.1.1 洋流作用力
在海洋中,洋流的方向和流速不是一成不變的,洋流方向受多方面影響,其洋流速度會隨著海洋的深度不斷加深而逐漸減小。對于細長柱體或柔性圓柱狀結構物,其上所受流體作用可以通過Morison公式[12]進行計算,由海底鉆機著底運動示意圖(見圖1)可知,海底鉆機與洋流流速的夾角為θ,洋流的方向為φ,則流體作用力可以分解成法向方向和切向方向2個受力[7],即
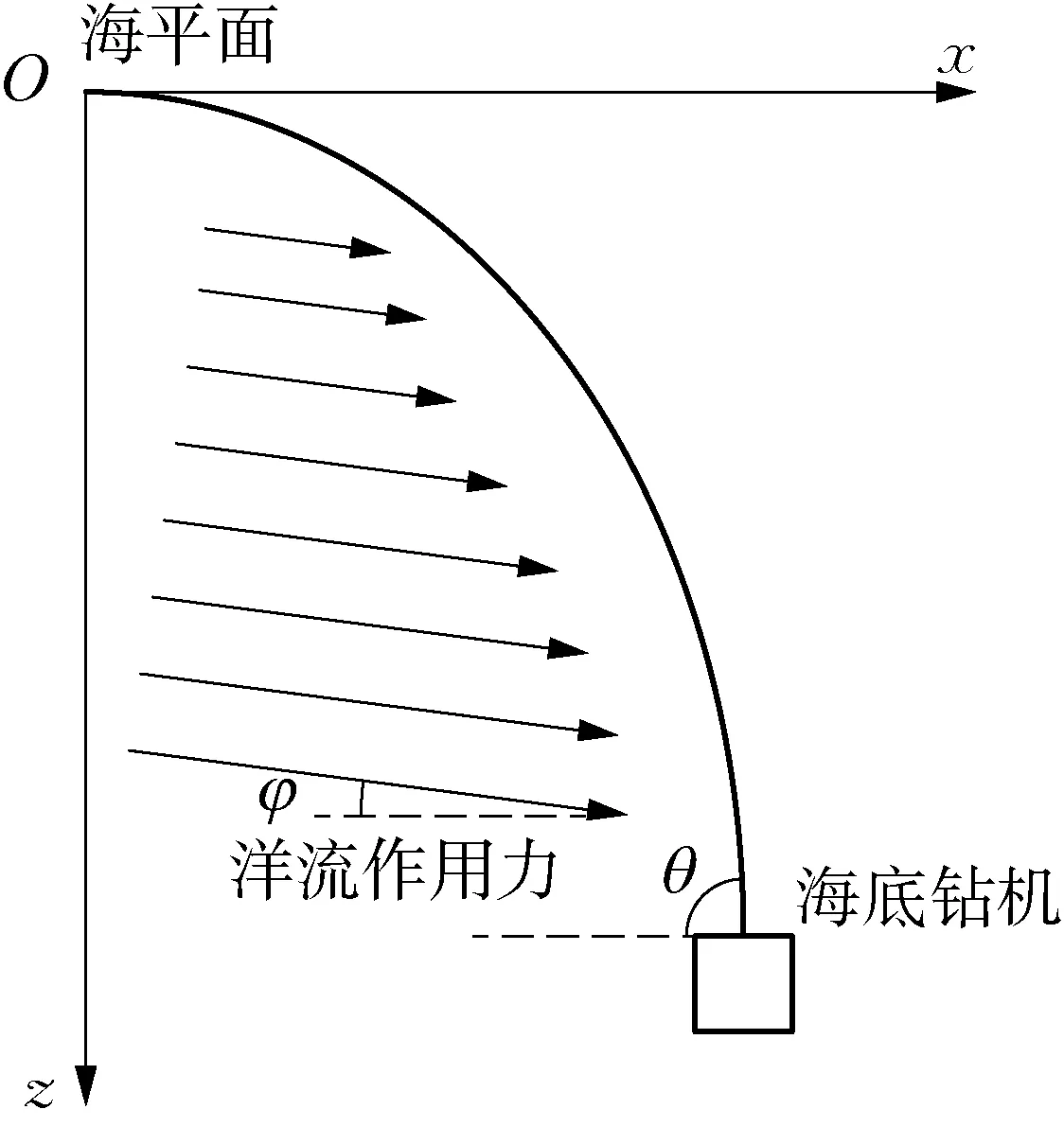
圖1 海底鉆機著底運動示意圖Fig.1 Schematic diagram of the bottom movement of a seafloor drilling rig
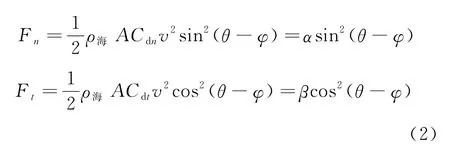
式中:Cdn、Cdt分別為法向阻力系數和切向阻力系數;A為節點i的橫截面積;v為洋流速度;α、β為變量。
1.1.2 節點水中重力

式中:B為節點在水中的重力;g為重力加速度;γ為常數。
1.1.3 平衡方程求解
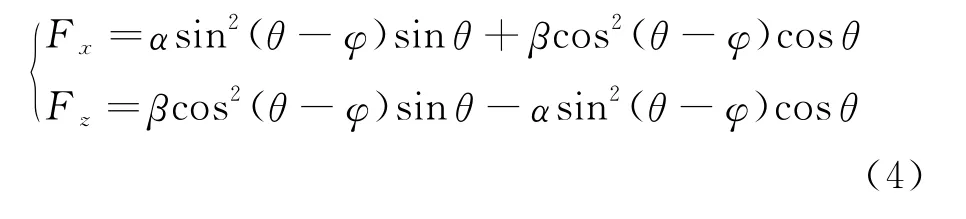
將洋流作用力在x軸和z軸方向上各自分解[7],得
由于節點切向方向的摩擦系數可以忽略不計,即β=0。
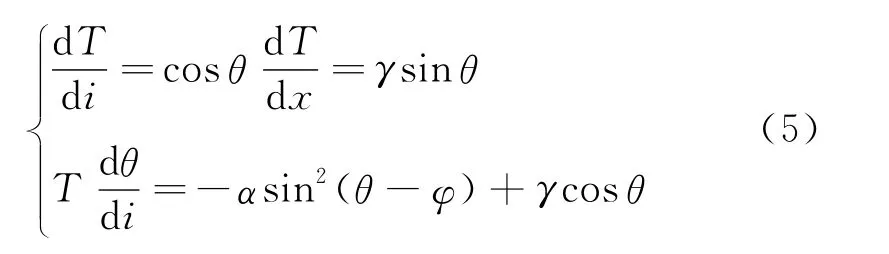
根據平衡方程式(1),將式(3)、式(4)代入其中,進行方程式簡化,得[7]

式中:T0表示鉆機未入水時節點i的張力。式(6)表示節點張力的大小與海底鉆機著底的深度存在線性關系。
由式(5)可得[7]

令λ=γ/α,代入式(7),得

對式(8)進行積分求解[7],得

將式(6)代入式(9),整理可得[7]
由式(10)可知,cosθ是關于z的變化的函數,故令

1.2 OrcaFlex仿真建模
采用OrcaFlex軟件對海底鉆機著底偏移過程進行仿真建模。其工具船、絞車、臍帶纜等在軟件中有相應的簡化模型,根據具體情況設定相關數據,在OrcaFlex的軟件中,根據“海大號”船體的相關數據,選擇軟件中接近的船體模型,并在船體上添加絞車模型,根據實際海底鉆機收放系統中的絞車數值,設置絞車的高度。臍帶纜用一般纜繩模型,根據鎧裝臍帶纜的參數,設置纜繩的直徑為0.032 m,選取其安全工作載荷為195 kN,最大破斷力為630 kN。海底鉆機忽略其自由度相關因素,將其簡化成一個方體。對其采用6D Buoy模型建模,其長、寬、高的數值根據“海牛Ⅱ號”的實際數值進行模擬設置。高度設置為6.5 m,寬度和長度設置為6 m。其質量設置為12 t,水中質量為10 t。圖2所示為海底鉆機著底系統3D仿真模型。
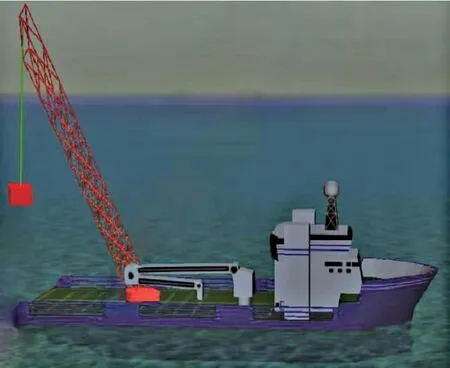
圖2 海底鉆機著底系統3D仿真模型Fig.2 3D simulation model of the bottoming system of a seafloor drill rig
2 海底鉆機著底偏移仿真結果及分析
本文以“海牛號”海底鉆機為對象進行著底過程分析,根據各類環境的影響,海底鉆機在著底過程中的偏移量是一直在變化的,當海底鉆機完成著底時,偏移量達到最大值。本文主要研究洋流方向以及洋流流速的大小對著底偏移的影響。根據式(1)~式(12),建立海底鉆機著底偏移力學模型,在MATLAB中根據洋流、波浪以及海況等參數利用龍格-庫塔法對數據進行仿真分析。并利用水動力分析軟件OrcaFlex對海底鉆機著底偏移的過程進行仿真模擬,并分析其洋流方向與洋流流速對其的影響。由于OrcaFlex軟件對海洋環境的模擬比較全面,所以在仿真過程中將作業母船在x方向的前進速度設為0,波浪的浪向角選擇為45°,海況選取4級(和風),有義波高為0.88 m。將海底鉆機的模型簡化成柱體。洋流的方向角φ選取0°、30°、45°、90°。洋流流速從4個時期進行分析,洋流參數如表1所示。

表1 洋流參數[13]Tab.1 Parameters of ocean current
2.1 洋流方向對海底鉆機著底偏移的影響
圖3所示為不同洋流方向角的情況下海底鉆機在著底過程中隨著著底深度的增加在x方向所產生的偏移的變化。其中,圖3(a)為不同洋流方向下力學模型的仿真曲線圖,圖3(b)為OrcaFlex軟件在不同洋流方向下對海底鉆機著底偏移的仿真曲線圖。

圖3 不同洋流方向角的仿真曲線Fig.3 Simulation curves of different ocean current direction angles
表2所示結果表明,在保證其他海洋環境不變的情況下,洋流的方向對于海底鉆機的著底偏移產生的影響比較明顯,當洋流方向角為90°時,鉆機著底的偏移量為1.59 m左右,隨著洋流方向角的減小,其海底鉆機的偏移量逐漸增大,當方向角為0°時,海底鉆機的偏移量達到最大,其大小為67.98 m。從圖3(b)仿真結果可以看出,海底鉆機的著底偏移量隨洋流方向角的變化趨勢與圖3(a)基本一致。并通過表2的數據分析可以得出力學模型的仿真結果與水動力分析軟件的仿真結果比較接近,其誤差比較小,尤其是在洋流方向為45°時,其誤差大小為1.6%。因此其力學模型對于不同洋流方向的分析是可靠的。

表2 不同洋流方向下海底鉆機偏移結果Tab.2 Offsets of a seafloor drilling rig in different ocean current directions
2.2 洋流流速對海底鉆機著底偏移的影響
圖4所示為不同洋流流速的情況下海底鉆機在著底過程中隨著著底深度的增加在x方向所產生的偏移的變化。其中,圖4(a)所示為不同洋流流速下力學模型的仿真曲線,圖4(b)所示為OrcaFlex軟件在不同洋流流速下對海底鉆機著底偏移的仿真曲線。
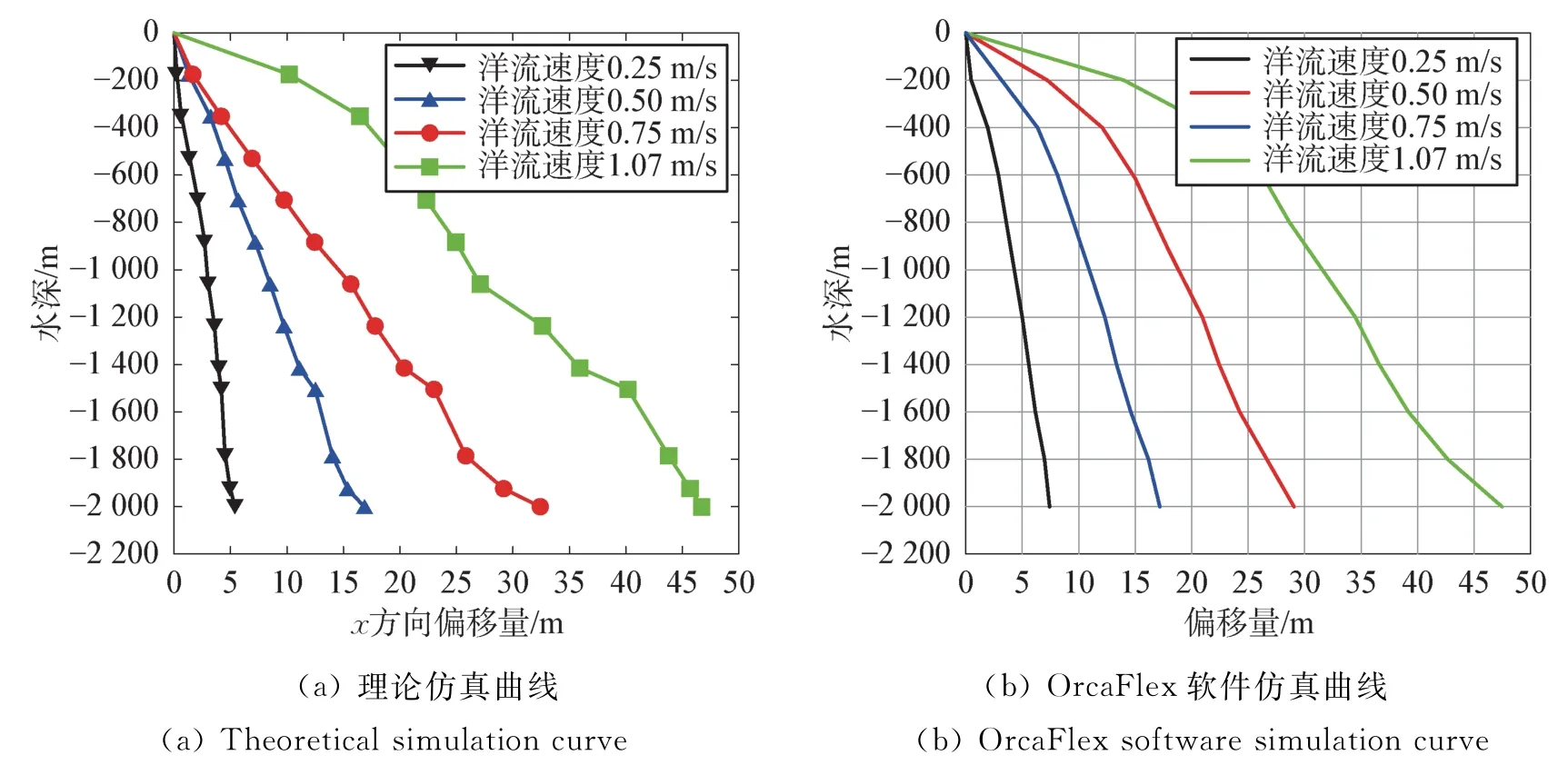
圖4 不同洋流流速的仿真曲線Fig.4 Simulation curves of different ocean current velocities
由圖4(a)所示結果可以看出,在保證其他海洋環境不變的情況下,洋流流速的大小對于海底鉆機的著底偏移產生的影響相對比較明顯,當洋流的流速為0.25 m/s時,海底鉆機的著底偏移量大約為5.56 m,隨著洋流速度的增大,海底鉆機著底的偏移量越來越大,當洋流速度為1.07 m/s時,海底鉆機的偏移量大約為46.93 m。圖4(b)所示是在OrcaFlex中對海底鉆機著底運動過程的模擬仿真結果分析,從圖4(b)中可以看出,海底鉆機的著底偏移量隨洋流流速大小的變化趨勢與圖4(a)基本一致。并通過表3的數據分析可以得出力學模型的仿真結果與水動力分析軟件的仿真結果比較接近,但由于一些其他因素的影響,例如當洋流速度為0.25 m/s和0.75 m/s時,力學模型的仿真結果和水動力分析軟件的分析結果誤差相對比較大,但從整體的仿真結果分析可以看出其力學模型還是存在參考性的,對于海底鉆機著底作業具有指導意義。
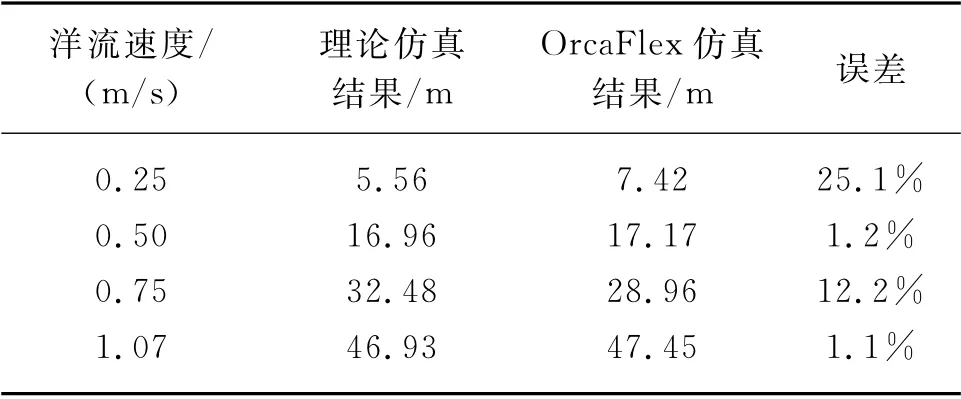
表3 不同洋流速度下海底鉆機偏移結果Tab.3 Offsets of seafloor drill at different ocean current velocities
3 結 語
以深海海底鉆機為研究對象,對海底鉆機著底運動過程進行二維形態分析,采用Morison公式建立鉆機著底偏移的力學模型。研究不同的洋流方向角與不同洋流流速對海底鉆機著底偏移的影響,得到以下結論:
(1)通過對力學模型的仿真計算得到不同洋流方向角與洋流流速對鉆機著底偏移結果的影響仿真結果,將其與OrcaFlex軟件中的仿真結果進行比較,發現鉆機著底偏移結果基本一致。因此在實際海洋環境中可以利用OrcaFlex軟件對海底鉆機著底進行計算與分析。
(2)在保證其他海洋環境不變的情況下,當洋流方向角為90°時,即洋流方向垂直于臍帶纜與鉆機時,鉆機著底偏移量最小,為1.59 m。當洋流流速為0.25 m/s時,鉆機著底偏移量大約是5.56 m。因此,在對海底鉆機進行著底工作時,最好讓海底鉆機的工具船垂直于洋流方向,同時在洋流流速較小的情況下進行操作。
(3)根據力學模型可以得出,在海底鉆機著底過程中,在選取的二維海洋環境中,海洋環境因素對臍帶纜所受到的張力幾乎不產生影響。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
