基于模糊RBF神經(jīng)網(wǎng)絡算法的灌溉控制系統(tǒng)設計
2021-02-22 11:35:30張麗娜魯旭濤
計算機測量與控制 2021年1期
關鍵詞:規(guī)則
張麗娜,魯旭濤 ,劉 昊 ,李 靜
(1.中北大學 信息與通信工程學院,太原 030051;2.中北大學 電氣與控制工程學院,太原 030051)
0 引言
我國是一個農業(yè)大國,農田占地面積大,水資源作為生命的源泉,關系到農業(yè)的發(fā)展,影響著人民的溫飽問題。根據(jù)最新數(shù)據(jù)統(tǒng)計顯示,2020年我國的耕地面積可達到18.65億畝,長期保護農田面積達到15.46億畝,高標準的農田面積至少要有8億畝并逐步發(fā)展為10億畝。“十二五”期間,我國的灌溉技術不斷發(fā)展,農田灌溉面積不斷擴大,經(jīng)過改善后新增加了7500萬畝灌溉面積。我國實施了大量的節(jié)水政策,已經(jīng)取得較大成效,灌溉面積增加了1.2億畝,當今農業(yè)發(fā)展的關鍵是必須要有效落實耕地和灌溉用水措施,對同作物進行合理化的管理。
因此,徐景輝等人提出了基于SOA算法實現(xiàn)了PID參數(shù)的自動優(yōu)化[1]。王磊提出了枚舉法和遺傳算法在農田灌溉管道系統(tǒng)優(yōu)化設計[2]。安慶杰等人提出了基于改進粒子群算法的兩級渠道水資源優(yōu)化配置。Alonso Campos提出了基于并行多目標遺傳算法的灌溉調度實時能量優(yōu)化。Mohammad Ali Asgharzadeh提出了基于HADIS算法的灌溉調用系統(tǒng)。上述灌溉方法無法根據(jù)需水量得出灌溉時間,對此本文提出一種基于RBF神經(jīng)網(wǎng)絡模糊控制的灌溉決策系統(tǒng),以山西省忻州地區(qū)種植的玉米利合328號為例,進行研究,相比傳統(tǒng)灌溉方式增加了產量。
1 作物需水特性
為了保證灌溉的高效性和科學性,就了解作物的需水特性,農作物需水量是在作物不受嚴重的病蟲毒害,正常的土壤狀況下的生長需水量。影響作物需水特性的條件主要分三大部分:氣象條件,土壤條件,作物自身的特性等。
1.1 氣象條件
氣象條件主要是氣溫、風速大小、氣壓大小、空氣濕度等。這些因素會影響作物的蒸騰作用,風速會影響空氣的溫濕度大小,進而改變作物的蒸騰量。氣溫越高,空氣的水分越少,蒸騰作用越強。

表1 部分氣象數(shù)據(jù)表
1.2 土壤條件
土壤條件主要是土壤的種類、土壤的結構、土壤的吸水性、地下水等。不同的土壤類型和土壤結構會影響土壤滲透率,影響土壤的吸水性,進而影響作物的吸水性。地下水量的大小會影響土壤的溫濕度。地下水位較高的地方可以適當?shù)臏p少灌溉量。
1.3 作物特性
作物特性主要是作物的吸水特性、作物生長的不同時期的需水量等。不同種類的作物、不同品種的作物以及不同生長周期的作物對水分的需求量不同。耐寒的作物需水量小,濕生的作物需水量相對較大。幼苗時期需水量大,成熟時期需水量小。
1.4 作物需水量計算
本文中控制的農田面積為1畝,預測的農作物種類是內蒙古地區(qū)種植的玉米利合328號,該作物畝保苗5 500~6 000株,行距55 cm,株距20.2 cm為最佳生長環(huán)境。在進行算法控制前,需要先根據(jù)氣象條件計算神經(jīng)網(wǎng)絡要預測的數(shù)據(jù),即利合玉米的需水量,再對RBF神經(jīng)網(wǎng)絡進行訓練。本文利用參考作物蒸發(fā)量的大小來計算出作物需水量。
Q實=KCQ參
(1)
式(1)中,Q實指實際生長過程中作物的需水量;KC指作物系數(shù);Q參指參考作物需水量。

(2)
式(2)中,Rn指參考作物冠層表面接收的凈輻射;G土壤熱通量;γ指濕度計常數(shù);u2指離地面2 m高處的風速;es指飽和水氣壓;ea指當?shù)氐膶嶋H水氣壓;Δ指平均氣溫時飽和水氣壓與溫度曲線斜率。
參考2019年7月和8月50天的數(shù)據(jù),計算出每日作物的需水量大小,部分氣象數(shù)據(jù)如表1所示,計算結果如圖1所示。
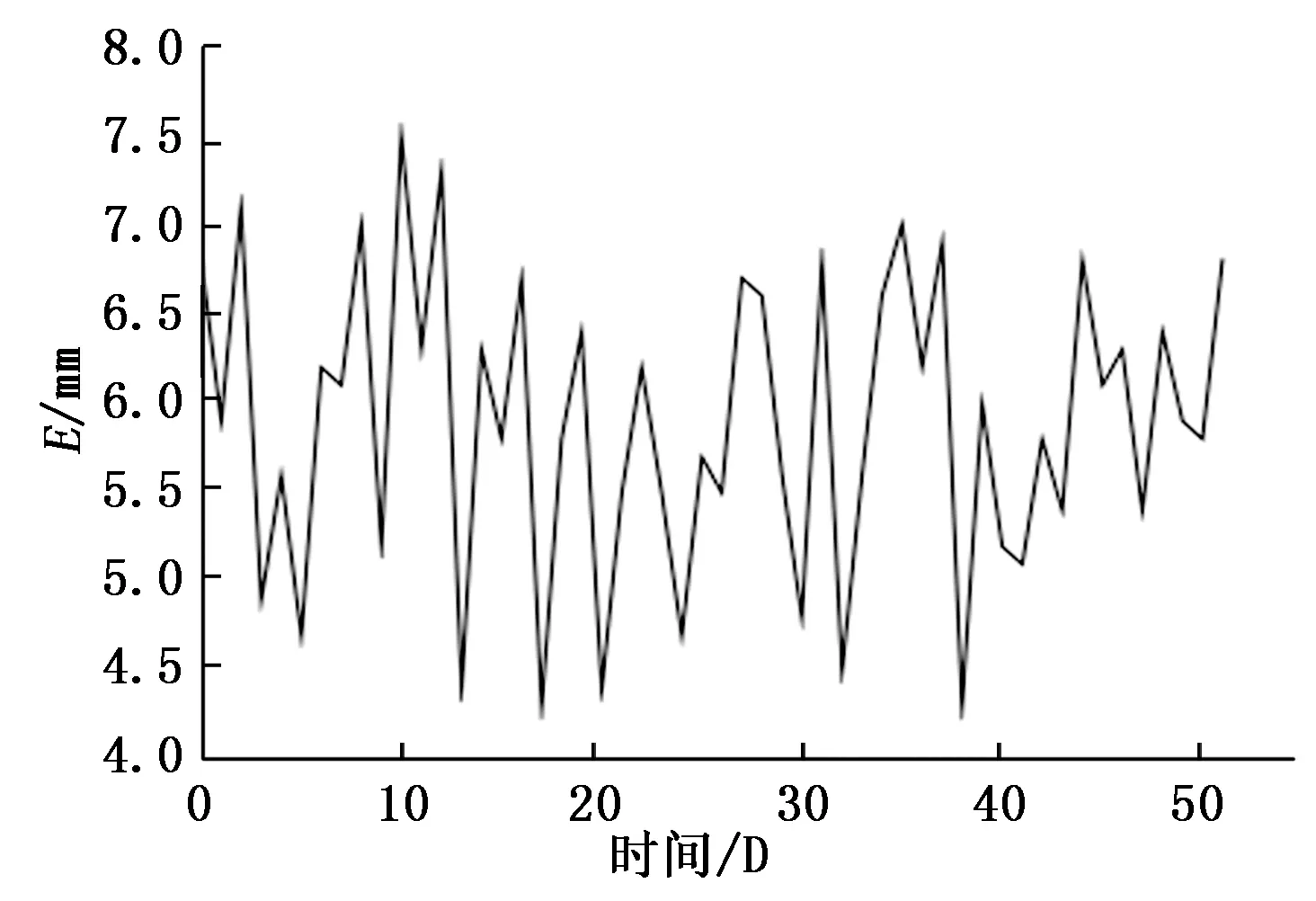
圖1 作物需水量計算結果
2 模糊RBF網(wǎng)絡
模糊系統(tǒng)與模糊神經(jīng)網(wǎng)絡二者互相聯(lián)系又互相獨立,模糊系統(tǒng)實現(xiàn)的結果就是模糊神經(jīng)網(wǎng)絡,但是模糊神經(jīng)網(wǎng)絡有自己的特性。將模糊系統(tǒng)和神經(jīng)網(wǎng)絡結合起來可以構成模糊神經(jīng)網(wǎng)絡,將RBF網(wǎng)絡與模糊系統(tǒng)結合起來可以構成模糊RBF網(wǎng)絡。
2.1 網(wǎng)絡結構
模糊RBF神經(jīng)網(wǎng)絡結構有四層,分別為:輸入層、模糊化層、模糊推理層和輸出層構成。具體的網(wǎng)絡結構如圖2所示。
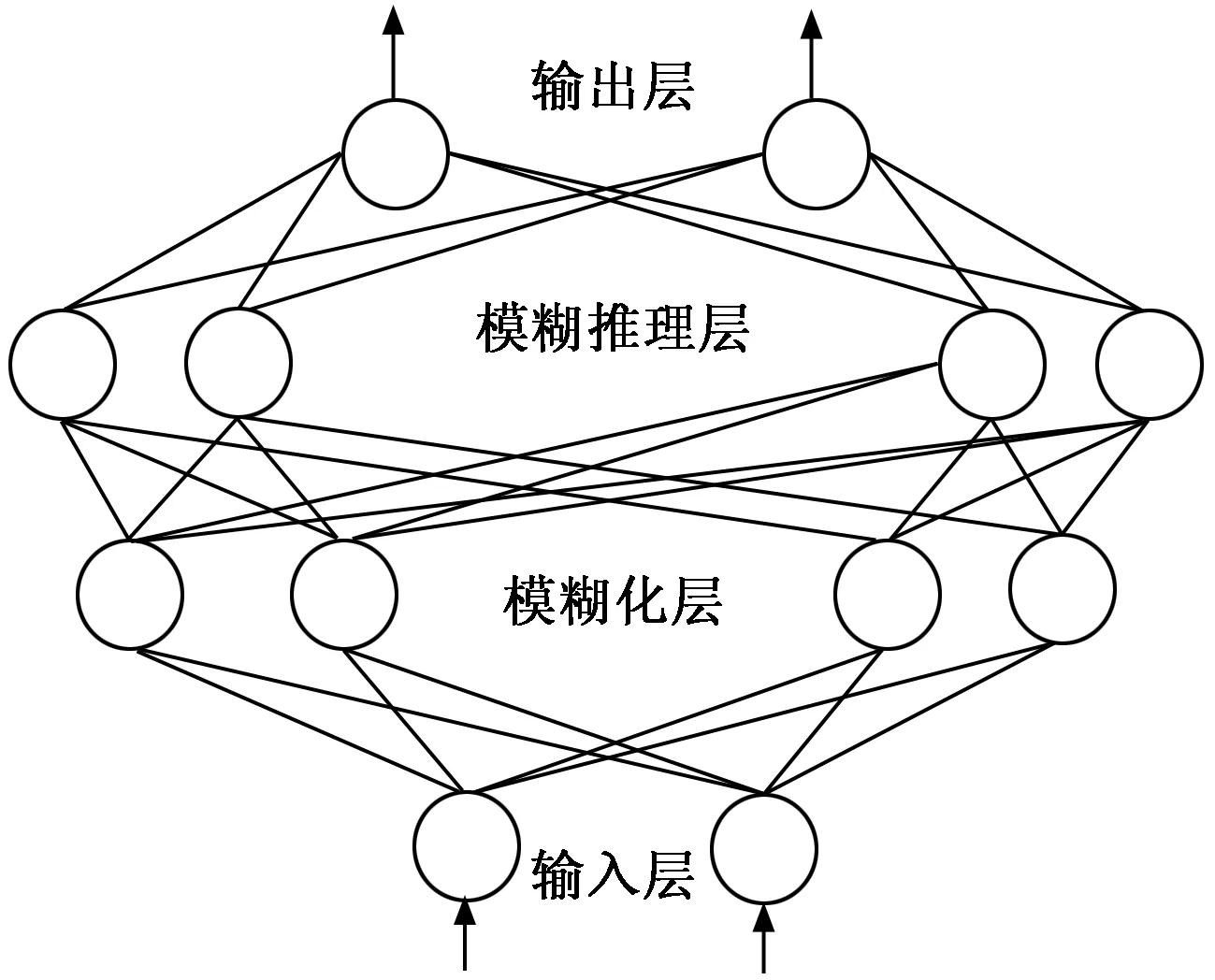
圖2 模糊RBF神經(jīng)網(wǎng)絡結構
模糊RBF網(wǎng)絡中信號傳播及各層的功能如下。
第一層:輸入層。
輸入層的節(jié)點與輸入的參數(shù)量之間直接建立聯(lián)系,將輸入量傳送到輸入層。傳輸節(jié)點的輸入和輸出之間的關系式為:
f1(i)=xi
(3)
第二層:模糊化層,即隸屬函數(shù)層。
本文用高斯函數(shù)作隸屬函數(shù),在模糊化層中,各個節(jié)點都能進行隸屬函數(shù)計算,在第j個節(jié)點處:
(4)
(5)
其中:cij和bj分別是第i個輸入變量的第j個模糊集合高斯函數(shù)的均值和標準差。
第三層:模糊推理層,即建立規(guī)則層。
該層的各個節(jié)點可以與模糊化層建立連接,通過固定的模糊控制規(guī)則組合在一起,輸出相應的數(shù)據(jù),輸出的數(shù)據(jù)具有一定的強度,其中的節(jié)點j的輸出結果是本節(jié)點全部輸入信號的總乘積,即:
(6)
第四層:輸出層。
各個節(jié)點收到的輸入信號的加權總和即為該節(jié)點的輸出量,即:
(7)
其中:l為輸出層節(jié)點數(shù),W為輸出節(jié)點與第三層各節(jié)點的連接權矩陣。
2.2 逼近算法
采用模糊RBF網(wǎng)絡逼近對象,取網(wǎng)絡結構為輸入層2,模糊化層4,輸出層1,過程如圖3所示。
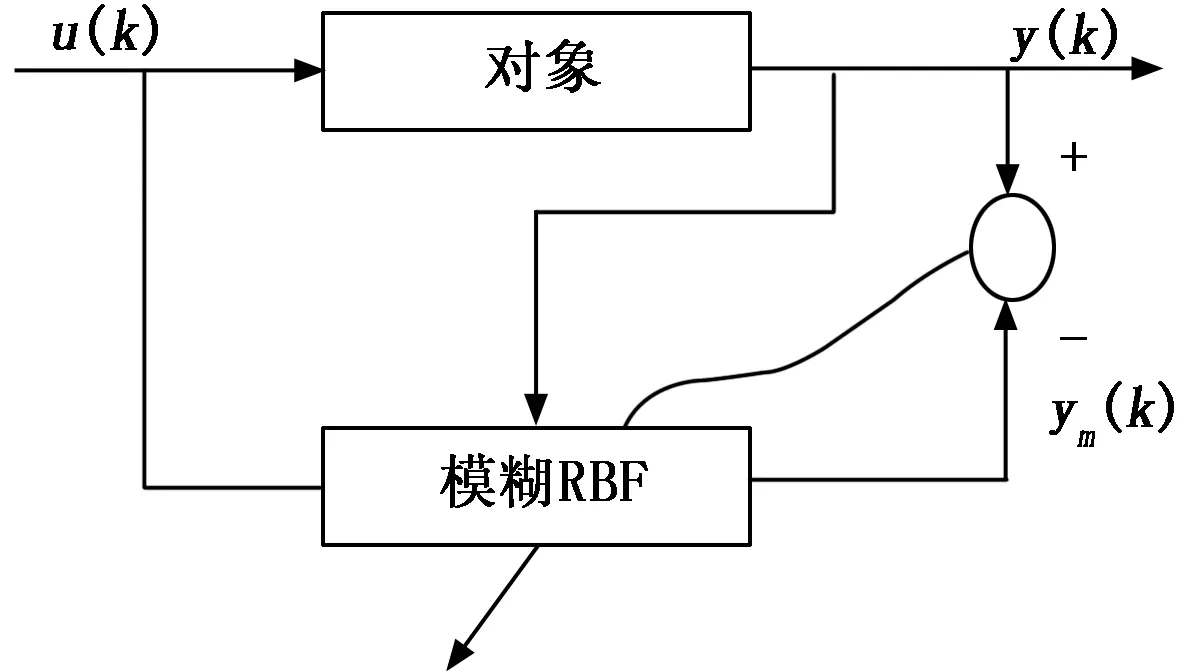
圖3 模糊RBF神經(jīng)網(wǎng)絡逼近
取ym(k)=f4,ym(k)和y(k)分別表示模糊輸出和實際輸出。模糊的輸入為y(k)和u(k),模糊的輸出為ym(k),則模糊的逼近誤差為:
e(k)=y(k)-ym(k)
(8)
定義如下的目標函數(shù),便于調整函數(shù):
(9)
輸出層權值的調節(jié)方式:
(10)
則輸出層的權值學習算法:
w(k)=w(k-1)+Δw(k)+α[w(k-1)-w(k-2)]
(11)
式中,η為學習速率,α為動量因子,η∈[0,1],α∈[0,1]。
隸屬函數(shù)參數(shù)的調整方式:
(12)
(13)
其中:
(14)
隸屬函數(shù)參數(shù)的學習算法:
cij(k)=cij(k-1)+Δcij(k)+α[cij(k-1)-cij(k-2)]
(15)
bj(k)=bj(k-1)+Δbj(k)+α[bj(k-1)-bj(k-2)]
(16)
3 灌溉控制實現(xiàn)
3.1 灌溉控制系統(tǒng)設計
氣象條件、土壤條件以及作物特性會影響到農作物的需水特性,而氣象條件中的光照、溫度高低、濕度狀況以及風速大小對作物的需水量影響較大。為了將農作物的需水量控制在合理高效的范圍內,將這四個參數(shù)作為模糊控制的輸入,而玉米的需水量的大小作為控制的輸出。灌溉策略結構如圖4所示,首先根據(jù)輸入?yún)?shù)計算出作物的需水量,再參考實際的土壤含水量計算出需要灌溉的水量的多少,隨后用模糊控制算法計算出灌溉這一需水量所用的灌溉時間,最后通過控制閥門的狀態(tài)來控制灌溉。
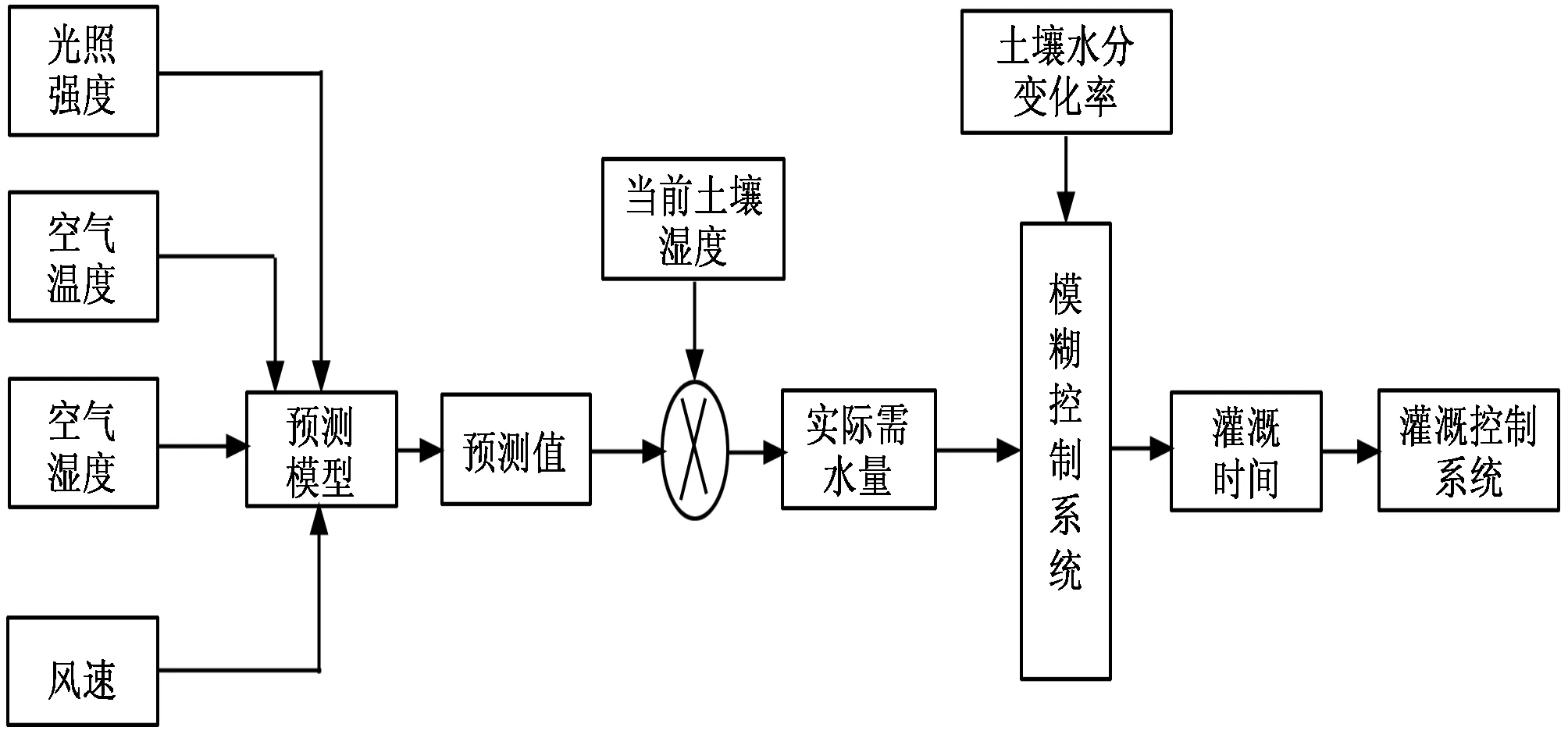
圖4 灌溉結構圖
3.2 模糊RBF神經(jīng)網(wǎng)絡算法
神經(jīng)網(wǎng)絡預測模型設計步驟如下。
3.2.1 樣本預處理
RBF神經(jīng)網(wǎng)絡要求輸入的參數(shù)量可以實時的進行采集,并且對輸出變量的影響較大。輸入的數(shù)據(jù)需要處理成0到1之間的的代表數(shù)據(jù),用來計算權值的大小。具體的預處理計算過程如下:
(17)
式中,x為原樣本;y為預處理后的樣本;xmin,xmax為原樣本中的最小值,最大值;ymin,ymax為樣本范圍。
3.2.2 神經(jīng)網(wǎng)絡節(jié)點個數(shù)確定
RBF神經(jīng)網(wǎng)絡能夠根據(jù)不同的要求和不同的解決方案設計出不同的結構,結構使用過程比較靈活。本文的輸入?yún)?shù)量為光照強度、空氣溫度、空氣濕度以及風速大小4個變量,輸出變量為作物需水量。因此需要確定模糊結構中的模糊化層節(jié)點數(shù)是模糊網(wǎng)絡結構的重要影響因素。用如下公式確定模糊化層節(jié)點個數(shù):

(18)
P指隱含層節(jié)點數(shù)目;n指輸入層節(jié)點數(shù)目;m輸出層節(jié)點數(shù)目;a是1~10 之間的調節(jié)常數(shù)。
對模糊化層節(jié)點個數(shù)進行假設,將4、5、6、7、8五個數(shù)值帶入上式進行訓練計算,訓練時間和絕對均方誤差結果如表2所示。
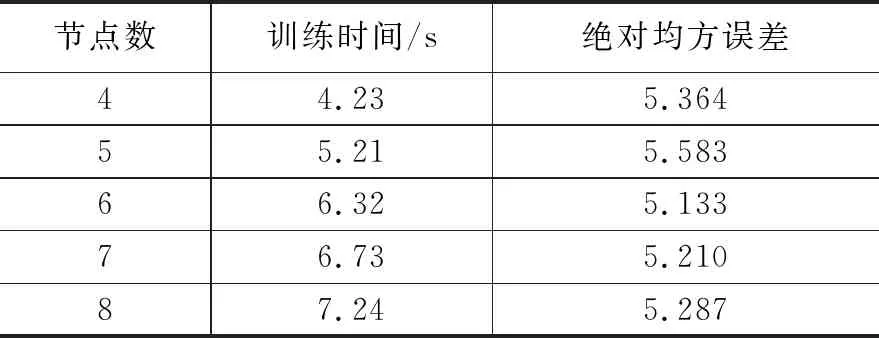
表2 模糊化層節(jié)點個數(shù)對神經(jīng)網(wǎng)絡訓練的影響
根據(jù)計算結果可以得出,當模糊化層的節(jié)點個數(shù)為6時,得出的均方誤差最小,計算結果更為準確。故而建立了一個4-6-6-1的RBF 神經(jīng)網(wǎng)絡基本結構,輸出值就是需要灌溉的水量的預測值。
3.2.3 參數(shù)選擇
為了確保本文的真實可靠性,以內蒙古地區(qū)種植的玉米利合328號為例,適宜在4月25日至5月10日種植在10厘米低溫穩(wěn)定通過10℃大達到七天以上,活動積溫2200℃。環(huán)境建立參數(shù)。
1)初始值和閾值的選擇:
為了方便計算,初始值和閾值一般采用(0,1)之間的隨機數(shù)值。
2)量化因子和比例因子:
在模糊控制器中輸入?yún)?shù)是精確數(shù)值,需要進行模糊處理輸入到模糊規(guī)則中,對應的輸出也是模糊值域,需要處理為精確值進行輸出控制。故而,要引入量化因子和比例因子對其進行轉換控制。
假設輸入量a1的分量e=[-a,a],模糊論域:
U={-n,-n+1,...,0,...n-1,n}。則量化因子定義為:
(19)
解得,量化因子分別為:
比例因子定義為:
(20)
解得,比例因子為:
kT=257 s
3)期望誤差的選擇:
期望誤差設置為10-2。
3.3 模糊控制器設計
本文用到的控制器是被廣泛使用的Mamdani 型模糊推理控制器。為了測量準確,對土壤中的水分采用多個傳感器進行測量,然后取加權平均數(shù)作為最終的參考量。灌溉需水量使用RBF神經(jīng)網(wǎng)絡進行周期性的預測,周期為5分鐘。但是,當最終計算出的灌溉時間小于5分鐘時要等待下一個預測周期,此時需要停止灌溉。
3.3.1 輸入輸出變量論域
本文的控制器的輸入是灌溉需水量和土壤水分的差值Q和土壤的水分變化率E兩個變量。輸出量是實際的灌溉時間T。Q的差值變化范圍為0~20%;E的變化率范圍為-5%~5%;T的時間變化范圍為0~30 min。
3.3.2 模糊語言及其量化論域
模糊控制的規(guī)則根據(jù)不同的輸入輸出的級別來確定,首先將輸入輸出三個變量進行等級定義,然后根據(jù)實際情況排列組合得到模糊控制規(guī)則。本文Q的變化分為八個等級,從0到7;E的變化分為七個等級,從-3到3;T的變化分為八個等級,從0到7。對應的語言如表3所示。
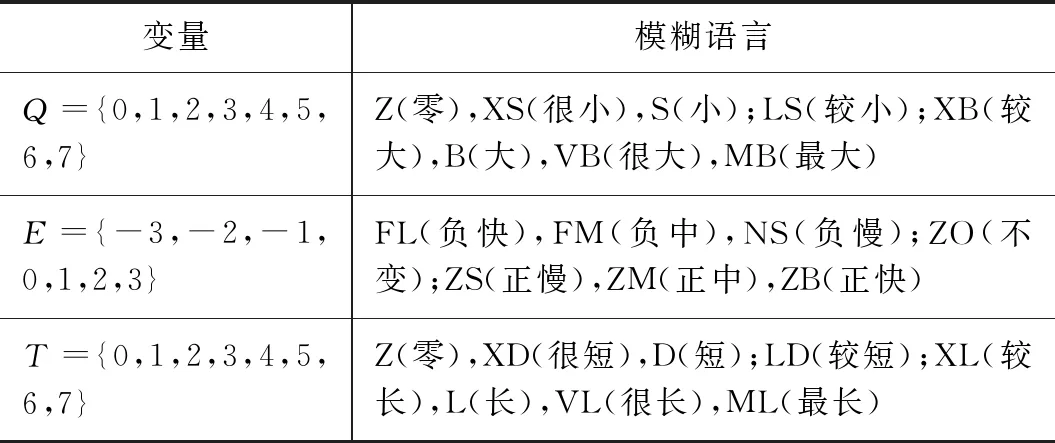
表3 Q、E、T的模糊語言變量
3.3.3 隸屬度函數(shù)
采用三角隸屬函數(shù)將輸入與模糊控制規(guī)則聯(lián)系起來,隸屬函數(shù)的形式會影響灌溉用水的使用效率,進而影響產量。輸入輸出變量的隸屬度函數(shù)結果如圖5~7所示。
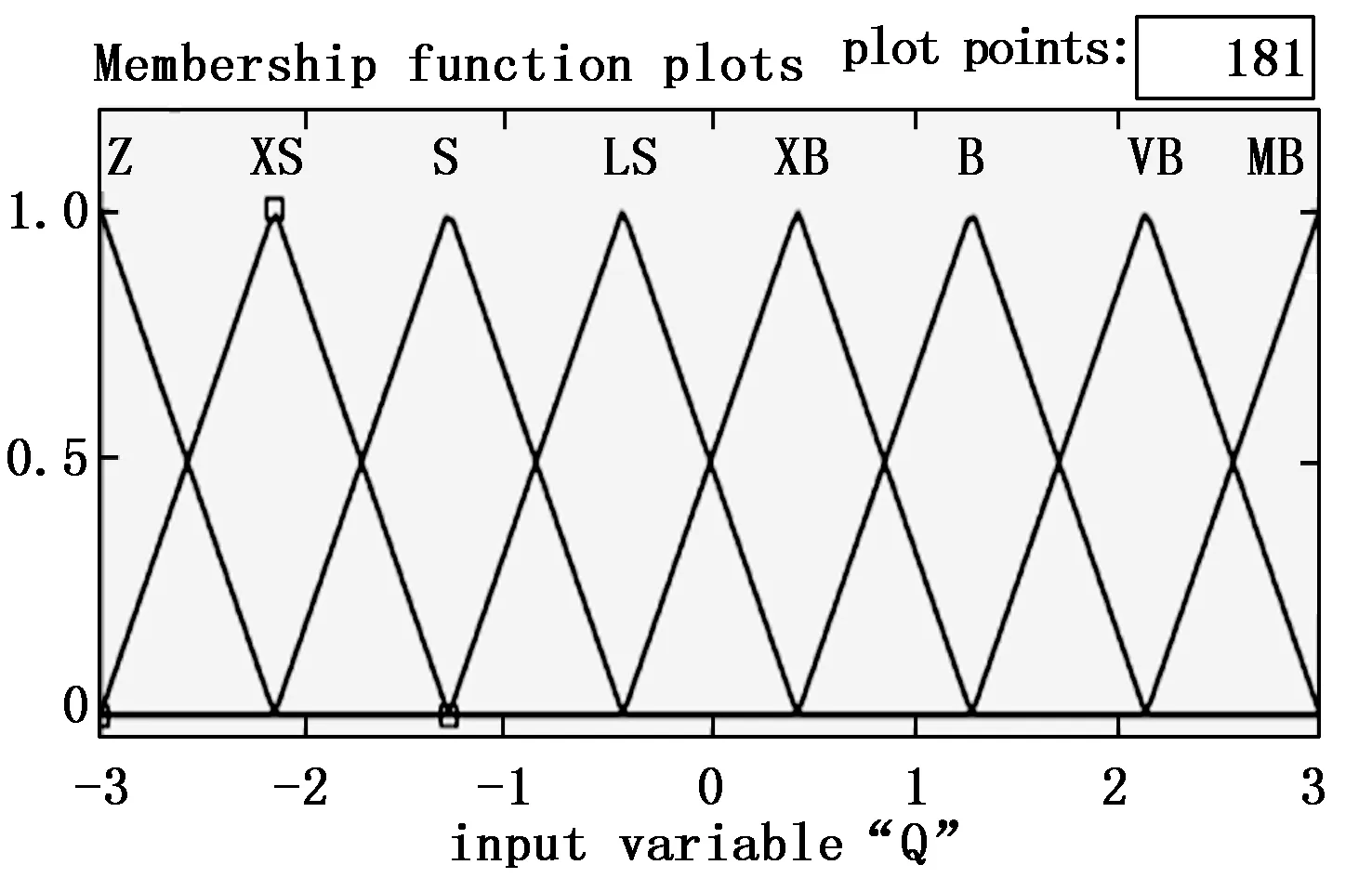
圖5 Q的隸屬度函數(shù)
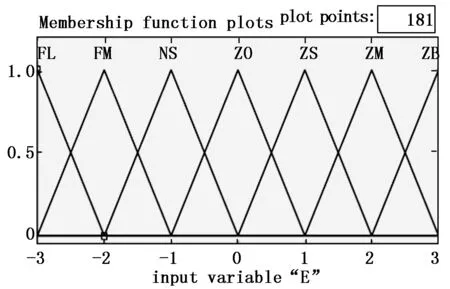
圖6 E的隸屬度函數(shù)

圖7 T的隸屬度函數(shù)
3.3.4 規(guī)則表
模糊控制主要是通過設定好的控制規(guī)則來實現(xiàn)的,本文的輸入為八個和七個等級,因此共有56個控制的規(guī)則組合,具體的模糊控制規(guī)則表4所示。
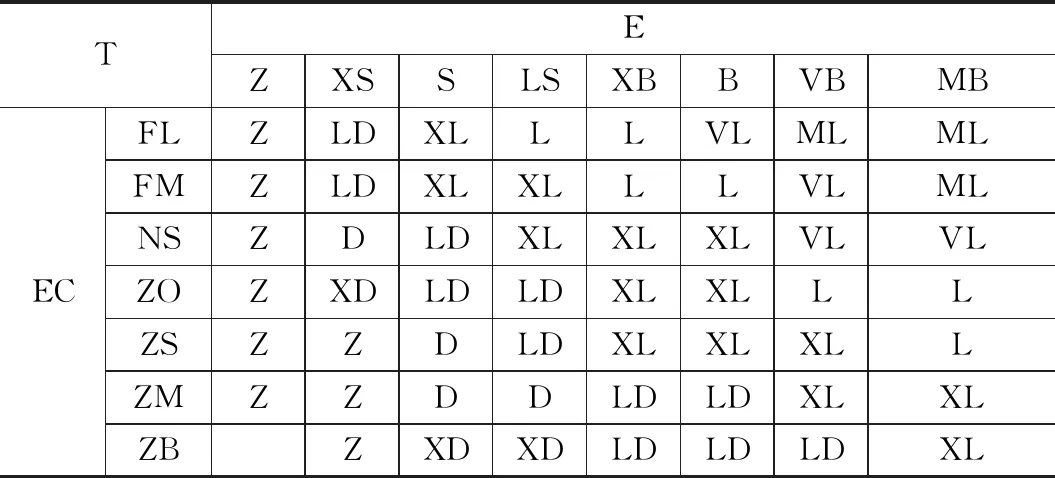
表4 模糊控制規(guī)則表
4 系統(tǒng)測試
采用土壤中安裝的傳感器檢測出土壤含水量,然后用設計好的RBF神經(jīng)網(wǎng)絡計算出需要灌溉的水量和灌溉的時間,RBF神經(jīng)網(wǎng)絡訓練誤差如圖8所示。
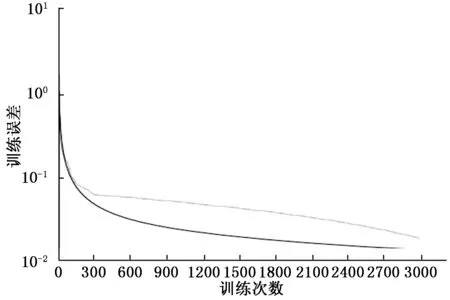
圖8 訓練誤差圖
由圖8可知,誤差值開始的時候下降的梯度較大,隨著訓練次數(shù)的增加,下降的速度不斷減少,最終趨于穩(wěn)定。因此,本文的RBF神經(jīng)網(wǎng)絡預測模型能夠比較穩(wěn)定的實現(xiàn)灌溉,滿足設計的需求。
訓練結束后對進行預測,橫坐標指樣本編號,縱坐標指需水量,實現(xiàn)指實際檢測的需水量,虛線指預測到的需水量。具體的預測結果如圖9所示。
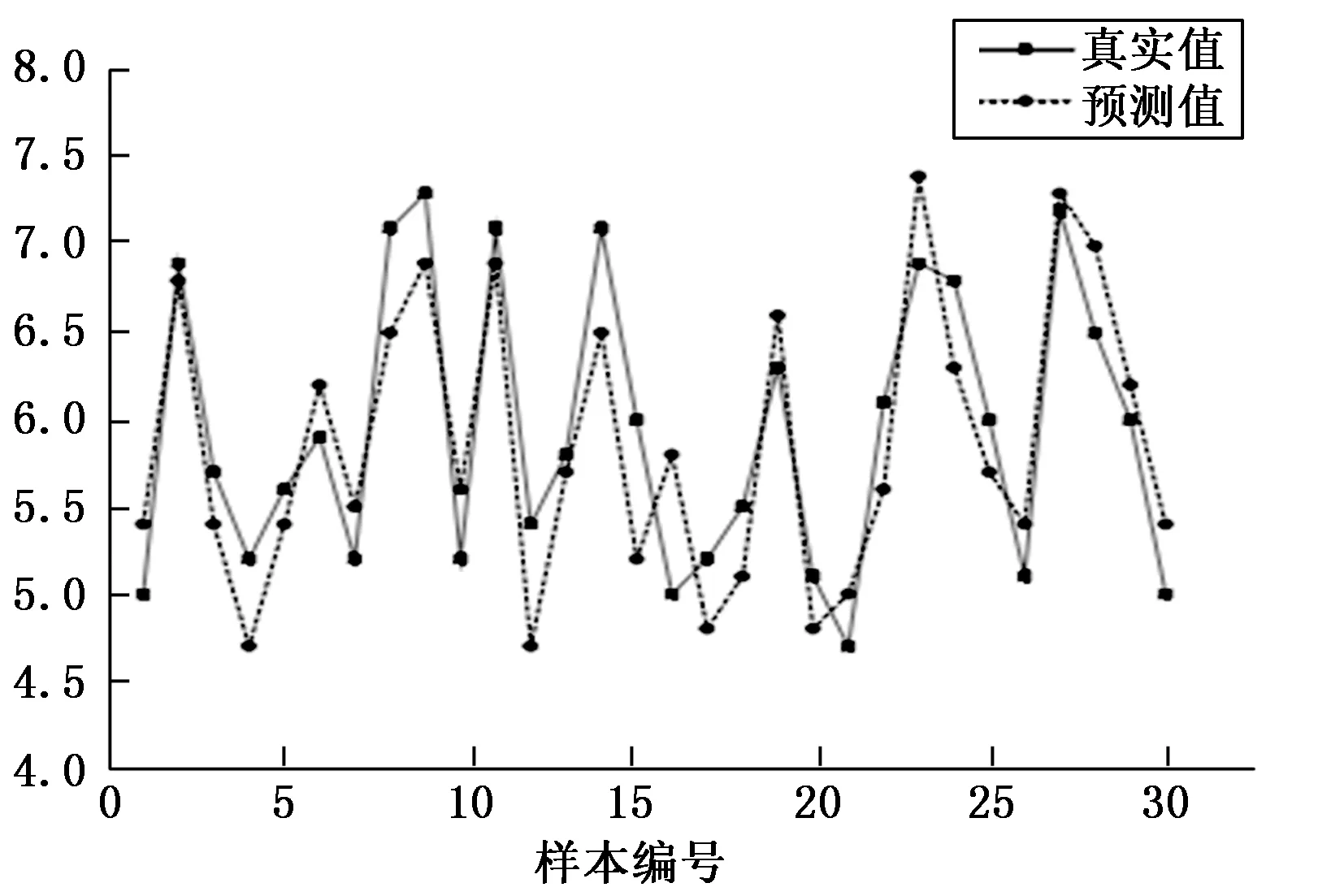
圖9 農作物需水量實際值和預測值分布
由圖可知,預測值和實際值之間的差值較小,即預測誤差小,預測值滿足實際需求。
在MATLAB的工具箱中設置模糊控制器,設置為雙輸入單輸出的控制器,并將輸入輸出變量的命名進行更改,設計的控制器結構如圖10所示。
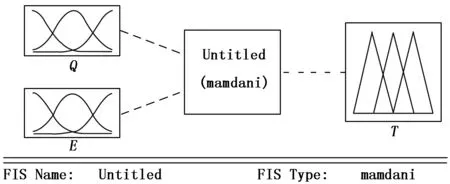
圖10 模糊控制器結構
對模糊控制器的輸入和輸出函數(shù)的隸屬度進行編輯后,建立模糊控制規(guī)則,對本設計的56條控制規(guī)則逐一設置。模糊控制規(guī)則設計窗口如圖11所示。
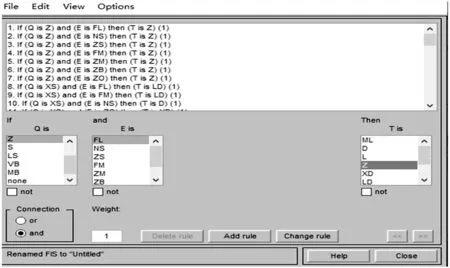
圖11 模糊控制規(guī)則
模糊控制器建立完成后,設置x軸為灌溉需水量和土壤水分的差值,y軸為土壤濕度變化率,z軸為計算的灌溉時間。實際的輸出結果如圖12所示。
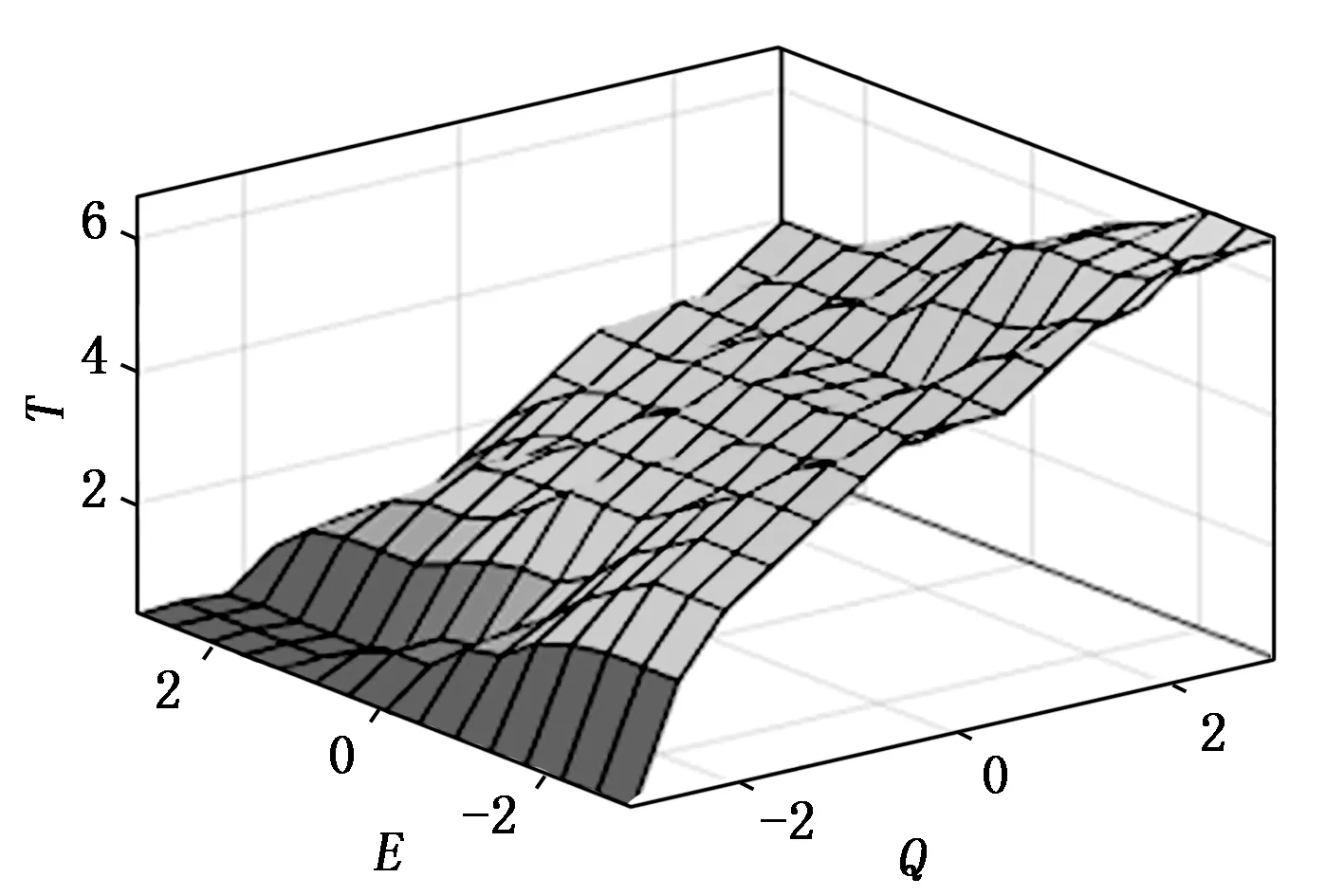
圖12 模糊控制結構曲面圖
模糊控制器會根據(jù)實際的狀況算出實際灌溉時間,輸出結果如圖13所示。當兩個輸入分別為1.93,1.17時,輸出為3.78,乘以比例因子257 S,計算出的灌溉時間為971.46 s。
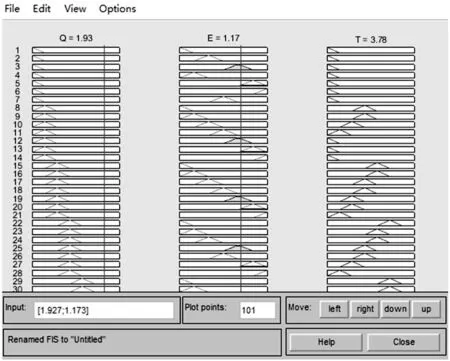
圖13 模糊控制輸出結果
5 結束語
本文首先對作物的需水特性進行分析,確定了四個影響作物因子的函數(shù),作為RBF神經(jīng)網(wǎng)絡的輸入來逼近計算作物的需水量,并以山西省忻州地區(qū)種植的玉米利合328號為例,建立模糊控制器,根據(jù)不同的環(huán)境參數(shù)計算出不同的灌溉時間。并對RBF神經(jīng)網(wǎng)絡和模糊控制器進行 MATLAB仿真,保證了使用的可行性。最終實驗測試結果顯示,在相同的環(huán)境條件下,本設計的灌溉控制器可以實時控制灌溉時間,在一小時的灌溉時間內,可以節(jié)約用水量達到21%,糧食產量每畝同比增加100公斤。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環(huán)球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42