具有保護(hù)功能的并聯(lián)式太陽能跟蹤裝置結(jié)構(gòu)設(shè)計*
2021-02-22 05:26:16羅嘉慶張禮兵董杭峰毛張萍
科技創(chuàng)新與應(yīng)用 2021年8期
關(guān)鍵詞:支架
羅嘉慶,張禮兵,董杭峰,毛張萍
(嘉興學(xué)院 機(jī)電工程學(xué)院,浙江 嘉興314001)
1 概述
從18 世紀(jì)60年代開始,經(jīng)歷三次工業(yè)革命,人類對化石燃料的大規(guī)模使用已經(jīng)造成嚴(yán)重的環(huán)境問題,因此,必須主動轉(zhuǎn)變和改進(jìn)傳統(tǒng)的能源體系的構(gòu)成。太陽能發(fā)電是最具有前景、最為潔凈、最為可靠以及高性能的能源,具有成本低,利用價值優(yōu)良,無副作用等優(yōu)點。尤其是在居住分散以及較為偏遠(yuǎn)的地區(qū),利用太陽能發(fā)電顯得非常重要。但要得到較高的集熱溫度,太陽能跟蹤裝置必須實時跟蹤太陽,從已知的實驗證明,在太陽能光電中,采用自動跟蹤裝置要比不采用時的接受率高37.7%。自動跟蹤式太陽能發(fā)電裝置包括機(jī)械式[1]、電子式[2]、光電跟蹤[3]和GPS 定位跟蹤[4],而常用的跟蹤裝置一般都為機(jī)械式,其跟蹤太陽精度是影響聚光效果的一個重要因素。基于太陽能跟蹤機(jī)構(gòu)的機(jī)械特性,又可以將跟蹤裝置機(jī)構(gòu)分為單軸跟蹤[5]和雙軸跟蹤[6]。目前,國內(nèi)外學(xué)者已對單軸和雙軸跟蹤裝置進(jìn)行了大量的研究。文獻(xiàn)[7]通過設(shè)計和制作單軸式跟蹤太陽能裝置,并對其進(jìn)行性能測試,得到了較好的實驗效果。而文獻(xiàn)[8]提出了傳統(tǒng)的單軸跟蹤,采用南北軸水平放置、東西向跟蹤和東西軸水平放置、南北向跟蹤,聚光效率低。雙軸跟蹤能控制復(fù)雜,成本高,耗電量大,系統(tǒng)維護(hù)費用高[9]。并聯(lián)機(jī)構(gòu)是指動平臺和靜平臺經(jīng)過不少于兩個彼此獨立的運動鏈相連接,具有兩個或者兩個自由度以上,并且利用并聯(lián)方法驅(qū)動的一種閉環(huán)控制機(jī)構(gòu),相比較于單軸和雙軸機(jī)構(gòu),其具有剛度大、承載能力強(qiáng)、誤差無累計等特點,并且現(xiàn)有的單軸或者雙軸跟蹤裝置,其大多數(shù)不能調(diào)節(jié)太陽能板的高度,僅僅只能改變太陽能板的角度,在惡劣天氣的影響下,由于惡劣天氣的原因,始終展開的太陽能板會造成損壞,為了避免惡劣天氣對光伏發(fā)電裝置造成的影響,一種可調(diào)節(jié)太陽能板高度的保護(hù)機(jī)構(gòu)顯得尤為重要。因此針對目前太陽能跟蹤裝置中存在的問題,提出了一種具有保護(hù)功能的并聯(lián)式太陽能跟蹤裝置結(jié)構(gòu)設(shè)計。
2 具有保護(hù)功能的并聯(lián)式太陽能跟蹤裝置結(jié)構(gòu)的設(shè)計
2.1 太陽能跟蹤裝置的方案設(shè)計
為了盡可能保證太陽光照角度以及熱量的損失以及在惡劣天氣條件下進(jìn)行裝置的自我保護(hù),在設(shè)計上,太陽能光伏支架應(yīng)保證太陽能板能實時跟蹤太陽方位角的變化并能夠及時應(yīng)對突如其來的惡劣天氣的影響,應(yīng)使其具有太陽能板的角度可調(diào)以及上下滑動的功能。為了滿足以上功能,本文設(shè)計的具有保護(hù)功能的并聯(lián)式太陽能跟蹤裝置主要由四個模塊組成,如圖1 所示,由采光支架模塊、底板模塊、角度調(diào)節(jié)模塊和高度調(diào)節(jié)模塊等組成。并在太陽能板一側(cè)安裝風(fēng)速傳感器,實時監(jiān)測環(huán)境風(fēng)速,如果環(huán)境風(fēng)速低于設(shè)置的安全風(fēng)速,則給裝置發(fā)送正常的工作指標(biāo);如果環(huán)境風(fēng)速高于設(shè)置的安全風(fēng)速,調(diào)節(jié)機(jī)構(gòu)與伸縮桿聯(lián)合運動,帶動太陽能板沿著伸縮桿往下滑移并收攏,使其減小迎風(fēng)面積,減小太陽能跟蹤裝置受到的風(fēng)載,提高跟蹤裝置的安全性,使其具備抵抗大風(fēng)天氣的能力。同時,在太陽能板的一側(cè)也安裝了追光器,通過角度調(diào)節(jié)以及高度調(diào)節(jié)模塊自動調(diào)整太陽能板,使其得到更多的太陽能能夠垂直照射在太陽能板上,極大地提高了太陽能的使用效率。

圖1 雙軸太陽能跟蹤系統(tǒng)機(jī)構(gòu)簡圖

圖2 采光支架模塊
2.2 采光支架模塊

圖3 角度調(diào)節(jié)模塊
如圖2 所示,采光支架模塊即是承載由單晶硅組成的太陽能板的支架結(jié)構(gòu),其材料為Q235 結(jié)構(gòu)鋼,主要由太陽能板以及支撐桿組成,本設(shè)計中的采光支架模塊可安裝16 塊單晶硅板,16 塊板呈正方形并依次連接,安裝后的采光支架的重心在幾何中心上。并在太陽能板的一側(cè)安裝追光器,設(shè)計中所采用的追光策略,涉及兩種傳統(tǒng)的追光模式,傳統(tǒng)的追光模式主要有程序式追光和光電式追光,程序式追光具有累計偏差等問題,而光電式追光具有不穩(wěn)定性以及抗干擾能力差等問題,因此本設(shè)計結(jié)構(gòu)擬采用程序式和光電式混合追光的方式來克服以上的問題,使其能保證穩(wěn)定性的前提下還能確保其精度。其主要工作過程為:(1)通過檢測是白天還是晚上,如果是晚上,則整個系統(tǒng)不工作;如果是白天,則系統(tǒng)根據(jù)程序來讓追光器來接受太陽能:(2)檢測是陰天還是晴天,如果是晴天就將追光模式切換到光電模式;如果是陰天則繼續(xù)用程序式追光模式,使太陽能的利用效率最大化。
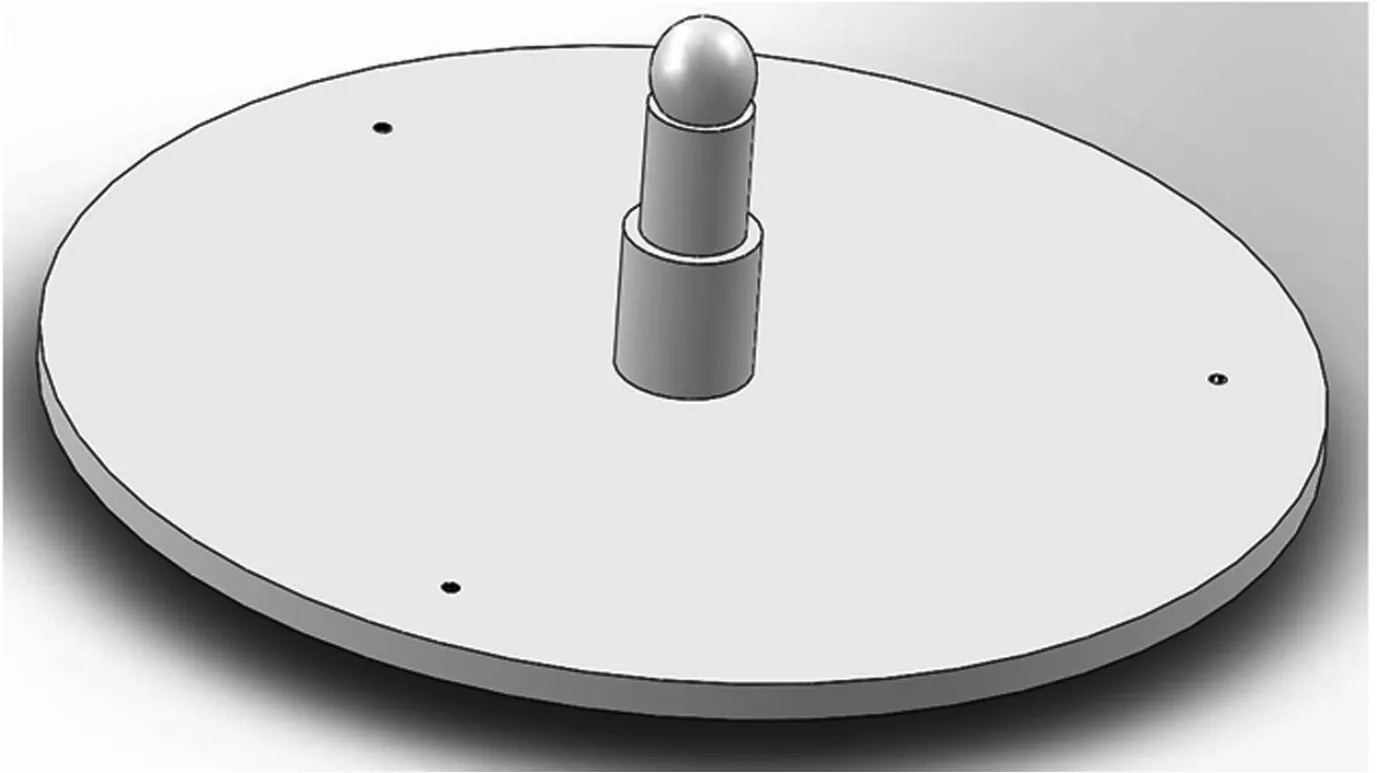
圖4 高度調(diào)節(jié)模塊及底板
2.3 角度調(diào)節(jié)模塊
如圖3 所示,太陽能板與底板之間三等分設(shè)置用于調(diào)節(jié)太陽能角度的角度調(diào)節(jié)模塊,其主要由三個傳動帶驅(qū)動裝置組成,用萬向節(jié)與太陽能底板通過鉸接相連,使得其調(diào)節(jié)角度更加精準(zhǔn)。而傳動帶驅(qū)動裝置又由電機(jī)、電機(jī)傳動軸、傳動帶、彈簧以及連桿組成。一方面,連桿與底座鉸接的一側(cè)設(shè)傳動齒輪,各個傳動帶驅(qū)動裝置聯(lián)動配合另一方面,傳動帶驅(qū)動裝置主要通過利用電機(jī)通過傳動帶帶動連桿的運動,從而實現(xiàn)太陽能板的角度以及高度的調(diào)節(jié)。其工作過程為:(1)當(dāng)其不是惡劣天氣時,傳動帶驅(qū)動裝置通過萬向節(jié)來帶動太陽能板的角度調(diào)節(jié),實現(xiàn)對太陽的任意角度的跟蹤;(2)當(dāng)其為惡劣天氣時,傳動帶驅(qū)動裝置與伸縮桿相互配合帶動太陽能板沿著伸縮桿往下滑移,帶動太陽能板下降收攏,實現(xiàn)對太陽能跟蹤裝置的保護(hù)。
2.4 高度調(diào)節(jié)模塊
高度調(diào)節(jié)模塊主要由伸縮桿組成,如圖4 所示,而伸縮桿又由兩個可以相對滑移的空心伸縮管組成,其作為采光支架的支撐與高度調(diào)節(jié)機(jī)構(gòu),其要求是承載性好,輕質(zhì)靈活靈活,體積較小。為了滿足以上要求,其材料采取Q235 結(jié)構(gòu)鋼。伸縮桿底部與底板連接,其頂部與萬向球鉸接,實現(xiàn)支撐和角度調(diào)節(jié)的功能。
2.5 底板模塊
太陽能底板主要由底座,安裝座以及連接座等部分組成,如圖4 所示。底座為梯字形結(jié)構(gòu),連桿同鉸接設(shè)置在底座上端,其中底座設(shè)置在底板上,其采用雙側(cè)分別安裝連桿的方式,減少連桿之間的干涉,同時能夠?qū)Ⅱ?qū)動結(jié)構(gòu)分別設(shè)置在兩側(cè),互不干涉,使其高效工作。太陽能底座上設(shè)有安裝座,連桿與安裝座之間設(shè)有連接座,連接座與安裝座通過螺紋進(jìn)行連接,利用連接座直接與安裝座之間的連接,保證連桿機(jī)構(gòu)能夠直接帶動太陽能板實現(xiàn)角度與高度的調(diào)節(jié)。
3 結(jié)束語
綜上所述,本文對太陽能跟蹤裝置研究現(xiàn)狀進(jìn)行了分析,并針對太陽能跟蹤裝置中存在的問題,設(shè)計了一套具有保護(hù)功能的并聯(lián)式太陽能跟蹤裝置,實現(xiàn)對太陽的自動跟蹤,提高光伏發(fā)電的轉(zhuǎn)化效率。該裝置不僅能夠提高太陽能跟蹤裝置的剛度,而且還能在惡劣天氣條件下對太陽能跟蹤裝置進(jìn)行有效保護(hù)。所設(shè)計的裝置具有成本低和實用性強(qiáng)的優(yōu)點,為太陽能跟蹤裝置設(shè)計與推廣提供了良好的參考價值。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
海洋信息技術(shù)與應(yīng)用(2020年3期)2020-08-24 07:25:10
中國臨床醫(yī)學(xué)影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫(yī)學(xué)工程學(xué)報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業(yè)自動化(2017年2期)2017-03-20 14:26:14
中國繼續(xù)醫(yī)學(xué)教育(2015年6期)2016-01-07 07:38:49
沈陽醫(yī)學(xué)院學(xué)報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55