水田植保機滑轉率的田間測量
2021-02-23 02:46:56劉嘉程周敬東
湖北工業大學學報 2021年1期
關鍵詞:測量
陳 正, 劉嘉程, 周敬東
(湖北工業大學農機工程研究設計院,湖北 武漢 430068)
植保機械是現代化農業生產中不可缺少的重要農業機械,在農業生產中發揮著重要的作用[1-2]。植保機大多時間工作的水田環境屬于泥水混合環境,水田植保機在作業行走過程中驅動輪經常有滑轉現象,當滑轉率過大時,甚至導致植保機原地打滑,不能前進[3]。植保機過度滑轉時,車輪在泥水空轉,也可能會造成驅動輪向下沉陷,直接導致植保機底盤與泥水接觸,致使植保機無法正常工作[4-5]。滑轉影響著植保機在水田行走時各項性能的發揮,因此,只有在容許的滑轉率條件下,植保機才能夠充分發揮自身的驅動能力。為了保證植保機在水田工作時有較高的工作效率,必須控制其驅動輪的滑轉率。因此,對植保機的滑轉率測試研究就顯得非常重要。
1 測量方法
1.1 車輪轉速的測量方法
滑轉率是實際車輪輪速與實際行進速度的差值和實際車輪輪速的比值。為保證滑轉率的精確度,本文采用CM16-65P-1-24型霍爾傳感器,來測量植保機的前后車輪的轉速。該傳感器有3個引腳,分別為正極、信號極、負極,直接輸出的是數字量,具有靈敏度高、輸出信號穩定、頻率響應高、抗干擾電磁能力強、抗污能力強、結構牢固、安裝簡單使用方便等特點[7-8],其通電后,一旦有磁場靠近就能檢測到信號變化。測量在特定時間間隔內的脈沖信號即可測得車輪轉速。該類傳感器由兩部分組成:螺母固定件和檢測物體(磁性磁鐵)。為了便于車輪轉速傳感器的安裝與調試,設計了支撐車輪轉速傳感器的梯形架。梯形架中開有寬度為螺母固定件直徑大小的橫向槽,以方便安裝車輪轉速傳感器的螺母固定件部分,使其可以橫向運動以對準剎車盤上的信號磁鐵;在剎車盤內圓環周圍鉆有與磁鐵直徑相同的槽,用來固定貼緊檢測物體磁鐵。為了提高植保機車輪轉速的測量精度,對剎車盤內圓環環邊固定磁鐵的槽進行了精確設計,增加固定磁鐵槽的個數,在單位時間內提高檢測到脈沖的頻率,以此來提高植保機車輪轉速測量精度。
植保機的四個車輪內側都固定裝有剎車盤,剎車盤內側裝有信號磁鐵,通過支架將輪速傳感器對準剎車盤內側磁鐵處以檢測信號,再通過STC89C52RC單片機采集單位時間內脈沖信號的個數,最后利用無線串口將采集到的脈沖信號發送至接收終端,計算得出植保機車輪轉速
式中:p為磁盤磁極數;t為脈沖頻率寬度。
植保機車輪速度
V輪=N·π·d
式中,d為植保機車輪直徑。
1.2 植保機行進速度的測量方法及原理
采用多普勒低速雷達對植保機行進速度進行測量。該方法測速靈敏度高,可精確測量運動物體的線速度,完全滿足植保機車速實時、準確測量的要求,而且具有較高的系統穩定性與可靠性。該測速雷達就是利用多普勒效應來測量行進的植保機相對于地面的速度雷達。當波源和接受物體間存在徑向相對移動時,接受波的頻率將會發生變化:波源移向接受物時,接受波頻率變高;波源背離接受物時,接受頻率變低。發射波與接受波頻率差就是物體運動的多普勒頻移[9-10]。通過這個頻率差異可以計算出植保機的行進速度。采用低速雷達傳感器測量植保機的平移速度,當植保機向低速雷達運動時,根據多普勒效應,車輛的接受頻率f0會隨著車速的變化而變化,即:
式中:f1為低速雷達發射的電磁波頻率;c為光速;v為植保機運行速度。同理,反射波的頻率f2也會發生改變:
可以得出發射頻率與接受頻率的關系為:
因此,植保機多普勒頻移
最后可以得到車輛運行的速度,計算公式為:
當然,這是比較理想的狀態,低速雷達的方向與植保機行進的方向始終保持一致,這在實際測量中是無法操作的。一般情況下,在測量時低速雷達與地面成35°夾角[11-12]。因此,植保機行進車速
滑轉率
式中,v輪為植保機車輪輪速;v為低速雷達傳感器測得的車速。
2 試驗設計與測試
2.1 測試條件
本試驗選用的是山東眾和多功能自走式噴桿噴霧機。試驗測試裝置通過支架安裝在三腳架上,由于是裸機進行測試,本次實驗植保機采用的是四輪驅動,選用該植保機分別對其低速擋位行駛、中速擋位行駛、高速擋位行駛時滑轉率進行測試。本次試驗于2019年7月1日在洪湖市進行(圖1)。該試驗田為普通水田,本次實驗分別在不同的水層深度、不同的泥腳深度展開。
2.2 傳感器及低速雷達的安裝
實驗分別需要對植保機四個車輪進行轉速測量,因此安裝了四個轉速傳感器及磁盤。其安裝如圖2所示。

圖 1 田間試驗

圖 2 傳感器的安裝
由于雷達在測量速度的過程中需要固定在某一位置,故將低速雷達固定安裝在植保機底盤,且與地面成35°夾角。
2.3 測試系統組成
STC89C52RC芯片通過霍爾傳感器采集4個車輪的轉速,將植保機車輪轉速傳輸給LCD進行動態顯示并進行保存。
低速雷達對植保機車身行進速度進行測量,測量到的車身速度數值通過RS232串口送出,輸入到PC端并且保存。
最后將所測量到植保機在水田行駛時,4個車輪的轉速及車速數據進行同步計算、顯示及保存。
3 結果與分析
植保機不同擋位下滑轉率的測量結果如圖2所示。植保機在水田軟泥路面分別以低速、中速、高速行走時,其左前、右前、左后、右后車輪的滑轉率如圖3所示。
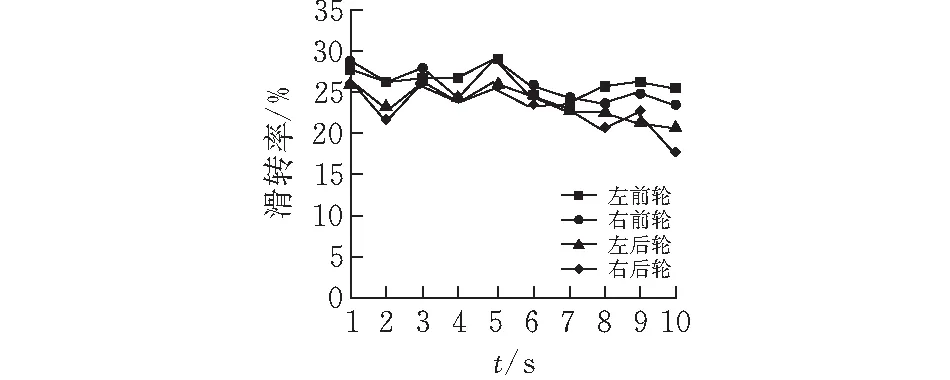
(a)低檔速行駛
由表1可知:植保機在水田軟泥路面行走時,速度越快其滑轉率越低。在低速擋位時,植保機前輪的滑轉率在23.73%~29.15%之間變化,平均滑轉率為26.01%,植保機后輪的滑轉率在18.06%~26.58%之間變化,平均滑轉率為23.33%;在高速擋位時,植保機前輪的滑轉率在17.08%~22.41%之間變化,平均滑轉率為19.39%,植保機后輪的滑轉率在14.48%~20.21%之間變化,平均滑轉率為17.96%。這是因為植保機處于低速擋位時,其速度慢但是其轉矩很大,極其容易發生車輪空轉現象,造成打滑,此時應該加快速度或者增大負載。
由表1可知,在一定條件下,植保機后輪的滑轉率總是低于前輪的滑轉率。本次試驗中,植保機在泥腳深度較大的田間行駛,加裝在車身后面的設備使得車身后輪的負重要大于前輪,且后輪跟地面接觸更加緊實,因而植保機后輪的摩擦力相對于前輪更大一些,所以植保機后車輪更不易發生打滑現象。
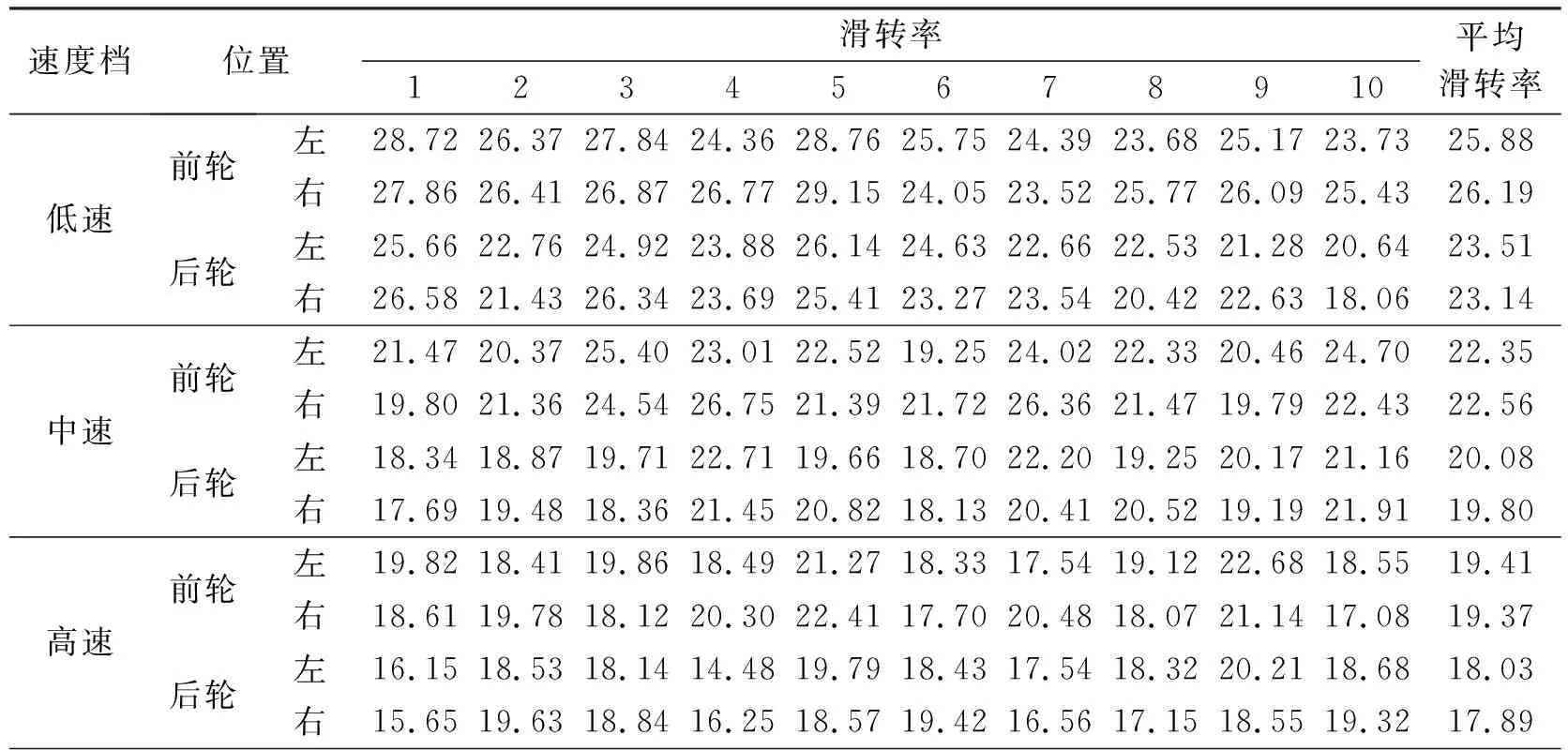
表1 植保機低中高速行進時的滑轉率數據 %
4 結束語
本文采取了霍爾傳感器測量植保機在水田工作時車輪的轉速、低速雷達測量其車身行進速度的方法,研制了一種植保機四輪滑轉率的測量,得出了植保機在工作時每個車輪精確的滑轉率,當滑轉率超過一定范圍時,即出現打滑。所以,結合植保機4個車輪的滑轉率,可以得出植保機在工作時的打滑情況,如單輪打滑還是多輪打滑等,為后續植保機動力分配系統打下了基礎。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00