雙天線GPS/MEMS-INS深組合導(dǎo)航方法研究
2021-02-23 10:41:02穆榮軍蘇炳志崔乃剛
宇航學(xué)報(bào) 2021年1期
龍 騰,穆榮軍,蘇炳志,崔乃剛
(哈爾濱工業(yè)大學(xué)航天學(xué)院,哈爾濱 150001)
0 引 言
近年來(lái)隨著衛(wèi)星導(dǎo)航技術(shù)的高速發(fā)展和中國(guó)自主研發(fā)的北斗衛(wèi)星導(dǎo)航系統(tǒng)全球組網(wǎng),衛(wèi)星導(dǎo)航的應(yīng)用越來(lái)越廣泛,尤其是在車輛和無(wú)人飛行器導(dǎo)航領(lǐng)域。GPS/MEMS-INS(Global Position System, Micro-Electro-Mechanical System, Inertial Navigation System)組合導(dǎo)航作為一種經(jīng)典的導(dǎo)航系統(tǒng)解決方案,以其低成本、高精度、全維度的特點(diǎn)被廣泛研究和應(yīng)用。其組合方式存在三種:松組合、緊組合和深組合。目前普遍采用的松組合和緊組合方式在實(shí)際應(yīng)用中會(huì)面臨兩個(gè)主要問(wèn)題:一是在這兩種組合方式中,衛(wèi)星接收機(jī)都是作為一個(gè)獨(dú)立的設(shè)備提供衛(wèi)星導(dǎo)航測(cè)量信息,組合導(dǎo)航的精度主要依賴接收機(jī)的性能,當(dāng)處于信號(hào)遮擋、衰減、多徑的環(huán)境時(shí),接收機(jī)極易受到干擾,導(dǎo)致可見(jiàn)衛(wèi)星數(shù)量較少甚至無(wú)法定位,從而影響組合導(dǎo)航的輸出;二是當(dāng)組合導(dǎo)航系統(tǒng)的慣性器件為MEMS器件時(shí),由于其精度性能較差,單天線衛(wèi)星接收機(jī)只能提供位置、速度信息,組合導(dǎo)航的航向精度很難提高[1]。針對(duì)這兩個(gè)問(wèn)題,本文對(duì)雙天線GPS/MEMS-INS深組合導(dǎo)航方法進(jìn)行研究,通過(guò)深組合技術(shù)提升衛(wèi)星接收機(jī)在復(fù)雜環(huán)境下的信號(hào)跟蹤性能,利用雙天線載波相位差分提高組合導(dǎo)航系統(tǒng)的航向精度。
慣性/衛(wèi)星深組合技術(shù)基于矢量跟蹤方法[2],是目前最先進(jìn)的衛(wèi)星導(dǎo)航信號(hào)處理技術(shù),自1996年被提出以來(lái)受到眾多學(xué)者的關(guān)注[3]。矢量跟蹤改變傳統(tǒng)標(biāo)量跟蹤各衛(wèi)星通道彼此獨(dú)立的結(jié)構(gòu),對(duì)所有通道進(jìn)行聯(lián)合跟蹤[4],通過(guò)引入慣導(dǎo)輔助的信號(hào)跟蹤環(huán)路,實(shí)現(xiàn)慣性導(dǎo)航和衛(wèi)星導(dǎo)航之間更深的數(shù)據(jù)融合,具有弱信號(hào)跟蹤[5]、高動(dòng)態(tài)跟蹤[6]、橋接中斷信號(hào)[7]等優(yōu)點(diǎn)。矢量跟蹤深組合主要分為兩大類:集中式深組合和級(jí)聯(lián)式深組合。集中式深組合以基帶I/Q數(shù)據(jù)作為導(dǎo)航濾波器的量測(cè)量,導(dǎo)航濾波器控制所有通道本地碼和載波的生成,雖然能在原始數(shù)據(jù)處實(shí)現(xiàn)最深層次的組合,但其濾波器維數(shù)大、更新率高、非線性強(qiáng),難以工程應(yīng)用[8]。級(jí)聯(lián)式深組合采用聯(lián)邦濾波思想,先將基帶信號(hào)預(yù)處理,再進(jìn)行組合導(dǎo)航濾波。根據(jù)預(yù)處理方法分為基于鑒別器的級(jí)聯(lián)式深組合和基于預(yù)濾波器的級(jí)聯(lián)式深組合[9]。由于預(yù)濾波器在應(yīng)用時(shí)對(duì)濾波參數(shù)敏感[10],所以本文采用基于鑒別器的方式設(shè)計(jì)深組合衛(wèi)星信號(hào)跟蹤環(huán)路,使其結(jié)構(gòu)簡(jiǎn)單、具有更強(qiáng)的魯棒性。根據(jù)信號(hào)強(qiáng)度設(shè)計(jì)三種跟蹤結(jié)構(gòu),通過(guò)信號(hào)強(qiáng)度判別方法在線切換,解決深組合導(dǎo)航濾波器易受失準(zhǔn)通道量測(cè)影響、抗差性能較差[11]的問(wèn)題。
雙天線或多天線載波相位差分是衛(wèi)星導(dǎo)航姿態(tài)測(cè)量的主要手段[12]。如果用雙天線載波相位差先計(jì)算載體的姿態(tài)角,再作為深組合導(dǎo)航濾波器的量測(cè)量,在計(jì)算姿態(tài)角階段需使用復(fù)雜的整周模糊度搜索算法和周跳檢測(cè)修復(fù)算法[13]。這不僅增大了系統(tǒng)復(fù)雜度,還帶來(lái)了不穩(wěn)定因素。本文將雙天線載波相位差直接作為導(dǎo)航濾波器的量測(cè)量,避免姿態(tài)角的計(jì)算,同時(shí)可根據(jù)慣導(dǎo)預(yù)測(cè)的姿態(tài)檢驗(yàn)當(dāng)前測(cè)量的相位差是否存在整周誤差,并及時(shí)修正。針對(duì)實(shí)際應(yīng)用中出現(xiàn)的相位差測(cè)量俯仰不準(zhǔn)而影響導(dǎo)航濾波器俯仰角估計(jì)的問(wèn)題,構(gòu)造了視線矢量水平投影矩陣,對(duì)相位差量測(cè)方程進(jìn)行線性變換,使得變換后的相位差量測(cè)量不再包含俯仰信息,實(shí)現(xiàn)在不對(duì)俯仰角造成干擾的條件下修正航向角誤差。
因?yàn)閷?shí)現(xiàn)深組合導(dǎo)航系統(tǒng)涉及到衛(wèi)星接收機(jī)的改造,使用軟件無(wú)線電技術(shù)具備開(kāi)發(fā)靈活度高的優(yōu)點(diǎn)[14],所以文章最后基于軟件無(wú)線電開(kāi)發(fā)了雙天線GPS/MEMS-INS深組合導(dǎo)航車載試驗(yàn)系統(tǒng),通過(guò)開(kāi)展城市中的跑車試驗(yàn),驗(yàn)證了所設(shè)計(jì)的深組合導(dǎo)航算法在復(fù)雜環(huán)境中的信號(hào)跟蹤和導(dǎo)航能力。
1 雙天線GPS/MEMS-INS深組合系統(tǒng)方案設(shè)計(jì)
圖1所示為雙天線GPS/MEMS-INS深組合導(dǎo)航系統(tǒng)的總體方案。
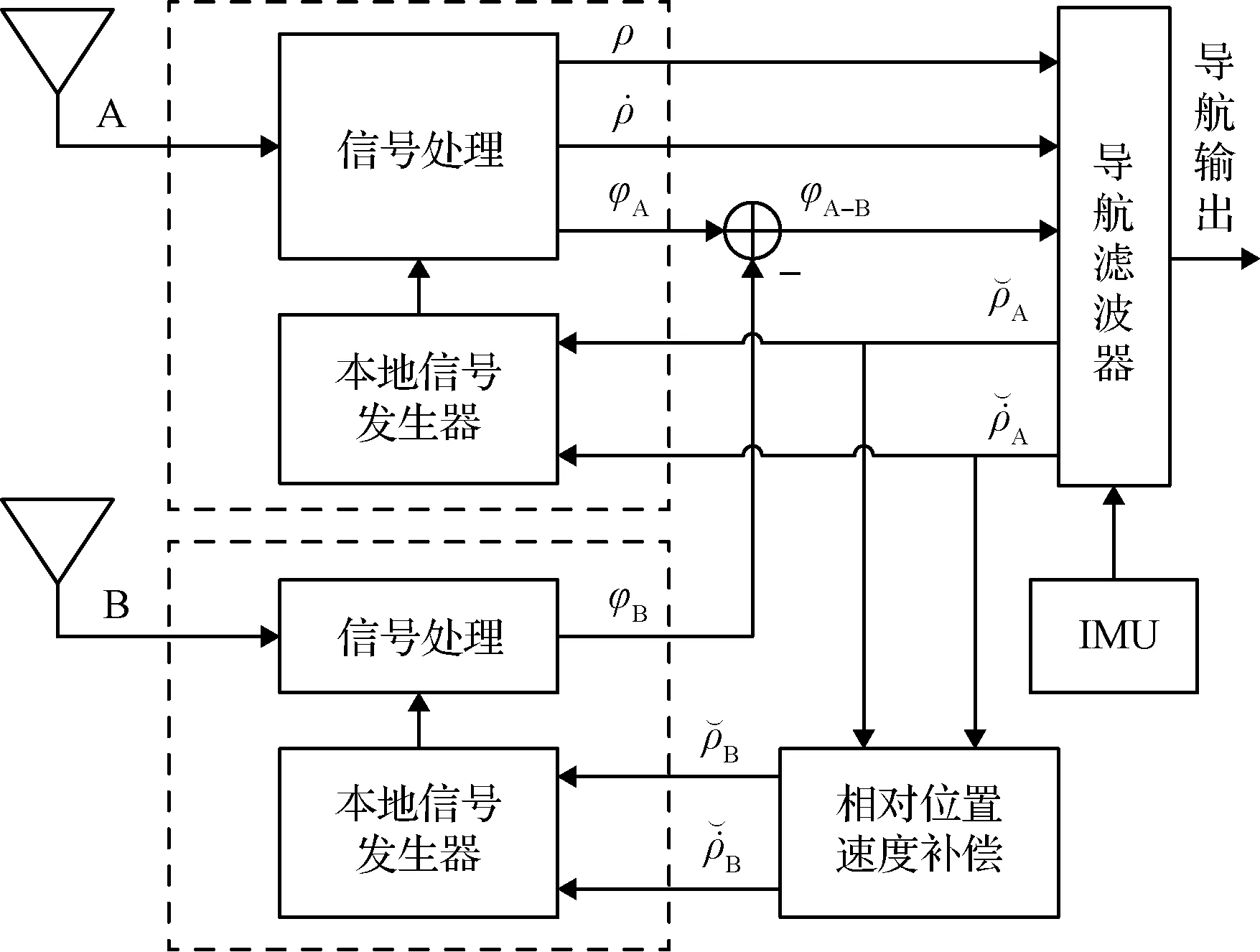
圖1 雙天線GPS/MEMS-INS深組合導(dǎo)航系統(tǒng)總體方案Fig.1 Dual-antenna GPS/MEMS-INS deeply-coupled navigation system architecture

2 矢量跟蹤環(huán)路設(shè)計(jì)
2.1 矢量跟蹤環(huán)路結(jié)構(gòu)
將信號(hào)按強(qiáng)度分為三個(gè)等級(jí):強(qiáng)信號(hào)、弱信號(hào)、失鎖狀態(tài)。強(qiáng)信號(hào)表現(xiàn)為載噪比較大,使用傳統(tǒng)跟蹤環(huán)路可以穩(wěn)定跟蹤;弱信號(hào)表現(xiàn)為載噪比較小或信號(hào)存在較大波動(dòng),載波跟蹤可能不穩(wěn)定;失鎖狀態(tài)表現(xiàn)為信號(hào)很弱導(dǎo)致無(wú)法被跟蹤。
在基于二階鎖相環(huán)的傳統(tǒng)跟蹤環(huán)路(見(jiàn)圖2)基礎(chǔ)上,針對(duì)上述信號(hào)特性,設(shè)計(jì)了三種矢量跟蹤結(jié)構(gòu),如圖3~圖5所示。
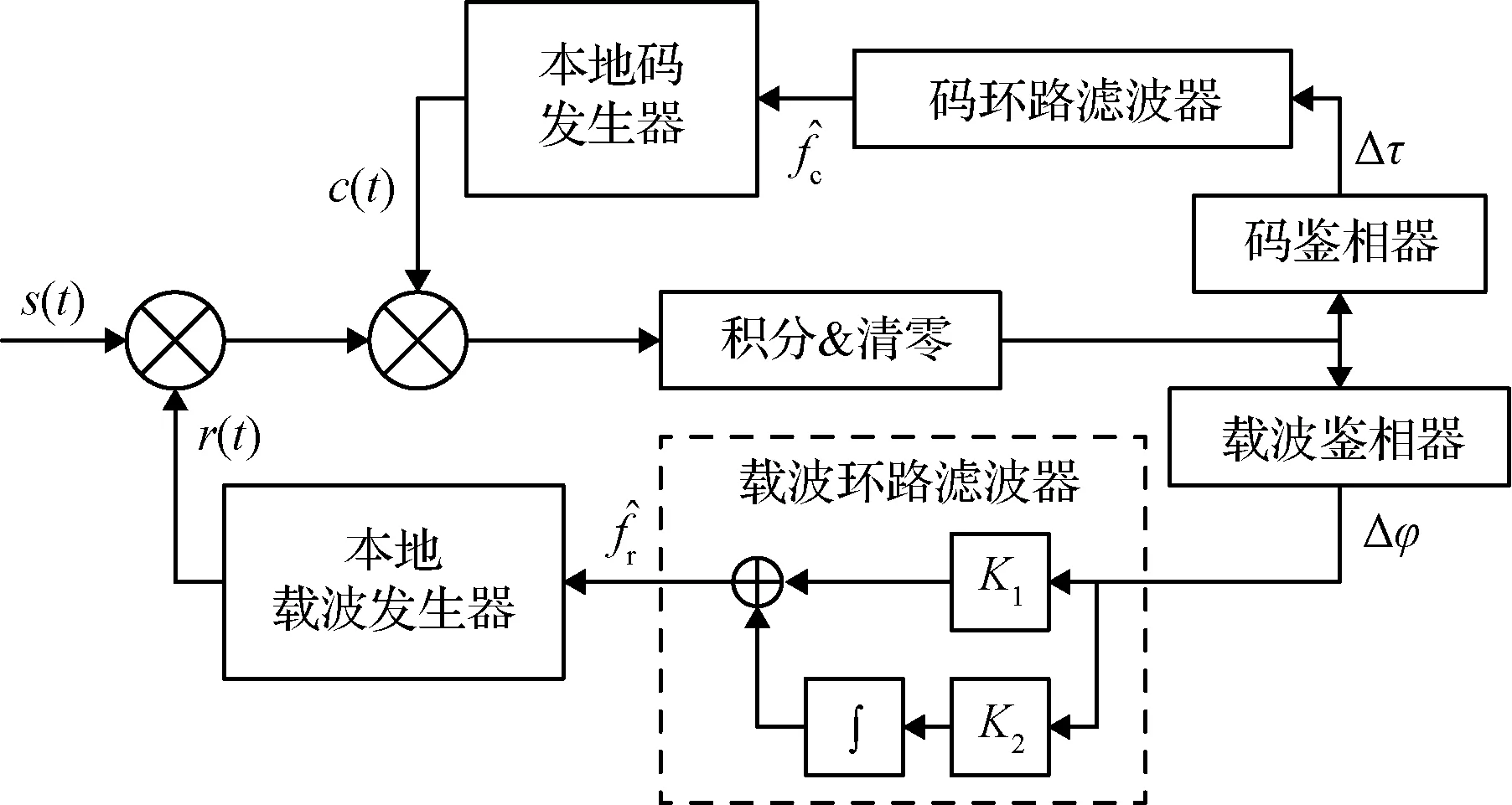
圖2 基于二階鎖相環(huán)的傳統(tǒng)跟蹤環(huán)路Fig.2 Traditional tracking loop based on second-order PLL
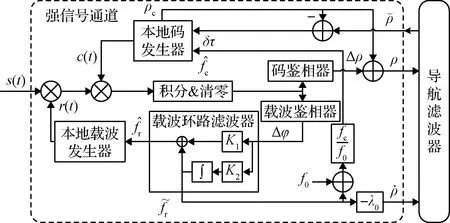
圖3 強(qiáng)信號(hào)通道矢量跟蹤環(huán)路Fig.3 Vector tracking loop in strong signal channel
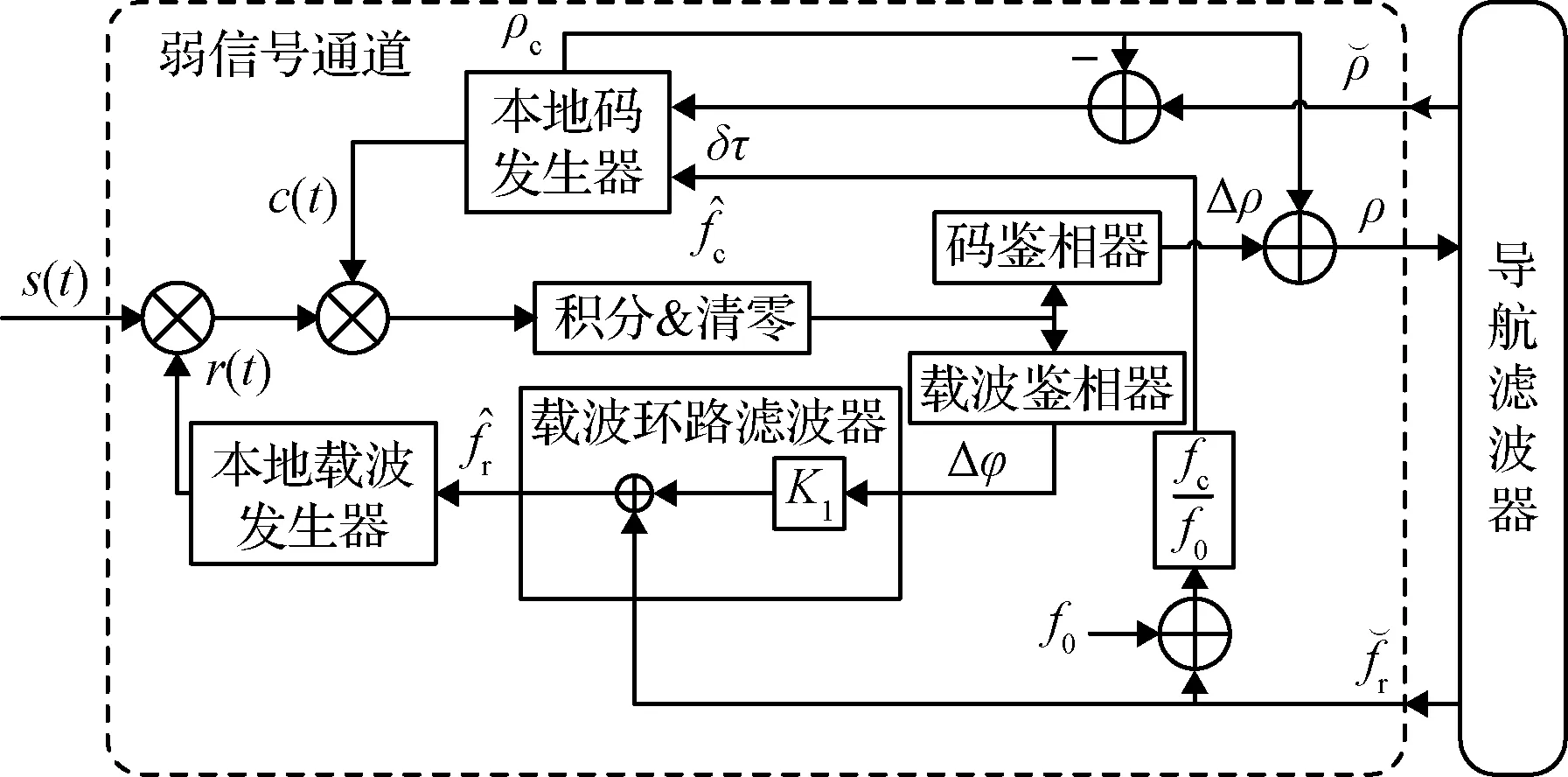
圖4 弱信號(hào)通道矢量跟蹤環(huán)路Fig.4 Vector tracking loop in weak signal channel
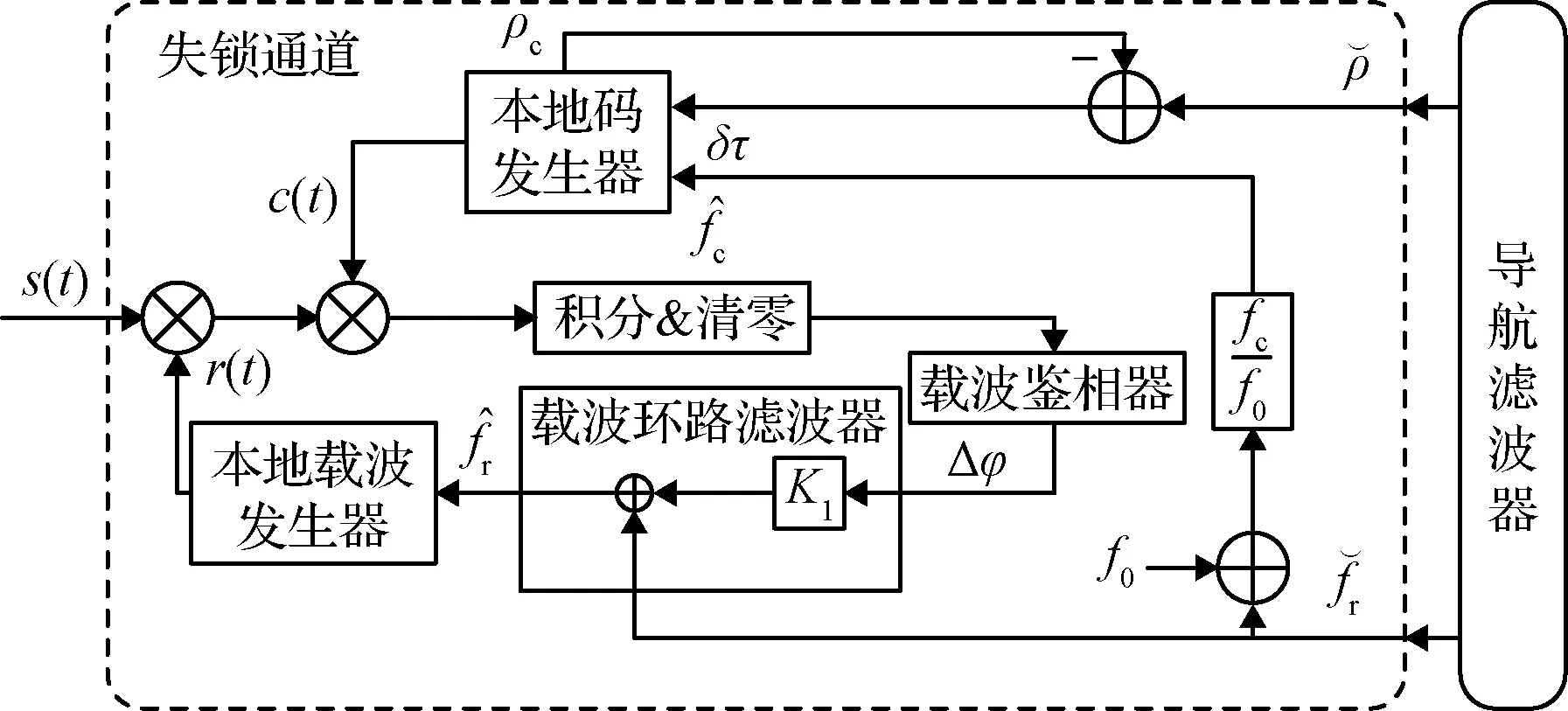
圖5 失鎖通道矢量跟蹤環(huán)路Fig.5 Vector tracking loop in loss-of-lock channel

在所有信號(hào)強(qiáng)度下,碼跟蹤統(tǒng)一采用矢量碼跟蹤環(huán)。將傳統(tǒng)碼跟蹤環(huán)斷開(kāi),去掉碼環(huán)路濾波器,本地碼發(fā)生器由載波頻率計(jì)算的碼頻率直接驅(qū)動(dòng)。取本地碼發(fā)生器碼相位計(jì)算的偽距加上碼鑒相器輸出折算成的偽距誤差作為所在通道的偽距測(cè)量值,輸入導(dǎo)航濾波器。導(dǎo)航濾波器根據(jù)當(dāng)前位置計(jì)算所有通道的理論偽距,理論偽距與碼相位計(jì)算的偽距做差得到碼相位誤差,用于修正本地碼發(fā)生器的碼相位。由于失鎖通道無(wú)法測(cè)量到真實(shí)信號(hào),所以不再向?qū)Ш綖V波器提供偽距輸出,只做碼相位修正,保證在失鎖期間跟蹤碼相位,等待信號(hào)恢復(fù)。由于信號(hào)跟蹤的處理周期要快于導(dǎo)航濾波器的更新周期,通過(guò)碼鑒相器獲得偽距誤差可以取濾波更新周期內(nèi)碼鑒相器輸出的均值,以降低偽距測(cè)量噪聲。
對(duì)于載波跟蹤,為提高導(dǎo)航速度精度,本文并未引入矢量鎖頻環(huán),而是在強(qiáng)信號(hào)時(shí)保留傳統(tǒng)二階鎖相環(huán)獨(dú)立跟蹤。主要基于以下原因:若構(gòu)造矢量鎖頻環(huán),需要像碼環(huán)一樣將載波環(huán)打開(kāi),通過(guò)載波鑒相器或鑒頻器得到當(dāng)前載波頻率誤差,從而得到偽距率測(cè)量值。但這樣測(cè)量的偽距率噪聲較大,導(dǎo)致導(dǎo)航濾波器輸出的速度噪聲也較大。若用二階鎖相環(huán)先測(cè)出偽距率,再傳給導(dǎo)航濾波器處理,相當(dāng)于對(duì)速度進(jìn)行了兩次濾波,可以將最終的速度噪聲壓制到較低的水平。
雖然鎖相環(huán)跟蹤精度高,但也很脆弱,當(dāng)信號(hào)較弱時(shí),容易出現(xiàn)跟蹤不穩(wěn)定的現(xiàn)象,所以弱信號(hào)和失鎖通道使用頻率輔助載波跟蹤環(huán)。導(dǎo)航濾波器根據(jù)當(dāng)前速度計(jì)算理論偽距率,驅(qū)動(dòng)本地載波發(fā)生器,使用載波相位的比例控制實(shí)現(xiàn)載波相位跟蹤。在數(shù)學(xué)模型上相當(dāng)于速度前饋的一階鎖相環(huán),如圖6所示(圖中vφ為載波相位噪聲,vf為載波頻率噪聲,φi為實(shí)際信號(hào)的載波相位,φo為本地載波發(fā)生器的載波相位)。由于載波環(huán)路濾波器中沒(méi)有積分器,不會(huì)出現(xiàn)因?yàn)橐欢螘r(shí)間的弱信號(hào)導(dǎo)致積分器積分值誤差過(guò)大的情況。這種跟蹤環(huán)路無(wú)論信號(hào)多么弱,甚至失鎖均可保持運(yùn)行,一旦信號(hào)恢復(fù),一階環(huán)路會(huì)迅速完成相位鎖定。
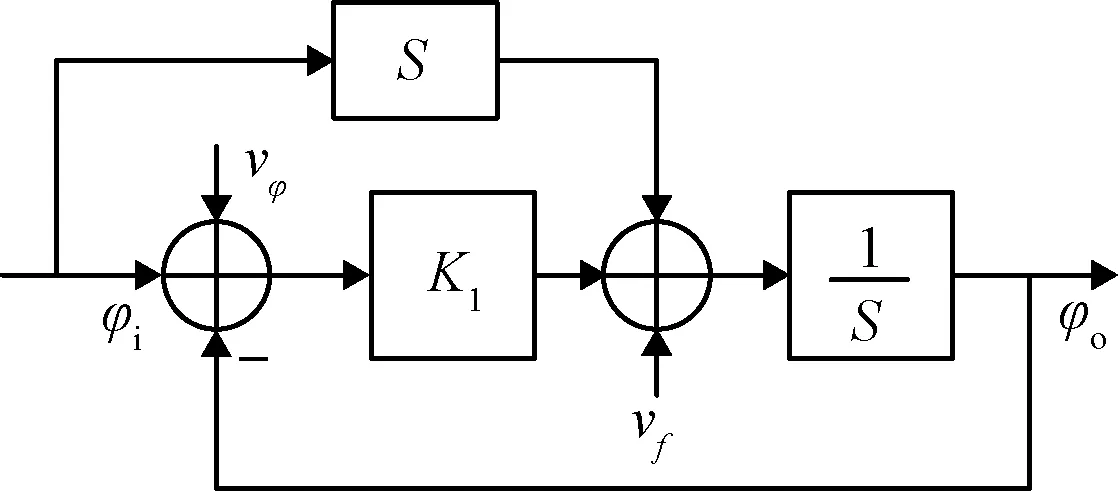
圖6 速度前饋一階鎖相環(huán)系統(tǒng)模型Fig.6 Velocity feedforward first-order PLL model
本文所提出的矢量跟蹤環(huán)路具有下述優(yōu)勢(shì):
1) 矢量碼跟蹤環(huán)利用接收機(jī)位置將所有通道的碼跟蹤耦合在一起,使碼跟蹤精度不再依賴信號(hào)強(qiáng)度,即使弱信號(hào)和失鎖通道均能保持良好的碼相位跟蹤,信號(hào)恢復(fù)時(shí)不必重新進(jìn)行碼相位搜索。
2) 載波跟蹤采用傳統(tǒng)二階鎖相環(huán)和頻率輔助載波跟蹤環(huán)兩種策略,不僅提高了導(dǎo)航速度精度,還能在弱信號(hào)和失鎖時(shí)維持載波跟蹤,信號(hào)恢復(fù)時(shí)也能迅速重新鎖定載波相位。
3) 將信號(hào)強(qiáng)度分級(jí),只容許誤差小的測(cè)量值進(jìn)入導(dǎo)航濾波器參與導(dǎo)航修正,解決不良信號(hào)污染濾波器的問(wèn)題,保證濾波器的穩(wěn)定性和導(dǎo)航精度。
4) 避免復(fù)雜的預(yù)濾波器設(shè)計(jì),在保證跟蹤性能的基礎(chǔ)上簡(jiǎn)化矢量跟蹤結(jié)構(gòu),降低系統(tǒng)復(fù)雜度,使其更容易工程實(shí)現(xiàn)。
2.2 信號(hào)強(qiáng)度判別
為在線判別信號(hào)強(qiáng)度,本節(jié)提出利用瞬時(shí)載噪比、平均載噪比、一個(gè)比特內(nèi)I路數(shù)據(jù)的符號(hào)變化進(jìn)行綜合判別的策略,如圖7所示。
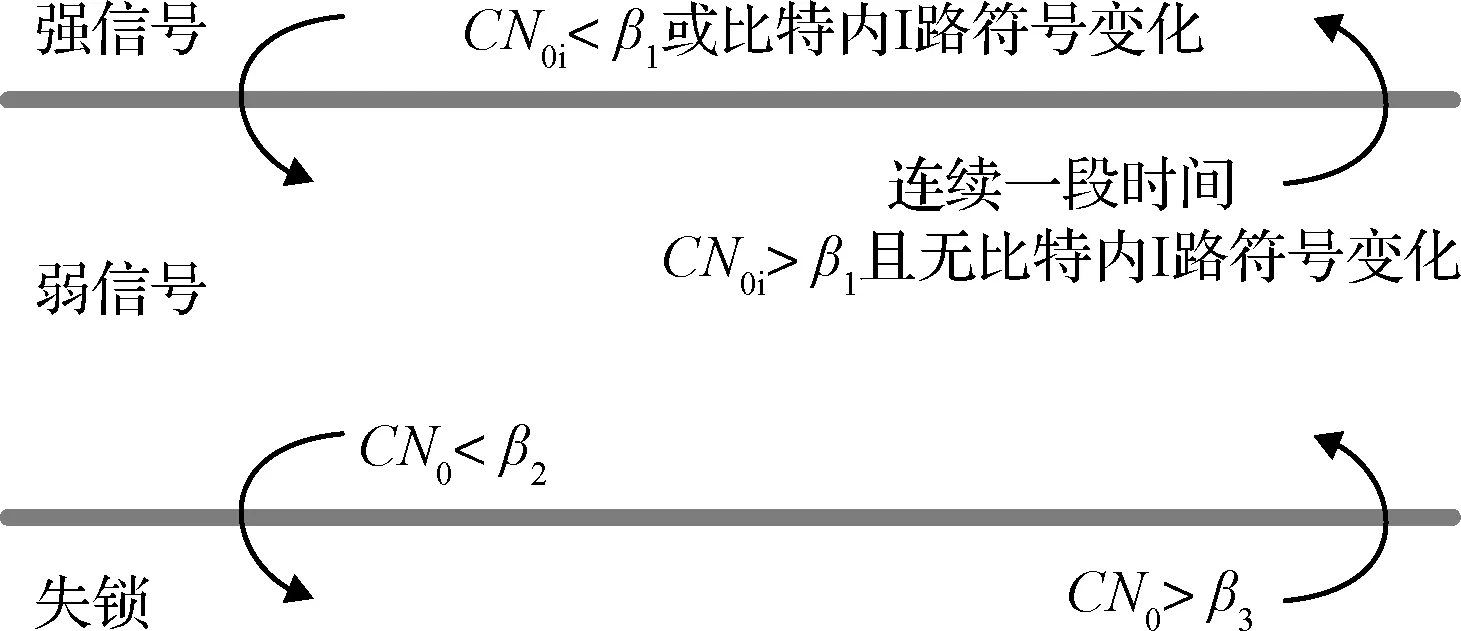
圖7 信號(hào)強(qiáng)度判別策略示意圖Fig.7 Illustration of signal intensity discrimination strategy
瞬時(shí)載噪比CN0i為20 ms I/Q數(shù)據(jù)利用窄帶寬帶功率比值法[15]計(jì)算的載噪比,其計(jì)算噪聲較大,當(dāng)數(shù)值較小時(shí),表示信號(hào)可能不好,也可能是計(jì)算噪聲造成的。本著寧可錯(cuò)判、不能漏判的原則,在強(qiáng)信號(hào)時(shí)若檢測(cè)到瞬時(shí)載噪比低于閾值β1就轉(zhuǎn)為弱信號(hào)。在強(qiáng)信號(hào)狀態(tài)下,跟蹤得到的導(dǎo)航電文比特一定是清晰的,在一個(gè)比特內(nèi)I路數(shù)據(jù)的符號(hào)一定相同。如果檢測(cè)到一個(gè)比特內(nèi)I路數(shù)據(jù)符號(hào)發(fā)生變化,即使瞬時(shí)載噪比沒(méi)有低于閾值,也應(yīng)將強(qiáng)信號(hào)轉(zhuǎn)為弱信號(hào)。當(dāng)通道處在弱信號(hào)狀態(tài)時(shí),如果檢測(cè)到連續(xù)一段時(shí)間瞬時(shí)載噪比都沒(méi)有低于閾值β1且沒(méi)有發(fā)生比特內(nèi)符號(hào)變化,則重新判定為強(qiáng)信號(hào)。
平均載噪比CN0為1 s內(nèi)瞬時(shí)載噪比的平均值,其計(jì)算噪聲較小,反映一段時(shí)間的平均信號(hào)強(qiáng)度,時(shí)間上稍有滯后。弱信號(hào)時(shí)如果平均載噪比數(shù)值過(guò)低,則判定信號(hào)失鎖,閾值設(shè)為β2。信號(hào)從失鎖狀態(tài)返回弱信號(hào)也由平均載噪比判斷,閾值設(shè)為β3。為避免信號(hào)頻繁在弱信號(hào)與失鎖狀態(tài)之間切換,β3應(yīng)稍大于β2。
3 導(dǎo)航濾波器設(shè)計(jì)
3.1 狀態(tài)方程
選取姿態(tài)失準(zhǔn)角、速度誤差、位置誤差、接收機(jī)鐘差等效距離誤差、接收機(jī)鐘頻差等效速度誤差、三軸陀螺儀零偏、三軸加速度計(jì)零偏作為狀態(tài)變量:
X=[φx,φy,φz,δVN,δVE,δVD,δL,δλ,δh,δtr,
(1)
姿態(tài)失準(zhǔn)角描述真實(shí)導(dǎo)航系(n)到計(jì)算導(dǎo)航系(n)′的旋轉(zhuǎn)關(guān)系,在小角度條件下有如下近似形式:
(2)
由于系統(tǒng)使用MEMS慣導(dǎo),其精度無(wú)法敏感地球自轉(zhuǎn)角速度和有害加速度,所以利用慣導(dǎo)誤差傳播方程構(gòu)建系統(tǒng)狀態(tài)方程時(shí),不必考慮包含地球自轉(zhuǎn)角速度和有害加速度的項(xiàng),則狀態(tài)變量的微分方程簡(jiǎn)化為:
X+w=AX+w
(3)
(4)
(5)
(6)

離散形式的狀態(tài)方程為:
Xk+1=(I+AT)Xk+Twk=ΦXk+Twk
(7)
式中:T為濾波器更新周期。
3.2 量測(cè)方程
導(dǎo)航濾波器選取偽距誤差、偽距率誤差、載波相位差誤差為量測(cè)量。
在一階近似情況下,偽距誤差與導(dǎo)航位置誤差、鐘差等效距離誤差的關(guān)系為:
(8)
式中:ρI為使用慣導(dǎo)解算位置計(jì)算的天線相對(duì)衛(wèi)星的距離,ρS為衛(wèi)星信號(hào)處理測(cè)量的偽距,[ex,ey,ez]為ECEF(Earth-Centered Earth-Fixed)系下衛(wèi)星指向接收機(jī)的視線單位矢量。?(x,y,z)/?(L,λ,h)為緯經(jīng)高坐標(biāo)到ECEF坐標(biāo)的雅可比矩陣,表達(dá)式如下:
(9)
式中:sL,cL,sλ,cλ分別表示sinL,cosL,sinλ,cosλ。
在一階近似情況下,偽距率誤差與導(dǎo)航速度誤差、鐘頻差等效速度誤差的關(guān)系為:
(10)

下面推導(dǎo)載波相位差誤差與姿態(tài)失準(zhǔn)角之間的關(guān)系。記當(dāng)前慣導(dǎo)解算的姿態(tài)陣為:
(11)
真實(shí)的姿態(tài)陣為:
(12)
定義A天線指向B天線的位置矢量為系統(tǒng)的基線矢量,則基線矢量在地理系下表示為:
(13)
式中:l為基線長(zhǎng)度,需預(yù)先測(cè)定。
真實(shí)的相位差表達(dá)式為:
(14)

用慣導(dǎo)解算姿態(tài)計(jì)算的地理系下基線矢量為:
(15)
由此計(jì)算的相位差為:
(16)
式(14)與式(16)相減得到載波相位差誤差:
δp=pI-pS=
[uyC31-uzC21uzC11-uxC31uxC21-uyC11]·
(17)
式(8)、式(10)和式(17)共同構(gòu)成了深組合導(dǎo)航濾波器的量測(cè)關(guān)系。量測(cè)方程維數(shù)取決于信號(hào)強(qiáng)度判別,偽距、偽距率、相位差的量測(cè)個(gè)數(shù)分別記為n1,n2,n3。n1等于A天線強(qiáng)信號(hào)和弱信號(hào)通道個(gè)數(shù)的和,n2等于A天線強(qiáng)信號(hào)通道個(gè)數(shù),n3等于跟蹤相同衛(wèi)星A,B天線都是強(qiáng)信號(hào)的通道個(gè)數(shù)。
實(shí)際應(yīng)用中由于兩個(gè)天線獨(dú)立接收信號(hào),信號(hào)所經(jīng)過(guò)的線纜長(zhǎng)度不會(huì)完全相同,所有通道相位差都存在相同的路徑差引起的額外相位差。這個(gè)誤差可以通過(guò)星間差分消除。另外,因?yàn)樗锌梢?jiàn)衛(wèi)星均位于地平面以上,使用相位差確定姿態(tài)時(shí),航向角測(cè)量精度高,而俯仰角測(cè)量精度較差。若直接使用相位差量測(cè),相當(dāng)于對(duì)航向角和俯仰角都做了直接量測(cè),這個(gè)失準(zhǔn)的俯仰角量測(cè)會(huì)影響正常的俯仰角估計(jì)。考慮將視線矢量投影到水平面上,投影后的相位差將不再包含俯仰信息。
原始視線矢量矩陣記為U,表達(dá)式為:
(18)
星間差分矩陣記為B,表達(dá)式為:
(19)
式中:1表示元素全是1的矩陣,I表示單位陣。B陣左乘U陣可以將所有衛(wèi)星的視線矢量與第一顆衛(wèi)星的視線矢量相減,以消除公共路徑差。
完成星間差分后的視線矢量矩陣記為D,表達(dá)式為:
(20)
構(gòu)造視線矢量水平投影矩陣F為:
(21)
F陣左乘D陣結(jié)果的最后一列都為0,使變換后的視線矢量沒(méi)有z方向分量,以達(dá)到水平投影的效果。
執(zhí)行星間差分和視線矢量水平投影的綜合矩陣定義為:
J=FB
(22)
J陣的維數(shù)為(n3-2)×n3,使用J陣對(duì)導(dǎo)航濾波器量測(cè)方程的相位差部分做線性變換,得到最終濾波器所使用的量測(cè)方程。由于線性變換會(huì)使量測(cè)方程降兩維,所以至少要觀測(cè)到三顆衛(wèi)星的相位差才能構(gòu)造相位差量測(cè)方程。
下面將導(dǎo)航濾波器最終使用的量測(cè)量和量測(cè)矩陣進(jìn)行總結(jié):
(23)
(24)
(25)
(26)
(27)
3.3 導(dǎo)航濾波器運(yùn)行流程
導(dǎo)航濾波器的運(yùn)行流程如圖8所示。濾波算法使用卡爾曼濾波。整個(gè)運(yùn)行過(guò)程分為三部分,分別是慣性測(cè)量更新、衛(wèi)星測(cè)量更新和導(dǎo)航誤差修正。每次新的IMU數(shù)據(jù)到來(lái)時(shí)依次執(zhí)行這三個(gè)部分。當(dāng)由于遮擋沒(méi)有衛(wèi)星數(shù)據(jù)可獲得時(shí),只執(zhí)行慣性測(cè)量更新,如圖8中虛線所示。
對(duì)于圖8中導(dǎo)航誤差修正的第6步相位差整周誤差修正部分,由于衛(wèi)星信號(hào)的變化和可能跟蹤到新的衛(wèi)星,載波相位差的周跳現(xiàn)象時(shí)有發(fā)生,需要及時(shí)對(duì)相位差整周誤差進(jìn)行修正。修正方法為:使用當(dāng)前姿態(tài)算出理論相位差,與測(cè)量的相位差相減,如果偏差的絕對(duì)值大于0.5,說(shuō)明發(fā)生了周跳,進(jìn)行整周修正,使偏差的絕對(duì)值小于0.5。
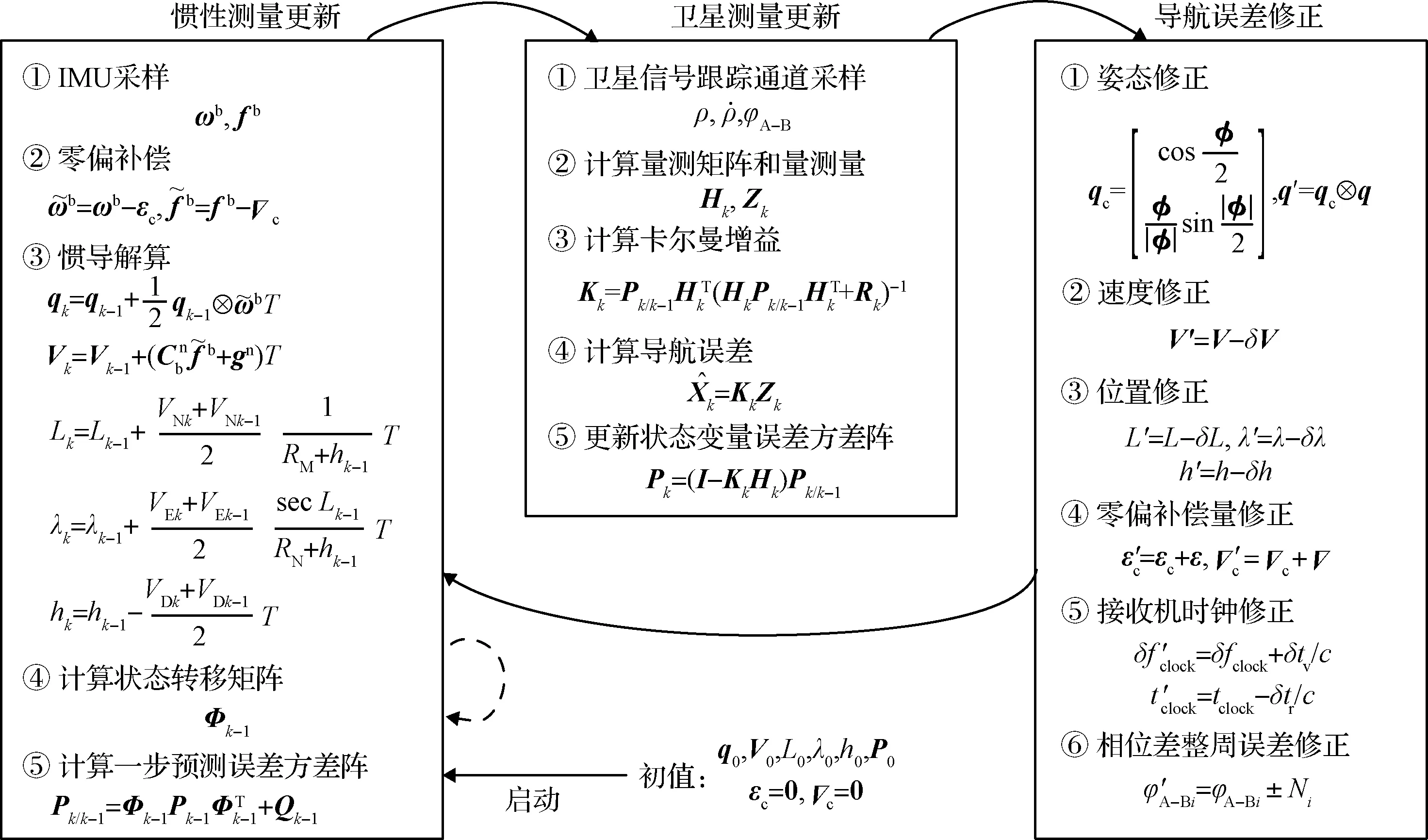
圖8 導(dǎo)航濾波器運(yùn)行流程圖Fig.8 Flow chart of navigation filter
4 深組合導(dǎo)航系統(tǒng)試驗(yàn)驗(yàn)證
4.1 車載試驗(yàn)系統(tǒng)
雙天線GPS/MEMS-INS深組合導(dǎo)航車載試驗(yàn)系統(tǒng)的配置方案如圖9所示,系統(tǒng)實(shí)物如圖10所示。
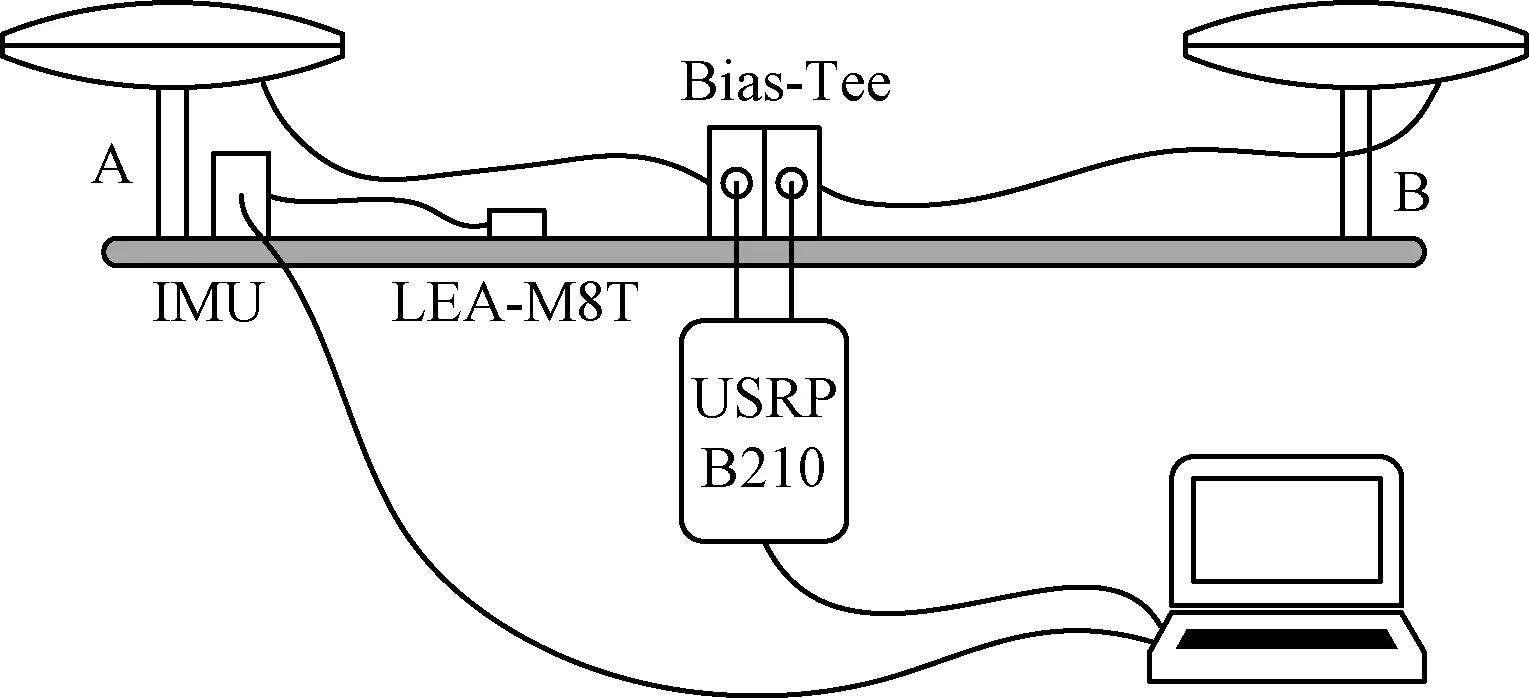
圖9 深組合導(dǎo)航車載試驗(yàn)系統(tǒng)配置方案Fig.9 Deeply-coupled navigation vehicle-mounted test system scheme

圖10 深組合導(dǎo)航車載試驗(yàn)系統(tǒng)實(shí)物圖Fig.10 Deeply-coupled navigation vehicle-mounted test system equipment
系統(tǒng)包括兩個(gè)GNSS天線、兩個(gè)Bias-Tee天線供電模塊、IMU模塊、GNSS授時(shí)模塊、通用軟件無(wú)線電平臺(tái)和筆記本計(jì)算機(jī)。關(guān)鍵器件的主要參數(shù)如表1~表4所示。
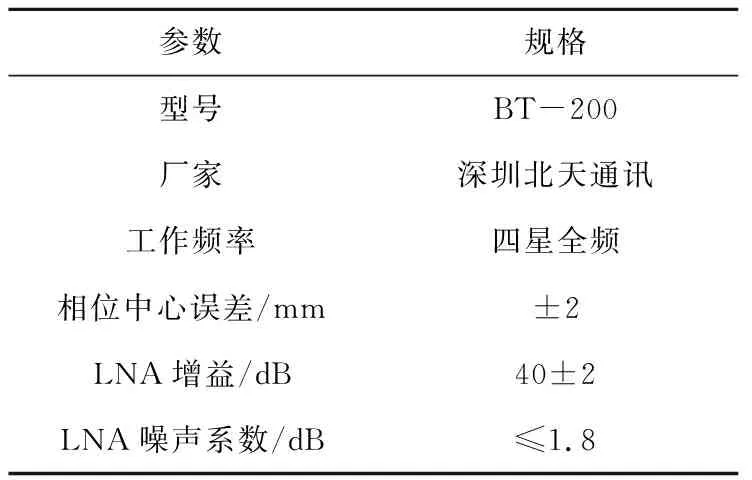
表1 GNSS天線主要參數(shù)Table 1 Main parameters of GNSS antenna
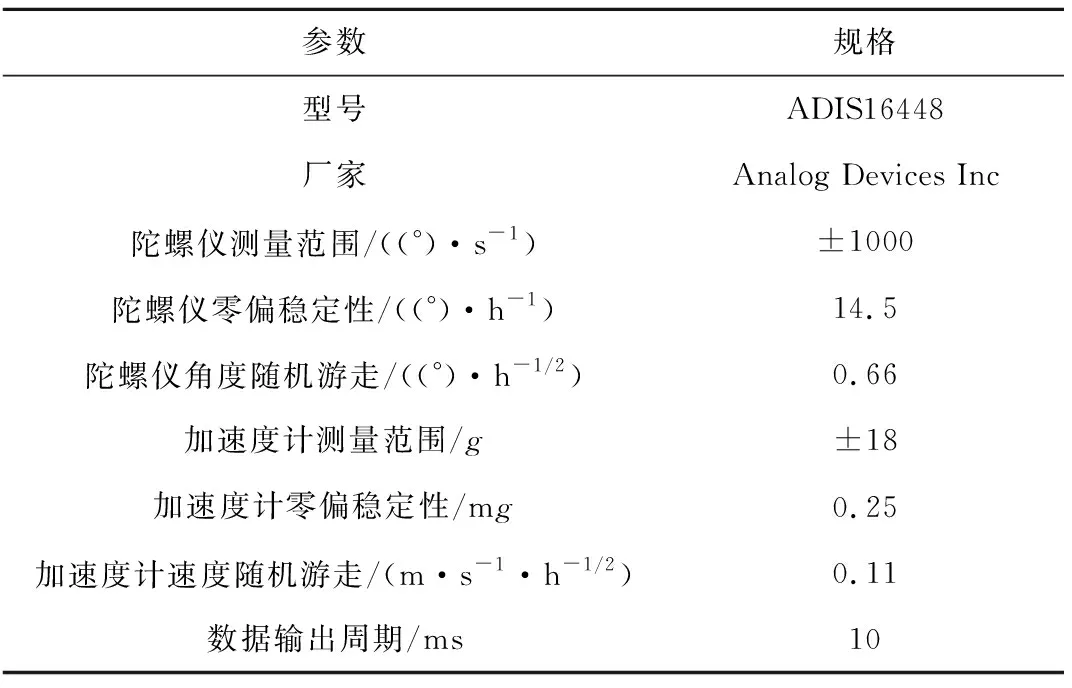
表2 IMU主要參數(shù)Table 2 Main parameters of IMU
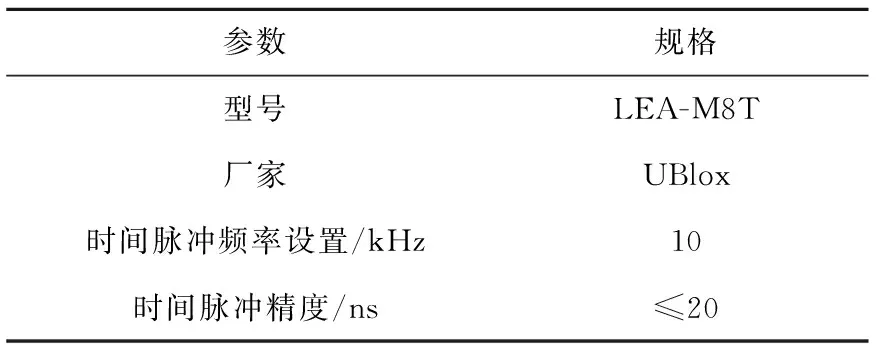
表3 GNSS授時(shí)模塊主要參數(shù)Table 3 Main parameters of GNSS timing module
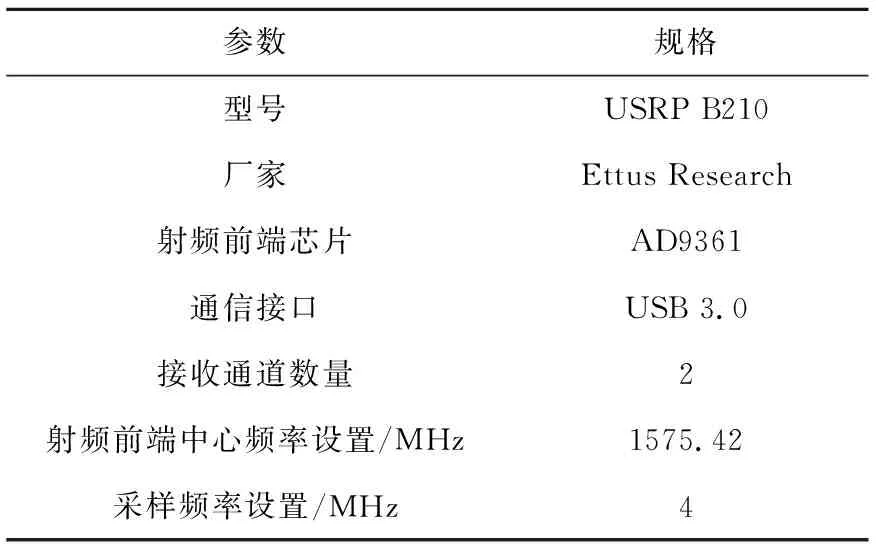
表4 通用軟件無(wú)線電平臺(tái)主要參數(shù)Table 4 Main parameters of universal software radio platform
兩個(gè)天線安裝在導(dǎo)軌的兩端,基線長(zhǎng)度設(shè)置為1.3 m。IMU靠近A天線安裝,以減小IMU與A天線之間的桿臂誤差,IMU的x軸與導(dǎo)軌縱軸平行。試驗(yàn)時(shí)進(jìn)行數(shù)據(jù)采集和存儲(chǔ),離線執(zhí)行深組合導(dǎo)航算法,算法程序使用MATLAB開(kāi)發(fā)。實(shí)際系統(tǒng)中GPS信號(hào)和IMU數(shù)據(jù)是獨(dú)立采集的,為了在算法執(zhí)行時(shí)實(shí)現(xiàn)數(shù)據(jù)對(duì)齊,IMU數(shù)據(jù)采集電路中額外配置一個(gè)GNSS授時(shí)模塊,在每一幀IMU數(shù)據(jù)輸出時(shí)為其打上GPS時(shí)間戳。衛(wèi)星信號(hào)跟蹤的相干積分時(shí)間設(shè)置為1 ms,導(dǎo)航濾波器更新周期設(shè)置為10 ms。
4.2 試驗(yàn)結(jié)果分析
為驗(yàn)證深組合導(dǎo)航系統(tǒng)的性能,在城市環(huán)境中開(kāi)展跑車試驗(yàn),下面給出一組典型的試驗(yàn)結(jié)果。試驗(yàn)地點(diǎn)在哈爾濱工業(yè)大學(xué)附近,試驗(yàn)時(shí)間為2019年8月26日11時(shí)5分,信號(hào)采集時(shí)間10分鐘,初始靜止1分鐘,用于系統(tǒng)初始化。圖11為深組合導(dǎo)航的定位結(jié)果,圖12、圖13為局部放大圖。車輛行駛路徑中經(jīng)過(guò)了樓群、樹(shù)林、橋梁等復(fù)雜環(huán)境,深組合導(dǎo)航系統(tǒng)定位連續(xù),沒(méi)有出現(xiàn)因?yàn)樾l(wèi)星數(shù)量較少導(dǎo)致定位誤差增大的情況,對(duì)短時(shí)信號(hào)中斷有較強(qiáng)的適應(yīng)能力。

圖11 深組合導(dǎo)航系統(tǒng)定位軌跡Fig.11 Deeply-coupled navigation trajectory
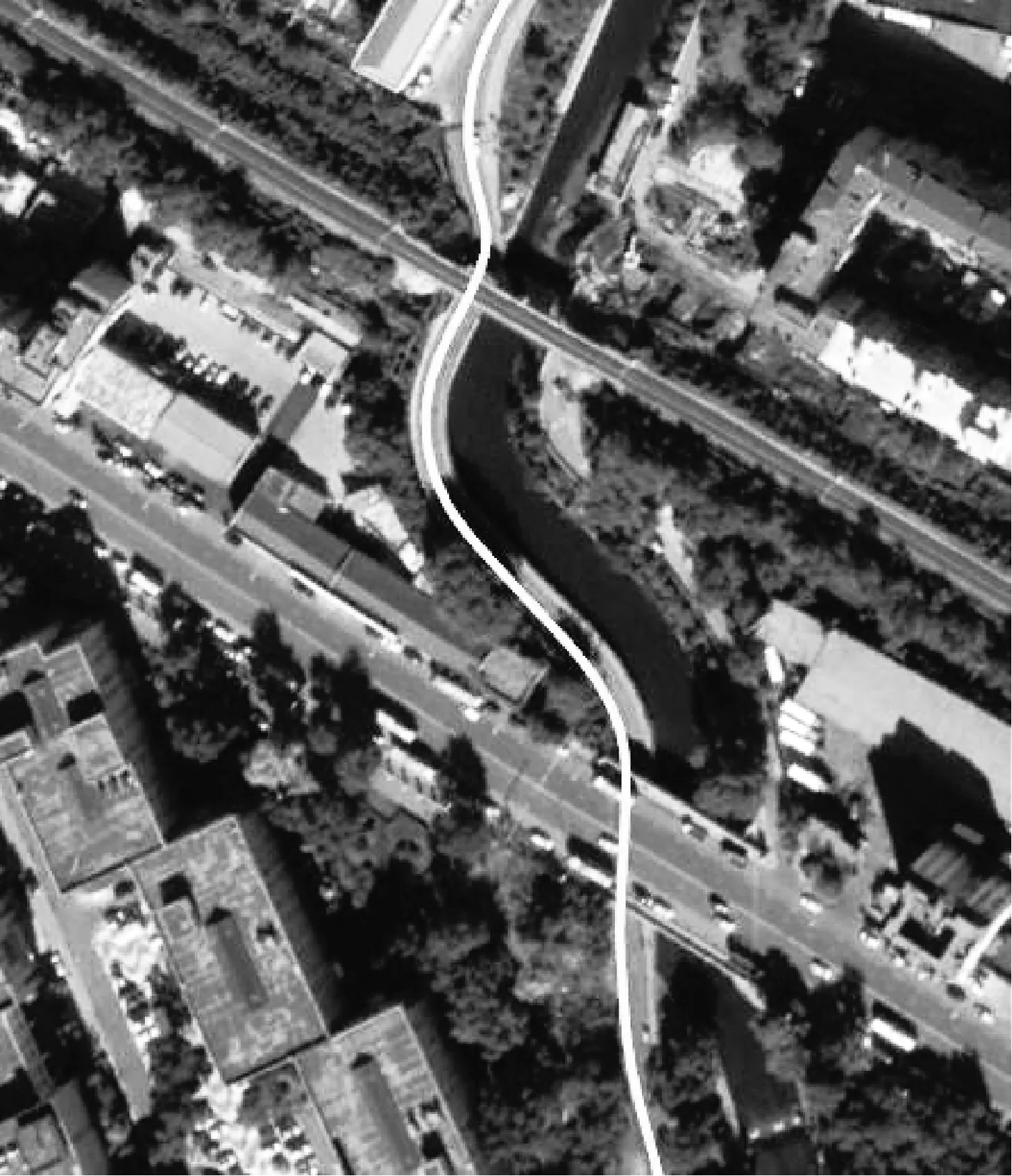
圖12 穿越橋梁時(shí)的導(dǎo)航局部放大圖Fig.12 Enlarged view of trajectory while through bridge

圖13 穿越密林時(shí)的導(dǎo)航局部放大圖Fig.13 Enlarged view of trajectory while through jungle
圖14、圖15分別展示了靜止和運(yùn)動(dòng)時(shí)單獨(dú)GPS速度解算和深組合導(dǎo)航速度輸出的對(duì)比。可以看出深組合導(dǎo)航降低速度噪聲的效果非常明顯,靜止時(shí)速度噪聲僅為0.01 m/s(3σ)。運(yùn)動(dòng)時(shí)深組合導(dǎo)航速度輸出平滑,即使可見(jiàn)衛(wèi)星數(shù)量較少而不能直接測(cè)速時(shí)也能保證連續(xù)輸出(見(jiàn)圖15中105 s~120 s)。

圖14 靜止時(shí)GPS與深組合速度輸出對(duì)比圖Fig.14 Comparison of velocity output between GPS and deeply-coupled navigation in the static
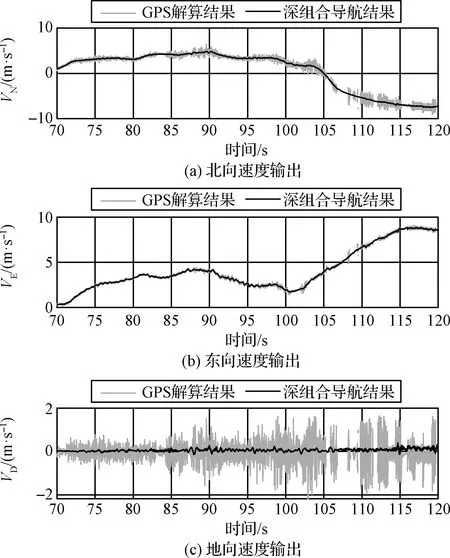
圖15 運(yùn)動(dòng)時(shí)GPS與深組合速度輸出對(duì)比圖Fig.15 Comparison of velocity output between GPS and deeply-coupled navigation in the dynamic
圖16、圖17分別展示了靜止和運(yùn)動(dòng)時(shí)GPS雙天線相位差姿態(tài)解算和深組合導(dǎo)航姿態(tài)輸出的對(duì)比。可以看出靜止時(shí)相位差姿態(tài)解算賦予系統(tǒng)準(zhǔn)確的航向初值,而且維持航向不發(fā)散。深組合導(dǎo)航的姿態(tài)噪聲同樣降得很低,靜止時(shí)僅有0.05°(3σ)。組合后的俯仰角并沒(méi)有跟隨相位差姿態(tài)解算的俯仰角起伏(見(jiàn)圖16(b)),說(shuō)明導(dǎo)航濾波器相位差量測(cè)方程中視線矢量水平投影變換發(fā)揮了作用,屏蔽掉了俯仰量測(cè)。

圖16 靜止時(shí)GPS與深組合姿態(tài)輸出對(duì)比圖Fig.16 Comparison of attitude output between GPS and deeply-coupled navigation in the static
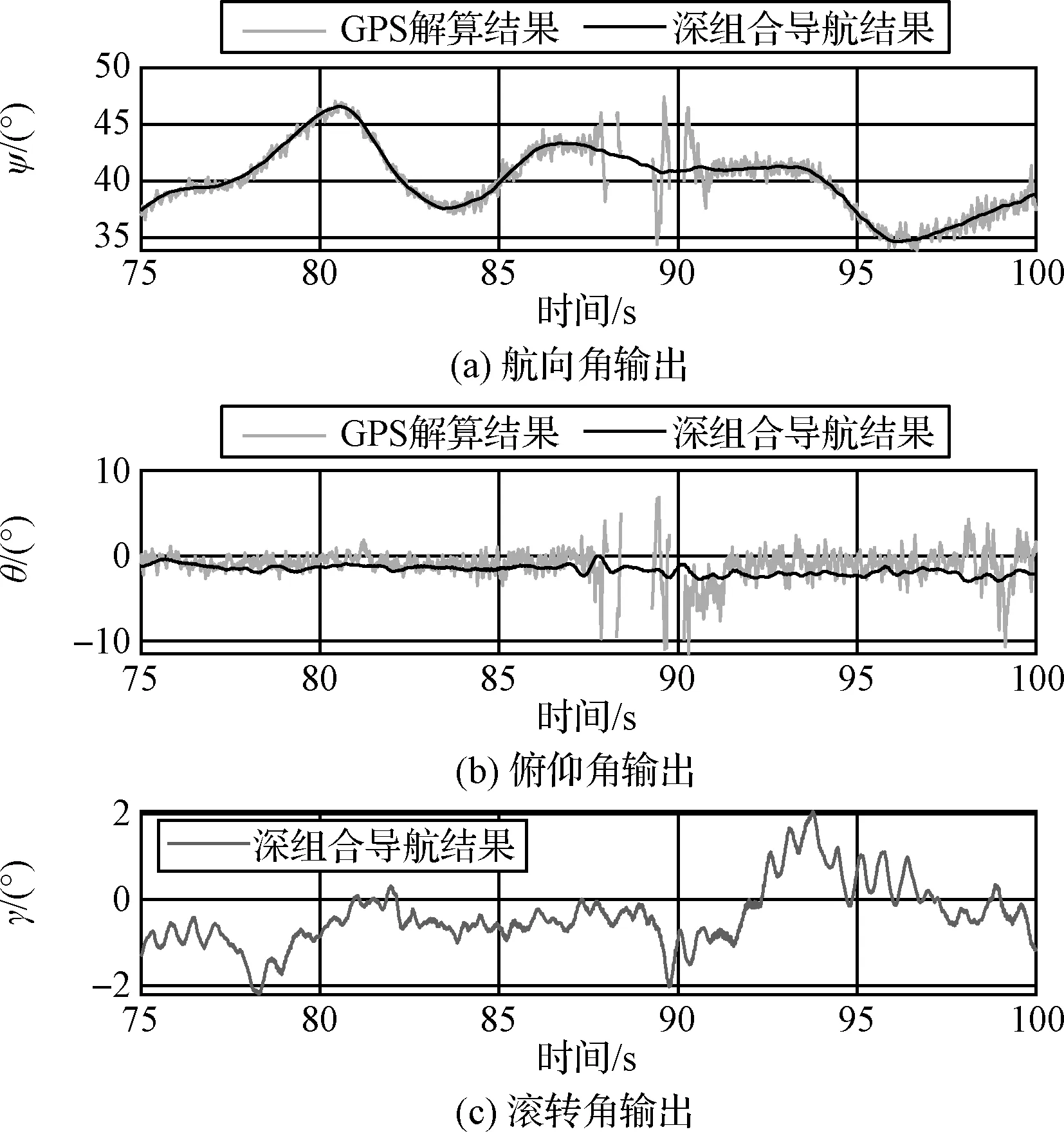
圖17 運(yùn)動(dòng)時(shí)GPS與深組合姿態(tài)輸出對(duì)比圖Fig.17 Comparison of attitude output between GPS and deeply-coupled navigation in the dynamic
圖18、圖19分別展示了第22顆GPS衛(wèi)星在不同信號(hào)狀態(tài)下的載波頻率跟蹤結(jié)果和導(dǎo)航電文輸出。395 s~398 s為強(qiáng)信號(hào)狀態(tài),導(dǎo)航電文清晰,由于鎖相環(huán)獨(dú)立運(yùn)行,進(jìn)行載波相位跟蹤和頻率測(cè)量,此時(shí)存在量測(cè)噪聲。398 s~401 s為弱信號(hào)狀態(tài),導(dǎo)航電文輸出存在波動(dòng),載波跟蹤進(jìn)入頻率輔助跟蹤模式,載波頻率由導(dǎo)航濾波器提供。401 s~406 s信號(hào)被遮擋,跟蹤環(huán)路失鎖,無(wú)導(dǎo)航電文輸出,載波頻率仍由導(dǎo)航濾波器提供,雖然不能鎖定相位,但可以保證頻率正確,406 s信號(hào)恢復(fù)時(shí)能很快重新鎖定。可以看出三種狀態(tài)之間過(guò)渡平滑,實(shí)現(xiàn)了橋接中斷信號(hào)的效果,所設(shè)計(jì)的跟蹤環(huán)路可以適應(yīng)信號(hào)強(qiáng)度的變化,提供了良好的載波跟蹤性能。
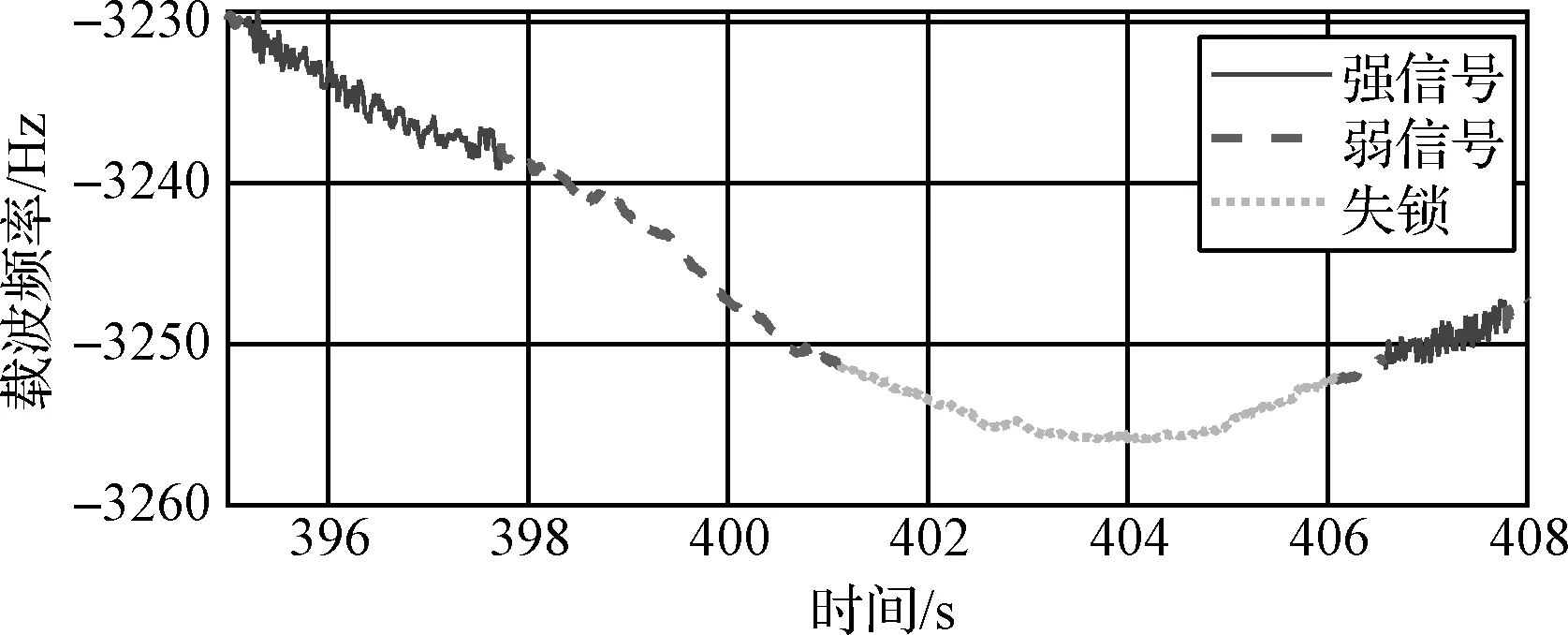
圖18 第22顆GPS衛(wèi)星載波頻率跟蹤曲線Fig.18 Carrier frequency tracking curve of NO.22 GPS satellite
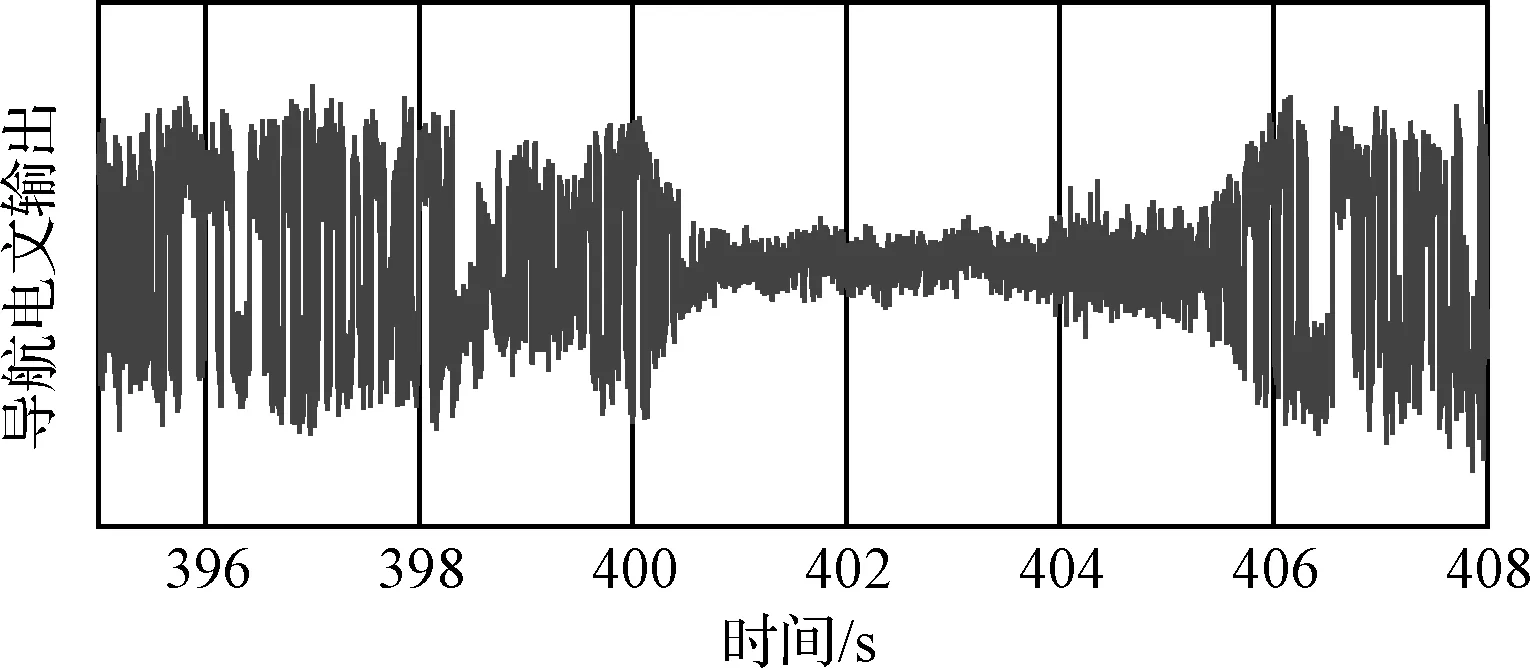
圖19 第22顆GPS衛(wèi)星導(dǎo)航電文輸出Fig.19 Navigation data output of NO.22 GPS satellite
5 結(jié) 論
本文將雙天線配置引入深組合導(dǎo)航系統(tǒng),解決了MEMS慣導(dǎo)/衛(wèi)星組合導(dǎo)航航向精度較差的問(wèn)題。根據(jù)信號(hào)強(qiáng)度設(shè)計(jì)了三種跟蹤結(jié)構(gòu),將質(zhì)量好的衛(wèi)星量測(cè)提供給導(dǎo)航濾波器完成導(dǎo)航修正,導(dǎo)航濾波器同時(shí)為弱信號(hào)通道提供跟蹤輔助,所有通道聯(lián)合處理,構(gòu)成矢量跟蹤環(huán)路,提高了跟蹤精度,避免了信號(hào)失鎖再恢復(fù)時(shí)的重捕獲操作。在導(dǎo)航濾波器相位差量測(cè)方程設(shè)計(jì)中,采用視線矢量水平投影變換解決了相位差俯仰量測(cè)不準(zhǔn)時(shí)的隔離問(wèn)題。通過(guò)復(fù)雜城市環(huán)境中的車載導(dǎo)航試驗(yàn),驗(yàn)證了所提出的矢量跟蹤環(huán)路在面對(duì)信號(hào)衰減和中斷時(shí)的連續(xù)跟蹤能力,實(shí)現(xiàn)了高精度、穩(wěn)定的導(dǎo)航輸出。雙天線GPS/MEMS深組合導(dǎo)航系統(tǒng)方案具有較強(qiáng)的工程實(shí)用價(jià)值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00