微納氣泡的三維動態(tài)表征
2021-02-23 01:46:26王淦誠何炳恩龔湘君
凈水技術(shù) 2021年2期
劉 俊,梁 霄,王淦誠,何炳恩,龔湘君
(華南理工大學(xué)材料科學(xué)與工程學(xué)院,廣東廣州 510640)
根據(jù)國際標(biāo)準(zhǔn)化組織(International Standardization Organization,ISO)定義,直徑<100 μm的氣泡稱為微納氣泡[1]。微納氣泡可附著于表面或存在于溶液中。研究表明,微納氣泡是熱力學(xué)不穩(wěn)定體系[2-3],一般傾向于上浮至水面破裂或溶解于水中。研究表明,直徑在1 mm以上的大氣泡會快速上浮并破裂,而微納氣泡的上浮則相對緩慢,且隨著尺寸的繼續(xù)減小,這種上浮趨勢甚至?xí)АF┤纾兄睆綖?0 μm的氣泡會以1 mm/s的速度上升[4],有時伴隨著在水中的溶解消失,而納米氣泡在水中做布朗運動,幾乎不會上浮,其在水中甚至可穩(wěn)定長達數(shù)天[5],這不能用經(jīng)典的拉普拉斯方程解釋[6-7]。氣泡破裂時會在其周身產(chǎn)生顯著的水動力,破裂能隨氣泡尺寸的減小而增大。微米尺度的氣泡在水中極少發(fā)生聚集[8],但是,一旦受到外部能量(如超聲波)的干擾,匯聚現(xiàn)象就會發(fā)生,并釋放可觀的能量,足以殺死細(xì)菌[9-10]。一般而言,微納氣泡在pH值為2~12的溶液中帶負(fù)電荷,這是水分子中OH-吸附在氣泡界面的結(jié)果。但是,通過添加電解質(zhì)[11]或表面活性劑[12],微納氣泡的表面電勢可以由負(fù)轉(zhuǎn)正。目前,研究者利用原子力顯微鏡發(fā)現(xiàn),固體表面的納米氣泡具有超大的接觸角,可降低附加壓力并延長其壽命[13]。然而,溶液中微納氣泡的產(chǎn)生及穩(wěn)定機理仍然不清楚。 因此,盡管微納氣泡已被廣泛應(yīng)用于礦物浮選[14]、污水處理[15]、采油[16]、土壤改良[17]等領(lǐng)域,但溶液中微納氣泡的基礎(chǔ)研究并不成熟,主要原因是缺乏合適的表征方法。表征微納氣泡,尤其是溶液中微納氣泡的難點有:(1)微納氣泡特別是納米氣泡,由于本身尺度小且極易受到擾動,很難被觀測;(2)難以區(qū)分尺度相近的雜質(zhì)顆粒和微納氣泡;(3)微納氣泡的局部可能具有高濃度,并可發(fā)生諸如聚集、破裂等復(fù)雜、快速的動態(tài)變化。
1 微納氣泡的表征方法
相對于其他的微粒,微納氣泡具有易受擾動、形態(tài)多變、粒徑分布寬、折射率比水小等物理特性。當(dāng)前存在多種微納氣泡的表征方法(表1),根據(jù)微納氣泡的物理特性,有測量微納氣泡粒徑及其分布的原子力顯微鏡法[18]、激光動態(tài)光散射法[19]、多波長消光法[20]、二維圖像法[21],其中,原子力顯微鏡法、二維圖像法和衍射法[22]還可以得到樣品的形貌,多波長消光法可以獲知樣品密度;有檢測高濃度微納氣泡樣品密度和成分的低場核磁法[23-24]。
原子力顯微鏡法利用由連接精密壓電陶瓷的精細(xì)探針探測pN~nN級別的原子力,并利用激光將原子力與探針的空間位置一一對應(yīng),可獲得納米尺度的三維形貌和精細(xì)的相互作用,并可得到測量對象的軟硬度。但是,該方法適合觀察表面附著的氣泡,不能獲得實時動態(tài)的數(shù)據(jù),無法觀察溶液中的氣泡[18]。
激光光散射方法主要用于獲知氣泡的尺寸分布[19],可分為動態(tài)光散射光強相關(guān)法、衍射法等。光強相關(guān)法的大致原理:當(dāng)激光照射到遠(yuǎn)小于其波長或接近其波長的小顆粒上,光會發(fā)生瑞利散射或米氏散射。由于小顆粒的布朗運動,散射光的強度隨時間波動并與顆粒在溶液中的擴散有關(guān),通過測量散射光強的時間相關(guān)性獲知顆粒的擴散特性,并對應(yīng)至顆粒的流體力學(xué)尺寸[25]。衍射法收集散射顆粒不同角度的散射光,得到其空間分布。根據(jù)米氏散射原理,從散射光強的空間分布中獲知其尺寸信息[22]。
二維圖像法[21],根據(jù)觀測對象的尺寸搭建具有一定放大倍數(shù)的可見光成像光路,對獲得的微氣泡圖像進行二值化、輪廓識別和計數(shù)統(tǒng)計,得到氣泡的粒徑分布。但是,所獲得的僅為二維信息,攝像機的景深導(dǎo)致圖像實際為沿光軸方向一定距離的氣泡在物平面的投影,從而導(dǎo)致各種計算偏差,在高濃度下由于三維軌跡的二維投影重疊,難以獲得實際軌跡,受限于衍射極限,該方法只能觀測微米尺寸的顆粒,且不能分辨顆粒的材質(zhì)。二維追蹤法是二維圖像法的另外一種應(yīng)用,利用類似暗場照明的方法將溶液局部照亮,不斷拍照累積光路中散射顆粒的運行軌跡,利用圖像分析對這些軌跡進行二維追蹤,并計算均方末端距用于關(guān)聯(lián)顆粒的流體力學(xué)尺寸。
以上方法可準(zhǔn)確測量微納氣泡的尺寸及分布,但均需要積累一段觀測時間來獲取有統(tǒng)計意義的數(shù)據(jù);同時,除去尺寸信息(衍射法基于靜態(tài)光散射,可獲知規(guī)則物體的形狀信息,譬如桿狀、球狀等),很難得到氣泡局部的形貌特征和局域變化,亦無法分辨氣泡和其他雜質(zhì)。這些方法在高濃度應(yīng)用時亦存在問題。
此外,還有一些獨特的表征方法,譬如多波長消光法,計算顆粒的消光系數(shù)并結(jié)合Lambert-Beer定律,對消光譜進行反演,得到具有統(tǒng)計意義的氣泡粒徑分布[20],該方法光路簡單,可進行原位在線的測量;又如低場核磁法,利用氫原子的能級躍遷,可非接觸地獲得含氫流體的水分子遷移率等信息,可獲得高濃度下的納米氣泡濃度[23],并可粗略判斷氣體化學(xué)組成[24]。但是,這些方法仍然無法獲知局部的動態(tài)和物性信息。
綜上,常見的氣泡表征方法均有各自的優(yōu)勢,但仍存在多種共同的局限,即無法準(zhǔn)確、精細(xì)、全面地觀察局部變化和動態(tài)過程,難以獲知微納氣泡的形貌,以及不能區(qū)分與氣泡同等尺寸的雜質(zhì)。因此,發(fā)展了一種針對微納氣泡的三維動態(tài)成像技術(shù)——數(shù)字全息顯微術(shù)(digital holographic microscopy,DHM)[28-29]。它利用光的干涉,記錄多個微納尺度顆粒的實時全息圖像,并對其進行三維重建,獲取其運動軌跡、形態(tài)及相位,具有通量高、景深大、高精度、無損、包含材質(zhì)信息等優(yōu)點。該技術(shù)既可以觀測表面微納氣泡,亦可觀測體相微納氣泡。以下部分將詳細(xì)闡述如何利用DHM觀察微納氣泡,獲得多個氣泡的三維軌跡和相圖,并基于相圖中折射率的差異區(qū)分氣泡與其他固體微粒。

表1 氣泡的常見表征方法Tab.1 Common Characterization Methods for Bubbles
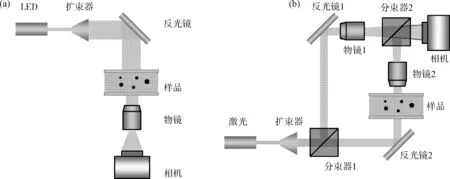
圖1 DHM光路圖 (a)共軸模式;(b)離軸模式Fig.1 Schematic of DHM (a) In-Line DHM; (b) Off-Axis DHM
2 數(shù)字全息顯微鏡
2.1 數(shù)字全息顯微鏡的原理
DHM源于傳統(tǒng)光學(xué)全息術(shù)[30],以數(shù)字形式,對全息圖像(即物體散射光場和已知相位的參考光場發(fā)生干涉,從而形成明暗相間的干涉條紋)進行記錄和處理,克服了傳統(tǒng)方法光學(xué)重建較為繁瑣且需用到化學(xué)記錄介質(zhì)的問題[31]。自主搭建了基于共軸和離軸光路的兩套DHM(圖1),分別以LED(λ=455/505 nm)和半導(dǎo)體激光(λ=473 nm)作為照明光源產(chǎn)生平面波。全息圖經(jīng)過顯微物鏡放大后,由sCMOS相機進行快速拍攝和記錄。結(jié)合高倍物鏡,數(shù)字全息顯微鏡的成像極限可以達到50 nm以下(金屬顆粒),用于細(xì)菌和顆粒追蹤時,它的軸向定位精度均在單顆粒以下[28-29]。其中,對于200 nm的Latex顆粒,其軸向定位精度在58 nm[28]。
記錄的全息圖用算法進行物體波前信息的重建,主要包括3個步驟:背景扣除、光場重建和局部尋峰。背景扣除是對一組連續(xù)拍攝的原始全息圖像[圖2(a)]進行平均處理,生成背景全息圖,然后對每一張原始全息圖進行背景圖的扣減[圖2(b)],這樣可以去除表面雜質(zhì)和光路缺陷所引入的干擾信號。光場重建使用的是瑞利-索末菲(Rayleigh-Sommerfeld,RS)反向傳播法[32](共軸DHM)及角譜法(離軸DHM)[33]。RS反向傳播法基于衍射的球面波理論,即重建像平面內(nèi)任一點的復(fù)光場E(x,y),等于全息圖平面∑0內(nèi)每一個點(x0,y0)發(fā)出的球面波在傳播水平距離z后在點(x,y)處的疊加。
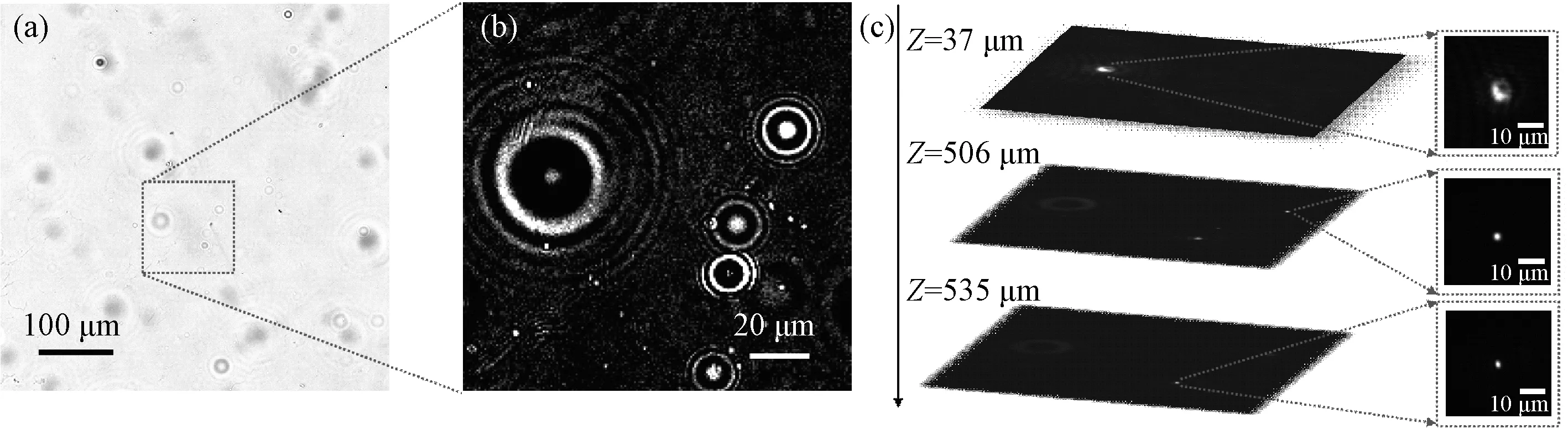
圖2 (a) 微納氣泡的全息圖;(b) 扣減背景后的全息圖;(c) 重建過程Fig.2 (a) Hologram of Microbubbles; (b) Hologram with Background Subtracted; (c) 3D Reconstruction
(1)
式(1)寫成卷積形式為式(2)。
E(x,y)=E0(x0,y0)?h(x,y)
(2)
由卷積定理,式(2)可以進一步表示成式(3)~式(5)。
E(x,y)=F-1{F{E0(x0,y0)}·F{h(x,y)}}
(3)
k=kx2+ky2+kz2
(4)
(5)
其中:E(x,y)——光場分布;
k——波數(shù),m-1;
l——光傳播距離,m;
h(x,y)——Rayleigh-Sommerfeld 傳播函數(shù);
F-1和F——傅里葉逆變換和傅里葉變換。
重建的三維光場由豎直方向上的一疊一定間隔的二維圖層組成[圖2(c)],并從式(3)中求得光強的三維分布。為獲得目標(biāo)物的三維位置和形態(tài),先設(shè)定一個閾值,過濾掉光場中和樣品無關(guān)的低值噪音;然后,再用一個邊長為w的正方體對重構(gòu)空間進行分割和逐點搜尋,找到局部光強最大值點,并標(biāo)記為樣品顆粒的可能位置,w值的選取與樣品本身尺寸和密度有關(guān);之后,基于這些可能的位置,進一步利用空時一致性進行位置的連接,得到被追蹤物體的實時三維軌跡。基于樣品的軌跡,可以進一步提取物體在其三維位置上的聚焦面形態(tài)[圖2(c)],并分析近界面處微粒的密度分布、三維速度、運動取向,以及與表面的碰撞概率等動態(tài)信息[28,34]。為獲得目標(biāo)物的形態(tài),根據(jù)樣品的三維坐標(biāo),提取該位置的光場截面圖像。
離軸全息(off-axis DHM)由于沒有孿生相的干擾,可用于精確復(fù)原目標(biāo)物體的位相。基于角譜法[式(6)]恢復(fù)離軸全息圖的位相。角譜法的理論基礎(chǔ)是衍射的平面波理論,衍射的平面波理論認(rèn)為,重建面的光場分布是沿不同方向傳播的多束平面光波矢量疊加的結(jié)果,遵循的赫姆霍茲方程可在頻率域下準(zhǔn)確描述光波的衍射過程。頻率域和空間域的轉(zhuǎn)換可以通過二維離散傅里葉變換和傅里葉逆變換來實現(xiàn)[33]。氣泡的折射率比水小,而一般雜質(zhì)的折射率比水大,因此,前者與背景介質(zhì)的位相差為負(fù)值,后者則為正值,可用于作為區(qū)分氣泡和其他雜質(zhì)的標(biāo)準(zhǔn)[35]。

(6)
其中:A0——全息面的角譜。
對樣品的復(fù)振幅分布E(x,y)求反正切,即可獲得其相位分布φ(x,y),即光程差,其對應(yīng)目標(biāo)顆粒物的形態(tài)分布,如式(7)。
(7)
其中:φ(x,y)——相位分布;
Im——函數(shù)虛部;
Re——函數(shù)實部。
離軸全息適用于表面微納氣泡的觀測,它的橫向和縱向分辨率分別為100 nm和10 nm。
2.2 數(shù)字全息顯微鏡的應(yīng)用
基于景深大、通量高、無須標(biāo)記等優(yōu)點,數(shù)字全息顯微鏡(DHM)被廣泛應(yīng)用于粒子追蹤和三維成像領(lǐng)域。不同于非生命顆粒,生物細(xì)胞通常會對環(huán)境變化產(chǎn)生主動響應(yīng),并隨之改變運動行為,這些對常規(guī)檢測手段來說不易捕捉的信息往往蘊涵著重要的價值,可以被DHM輕松記錄和再現(xiàn)。使用DHM追蹤生物實體最大的優(yōu)勢在于它自帶標(biāo)記屬性,有利于保持樣品顆粒最原始的生理狀態(tài)。Heydt等[36]使用同軸全息研究了石莼游動孢子在3種不同化學(xué)修飾表面的著陸行為并對其運動模式進行了區(qū)分。經(jīng)過定量化分析,發(fā)現(xiàn)孢子的運動模式和表面化學(xué)性質(zhì)息息相關(guān),同時認(rèn)為附著孢子在表面的旋轉(zhuǎn)運動是其探索和選擇定植表面位點時所采取的感應(yīng)策略。Maleschlijski等[37]利用全息獲取了數(shù)百條不同化學(xué)表面上藤壺幼蟲的運動軌跡,并將其歸類為5種運動模式,包括螺旋運動(spiralling)、游動(swimming)、下沉(sinking)、旋轉(zhuǎn)(rotating)、行走(walking)。這一工作有助于理解藤壺幼蟲游動行為和表面選擇的關(guān)聯(lián)性,可助力研發(fā)和設(shè)計新的防污涂層。Sheng等[38]運用DHM探究了2種尺寸相當(dāng)?shù)蝿犹卣骱蜖I養(yǎng)類型不同的鞭毛藻對獵物的響應(yīng)行為。結(jié)果顯示,混亂分布的2種鞭毛藻在引入獵物后都會發(fā)生簇?fù)憩F(xiàn)象,并表現(xiàn)出復(fù)雜多變的泳動行為。游速慢混養(yǎng)型的K.veneficum面對獵物時速度、螺旋半徑和螺距會減小,但角速度會增大;而游速快異養(yǎng)型的P.piscicida采取的捕食策略是增大游速、螺旋半徑和角速度,略減小螺距。Choi等[39]利用DHM技術(shù)測量了圓形微管中流動人體血紅細(xì)胞的3D體積速度場。細(xì)胞的形態(tài)特征是其生理狀態(tài)的反映,運用離軸全息可以重建細(xì)胞的三維輪廓,從而定量評估細(xì)胞形態(tài)參量與其生理狀態(tài)的聯(lián)系。Rappaz等[40]借助離軸DHM測量了單個紅細(xì)胞的折光率,并定量計算了正常紅細(xì)胞和乙醇固定紅細(xì)胞整個表面的細(xì)胞膜波動幅度,分別為(35.9±8.9)nm和(4.7±0.5)nm。該方法為紅細(xì)胞動力學(xué)提供了新的見解,有望進一步用于探究生理和藥理效應(yīng)物對紅細(xì)胞的作用。Nygate等[41]運用離軸DHM和深度學(xué)習(xí)的方法實現(xiàn)對精子細(xì)胞的虛擬染色和形貌分析。該方法可以節(jié)省寶貴的樣品處理時間,規(guī)避化學(xué)染料可能帶來的毒副作用,同時對多種類型的細(xì)胞進行區(qū)分著色,在臨床醫(yī)療研究中有著重要的應(yīng)用價值。Wilson[42]以孤立鞭毛的P.berghei雄配子為研究模型,使用高速DHM首次揭示了此類微生物的三維鞭毛波形,推翻了鞭毛動力學(xué)與其分子結(jié)構(gòu)(手性)存在關(guān)聯(lián)的錯誤認(rèn)知,得出了微生物的附屬動力結(jié)構(gòu)對鞭毛節(jié)拍有著不可忽視影響的推論。PHI[43]、IPRASENSE[44]、Ovizio[45]等公司先后開發(fā)了無透鏡緊湊型的DHM系統(tǒng),其體積小巧,可放置于培養(yǎng)環(huán)境下用于進行細(xì)胞的形態(tài)觀測。Lyncee Tec[46]公司開發(fā)的離軸型DHM被用于觀察光學(xué)元件缺陷和表面精細(xì)結(jié)構(gòu)及應(yīng)力變化。然而,截至目前,DHM尚無商業(yè)化的儀器應(yīng)用于做顆粒和氣泡的三維觀測和追蹤。
本課題組利用自主搭建的DHM,立足于解釋微生物的動態(tài)黏附機理和優(yōu)化DHM定位追蹤算法,開展了一系列研究工作。首先,細(xì)菌在界面附近的三維運動和黏附是一個連續(xù)、統(tǒng)一的過程,對細(xì)菌黏附于不同性質(zhì)表面之前的近界面三維運動行為進行追蹤和還原可為細(xì)菌的界面黏附機制提供更多的線索和詮釋角度。Qi等[28]觀測了不同電荷性質(zhì)和親疏水性的聚合物表面上大腸桿菌的三維動態(tài)行為,發(fā)現(xiàn)疏水表面會降低細(xì)菌的游速,這是細(xì)菌鞭毛碰撞到表面即尾部碰撞的結(jié)果,且細(xì)菌與疏水表面發(fā)生尾部碰撞時持續(xù)時間更長,細(xì)菌自身的推進力是影響其黏附的重要因素。結(jié)合碰撞模型,定量估算細(xì)菌通過鞭毛與表面發(fā)生尾部碰撞,進而產(chǎn)生黏附的臨界吸引力值,為0.008 nN/μm;對于具有不同降解速率的聚己內(nèi)酯均聚物、共聚物形成的“動態(tài)表面”,認(rèn)為細(xì)菌黏附的不同主要取決于兩方面的因素:一是細(xì)菌與“動態(tài)表面”基底的黏附力更弱,二是細(xì)菌對小分子降解產(chǎn)物具有趨化排斥反應(yīng),傾向于逃離表面[34]。Peng等[47]指出,大腸桿菌和海洋菌銅綠對不同軟硬度的聚二甲基硅氧烷表面具有主動響應(yīng)性,細(xì)菌在較軟的表面上出現(xiàn)更多的tumble(翻滾)和flick(輕敲)等特征運動,RNA轉(zhuǎn)錄組測序的結(jié)果也進一步驗證了這一結(jié)論。Huang等[48]研究了微米尺度的表面形貌對人體精子運動行為的影響,結(jié)果表明,流體力學(xué)作用力是調(diào)控細(xì)菌運動的主要因素。粗糙度的增大不利于精子的遷移,具體表現(xiàn)為精子的軸向振蕩增強,運動速度出現(xiàn)衰減,運動朝向角分布更寬,運動模式中的helical、hyperactivated 和hyperhelical 所占比例下降。有趣的是,當(dāng)表面特征形貌與精子尾部尺度一致時,精子可以通過尾部的擺動來抵抗表面形貌對它的調(diào)控。
DHM雖適用于各種材質(zhì)和形狀的樣品,但不同種類的樣品,如納米顆粒、細(xì)胞和細(xì)菌,由于運動特性的不同,對DHM三維定位精度的要求也各不相同。同時,高濃度下的粒子追蹤一直以來是一大難題。因此,為了推廣DHM的微觀應(yīng)用場景,進行了定位追蹤算法的改進和優(yōu)化。Huang等[29]將基于數(shù)值重建的高斯軸向擬合算法引入DHM中,提高了不同記錄條件下算法的軸向定位精度。數(shù)據(jù)表明,算法定位精度受到物鏡放大倍數(shù)、入射光強度和光照均勻度的影響,優(yōu)化后的軸向定位精度對大腸桿菌和PLPs(0.2 μm)分別可以達到318 nm和58 nm;之后,又利用基于圖像光強的軸向定位算法實現(xiàn)了近界面高精度定位。Wang等[49]開發(fā)了一種高濃度下基于成本函數(shù)和圖像識別的連接軌跡片段的算法,用以研究細(xì)菌在游走過程中感應(yīng)到鄰近同伴后的運動行為變化。該算法在細(xì)菌濃度低于3×107mL-1時準(zhǔn)確率高于96%,對樣品形狀無特殊要求,可進一步應(yīng)用于顆粒、氣泡等體系。
DHM盡管有著數(shù)十年的發(fā)展歷史,目前用于科學(xué)研究居多,商業(yè)化的產(chǎn)品則較為少見。為了進一步發(fā)揮DHM的商業(yè)價值,在未來,它將朝著小尺寸、無透鏡、大視野、可快速重建等研究方向發(fā)展。
3 微納氣泡的三維表征與結(jié)果討論
Tian等[50]利用激光同軸全息可得到1 cm見方范圍內(nèi)大量微米氣泡的尺寸和三維分布。Shao等[51]提出了一種混合氣泡全息圖處理方法,用于在1 cm見方的大范圍內(nèi)測量微米、亞毫米和毫米氣泡的尺寸和三維分布。Hall等[52]利用同軸全息觀察了水面濺起的小液滴。然而,尚無一種方法將大量氣泡的三維定位與追蹤觀察相結(jié)合,并同時得到氣泡的尺寸、形態(tài)、三維位置和相圖(材質(zhì))的信息。基于此,利用自建的DHM,觀察了表面活性劑穩(wěn)定的微納氣泡的三維動態(tài)行為。
微氣泡由攪拌槳攪拌加入0.008%表面活性劑十二烷基苯磺酸鈉的超純水產(chǎn)生,表面活性劑用以降低氣泡所受的附加壓力,從而使氣泡穩(wěn)定[53],包含微納氣泡的該液體經(jīng)內(nèi)徑為0.6 mm的軟細(xì)管由蠕動泵注入并導(dǎo)出至干凈的玻璃觀察皿。該觀察皿使用食人魚洗液(70%濃硫酸與30%過氧化氫溶液的混合液)進行預(yù)處理,增強表面的親水性。在觀察皿中制造厚度約2 mm的水層進行觀察。利用被攝物散射單色光產(chǎn)生的干涉現(xiàn)象,得到包含被攝物三維位置信息的全息圖,計算得扣減背景的全息圖,由Rayleigh-Sommerfeld算法進行三維重建,并得到氣泡的三維位置和尺寸大小,如圖3(a)所示。
在獲得了一段時間視場內(nèi)多張全息圖的基礎(chǔ)上,通過局部尋峰算法,結(jié)合氣泡運動的空時一致性,獲得一定時間段內(nèi)源源不斷進入視場中的大量微氣泡的三維位置和尺寸(圖3)。圖3(a)為一個瞬間視野體積內(nèi)所有氣泡的尺寸和位置分布。由圖3(a)和圖3(b)可知,80%以上的微納氣泡集中在6 μm以下,越小的氣泡數(shù)量越多。對30 s內(nèi)通過視場的部分氣泡進行軌跡追蹤,結(jié)果如圖3(c)所示,可見氣泡的流向一致,水流速度漸慢導(dǎo)致后進入視場的氣泡速度下降。全體軌跡在z方向的平均上浮速度為7.56 μm/s,但由于人造水平流場,出現(xiàn)了部分氣泡在z方向下沉的結(jié)果。
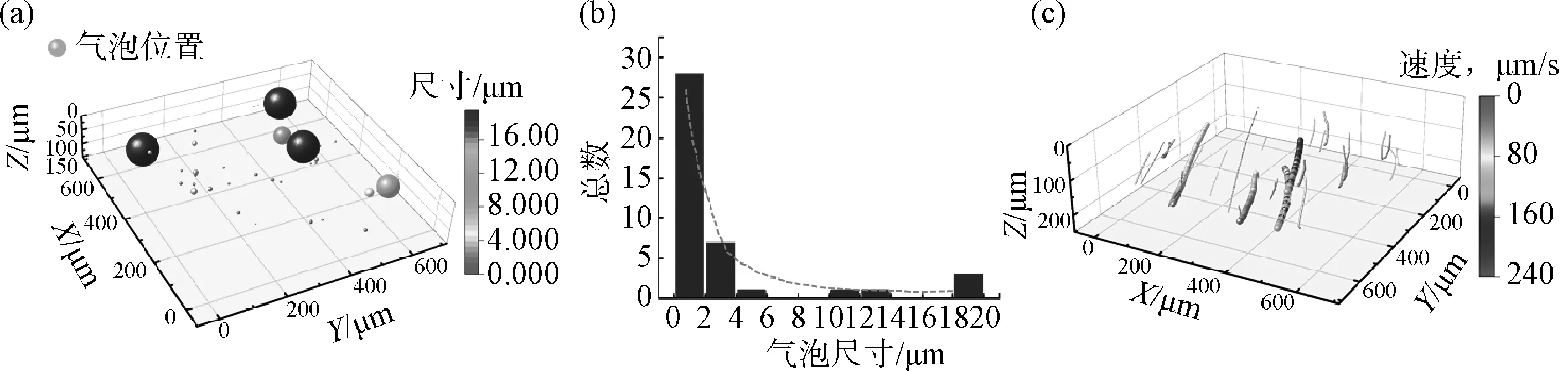
圖3 (a)微納氣泡的三維分布;(b)尺寸分布;(c) 三維運動軌跡Fig.3 (a) 3D Distribution of Microbubbles with Distinct Sizes; (b) Size Distribution; (c) 3D Trajectories
進一步將氣泡發(fā)生裝置置于離軸DHM光路中,以獲得水體中微氣泡的相位信息。對獲得的微氣泡全息圖[圖4(a)],使用角譜法進行圖像的三維重建,得到水中氣泡的相位差圖[圖4(b)],相移恰是由于空氣與水折射率不同產(chǎn)生的光程差。相對于水相為負(fù)的相移表明通過該物質(zhì)使光程減小,故該物質(zhì)的折射率小于水,與空氣折射率小于水的實際情況一致[35]。
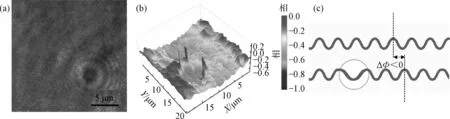
圖4 (a)一個微納氣泡的離軸數(shù)字全息圖;(b) 相差圖;(c) 氣泡存在導(dǎo)致相差為負(fù)的原理圖Fig.4 (a) Hologram of a Microbubble by Off-Axis DHM; (b) Phase Difference Map;(c) Schematic for Negative Phase Deviation Caused by a Bubble
4 結(jié)論
針對現(xiàn)有微納氣泡表征手段存在的問題,發(fā)展了基于數(shù)字全息顯微鏡的無損、高通量的微納氣泡三維表征技術(shù),獲取了多個氣泡的實時三維軌跡和相圖,為進一步分析氣泡的尺寸和密度分布、局部動態(tài)變化過程以及區(qū)分相近尺度的氣泡和雜質(zhì)顆粒奠定了基礎(chǔ)。在未來,將進一步提升數(shù)字全息顯微鏡的定位和位相解析精度,并設(shè)計針對高濃度多重散射干擾的三維重建算法,同時基于機器學(xué)習(xí)等算法,提高計算重構(gòu)的速度。該技術(shù)將有望從新的角度揭示微納氣泡在溶液中的動態(tài)行為和物理化學(xué)特性,從而更好地指導(dǎo)微納氣泡的實際應(yīng)用。
