基于嚴格解析譜的多接收子陣合成孔徑聲吶CZT 算法*
2021-02-25 06:27:36馬夢博鐘何平
計算機與數字工程 2021年1期
關鍵詞:信號
姜 濤 馬夢博 鐘何平
(1.海軍工程大學科研學術處 武漢 430033)(2.海軍工程大學海軍水聲技術研究所 武漢 430033)
1 引言
由于水中聲速較低,廣泛應用于合成孔徑雷達(SAR)領域的“停走停”假設在合成孔徑聲吶(SAS)不再成立[1],需要建立“非停走停”模型,而實用的SAS 一般采用多接收子陣技術[2]。“非停走停”和收發分置模式導致每一收發陣元對的距離歷程是雙根號之和形式,難以求解點目標響應二維譜解析表達式,從而對使用基于傅里葉變換的快速成像算法帶來不利[3]。
文獻[4]借鑒順軌雙基地SAR精確二維譜的求解方法[5~6],重新建立了“非停走停”模式下的多接收子陣SAS距離史幾何模型,并對其二維譜進行了精確推導。然而,由于精確的二維譜表達式非常復雜,文獻[4]只將其應用于RD算法,RD算法中距離徙動校正(RCMC)需要用到插值操作,算法效率很低。
本文首先建立了“非停走停”模式下的多接收子陣SAS回波距離史模型,然后給出了點目標的精確二維譜。分析RCM 空變性后發現,RCM 非常接近斜距變量的線性函數,而RCMC是對回波信號包絡的校正,只要校正誤差不超過一個距離分辨單元即可,所以可將復雜的RCM 做一定近似,使其變為斜距變量的線性函數,然后利用Chirp-z變換[7~10]進行RCMC,從而避免了插值運算,提高了算法效率,保證了相位保真度。仿真實驗表明:基于嚴格解析譜的CZT 算法成像精度在近距離處優于基于DPC近似[11]的CZT算法。
2 多接收子陣SAS回波信號
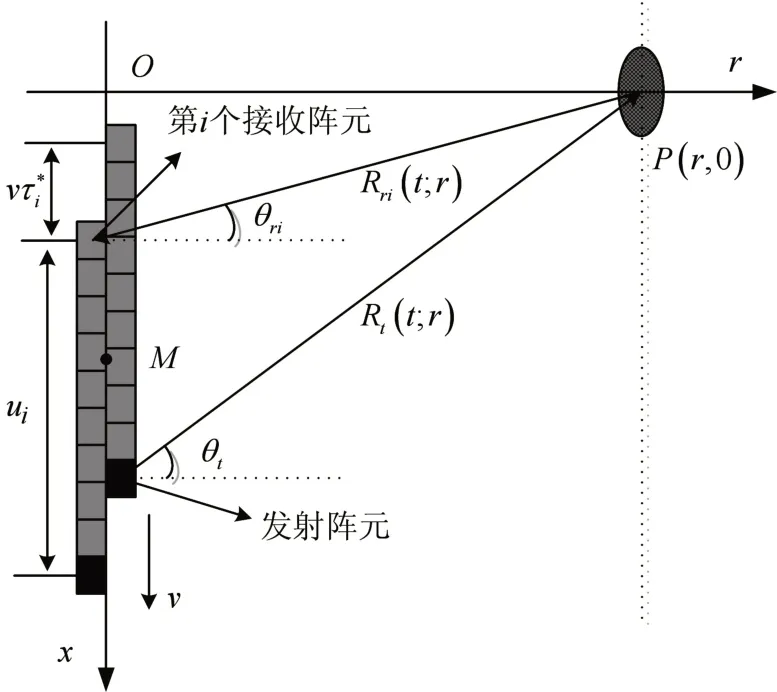
圖1 多接收子陣SAS幾何模型
多接收子陣SAS 幾何模型如圖1 所示,坐標軸定義如下,r軸表示距離向(斜距),x軸表示方位向,平臺沿方位向以速度ν勻速直線運動。假設海底為理想平面,任意點目標為P(r,0 ),在“非停走停”模式下,發射陣元(黑色方塊)以頻率PRF 發射脈沖信號,脈沖信號經點目標反射后被N個接收陣元(灰色方塊)接收,M點表示發射陣元與第i個接收陣元的中點,θt和θri分別表示發射時刻和第i個接收陣元接收時刻的斜視角。ui表示發射陣元與第i個接收陣元的距離,表示脈沖發射到被第i個接收陣元接收這段時間內平臺移動的距離。x=νt表示t時刻M點的位置,則發射陣元、第i個接收陣元與點目標的距離可分別表示為
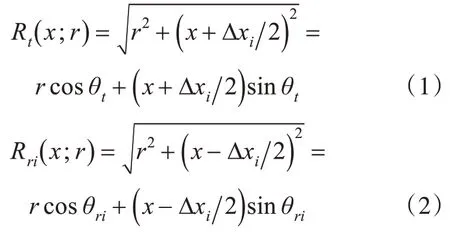
則第i個接收陣元距離史為
假設發射信號為線性調頻脈沖信號,則第i個接收陣元接收到的回波信號基帶形式可以表示為
其中f0表示發射脈沖信號中心頻率,Kr表示發射脈沖信號的調頻斜率,ωr(τ)表示發射脈沖信號包絡,ωa(t)表示方位向天線方向圖,A表示幅度項,如無特別說明,后文公式推導忽略與成像質量無關的幅度項。
3 基于嚴格解析譜的CZT算法
3.1 波數域點目標響應二維譜
對式(4)進行二維FFT可得
其中Wr( · )表示發射信號頻譜包絡,fr為距離向基帶頻率,表示方位向波數,fa為方位向向多普勒頻率,表示距離向中心波數,表示距離向基帶波數,kR=k0+kr表示距離向波數。
根據文獻[4,12]可得半雙基角近似表達式為
由于半雙基角β一般很小,在窄帶條件下,可以近似認為β與距離向基帶波數kr無關,即

將式(6)中的根式展開成kr的冪級數,保留至項,則
時,式(12)中的高次項可忽略。
由于多接收陣SAS一般工作在正側視模式,且半雙基角β一般很小,所以條件(13)成立。忽略式(12)中高次項,并進行整理的到
式(14)中第一項為方位調制項,第二項為距離徙動項,第三項為距離壓縮項與二次距離壓縮項。由于距離徙動項是距離變量r的非線性函數,從而無法直接運用Chirp-z 變換進行距離徙動校正,所以必須首先對距離徙動項進行線性化處理。
3.2 距離單元徙動空變性分析
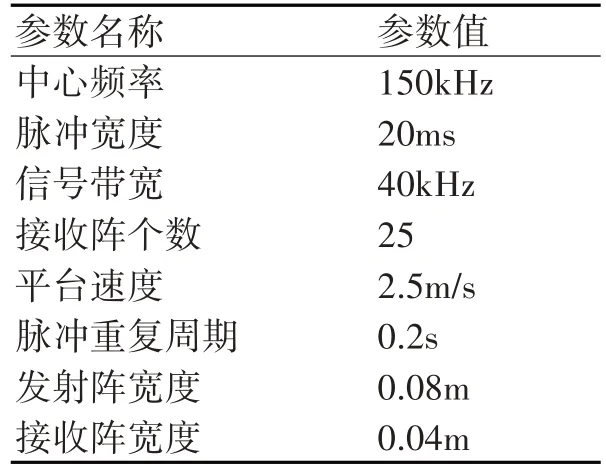
表1 仿真參數
記精確距離單元徙動為

式(15)中RRCM(kx,r)是方位向波數kx和距離變量r的函數,設聲吶參數如表1 所示,距離單元徙動RRCM(kx,r)隨r和kx變化如圖2(a)所示,陣元間距取最大值ui=1m。
由于β和D(kx)與距離變量r弱相關,且Δxi<<r,為使RRCM(kx,r)變為距離變量r的線性函數,不妨設近似距離單元徙動

其中rc表示參考距離,βc表示參考距離處的半雙基角,則 距 離 單 元 徙 動隨r和kx變化如圖2(b)所示。
定義式(15)與式(16)的近似誤差為ΔR,即

近似誤差 ΔR隨r和kx變化如圖2(c)所示。
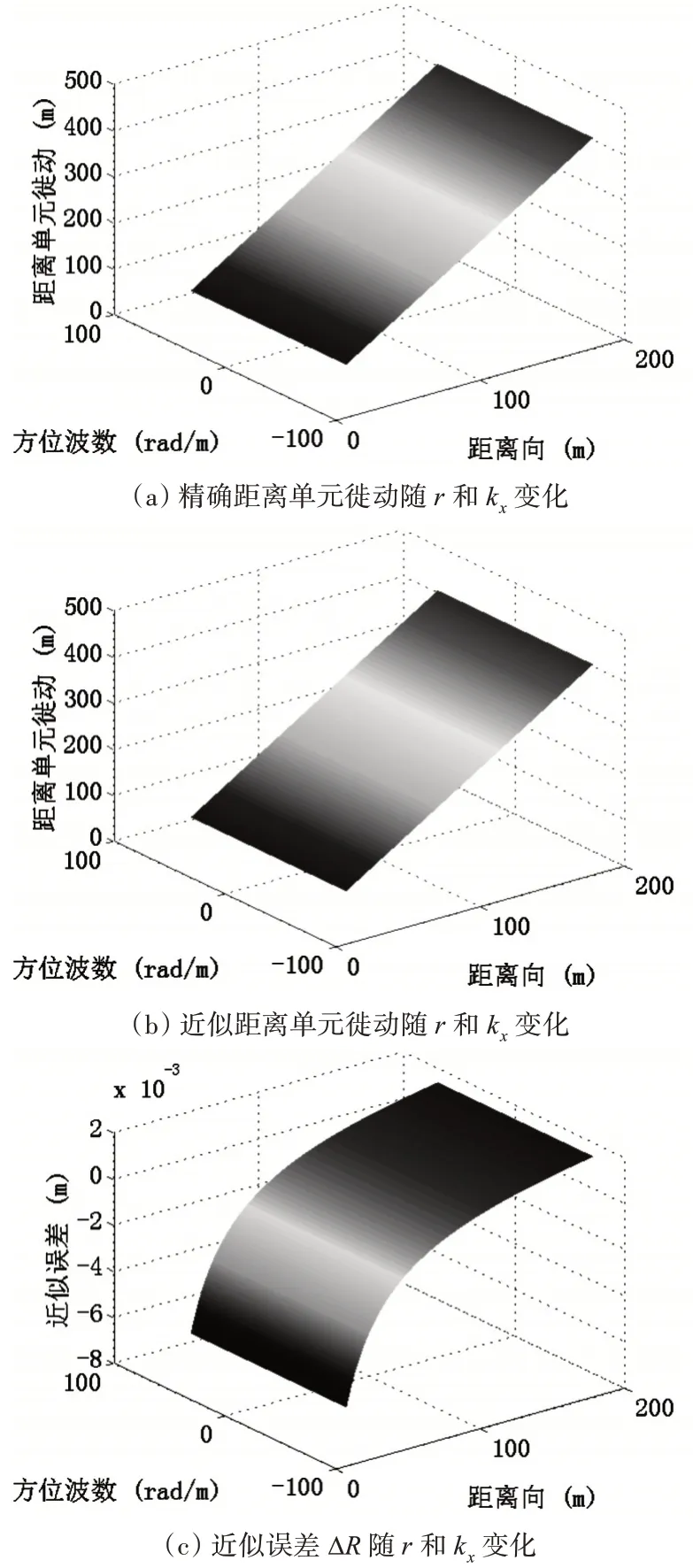
圖2 精確距離徙動與近似距離徙動比較
對比圖2(a)與圖2(b)可以發現,線性處理后的距離單元徙動與原始距離單元徙動RRCM(kx,r)變化規律幾乎一樣,兩者的差值,即近似誤差 ΔR反應在圖 2(c)中,從圖 2(c)中可以看出,近似誤差 ΔR遠小于一個距離分辨單元0.0187m,用線性處理后的距離單元徙動進行距離徙動校正可滿足成像要求。
3.3 基于嚴格解析譜的CZT算法流程
對于每一個接收陣元而言,方位向都是欠采樣的,但可以采用方位譜擴展方法,沿方位向對每個接收陣元的二維譜進行擴展。然后再利用傳統的收發合置CZT算法進行成像處理。具體步驟如下。
步驟1距離壓縮和SRC。該操作通常在二維頻域進行,但是由于該域不能同時表征距離和距離頻率,因此一般通過與一個參考距離處的參考相位相乘予以消除,參考因子為
步驟2利用Chirp-z 變換校正RCM。首先以參考距離對RCM進行一致補償,參考因子為
這一操作可以與步驟1 一起進行。此時二維譜可表示為
則式(21)可以寫成
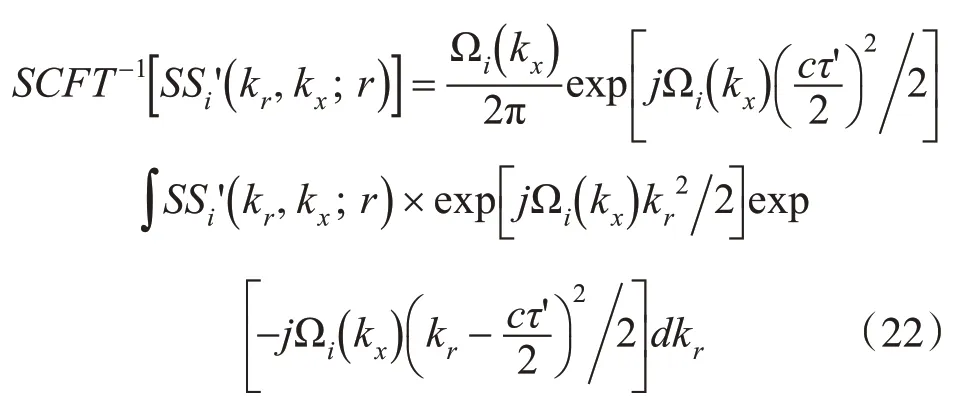
式(22)表明Chirp-z變換可以通過兩次相位乘和一次卷積完成,即二維譜先與進行復乘,然后與進 行 卷 積 , 最 后 與復乘。其中卷積操作可通過FFT快速實現。
步驟3方位壓縮和剩余相位校正。該操作通常在RCMC之后于RD域通過與一個距離空變的參考相位相乘予以校正,參考因子為

此時距離多普勒域信號可表示為

步驟4數據融合與方位IFFT。對所有接收陣元回波信號完成上述操作后,將其進行疊加,即

數據融合之后,經過方位向IFFT 回到二維時域即可獲得重建的SAS圖像。具體流程如圖3 所示。
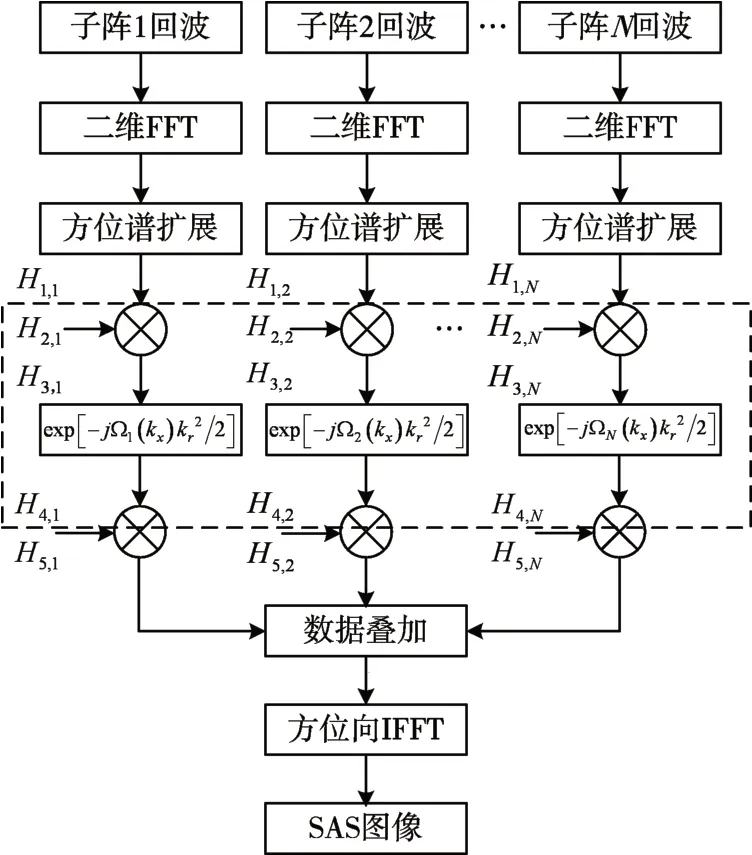
圖3 基于嚴格解析譜的CZT算法流程圖
4 仿真實驗
為驗證本文算法的正確性,下面對不同距離點目標進行仿真,仿真參數如表1 所示。在場景中的近距離和遠距離處分別設置一個點目標,坐標分別為(4 0,10 )和 (1 30,10 )。分別采用基于DPC 近似的CZT 算法和基于嚴格解析譜的CZT 算法進行成像處理,成像處理過程中方位向和距離向均不加任何窗函數,對于近距離點目標的成像結果如圖4 所示。
從圖4 中可以看出,對于近距離點目標,采用基于DPC 近似的CZT 算法和基于嚴格解析譜的CZT 算法得到的圖像在方位分辨率上沒有明顯差別,但采用基于DPC近似的CZT算法得到的圖像的旁瓣明顯高于采用基于嚴格解析譜的CZT 算法得到的圖像的旁瓣。
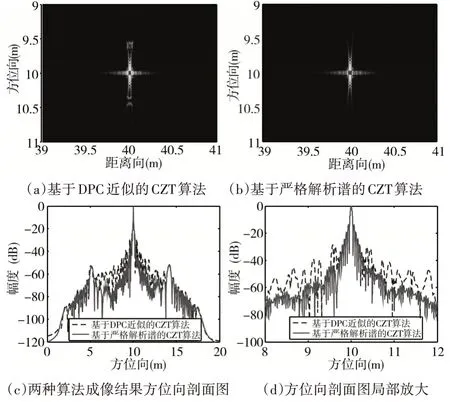
圖4 近距離點目標成像結果
對于遠距離點目標,成像結果如圖5 所示。
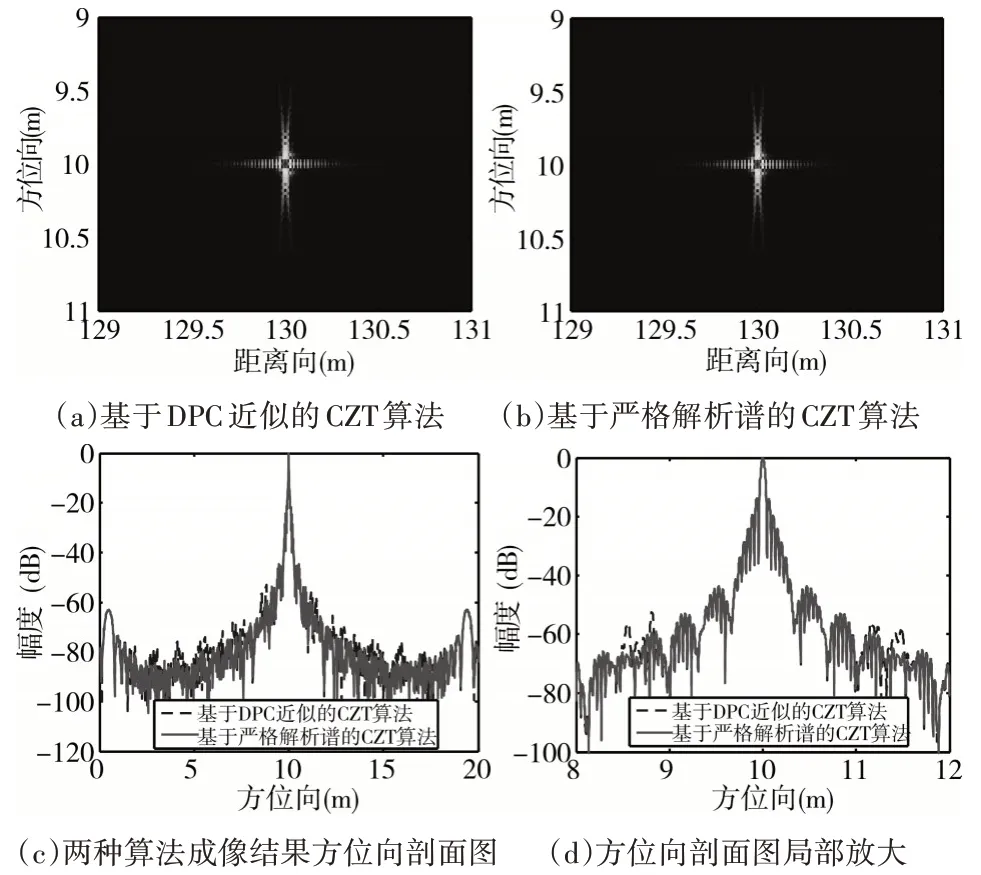
圖5 遠距離點目標成像結果
從圖5 中可以看出,對于遠距離點目標,采用基于DPC 近似的CZT 算法和基于嚴格解析譜的CZT 算法得到的圖像在方位分辨率上沒有明顯差別,但采用基于DPC近似的CZT算法得到的圖像的旁瓣還是略高于采用基于嚴格解析譜的CZT 算法得到的圖像的旁瓣。
綜合以上兩種情況不難發現,基于嚴格解析譜的CZT算法在方位分辨率方面沒有明顯優勢,其主要優勢體現在旁瓣上,尤其是在近距離處,這是由于DPC近似在近距離處誤差較大導致,而采用嚴格解析譜的方法則可以避免這種誤差。
5 結語
本文基于的嚴格解析譜,將其RCM 近似為斜距變量的線性函數,然后利用Chirp-z 變化校正距離徙動,進而提出基于嚴格解析譜的多接收子陣SAS CZT 算法,最后通過仿真實驗驗證了本文算法相對于基于DPC近似的CZT算法更加精確。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06