存在視覺盲區的小型無人機群自主控制*
2021-02-25 06:27:38李曉麗尹德斌
計算機與數字工程 2021年1期
趙 虎 李曉麗 尹德斌
(1.東華大學信息科學與技術學院 上海 201620)(2.數字化紡織服裝技術教育部工程研究中心 上海 201620)(3.上海工業自動化儀表研究院有限公司 上海 200030)
1 引言
近幾年來,無人機研究越來越引起國內外專家學者的關注,特別是對無人機的編隊控制的研究受到許多學者的青睞。隨著戰場環境的多變性和復雜性,單架無人機已經無法滿足現實的需求。為此,許多專家提出利用多無人機以協同的形式進行編隊飛行來執行任務。就目前來說,對于無人機的編隊飛行,前人已經提出了很多的方法,比如長機-僚機法,行為法,虛擬結構法,基于一致性的編隊控制方法,人工勢場法等;施書成[1]等根據長機-僚機方法設計了多無人機編隊協同保持的速度矢量場算法,并借鑒人工勢場的方法,引入相對速度矢量,從而保證了無人機群以相對穩定的速度進行飛行,并且具有防碰撞功能。周子為等[2]根據雁群的行為機制,提出了一種編隊重構拓撲方法。該方法能夠使得無人機緊密編隊,并且可以大大地減少無人機的耗油量。劉成功[3]等對無人機仿生緊密編隊飛行控制技術進行了研究,分析了候鳥編隊飛行原理,討論了無人機緊密編隊飛行的仿生機理,建立氣動耦合效應的緊密編隊飛行模型,并設計了基于小腦模型神經網絡與PID 復合控制的隊形保持控制器,通過仿真實驗結果表明所設計控制器的合理性。郭冬冬[4]等運用二階一致性的方法,通過對無人機協同編隊方法的研究,設計了二階有領航者的一致性控制算法,以及基于人工勢場法設計了群體控制算法,通過實驗驗證,該算法可以讓多個無人機跟隨領航者保持一定的隊形飛行。張佳龍[5]等人對基于改進人工勢場的無人機編隊避障控制研究,對人工勢場法在無人機避障過程中存在的局部最小值問題,利用了虛擬結構和長機-僚機控制控制策略,提出了一種三維空間復合矢量人工勢場方法,從而實現了無人機編隊飛行過程中能夠在三維空間避開障礙物的目的。除此之外,Lin,ZJ 等[6]通過對小型無人的研究,根據火災任務的需求,通過分布式編隊的方式,提出了一種基于一致性的無人機群合作方法,最后經過仿真驗證了該算法可以將無人機分組覆蓋到火線輪廓的不同部分,從而提高了救災效率。Feng 等[7]提出了一種基于一致性的均勻無人機群魯棒聚類和優化算法。該算法可以實現無人機群的自適應地集群并可以自適應的選擇一架無人機作為領航者。 林敏等[8]針對多智能體的時變問題,設計了一致性算法和具有避障功能的人工勢場法,從而使得僚機能夠跟隨長機穩定飛行。
論文的研究借鑒了雁群飛行編隊的行為。在雁群進行編隊飛行的過程中,大雁由于其生物體本身的特性,存在一定的視覺盲區。為此,本文根據這一問題,提出了一種基于視覺盲區的小型無人機自主控制算法,首先是構建了二階積分器系統模型,通過對無人機在視覺盲區和非視覺盲區的區別,設計代價函數進行刻畫視覺盲區和非視覺盲區,然后利用了梯度下降法以及以圖論作為理論基礎的速度一致性算法使無人機在避開彼此視覺盲區的基礎之上速度達到一致性,通過仿真實驗,最后驗證了所設計的控制器的合理性。
2 無人機編隊飛行的運動學分析
假設無人機現在飛行到O 點,此時無人機的俯仰角為βi,偏航角為θi,無人機的飛行速度為Vi。如圖1 所示建立無人機的地面坐標系,根據文獻[9]對于小型固定翼無人機的非線性動力學方程為

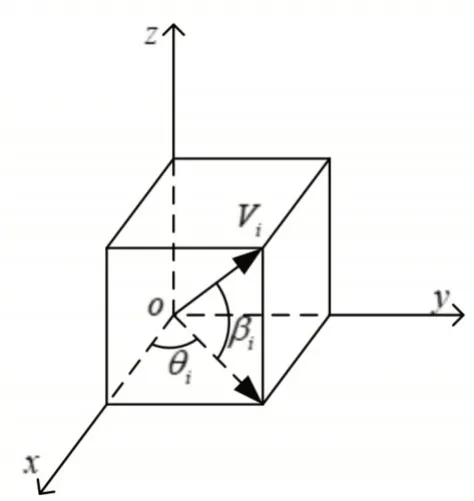
圖1 小型固定翼無人機飛行運動學模型
其中:Vi為無人機對地的飛行速度ai=[ai1,ai2,ai3]為無人機的加速度,ai1為無人機的切向加速度,其方向與無人機的速度方向一致,ai2為無人機的法向加速度的垂直分量,ai3為無人機的法向加速的水平分量,βi為無人機飛行時的俯仰角,θi為無人機飛行時的偏航角。如果令pi為無人機在某時刻的速度信息,qi為無人機在某時刻的位置信息,則:
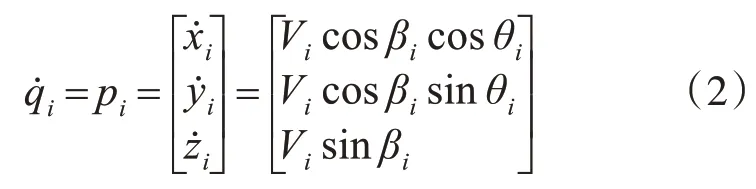
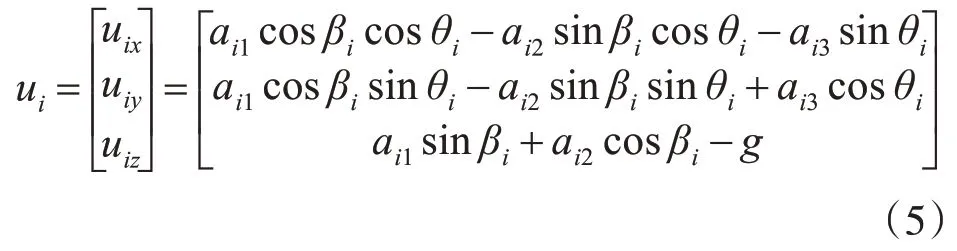
然后讓式(2)再對時間求導可得:


則式(3)可以表示為ui=k+Aiai,進而可以得到從變換中可以看出,可以將控制輸入ai=[ai1,ai2,ai3] 轉化為ui,從而可以令ui為新的控制輸入,設uix為無人機在x 方向上的加速度,uiy為無人機在y 方向上的加速度,uiz為無人機在z方向上的加速度,則新的控制器輸入可以表示為
則由此可以將系統狀態方程轉化為

上式中qi為第i個無人機的位置,pi為第i個無人機的速度,ui為無人機編隊時需要設計的新的控制輸入。在本文中,假設無人機群是在一個二位平面進行飛行,此時令俯仰角βi=0,z方向的控制輸入為零。
3 基礎理論
無人機群在編隊飛行過程中的通信問題可以用通信拓撲圖來描述,在一定的拓撲條件下,每個無人機都可以看成是圖中的一個節點,而圖中的邊可以看成是無人機之間的通信信息流。
假設G=(V,E)為無人機組成的網絡圖,其中V=[ν1,ν2,ν3,…,νn] 為 圖 中 的 節 點N={1 ,2,3,…,n} 為節點的序號,在實際中表示每架 無 人 機 ,E=(e1,e2,e3,…,en) 為 圖 中 的 邊 集E?V*V。M={1 ,2,3,…,n} 為圖中邊的序號,在實際中代表無人機在相互通信時的信息傳遞。若信 息 交 換 是 沒 有 方 向 性 的 ,則 有 (νi,νj)∈E?(νj,νi)∈E,那么此時圖 G 被稱為無向圖;若信息流只能從其中一個節點傳遞到另一個節點,反之不能傳遞,則此時稱圖G 為有向圖。此外,鄰接矩陣A=[aij] 為非負加權矩陣,當無人機νi有信息向無人機νj傳遞時,aij>0(本論文中規定當無人機νi有信息向νj傳遞時,aij=1),當無人機之間無信息傳遞時aij=0,所以此時A是由0-1 元素組成的一個非負加權矩陣。對于一個無向圖中的節點i,鄰接元素可以表示為Ni={νj∈ν|(νi,νj)?E}。假設圖的出度矩陣為D,易知矩陣D為斜對角矩陣,則此時該圖的拉普拉斯矩陣可以表示為L=D-A。
4 控制器的設計
4.1 代價函數的設計
在生物種群中,比如魚群的聚集,大雁的遷徙,都會按照一定的隊形進行排列,比如,大雁的遷徙,就會按照一定的人字形進行編排飛行,這樣在遷徙過程中大雁之間不僅會節省自身能量,而且也會方便領航者的交換和使每個大雁都能夠在各自的視覺之內飛行,這樣就方便了各自之間信息的傳遞。科學家根據這一生物學行為,將此場景應用到無人機的編隊飛行過程中。本文就是根據雁群在飛行過程中由于存在視覺盲區的特點來進行研究。因為無人機群在執行任務時也會存在盲區,所以需要進行避盲算法的設計。
首先,前面提到,無人機在編隊執行任務過程中,由于無人機之間有且僅有視覺上的通信,此時就需要各無人機之間保持在視覺盲區之外飛行,所以,為了刻畫視覺盲區和非視覺盲區,就需要設計相應的代價函數函數進行刻畫。
如圖2 所示,假設有兩架型號相同的小型無人機,分別為無人機j和無人機i,此時無人機j在二維平面時的坐標為(xj,yj),無人機i在二維平面時的坐標維 (xi,yi),無人機的盲角都為α(α< 90°),偏航角為θj,假設無人機j的機頭朝向的反向延長線與兩架無人機相對位置偏差的夾角為γij,則此時由文獻[12]可以到:


圖2 無人機視覺之間的幾何關系圖
由此可以看出,當 cos(γij)≥cos(α)時,無人機i在無人機j的視覺盲區之內,當 cos(γij)< cos(α)時,無人機i在無人機j的視覺盲區之外。由此可以設計代價函數為

當γij∈(0,α]時,函數hcos(γij)與γij的關系如圖 3 所示。則從式(8)可以看出,當γij=0 時,hcos(γij) 的值為無窮大,當γij∈(0 ,α]時,hcos(γij)的值從無窮大平滑地過渡到 0;γij>α時,hcos(γij)的取值為0。然而,對于小型無人機來說,其可視化的距離是有限的,所以為了使無人機能夠避免因隨時間變化而變化的鄰接集Ni(t)所帶來的代價函數產生的突變,此時需要定義一個緩沖函數ρ(dij),此緩沖函數可以使代價函數平滑可微,根據文獻[10]可以得到:


圖3 代價函數圖像
4.2 速度一致性項算法的設計
無人機在編隊飛行過程中,除了需要設計代價函數讓無人機在盲區之外飛行以外,也需要讓無人機保持速度一致性。所以在此就需要速度一致性算法的設計。
如果無人機j在[xj,yj]位置時的速度定義為pj,無人機i在位置 [xi,yi]位置時的速度為pi,則根據文獻[13~15]可以得到,要使得無人機群速度保持一致性,則需要滿足:

其中,aij是非負加權矩陣中的元素(在本文中aij=1)。這樣就可以保證無人機群按照相同的速度大小和相同的速度方向飛行。
4.3 控制器算法
無人機群在飛行過程中,要想飛離其他無人機盲區,就需要使無人機的代價函數為零,另一方面,無人機群在飛行過程中,需要保持速度一致性。根據文獻[14]可以得到:


其中,pxi和pyi分別表示無人機i在x方向以及y方向上的速度,pxj和pyj分別表示無人機j在x方向以及y方向上的速度表示無人機i的代價函數在x方向上的負梯度,表示無人機i的代價函數在y方向上的負梯度。下面,通過仿真來驗證所設計控制器的合理性。
4.4 仿真結果及分析
根據所提出的算法,進行仿真驗證,其中設四架無人機為同一型號無人機,盲角偏轉角為指向無人機飛行時的速度方向。
1)當無人機相互不再彼此的盲區之內如表所示。

表1 無人機的初始狀態1

圖4 無人機初始位置坐標圖
仿真結果如圖5~7所示。

圖5 無人機群的位置坐標

圖6 無人機x方向速度與時間的關系
因為無人機群在飛行的過程中,相互不在盲區之內,所以無人機按照初始時的速度和偏轉角度直線飛行。

圖7 無人機y方向速度與時間的關系
2)當初始狀態在盲區之內時如表2。

表2 無人機的初始狀態2

圖8 無人機初始時刻位置
則無人機飛行的仿真結果如圖9~11。

圖9 無人機群的位置坐標
通過仿真結果可以得到,當無人機在盲區之內飛行時,無人機之間通過所設計的算法成功避開了視覺盲區繼續飛行,并且速度最終達到一致性的效果。

圖10 無人機x方向速度與時間的關系

圖11 無人機y方向速度與時間的關系
5 結語
本文是基于生物體群體飛行的特征,以小型無人機為研究對象,因小型無人機自身負載小的原因無人機之間只能安裝魚眼鏡頭作為視覺上的通信,雖然魚眼鏡頭可以擴大視野范圍,然而仍存在視覺盲區,為解決這一問題,提出了使用代價函數對視覺盲區和非視覺盲區進行刻畫,利用二階積分器模型,根據代價函數的負梯度以及速度一致性得到無人機飛行控制器的實際的輸入。 最后通過Matlab仿真,驗證所設計控制器的合理性。然而本文只是考慮了使無人機避開盲區以及速度達到一致性,并沒有考慮到無人機的編隊和避障的需要。這一問題將在以后的研究工作中進行開展。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
計算機應用(2022年2期)2022-03-01 12:33:42
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
燕山大學學報(2015年4期)2015-12-25 02:19:49