一種改進(jìn)的民用GPS異步欺騙技術(shù)*
2021-02-25 04:17:28易曙明
電訊技術(shù) 2021年2期
關(guān)鍵詞:信號(hào)實(shí)驗(yàn)
易曙明,游 凌,李 顯
(1.信息工程大學(xué) 信息系統(tǒng)工程學(xué)院,鄭州450001;2.盲信號(hào)處理國(guó)家級(jí)重點(diǎn)實(shí)驗(yàn)室,成都610041)
0 引 言
隨著信息戰(zhàn)和導(dǎo)航戰(zhàn)成為新的作戰(zhàn)方式,針對(duì)民用GPS的欺騙成為了一個(gè)研究熱點(diǎn)[1-6]。目前民用GPS欺騙主要分為轉(zhuǎn)發(fā)式欺騙和生成式欺騙。其中生成式欺騙能夠根據(jù)欺騙意圖調(diào)整導(dǎo)航電文參數(shù),自主產(chǎn)生高精度導(dǎo)航信號(hào),對(duì)GPS接收終端具有更大威脅。
無論是轉(zhuǎn)發(fā)式欺騙還是生成式欺騙,由于擴(kuò)頻碼的相關(guān)特性,必須保證欺騙信號(hào)到達(dá)接收機(jī)天線處偽碼相位與真實(shí)信號(hào)對(duì)齊,才會(huì)影響接收機(jī)跟蹤狀態(tài)。因此根據(jù)信號(hào)是否同步有異步和同步兩種攻擊方式。異步攻擊的一種實(shí)現(xiàn)是通過大功率壓制使接收機(jī)進(jìn)入重捕獲,欺騙信號(hào)憑借功率優(yōu)勢(shì)誘捕。此種方式由于GPS系統(tǒng)的擴(kuò)頻處理增益以及改進(jìn),需要付出很高的功率代價(jià),逐漸變得難以實(shí)施。另一種攻擊方式最先出現(xiàn)在文獻(xiàn)[7]中針對(duì)直擴(kuò)通信相干干擾提出的靈巧干擾方法,通過改變信號(hào)偽碼速率,生成滑動(dòng)的靈巧干擾信號(hào),實(shí)現(xiàn)偽碼相位的自動(dòng)對(duì)齊。文獻(xiàn)[8]將該技術(shù)應(yīng)用于欺騙導(dǎo)航接收機(jī),并分析了成功欺騙的功率要求,在4 dB的欺騙增益下,可在最長(zhǎng)50 min破壞接收機(jī)的跟蹤狀態(tài)。文獻(xiàn)[9]采用偽碼滑動(dòng)技術(shù)欺騙處于跟蹤階段的接收機(jī),并盡量規(guī)避RAIM(Receiver Autonomous Integrity Monitoring)預(yù)警。文獻(xiàn)[10]研究了滑動(dòng)過程的功率控制,指出只要欺騙信號(hào)具有功率優(yōu)勢(shì)就可實(shí)現(xiàn)接收機(jī)的牽引,且欺騙功率不宜過大。文獻(xiàn)[11]將生成式欺騙應(yīng)用于無人機(jī)誘捕,采用壓制接入的方式實(shí)現(xiàn)了對(duì)無人機(jī)的誘捕。
由于生成式欺騙技術(shù)細(xì)節(jié)復(fù)雜,公開文獻(xiàn)雖對(duì)其進(jìn)行了不同程度的研究,但大多停留在理論分析和軟件仿真驗(yàn)證,實(shí)際環(huán)境的測(cè)試和驗(yàn)證缺乏;偽碼滑動(dòng)是解決碼相位同步的一種手段,但現(xiàn)有研究關(guān)注在成功欺騙的方法和功率條件以及欺騙策略上,未對(duì)信號(hào)參數(shù)對(duì)欺騙信號(hào)的功率影響進(jìn)行理論分析,且沒有考慮欺騙信號(hào)與真實(shí)信號(hào)的碼片超前滯后問題,導(dǎo)致欺騙起效時(shí)間具有不確定性。針對(duì)上述問題,本文通過對(duì)GPS欺騙問題建模,分析了欺騙信號(hào)和真實(shí)信號(hào)碼片誤差的影響因素,推導(dǎo)了信號(hào)參數(shù)對(duì)偽碼相關(guān)峰值的影響公式,針對(duì)碼片誤差較大情況下提出了多路并發(fā)滑動(dòng)的方法,并通過碼片誤差滯后擴(kuò)展解決了碼相位超前滯后模糊問題,與傳統(tǒng)單路滑動(dòng)技術(shù)對(duì)比,具有起效時(shí)間更短、欺騙更可靠的特點(diǎn)。
1 欺騙問題建模分析
1.1 欺騙模型
GPS欺騙的基本原理是使接收機(jī)解算錯(cuò)誤的偽距得到錯(cuò)誤的定位信息。構(gòu)造如圖1所示的欺騙場(chǎng)景。
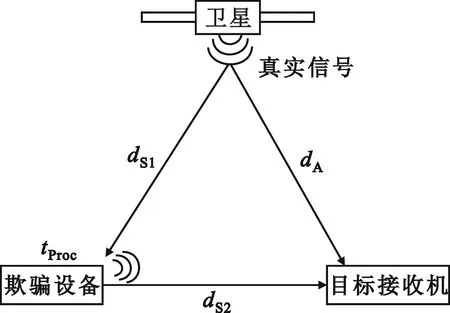
圖1 欺騙場(chǎng)景
依據(jù)文獻(xiàn)[12],偽距的篡改體現(xiàn)在傳輸時(shí)間上,而GPS接收機(jī)處理導(dǎo)航數(shù)據(jù)獲取衛(wèi)星信號(hào)發(fā)射時(shí)刻主要依靠Z計(jì)數(shù)、比特計(jì)數(shù)、CA碼整周計(jì)數(shù)和CA碼相位四步完成。因此欺騙設(shè)備在構(gòu)造欺騙信號(hào)的調(diào)整時(shí)延時(shí)可以將其體現(xiàn)在欺騙信號(hào)CA碼初始相位的超前和滯后上。
1.2 誤差分析
由1.1小節(jié)可知,欺騙設(shè)備的核心就是調(diào)整欺騙信號(hào)傳輸時(shí)間,對(duì)于生成式欺騙可以結(jié)合導(dǎo)航電文修改和欺騙信號(hào)CA碼初始相位的超前滯后實(shí)現(xiàn)欺騙信號(hào)、真實(shí)信號(hào)在目標(biāo)接收機(jī)處碼相位對(duì)齊。然而,要實(shí)現(xiàn)上述過程,每一環(huán)節(jié)都必須精準(zhǔn)無誤差,而事實(shí)上實(shí)現(xiàn)這一點(diǎn)是具有很大難度的。下面對(duì)欺騙信號(hào)初始碼相位調(diào)整過程中可能涉及的誤差做簡(jiǎn)單分析。
(1)對(duì)流層傳輸延遲
GPS信號(hào)在傳輸穿越對(duì)流層時(shí),傳輸路徑會(huì)由于對(duì)流層作用發(fā)生彎曲,從而使接收機(jī)解算位置時(shí)的距離測(cè)量產(chǎn)生誤差。對(duì)流層的延遲與衛(wèi)星的仰角密切相關(guān),一般在天頂方向時(shí)誤差為2~3 m,在水平方向時(shí),對(duì)流層導(dǎo)致的傳輸延遲可以達(dá)到約25 m。
(2)電離層傳輸延遲
GPS信號(hào)作為一種電磁波信號(hào),在大氣中傳輸穿越電離層時(shí)會(huì)存在一定的延遲。目前公開的研究資料表明,電離層對(duì)GPS的傳輸延遲體現(xiàn)在距離上誤差在天頂方向可達(dá)50 m,在水平方向可達(dá)150 m。
(3)衛(wèi)星時(shí)鐘誤差
GPS衛(wèi)星配備了高精度原子鐘,在工作過程中,相對(duì)而言比較穩(wěn)定,但仍然存在一定的時(shí)鐘偏差和頻率漂移。地面站在對(duì)各衛(wèi)星進(jìn)行監(jiān)測(cè)的過程中,會(huì)在導(dǎo)航電文中傳輸衛(wèi)星時(shí)鐘偏差、衛(wèi)星時(shí)鐘頻率漂移和衛(wèi)星時(shí)鐘頻率漂移速度,接收機(jī)在位置解算過程中可以對(duì)其進(jìn)行補(bǔ)償,因此此項(xiàng)可忽略。
(4)接收機(jī)時(shí)鐘誤差
接收機(jī)本地時(shí)鐘和GPS系統(tǒng)時(shí)間存在一定的誤差,這個(gè)誤差在正常解算偽距時(shí)會(huì)通過定位方程進(jìn)行修正,但在進(jìn)行欺騙、已知偽距反向推算時(shí)間時(shí),這個(gè)鐘差可以導(dǎo)致最大約為10 m的誤差。
(5)探測(cè)系統(tǒng)對(duì)目標(biāo)位置的定位誤差
目前,欺騙方對(duì)目標(biāo)位置的探測(cè)一般通過雷達(dá)探測(cè)、光電觀測(cè)和無線電偵測(cè)等手段,三者的應(yīng)用場(chǎng)景均有一定限制,且定位精度具有一定限制。而GPS欺騙中,對(duì)目標(biāo)位置定位存在的誤差會(huì)導(dǎo)致欺騙信號(hào)和真實(shí)信號(hào)碼相位有一定延遲。當(dāng)定位距離誤差從500 m變化到3 km,對(duì)應(yīng)的碼片相位誤差將達(dá)到將近10個(gè)碼片。
綜上所述,在可能影響欺騙信號(hào)初始碼相位調(diào)整的誤差之中,探測(cè)系統(tǒng)對(duì)目標(biāo)位置的定位距離誤差是最大的一個(gè)。
2 滑動(dòng)牽引入鎖
2.1 滑動(dòng)牽引原理
為解決欺騙信號(hào)和真實(shí)信號(hào)碼片誤差帶來的同步問題,根據(jù)文獻(xiàn)[7-8],采用碼片滑動(dòng)實(shí)現(xiàn)欺騙信號(hào)與真實(shí)信號(hào)偽碼相位的自動(dòng)同步。圖2描述了基于碼片滑動(dòng)原理的欺騙信號(hào)牽引入鎖過程,3個(gè)紅色點(diǎn)值分別表示超前、即時(shí)、滯后三支路的輸出相關(guān)值。
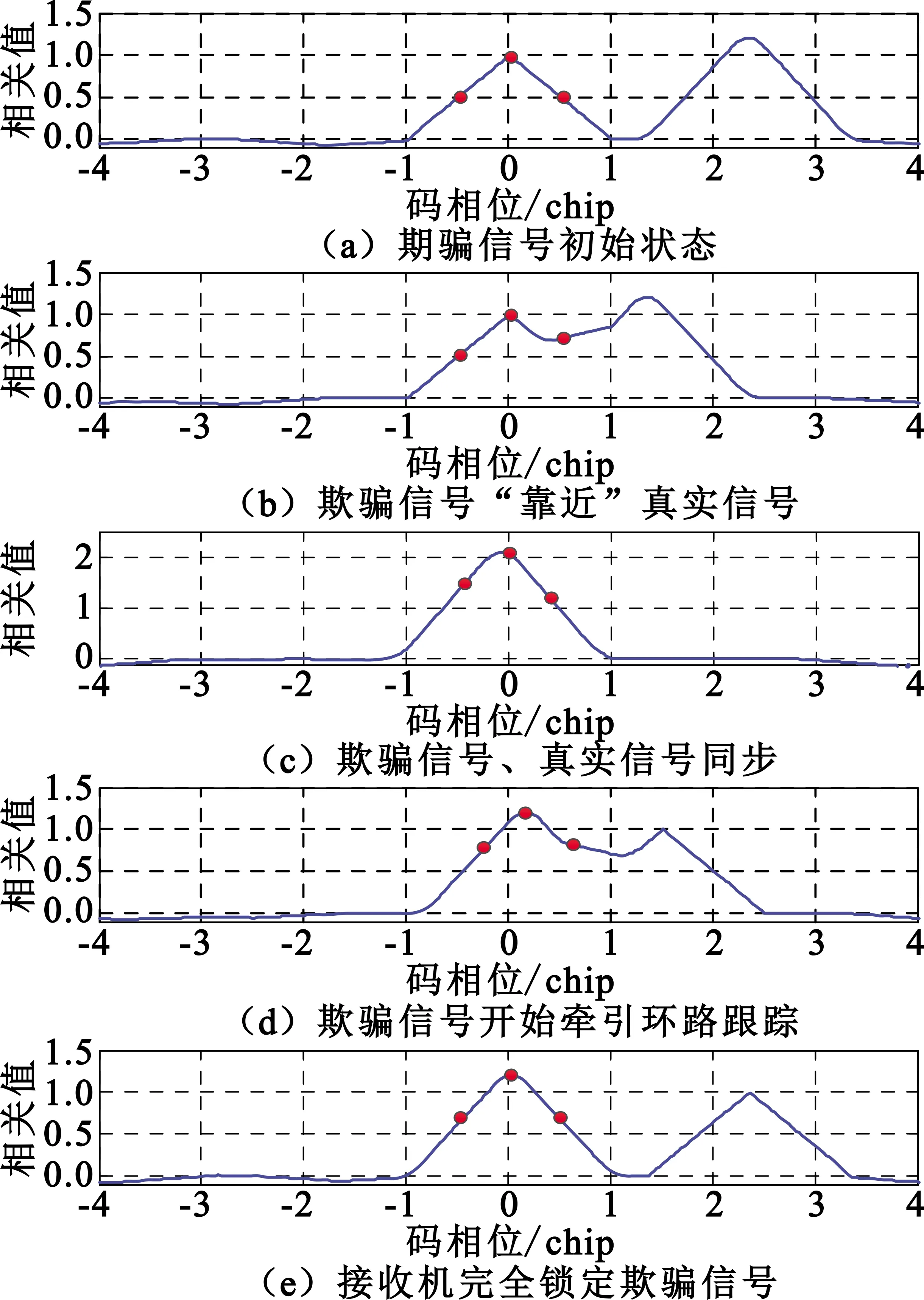
圖2 偽碼滑動(dòng)入鎖過程
如圖2(a)所示,接收機(jī)超前、即時(shí)、滯后三條支路已跟蹤鎖定真實(shí)信號(hào),欺騙信號(hào)與真實(shí)信號(hào)碼相位誤差大于2個(gè)碼片,對(duì)接收機(jī)狀態(tài)不產(chǎn)生影響;圖2(b)表示欺騙信號(hào)已逐漸靠近真實(shí)信號(hào);圖2(c)表示真實(shí)信號(hào)與欺騙信號(hào)在碼相位上已對(duì)齊;圖2(d)表示由于功率優(yōu)勢(shì),接收機(jī)跟蹤環(huán)路轉(zhuǎn)而跟蹤上欺騙信號(hào),并由于欺騙信號(hào)與真實(shí)信號(hào)存在的相對(duì)滑動(dòng),兩者逐漸遠(yuǎn)離;圖2(e)表示接收機(jī)已完全跟蹤鎖定欺騙信號(hào),并且欺騙信號(hào)與真實(shí)信號(hào)的碼片差已經(jīng)大于2個(gè)碼片,真實(shí)信號(hào)對(duì)接收機(jī)跟蹤狀態(tài)不再產(chǎn)生影響,在一定時(shí)間后,真實(shí)信號(hào)和欺騙信號(hào)雖然會(huì)再次進(jìn)行碼相位對(duì)齊,但由于真實(shí)信號(hào)功率低于欺騙信號(hào),因此不會(huì)影響接收機(jī)對(duì)欺騙信號(hào)的跟蹤狀態(tài)。
由圖2及上文可知,對(duì)于具有功率優(yōu)勢(shì)的欺騙信號(hào),只要修改其偽碼速率,就能產(chǎn)生相對(duì)滑動(dòng)的相關(guān)峰,實(shí)現(xiàn)偽碼相位自動(dòng)同步,并牽引接收機(jī)跟蹤欺騙信號(hào)。文獻(xiàn)[8,11]對(duì)滑動(dòng)同步原理做了細(xì)致的理論證明,指出只要進(jìn)入接收機(jī)的欺騙信號(hào)功率大于真實(shí)信號(hào),即可牽引接收機(jī)跟蹤。
2.2 滑動(dòng)牽引入鎖的功率損失分析
由于滑動(dòng)入鎖技術(shù)涉及修改信號(hào)參數(shù),下面就信號(hào)參數(shù)對(duì)相關(guān)峰值的影響進(jìn)行了理論推導(dǎo),可為實(shí)際應(yīng)用參數(shù)選擇提供指導(dǎo)。
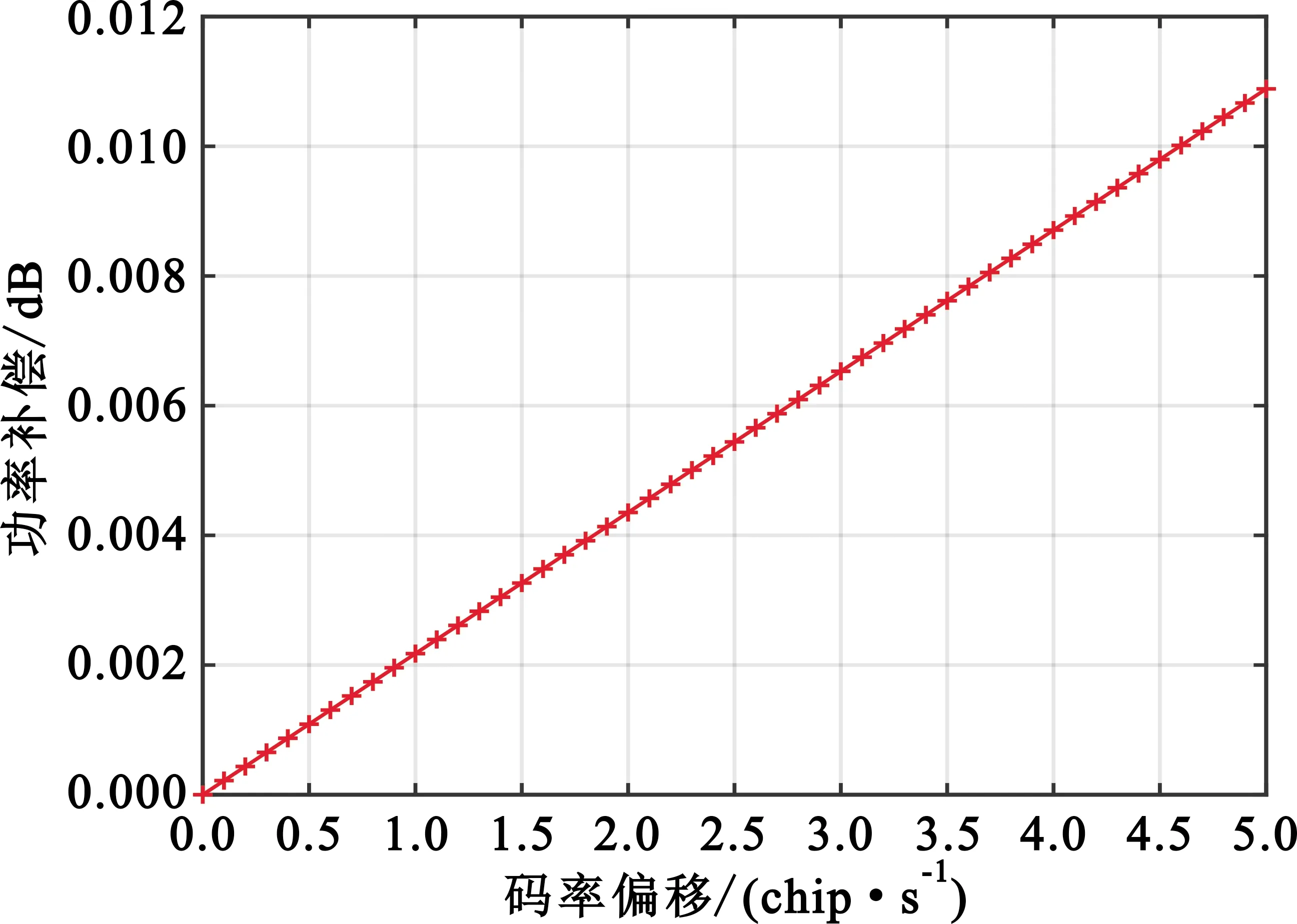
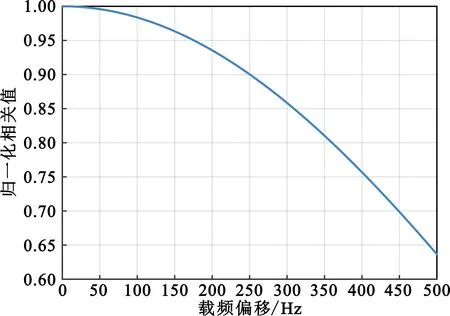
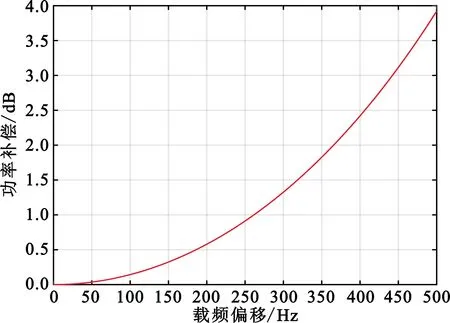
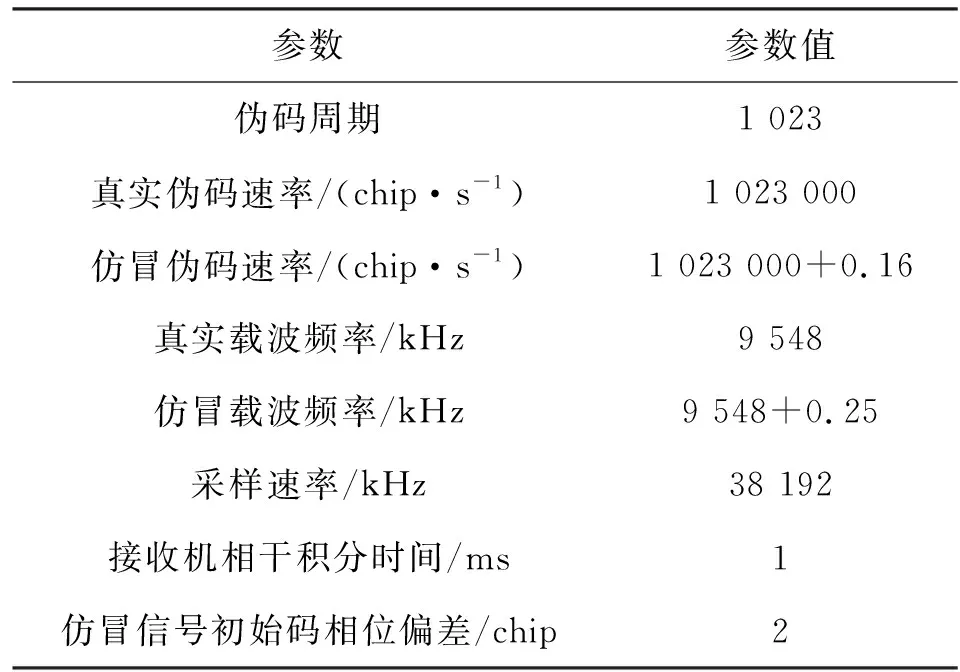
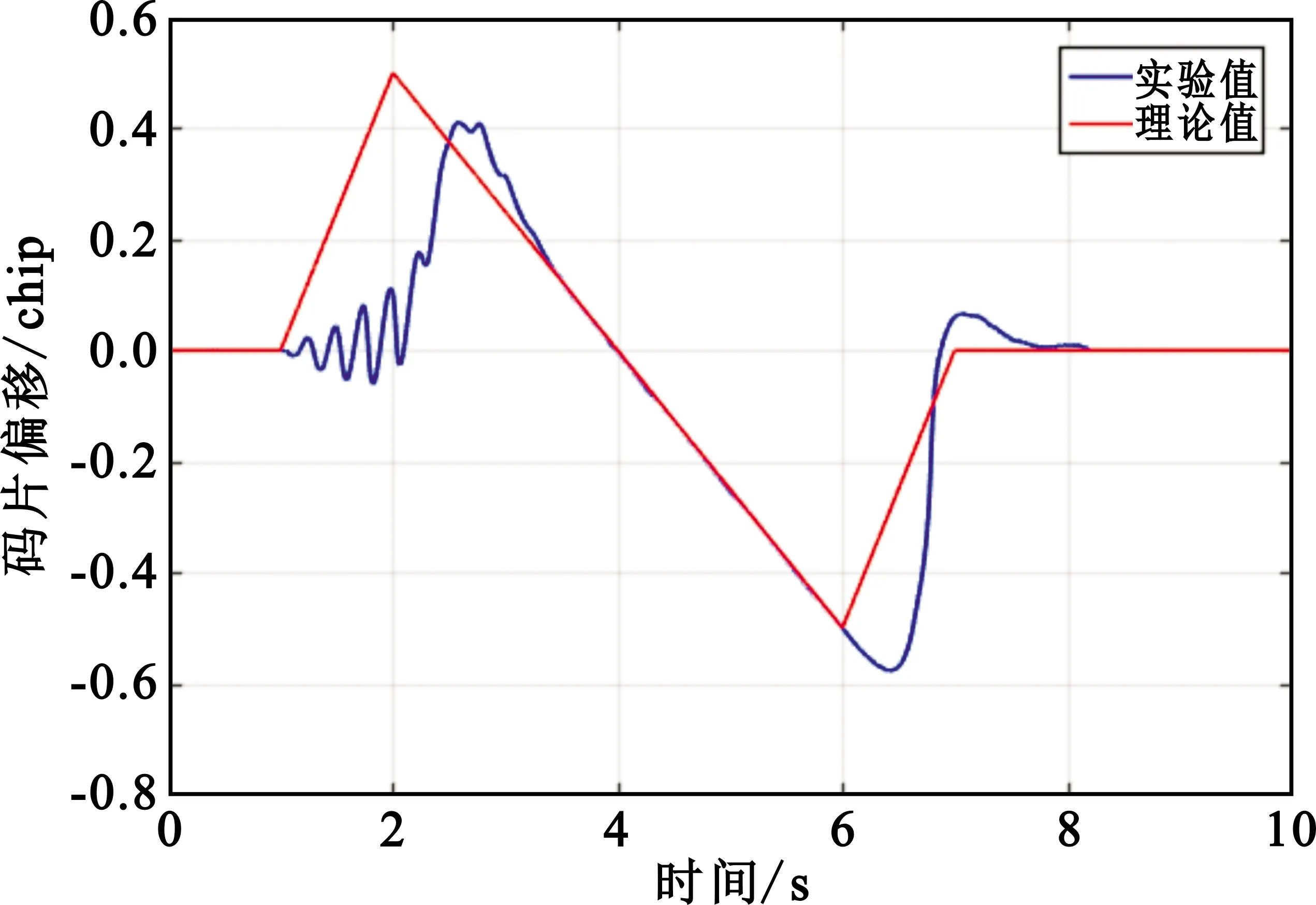
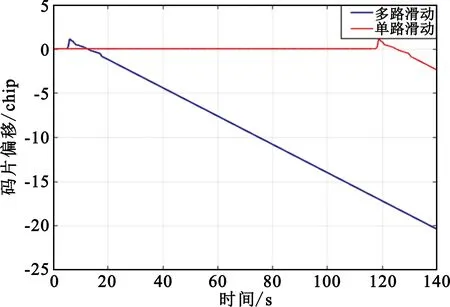
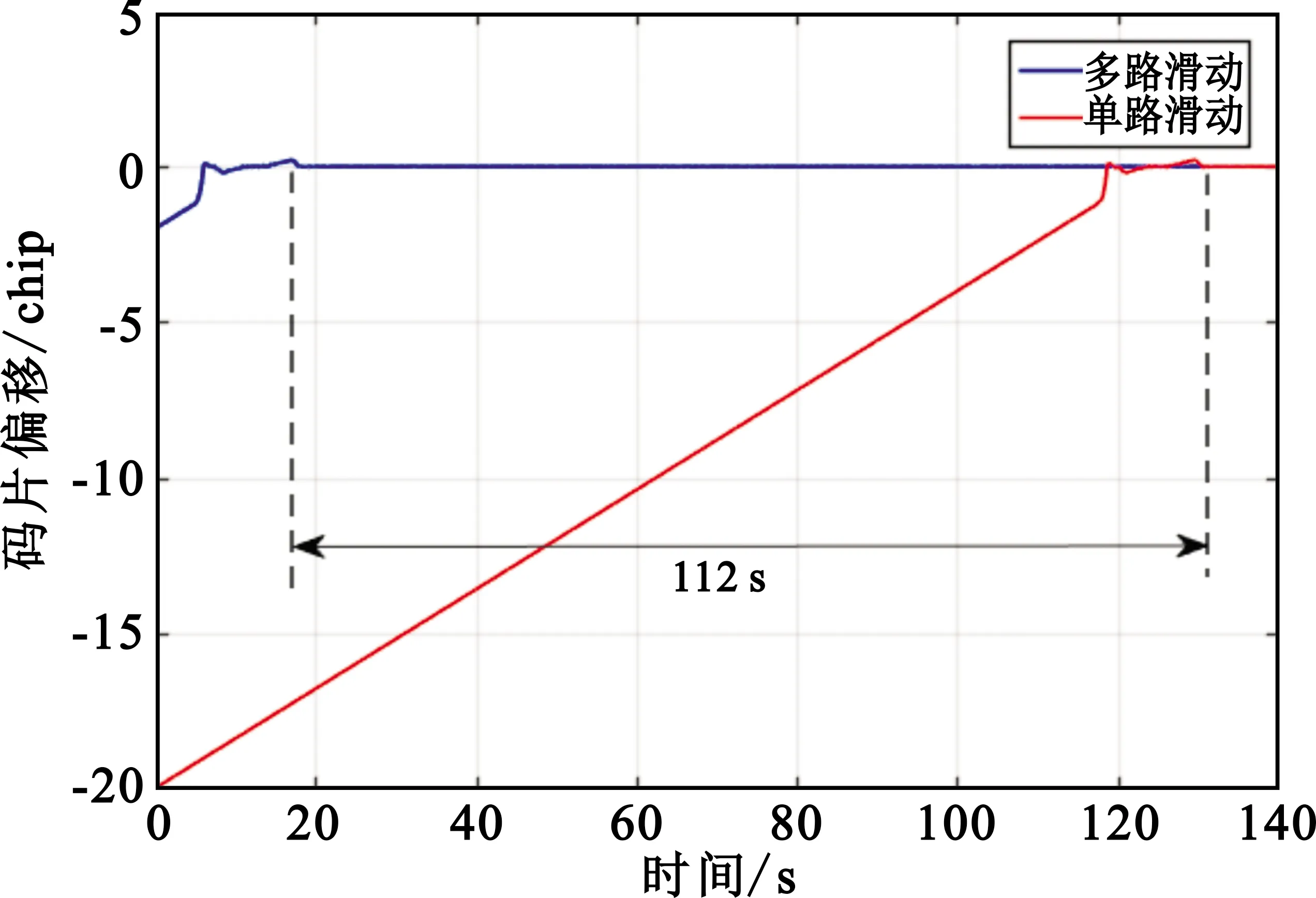
假設(shè)GPS接收機(jī)已經(jīng)跟蹤上真實(shí)信號(hào),分析偽碼速率的改變對(duì)相關(guān)峰值的影響。令真實(shí)信號(hào)偽碼碼元寬度為TActual,欺騙信號(hào)偽碼碼元寬度為TSpoof。當(dāng)TSpoof 設(shè)Δ=TActual-TSpoof,則有 (1) (2) 式(1)括號(hào)中第二項(xiàng)是錯(cuò)位部分的貢獻(xiàn)值,因?yàn)椴煌膫未a這部分值不同,所以該項(xiàng)采用期望值來代替: (3) 又因?yàn)閏k為偽隨機(jī)碼,ck、ck+1和k相互獨(dú)立,根據(jù)偽隨機(jī)碼的性質(zhì),對(duì)于雙極性非歸零型二元偽碼序列,有E(ck)=E(ck+1)=1/N,所以由式(3)可得 (4) 聯(lián)立式(2)和式(4)可知相關(guān)值為 (5) (6) 采用前面推導(dǎo)的思想,由式(6)可推導(dǎo)得出 (7) 當(dāng)i=1時(shí),a=0,b=M,式(7)就是式(5)。實(shí)際上,當(dāng)i=N/2時(shí),相關(guān)值最大,此時(shí)中心左右兩部分碼片對(duì)齊狀態(tài)一致。此時(shí),認(rèn)為中心左右的碼片為第一個(gè)碼片,該碼片和本地偽碼有TActual-Δ-Δ/2的寬度對(duì)齊,Δ+Δ/2的寬度未對(duì)齊;第二個(gè)碼片則有TActual-2Δ-Δ/2的寬度對(duì)齊,2Δ+Δ/2的寬度未對(duì)齊。設(shè)此種情況下,仍有M個(gè)碼片有交疊,有N-M個(gè)碼片在時(shí)間上已完全錯(cuò)開。由于中心對(duì)稱,因此計(jì)算一半即可。令d=min((N-1)/2,M),計(jì)算得該情況下相關(guān)值為 (8) 上述分析表明偽碼速率的改變將會(huì)導(dǎo)致相關(guān)值的損失,但該損失是可計(jì)算可預(yù)見的,可以通過增加欺騙信號(hào)的發(fā)射功率進(jìn)行補(bǔ)償。采用干信比(Jamming-to-Signal Ratio)對(duì)其進(jìn)行衡量: (9) 根據(jù)式(9)可知,對(duì)于已知偽碼速率、偽碼周期的GPS系統(tǒng),根據(jù)欺騙方案中設(shè)定的偽碼速率偏移值就可以求解出成功實(shí)現(xiàn)滑動(dòng)入鎖的最小干信比。由于GPS信號(hào)載頻和碼率來自一個(gè)時(shí)鐘源,兩者保持1 540倍的比例變化關(guān)系,且受接收機(jī)跟蹤環(huán)路帶寬限制,所以在實(shí)際應(yīng)用中選擇的偽碼速率偏移值較小。 圖3給出了偽碼速率偏移5 chip/s內(nèi)的相關(guān)值變化值和其對(duì)應(yīng)的功率補(bǔ)償值,可以看出5 chip/s偏移范圍內(nèi)相關(guān)值變化不大,最小值為0.998 7,其對(duì)應(yīng)的功率補(bǔ)償值為0.010 9 dB,因此實(shí)際應(yīng)用中碼率變化造成的相關(guān)峰值損失基本可以忽略不計(jì)。此時(shí)考慮載頻具有偏差Δf,則相關(guān)值為 (10) (a)相關(guān)值損失 (b)功率補(bǔ)償值圖3 碼率變化帶來的相關(guān)值損失和對(duì)應(yīng)的功率補(bǔ)償值 由于sinc(Δf/RB)≈1,因此式(10)可以寫為 (11) 對(duì)應(yīng)的JSR為 (12) 從圖4中可以看出,500 Hz偏移范圍內(nèi)相關(guān)值變化較大,對(duì)應(yīng)的最大功率補(bǔ)償值接近4 dB,因此載頻偏移對(duì)相關(guān)峰值損失占主要因素。假設(shè)實(shí)際應(yīng)用中Δf=250 Hz時(shí),對(duì)應(yīng)的碼率偏移為RBΔ=Δf/1540≈0.16 chip/s,此時(shí)載頻偏差所需的功率補(bǔ)償值為0.912 1 dB,而碼率偏差所需的功率補(bǔ)償值僅為0.000 3 dB,因此實(shí)際應(yīng)用中應(yīng)考慮載頻偏差為功率損失的主要因素。 (a) 相關(guān)值損失 (b)功率補(bǔ)償值圖4 載頻變化帶來的相關(guān)值損失和對(duì)應(yīng)的功率補(bǔ)償值 實(shí)際工程應(yīng)用中,無法判斷自主產(chǎn)生的欺騙信號(hào)與真實(shí)信號(hào)偽碼相位的超前滯后關(guān)系。當(dāng)探測(cè)系統(tǒng)定位最大距離誤差為3 km,在將滑動(dòng)速度確定為增加欺騙偽碼速率時(shí),理論最短滑動(dòng)時(shí)間為t=10/RBΔ,最長(zhǎng)滑動(dòng)時(shí)間為t=(1 023-10)/RBΔ,當(dāng)RBΔ=0.16 chip/s時(shí),分別為62.5 s和6 331.25 s,兩者差距明顯,各占0.5的概率,可見超前滯后模糊將會(huì)導(dǎo)致欺騙起效時(shí)間的二值性,直接造成起效時(shí)間顯著增加。 為增強(qiáng)實(shí)際工程設(shè)備的應(yīng)用效果,解決偽碼相位超前滯后模糊帶來的起效時(shí)間二值性,本文提出碼片誤差滯后擴(kuò)展處理技術(shù),通過對(duì)欺騙信號(hào)構(gòu)造時(shí)的初始碼相位進(jìn)行碼片誤差向滯后方向擴(kuò)大處理,即假設(shè)已知誤差范圍為[-10 chip,10 chip],將誤差基準(zhǔn)化,向滯后方向擴(kuò)展10 chip誤差,將誤差范圍更改為[0,20 chip],確保欺騙信號(hào)滯后于真實(shí)信號(hào)。 圖5為目標(biāo)-欺騙設(shè)備-衛(wèi)星三維空間關(guān)系的簡(jiǎn)化模型,將時(shí)延計(jì)算等效簡(jiǎn)化為一維關(guān)系。綠點(diǎn)代表目標(biāo)真實(shí)位置。由于探測(cè)系統(tǒng)的定位精度,導(dǎo)致計(jì)算時(shí)延后構(gòu)造的欺騙信號(hào)最大可能超前或滯后真實(shí)信號(hào)3 km(10 chip)。此時(shí)通過控制延時(shí),將欺騙信號(hào)初始碼相位滯后10 chip,能夠保證欺騙信號(hào)與真實(shí)信號(hào)的碼相位關(guān)系為滯后0~20 chip,保證了欺騙信號(hào)的滑動(dòng)方向。 圖5 空間關(guān)系簡(jiǎn)化模型 為了縮減由于擴(kuò)大滑動(dòng)距離帶來的滑動(dòng)時(shí)間代價(jià),本文采用多路并發(fā)信號(hào)代替單路信號(hào),即通過空間資源消耗換取時(shí)間上的增益,將原本每顆星的單路信號(hào)可能需要滑動(dòng)距離20 chip平均分發(fā)給多路信號(hào),單路信號(hào)滑動(dòng)的距離就能得到相應(yīng)的減少,以便欺騙信號(hào)更快實(shí)現(xiàn)碼相位同步。整個(gè)欺騙過程具體流程如下: Step1 時(shí)基同步,保證欺騙設(shè)備本地時(shí)鐘與衛(wèi)星系統(tǒng)時(shí)間同步。 Step2 欺騙系統(tǒng)根據(jù)接收機(jī)概略位置計(jì)算可見衛(wèi)星。 Step3 根據(jù)衛(wèi)星信號(hào)傳輸時(shí)間、欺騙信號(hào)初始時(shí)間、系統(tǒng)處理時(shí)延等計(jì)算欺騙信號(hào)各顆可見衛(wèi)星偽碼初始相位。 Step4 根據(jù)欺騙距離估計(jì)傳輸路徑功率損耗,并通過預(yù)設(shè)的欺騙信號(hào)參數(shù)計(jì)算欺騙功率增益。 Step5 擴(kuò)頻調(diào)制生成各顆可見衛(wèi)星信號(hào)并合成一路信號(hào),通過時(shí)延線處理,實(shí)現(xiàn)多路欺騙信號(hào)的發(fā)射。 Step6 效能評(píng)估,觀察目標(biāo)接收機(jī)的應(yīng)激反應(yīng)。 為驗(yàn)證滑動(dòng)牽引入鎖理論的正確性以及可實(shí)踐性,分別采用軟件接收機(jī)、商用接收機(jī)、移動(dòng)定位終端對(duì)碼片誤差滯后擴(kuò)展的多路滑動(dòng)技術(shù)進(jìn)行驗(yàn)證。 采用GPS軟件接收機(jī)模擬靜態(tài)接收機(jī)進(jìn)行滑動(dòng)欺騙技術(shù)的原理性驗(yàn)證,實(shí)驗(yàn)參數(shù)設(shè)置如表1所示。 表1 實(shí)驗(yàn)1仿真參數(shù) 由設(shè)置的仿真參數(shù),利用式(9)和式(12)求得成功欺騙所需最小功率補(bǔ)償值為大于0.912 1 dB。將欺騙信號(hào)損失功率補(bǔ)償后,分別以不同功率實(shí)驗(yàn),將實(shí)驗(yàn)結(jié)果與文獻(xiàn)[8]所述理論結(jié)果進(jìn)行對(duì)比,如圖6~8所示。 (a)真實(shí)信號(hào)與本地復(fù)現(xiàn)碼相位差 (b)欺騙信號(hào)與本地復(fù)現(xiàn)碼相位差圖6 欺騙信號(hào)相關(guān)峰值等于真實(shí)信號(hào)相關(guān)峰值 (a)真實(shí)信號(hào)與本地復(fù)現(xiàn)碼相位差 (b)欺騙信號(hào)與本地復(fù)現(xiàn)碼相位差圖7 欺騙信號(hào)相關(guān)峰值等于1.25倍真實(shí)信號(hào)相關(guān)峰值 (a)真實(shí)信號(hào)與本地復(fù)現(xiàn)碼相位差 (b)欺騙信號(hào)與本地復(fù)現(xiàn)碼相位差圖8 欺騙信號(hào)相關(guān)峰值等于2.5倍真實(shí)信號(hào)相關(guān)峰值 圖6中當(dāng)欺騙信號(hào)和真實(shí)信號(hào)相關(guān)峰值相等時(shí),接收機(jī)本地復(fù)現(xiàn)偽碼在一定時(shí)間的抖動(dòng)后與真實(shí)信號(hào)偽碼相位差保持為0,而與欺騙信號(hào)逐漸變大,此時(shí)欺騙失敗。當(dāng)增加欺騙干信比,使欺騙信號(hào)相關(guān)峰值大于真實(shí)信號(hào)相關(guān)峰值,如圖7和圖8所示,在欺騙信號(hào)逐漸滑動(dòng)靠向真實(shí)信號(hào)時(shí),本地復(fù)現(xiàn)碼開始出現(xiàn)抖動(dòng),并且經(jīng)過一定作用時(shí)間后,本地復(fù)現(xiàn)碼與真實(shí)信號(hào)的偽碼相位差從0逐漸變大,而與欺騙信號(hào)的偽碼相位差最終保持為0,說明最終欺騙信號(hào)成功被接收機(jī)跟蹤,滑動(dòng)入鎖成功。同時(shí),對(duì)比圖7和圖8可以發(fā)現(xiàn),隨著干信比的增大,能在一定程度上影響欺騙起效時(shí)間。實(shí)驗(yàn)值均與理論值對(duì)比,除了跳變點(diǎn),整體趨勢(shì)一致,仿真與理論相符。實(shí)際應(yīng)用中,可根據(jù)估計(jì)真實(shí)信號(hào)功率確定欺騙生效功率;再根據(jù)欺騙參數(shù)選擇,結(jié)合2.2節(jié)理論分析結(jié)果對(duì)損失功率進(jìn)行補(bǔ)償。 為了驗(yàn)證碼片誤差滯后擴(kuò)展處理對(duì)欺騙信號(hào)滑動(dòng)入鎖效能的改進(jìn),設(shè)置兩組欺騙實(shí)驗(yàn),每組信號(hào)與真實(shí)信號(hào)的初始碼片誤差隨機(jī)設(shè)置為[-2 chip,2 chip]中的一值來模擬實(shí)際應(yīng)用場(chǎng)景中初始碼相位的超前滯后模糊問題,欺騙功率增益為2 dB,其他參數(shù)設(shè)置同表1。對(duì)A組信號(hào)采用初始碼片誤差滯后擴(kuò)展處理,B組不做處理,仿真信號(hào)時(shí)長(zhǎng)為100 s,通過欺騙信號(hào)在仿真時(shí)長(zhǎng)內(nèi)是否入鎖成功來判斷欺騙信號(hào)初始時(shí)刻是超前還是滯后真實(shí)信號(hào),實(shí)驗(yàn)結(jié)果如表2所示。 表2 實(shí)驗(yàn)2實(shí)驗(yàn)結(jié)果 實(shí)驗(yàn)結(jié)果表明,通過碼片誤差滯后擴(kuò)展處理,能夠保證欺騙信號(hào)初始滯后于真實(shí)信號(hào),在增加欺騙碼率時(shí),欺騙信號(hào)能夠在最快時(shí)間內(nèi)與真實(shí)信號(hào)同步。 當(dāng)欺騙信號(hào)和真實(shí)信號(hào)初始碼片誤差達(dá)到10個(gè)碼片時(shí),再擴(kuò)大初始碼片誤差到最大20個(gè)碼片,通過多路并發(fā)滑動(dòng)技術(shù),選擇并發(fā)數(shù)為10,可將偽碼相對(duì)滑動(dòng)時(shí)間限制在最大為2個(gè)碼片,而單路滑動(dòng)則仍需要20個(gè)碼片。設(shè)置實(shí)驗(yàn)參數(shù)如表1所示,僅將初始碼相位差改為20 chip,欺騙功率增益為2 dB。分別采用多路并發(fā)滑動(dòng)和單路滑動(dòng)對(duì)已經(jīng)穩(wěn)定跟蹤真實(shí)信號(hào)的靜態(tài)接收機(jī)進(jìn)行欺騙,仿真結(jié)果如圖9所示。 (a)真實(shí)信號(hào)碼相位差對(duì)比 (b)欺騙信號(hào)碼相位差對(duì)比圖9 多路滑動(dòng)與單路滑動(dòng)起效時(shí)間對(duì)比 欺騙起效時(shí)間的理論值分別為12.5 s和125 s,實(shí)際上,從圖9中可以看到當(dāng)采用多路滑動(dòng)策略時(shí),19 s左右時(shí),接收機(jī)完全穩(wěn)定跟蹤欺騙信號(hào),而采用單路滑動(dòng)策略,則大約需要131 s接收機(jī)才能穩(wěn)定跟蹤欺騙信號(hào)。考慮誤差體現(xiàn)在對(duì)接收機(jī)牽引過程上,且圖9標(biāo)注時(shí)間為確定接收機(jī)完全穩(wěn)定跟蹤欺騙信號(hào),因此具有一定誤差。無論從理論還是實(shí)驗(yàn)的角度,多路和單路滑動(dòng)的起效時(shí)間差均約為112 s,因此多路滑動(dòng)策略在欺騙起效時(shí)間上存在顯著優(yōu)勢(shì)。 為驗(yàn)證本文提出方法在實(shí)際應(yīng)用中的可行性和工程可實(shí)現(xiàn)性,通過導(dǎo)航信號(hào)模擬源進(jìn)行實(shí)際場(chǎng)景驗(yàn)證。實(shí)驗(yàn)設(shè)置欺騙信號(hào)功率高于真實(shí)信號(hào)2 dB,偽碼速率快0.2 chip/s,初始偽碼相位差為2 chip,設(shè)置接收機(jī)靜態(tài)位置為(30.6469N,104.0451E),欺騙信號(hào)于真實(shí)信號(hào)播發(fā)60 s后發(fā)射,前30 s位置為(30.6469N,104.0451E),確保欺騙信號(hào)能夠滑過滯后的碼片,通過功率優(yōu)勢(shì)牽引接收機(jī)入鎖;而后將欺騙信號(hào)定位位置設(shè)置為(30.6469N,104.0451E)到(30.6442N,104.0392E)的一段動(dòng)態(tài)路徑,便于直觀感受欺騙實(shí)驗(yàn)結(jié)果。接收機(jī)分別采用中科微電子ATGM332D和某型智能手機(jī)。實(shí)驗(yàn)結(jié)果如圖10所示。 圖10 動(dòng)態(tài)位置欺騙實(shí)驗(yàn)結(jié)果 從入鎖前后的接收信號(hào)載噪比差2 dB可以初步判斷欺騙信號(hào)已被接收機(jī)無感接收,從定位結(jié)果反映的動(dòng)態(tài)軌跡證明欺騙信號(hào)被接收機(jī)正常接收并影響了接收機(jī)的定位解算,欺騙有效。 本文提出的針對(duì)民用GPS異步欺騙改進(jìn)技術(shù)可以定量化計(jì)算信號(hào)參數(shù)對(duì)于欺騙信號(hào)功率損失的影響。通過碼片誤差滯后擴(kuò)展處理,解決了實(shí)際工程應(yīng)用中構(gòu)造欺騙信號(hào)存在的偽碼相位超前滯后模糊問題,能保證在最短時(shí)間實(shí)現(xiàn)偽碼同步。采用多路并發(fā)滑動(dòng)取代傳統(tǒng)的單路滑動(dòng)技術(shù),克服由于擴(kuò)展碼片誤差帶來的滑動(dòng)時(shí)間代價(jià),并對(duì)目標(biāo)定位引導(dǎo)數(shù)據(jù)不敏感。仿真實(shí)驗(yàn)條件下,250 Hz的載頻偏移條件下所需干信比為0.912 1 dB,3 km定位誤差下,0.16 chip/s的相對(duì)滑動(dòng)速度,能夠?qū)崿F(xiàn)欺騙信號(hào)穩(wěn)定入鎖,且通過實(shí)際設(shè)備測(cè)試,驗(yàn)證該方法工程可實(shí)現(xiàn)。所提欺騙方法具有隱蔽、可靠的特點(diǎn),對(duì)實(shí)施GPS欺騙研究具有很好的指導(dǎo)作用。






2.3 欺騙策略

3 仿真驗(yàn)證
3.1 基于滑動(dòng)入鎖原理的GPS欺騙實(shí)驗(yàn)


3.2 碼片誤差滯后擴(kuò)展處理性能驗(yàn)證
3.3 多路并發(fā)滑動(dòng)與單路滑動(dòng)起效時(shí)間對(duì)比
3.4 動(dòng)態(tài)位置欺騙實(shí)驗(yàn)

4 結(jié) 論
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00