智能手機放置方式對瀝青路面振動數據采集質量的影響研究*
2021-02-26 02:16:22嚴守靖王洋洋奚晨晨
科技創新與應用 2021年9期
詹 偉 ,嚴守靖,王洋洋,奚晨晨
(浙江省交通運輸科學研究院 道路工程研究所,浙江 杭州 310023)
引言
智能手機不僅具有卓越的通信、存儲和計算功能,還擁有強大的感知能力[1-2]。智能手機都安裝有加速度感知器、GPS 定位定位器、磁場感知器、溫濕度感知器、重力和轉動感知器等傳感元件。將智能手機固定在車輛上,打開手機自身攜帶的傳感器即可采集車輛的振動狀態數據,具有十分高效和簡便的優勢[3-4]。
近年來,利用智能手機采集車輛在路面上行駛數據的研究成果逐漸增多。巴西圣保羅大學的Souza V 學者[5]利用智能手機加速度傳感器采集的加速度數據,提出了與瀝青路面評價相關的實際數據流應用,可以使不同用戶無需費力地在駕駛期間無處不在地監控路面質量。美國德克薩斯州立大學Li X 和Goldberg DW[6]提出了一種基于人群感知的智能手機路面評估系統。智能手機中的內置GPS 接收器和加速度計用于捕獲路面的地理參考Z軸加速度的空間序列,可以通過挖掘人群感測數據來有效地識別路面狀況并且可以正確地檢測和定位瞬態事件。蘇交科集團股份有限公司王惠勇[7]采用智能手機加速度信號為數據基礎,從自主采集抗干擾能力和系統魯棒性設計出發開發了手機加速度采集軟件,用于預測瀝青路面的平整度。長安大學徐松[8]研究了一種利用智能手機測試與評價路面平整度的方法,基于Android Studio 2.0的程序開發環境,開發了可以安裝在Android 智能手機上的加速度采集客戶端,建立了加速度數據與國際平整度指數之間的關系,并依托西潼高速公路和西禹高速公路進行了IRI 理論計算方法的驗證實驗。
總結近幾年國內外關于智能手機采集數據的研究成果,當前的研究方向主要集中于如何利用智能手機采集的車輛振動數據,建立車輛振動數據與路面平整度、路面舒適性指數等路面服務性能指標之間的關系[9-13]。而對于智能手機在車輛上放置方式的研究較少,考慮到智能手機在車輛上放置的位置和姿態的不同,采集是數據質量有較大的差異,從而影響振動數據的利用。因此,十分有必要研究智能手機在車輛上的放置方式對振動數據采集質量的影響。
1 智能手機采集振動數據原理
智能手機中自身攜帶了加速度、空間態、角速度、定位等傳感器,將智能手機放置于車輛內部,智能手機即可實時感知到車輛的運動狀態信息,智能手機內置傳感器的集成如圖1 所示。

圖1 智能手機內置傳感器集成
本實驗中智能手機加速度傳感器可實時感知車輛在水平方向的加速度與豎直方向的振動加速度數據。空間狀態和角速度傳感器可實時感知車輛的俯仰、橫滾、側切和角度變化的狀態,定位采用高精度民用GPS 進行經緯度定位[14-17]。智能手機傳感器空間狀態感知測試如圖2 所示。由于智能手機傳感器實時感知的數據缺少數據傳輸斷口進行導出,因此,本項目在實驗過程中采用了Mathwork 的MatlabMobile 客戶端進行實時的顯示[18-20],如圖3 所示。
2 振動數據采集
2.1 實驗裝置
由文獻表明[21-23],智能手機可使用蘋果設備和安卓設備,均可采集振動數據。本項目使用的智能手機為OPPO find7,采用Android4.7 操作系統,智能手機自身搭載的加速度傳感器、陀螺儀和電子羅盤儀等關鍵性能指標參數分別如表1 至表3 所示。
本實驗中采用全順車作為實驗用車,如圖4 所示,車輛具體關鍵參數如表4 所示。車輛主要性能參數指標包括車輛的,車輛主要參數包括車輛的懸掛、輪胎、發動機功率等參數,這些參數主要表現為車輛自身振動的頻率,與周圍環境一起,通過噪聲的形式干擾車輛豎直方向的加速度信號。
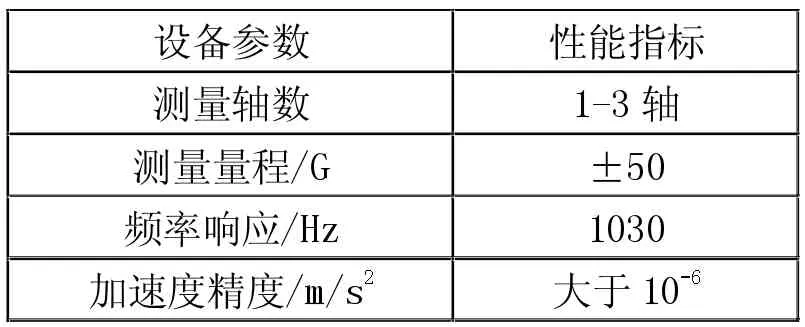
表1 加速度傳感器性能指標
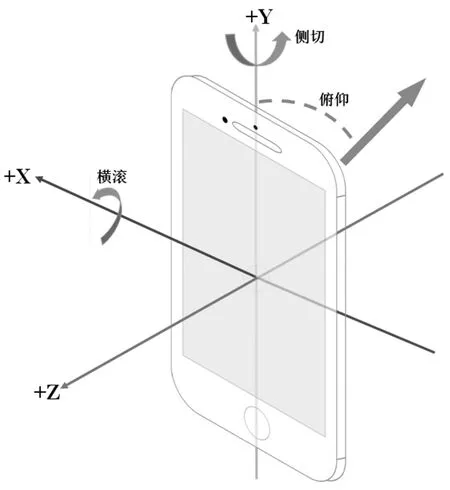
圖2 智能手機傳感器空間狀態示意圖
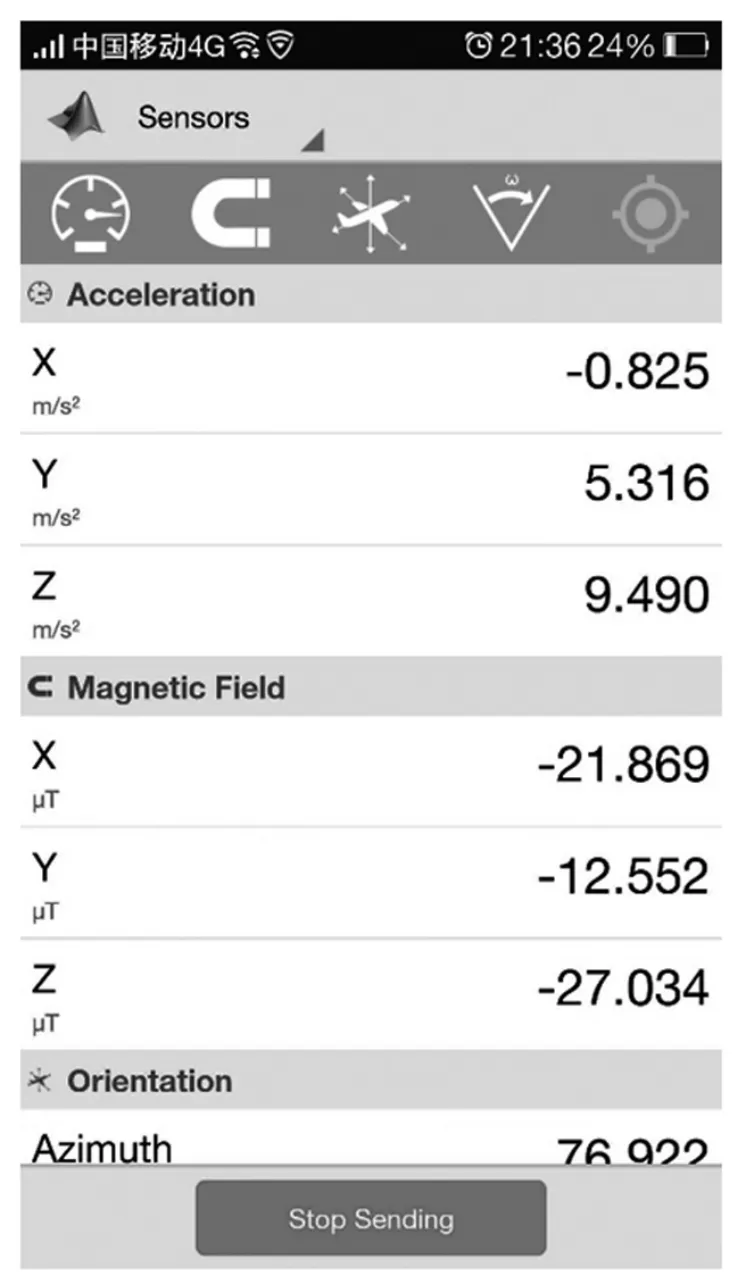
圖3 智能手機振動數據采集示意圖
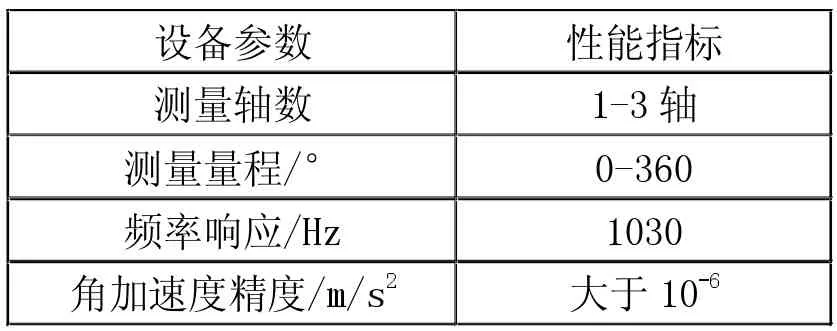
表2 陀螺儀性能指標
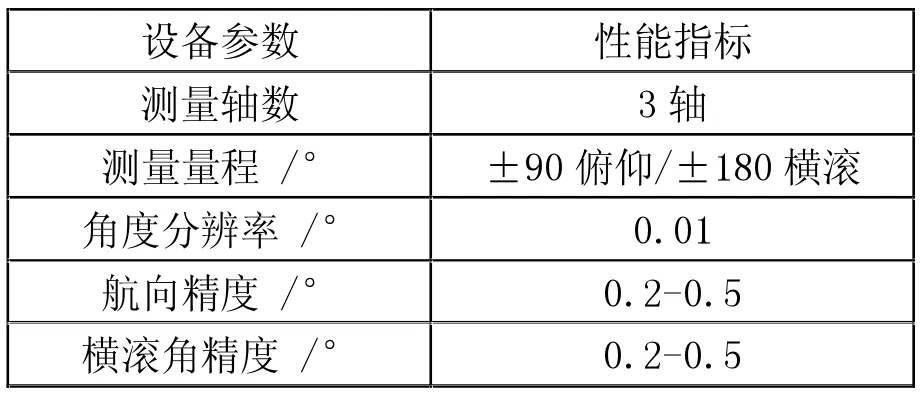
表3 電子羅盤儀性能指標

圖4 實驗使用車輛

表4 項目實驗機動車輛主要參數
2.2 智能手機固定位置和放置姿態
考慮到同一個測試車輛,在不同的車輛位置上,車輛自振的影響不同。為探究不同智能移動終端放置方式對數據采集質量的影響。本項目研究了三個固定位置(車頭、車身、車尾),兩個放置狀態(水平、豎直),通過觀察車輛振動信號振幅的變化,評價智能移動終端放置方式對數據采集質量的影響規律。實驗過程中,智能移動終端的放置方式如圖5、圖6 和圖7 所示。
圖5 車頭移動終端放置方式
圖6 車身移動終端放置方式
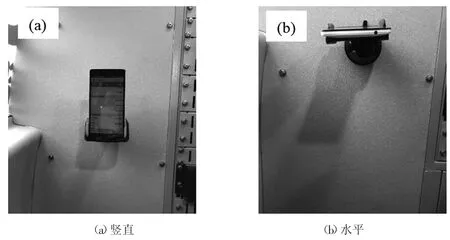
圖7 車尾移動終端放置方式
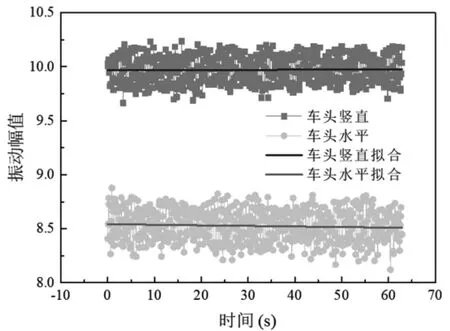
圖8 車頭位置不同放置姿態

表5 車頭位置不同放置姿態下數據采集質量
3 實驗結果分析
3.1 移動終端放置姿態分析
本項目從實際的移動終端放置狀態出發,用戶通常將移動終端放置于車輛的固定支架上。一般地,用戶都會接近以豎直或水平的姿態放置智能手機,因此,本項目在實驗中對水平和豎直放置狀態下,采集了不同固定位置下智能手機的豎向振動加速度數據,分別如圖8、圖9 和圖10 所示。數據采集質量統計分析分別如表5、表6 和表7 所示。
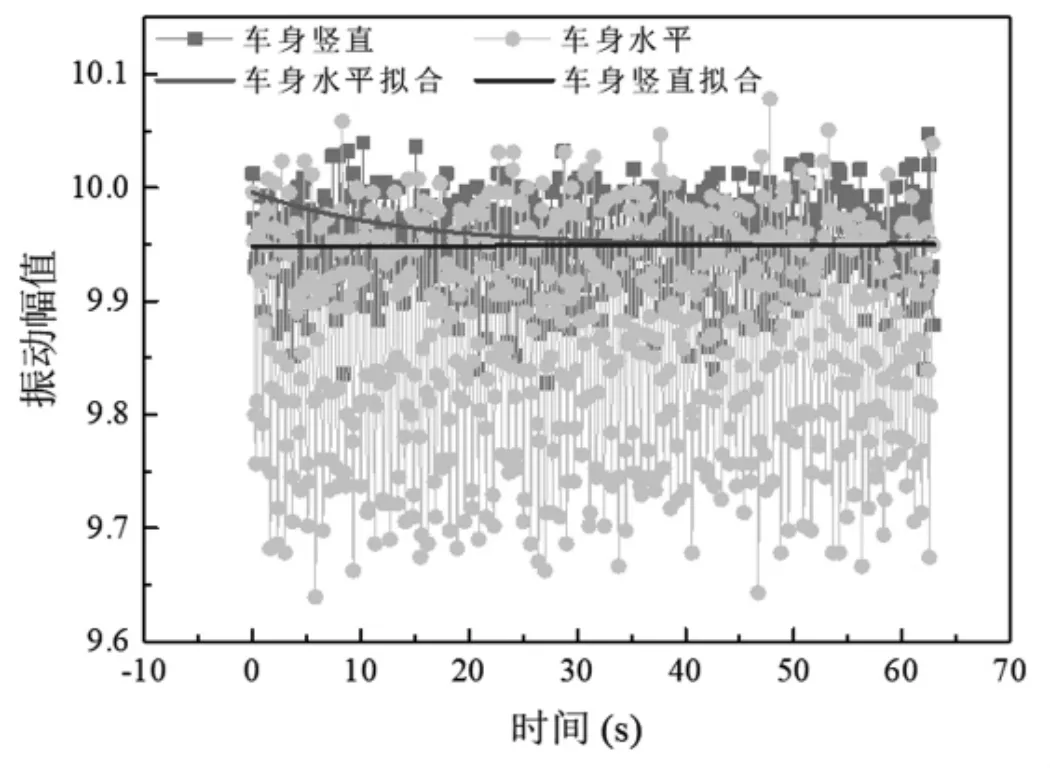
圖9 車身位置不同放置姿態
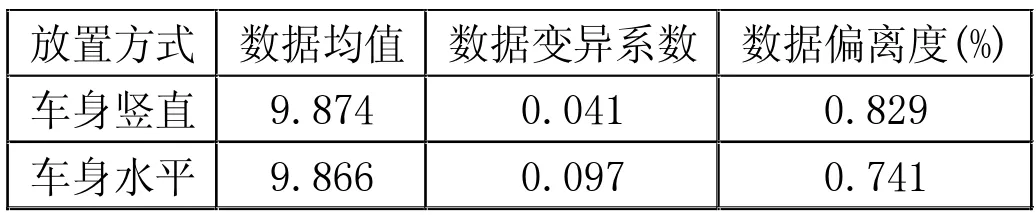
表6 車身位置不同放置姿態下數據采集質量

圖10 車尾位置不同放置姿態
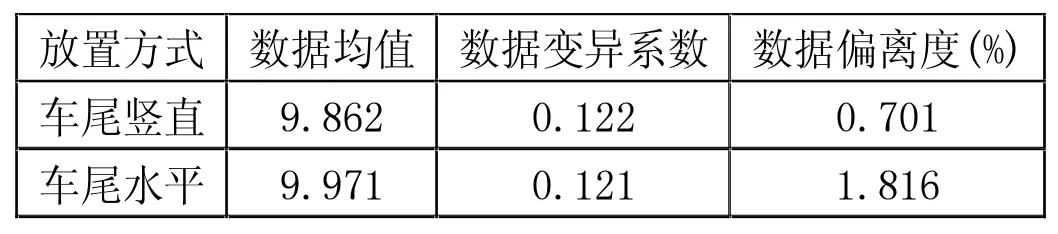
表7 車尾位置不同放置姿態下數據采集質量
由圖8 和表5 可以看出,將智能移動終端固定在車頭位置處,豎向振動加速度數據法變異系數整體較小,由此表明車頭位置的振動信號比較穩定。但移動終端在水平姿態下,加速度的均值較小,數據變異系數達到0.143,是豎直姿態的3.86 倍,而數據的偏離程度達到12.944%,超過豎直姿態的8 倍。該現象表明,盡管在車頭位置,車輛自身的振動信號比較穩定,但在水平狀態下,智能移動終端的姿態容易發生轉動,固定支架對終端的姿態固定效果不佳,而豎直姿態的固定效果較好,數據整體的采集質量較高。
由表6 可以看出,將智能移動終端固定在車身位置處,豎向振動加速度數據法變異系數整體較小,并且數據的偏離度也比較小,由此表明車身位置的振動信號比較穩定。但從圖9 可以明顯發現,移動終端在水平姿態下,豎向振動加速度數據的數據變異系數達到0.097 超過車身豎直狀態的2 倍。因此,在車身的位置上,車輛自身的振動信號比較穩定,總體的數據采集質量較高,但水平狀態數據采集的穩定性遠低于豎直放置的姿態。
由圖10 可以看出,將智能移動終端放置于車輛尾部,水平和豎直放置姿態下,水平姿態的振動信號穩定性較差,信號有明顯的偏離趨勢,而豎直放置姿態下,振動信號較為穩定。由表7 的統計分析也可以明顯發現,振動信號數據的變異系數較大,水平放置姿態和豎直放置姿態的數據變異系數相差僅為0.001。但兩者的數據偏離度相差較大,豎直放置姿態為0.701,而水平放置為1.816,超過豎直姿態的2.5 倍。因此,在車輛尾部豎直放置姿態的振動數據采集質量也優于水平姿態。
3.2 移動終端固定位置分析
智能移動終端在車輛的不同位置受到車輛自振等因素的影響差異較大,本項目在實驗中在豎直和水平姿態下,分別將智能手機固定到車輛的車頭、車身和車尾,各個部位振動信號的幅值分別如圖11 和圖12 所示。
由圖10 和圖11 可以看出,在豎直放置姿態下,車頭和車身的振動擬合曲線較為穩定,而車尾的振動擬合曲線穩定性較差,三者的振動幅值擬合曲線與當地加速度值的數據變異系數分別為0.037、0.041 和0.122。而在水平放置姿態下,車身的振動擬合曲線較為穩定,車頭的振動擬合曲線穩定性最差,三者的振動幅值擬合曲線與當地加速度值的數據變異系數分別為 0.097、0.121 和0.143。在移動終端放置姿態的情況下,固定在車輛的車頭部位,振動數據的數據穩定性最好,數據的偏離程度最低。因此,車頭部位的振動信號最穩定,采集數據的與真實數據的偏離度最小,具有較好的數據采集質量。
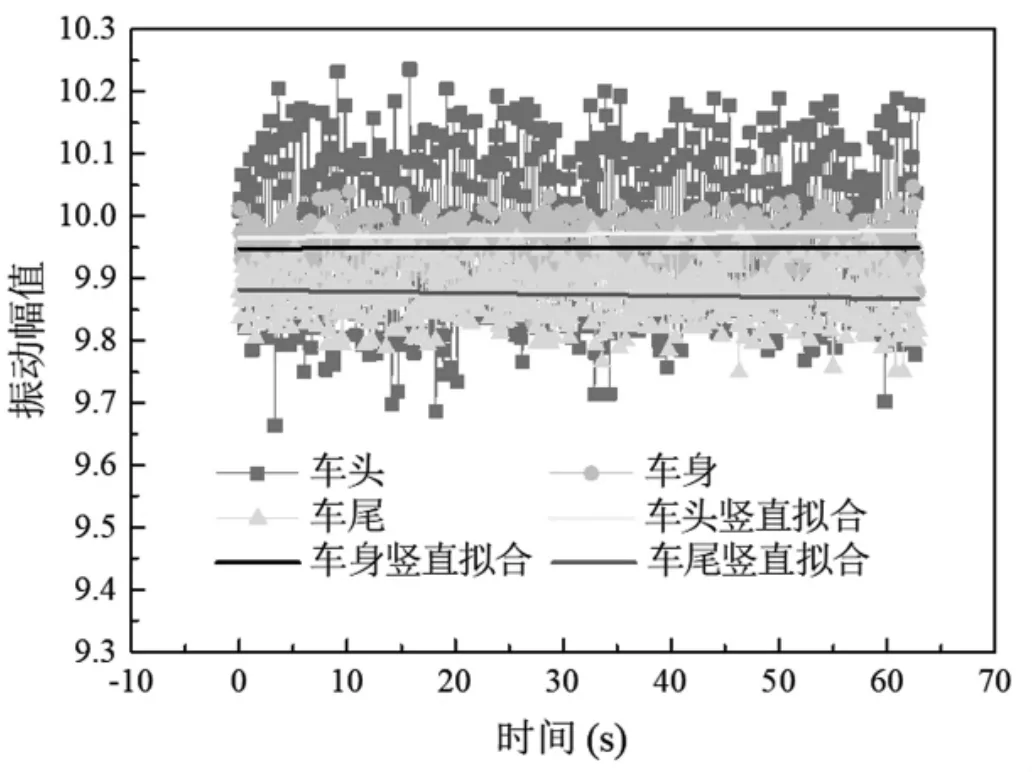
圖11 豎直姿態下不同放置部位
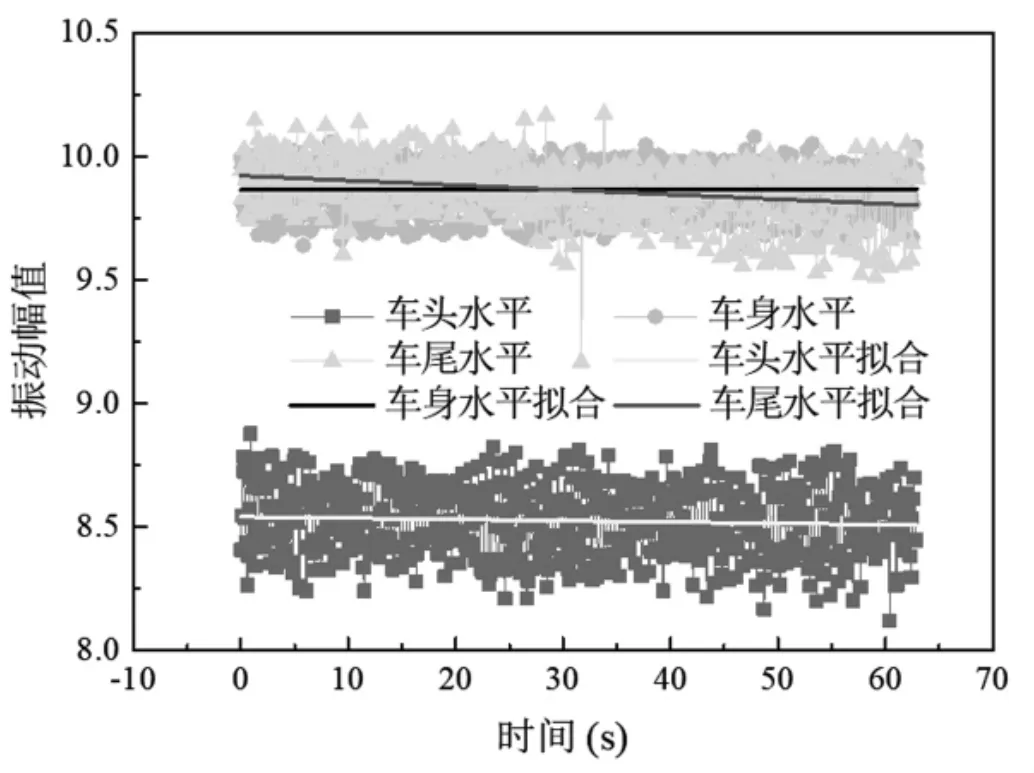
圖12 水平姿態下不同放置部位
4 結論
本文通過安卓智能手機采集車輛的振動數據,通過開展智能手機固定位置和放置姿態的實驗,采集并分析了振動數據的質量,得到了以下的結論:
(1)將智能手機固定在車輛頭部位置能獲得最穩定的振動數據,并且采集數據的與真實數據的偏離程度最小,數據質量好。
(2)智能手機在車身位置采集的振動數據穩定性較好,但數據的偏離程度較高,車輛尾部采集的振動數據穩定性最差,數據偏離程度最大,車身和車尾的數據質量明顯低于車頭。
(3)在車輛的不同位置,智能手機在豎直姿態下采集的數據質量均高于水平姿態。因此,在車頭部位豎直采集振動數據是最佳的放置方式。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
紅領巾·萌芽(2022年9期)2022-11-24 05:55:58
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
英語文摘(2020年5期)2020-09-21 09:26:30
天天愛科學(2020年6期)2020-09-10 07:22:44
中國生殖健康(2019年2期)2019-08-23 08:12:08
趣味(語文)(2018年8期)2018-11-15 08:53:00
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車觀察(2016年3期)2016-02-28 13:16:26