基于EV3教育機器人的全地形車應用與研究
2021-02-28 07:30:09周穎怡
現代信息科技 2021年16期


摘? 要:EV3全地形車機器人融合了全地形車可以在任何地形上行駛的優秀越野性能和機器人自動執行預定任務的智能系統,使其功能多樣化和現代化。文章以EV3機器人的全地形車為研究方向,利用EV3套件搭建全地形車模型,在沙地、山地及林地模擬等模擬地形上進行測試,檢驗EV3全地形車機器人的通過能力,并進行優化調整,為EV3全地形車機器人的設計提供一定的參考意義。
關鍵詞:EV3;全地形車;越障
中圖分類號:TP242? ? ? ? ? ? ? ? ? ?文獻標識碼:A文章編號:2096-4706(2021)16-0041-04
Application and Research of All-terrain Vehicle Based on EV3 Education Robot
ZHOU Yingyi
(Lingnan Normal University, Zhanjiang? 524048, China)
Abstract: EV3 all-terrain vehicle (ATV) robot combines the excellent off-road performance of ATV that can run on any terrain with the intelligent system that the robot can automatically perform scheduled tasks, so that it’s functions are diversified and modernized. This paper takes EV3 robot all-terrain vehicle as the research direction, using EV3 kit to build all-terrain vehicle model, test on sand, mountain and woodland and other simulated terrains,, test the passing ability of EV3 all-terrain vehicle robot, optimization and adjustment are carried out to provide reference for the design of EV3 all terrain vehicle robot.
Keywords: EV3; all-terrain vehicle; obstacle crossing
0? 引? 言
全地形車是指可以在所有地形上行駛的車種,適用于各種復雜的地形環境,可以方便地穿越溝壑、沼澤和山坡,具有越野性能好、成本低、對環境危害小等優點。常用于森林防火、勘測、建筑工地等特殊領域,還可以按照預定程序來取代或協助人類危險、復雜和重復性的工作優點,具有十分樂觀的發展前景。
EV3是第三代MINDSTORMS機器人,該套件配有EV3智能主機、各類傳感器、電動馬達、積木零件(齒輪、輪軸、橫梁、插銷)等,利用EV3設計全地形車,使用者可根據個人需求搭建不同的機器人,通過編寫程序使機器人按指令執行任務。
1? EV3全地形車的結構設計
EV3全地形車應具有穿越沙地、爬坡越壕、避開障礙物等功能。本課題研究選取具有代表性的沙地、山地和林地三種模擬地形進行測試。如果EV3全地形車機器人能自主順利通過這三種模擬地形,則說明全地形車的越野性能強大,也能通過其他地形。
沙地的地形特點主要是沙地和沙丘。平整沙地沙量少會減少履帶的抓地力,導致打滑,而沙量多的地面更松軟,會使履帶打滑空轉或下陷;起伏的沙丘會導致車兩側的高度不同,使全地形車發生側滑或方向偏轉,影響全地形車前進的方向。針對打滑下陷的問題,可以加長全地形車的履帶,安裝防滑墊增加對地面的摩擦力。
山地的地形特點是坡度大和溝壑多。爬坡時電機馬力不足會使全地形車原地打滑空轉,采用雙電機設計可以解決這個問題。越長的履帶能跨越越寬的溝壑,盡可能設計出長度更長的履帶。車身重量不均衡容易出現翻車的問題,在設計時要保證車頭與車尾重量均衡。利用觸碰傳感器觸發抬起裝置,使全地形車在遇到難以跨越的溝壑時進行尾部抬升,使其順利通過。
林地地形的特點主要問題是高大樹木多,會擋住全地形車的前進方向,利用超聲波傳感器發出超聲波識別障礙物并反射回接收器,判斷障礙物與全地形車的距離,使車輛繞過障礙物,繼續前行。
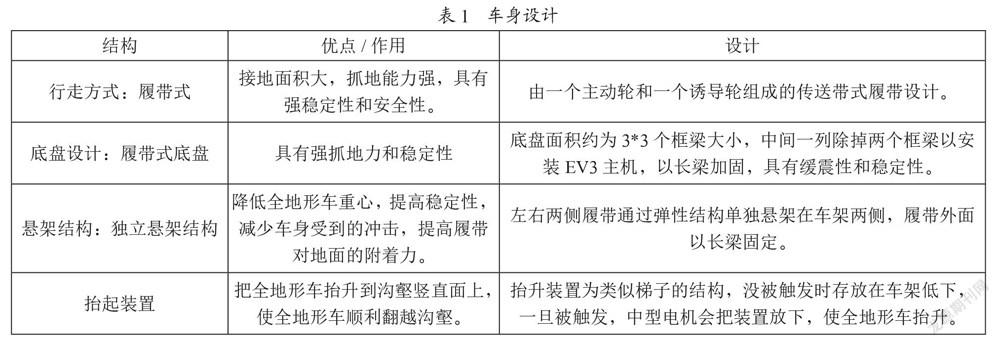
經過上述不同地形的分析,將車身設計如表1所列。
1.1? 行走方式
全地形車的行車方式一般分為輪式、履帶式、氣墊式、多足行走式等類型。全地形車最常使用的行車方式是履帶式。它的優點是可以爬陡坡、拓寬壕、涉深水、攻克豎墻、穿越沼澤和田地,不怕各種路況,能適應大部分地形。經過數據采集和部分車身測試,全地形車采用履帶驅動方式,履帶式行車方式行走可以增加對地面的摩擦,穩定性和安全性更高。因為履帶的接地面積相對更大,可以很大程度地增加全地形車在松軟、泥濘路面上的通過能力,下陷量大大降低。履帶板上獨特的花紋和履帶板安裝的防滑墊,都可以增加對地面的附著力,不容易打滑。根據不同的履帶接地長度,全地形車能輕易通過一定的溝壑寬度和克服一定高度的垂壁。
1.2? 底盤設計
全地形車的底盤高低直接影響到車輛的通過性。選用履帶式底盤是因為該底盤結構的牽引力大,抓地能力強,在爬坡越壕方面的能力更強;機動性能大,轉彎半徑小,更適于行走在沙地、泥濘沼澤和崎嶇山地上。
1.3? 懸架結構
車輛懸架結構可以起到緩沖震動、傳遞扭矩并支撐車身的作用。懸掛結構一般分為兩類:非獨立懸掛結構和獨立懸掛結構。獨立懸掛結構的左右履帶通過彈性結構分別懸掛在車架或車身上若全地形車行駛過程中一側履帶受到崎嶇路面的影響,其狀態發生變化時不會影響到另一側履帶的情況。而非獨立懸架結構左右兩側的履帶由一根車橋連接在一起,兩側履帶狀態變化會互相影響。
1.4? 抬升裝置
抬升裝置是一個簡單的結構,利用了觸碰傳感器檢測傳感器紅色按鈕何時被按壓何時被松開,通過對觸碰傳感器進行編程,使其對按壓、松開或碰撞作出反應。把一個類似梯子的結構與一個受觸碰傳感器控制的中型電機連接,當車子爬升時觸發到觸碰傳感器,放下抬升裝置,把全地形車抬升到溝壑豎直面上,使全地形車順利翻越溝壑。
經測試與優化調整,本課題研究的EV3全地形車機器人的最終設計方案采用的行走方式為倒梯形履帶結構,主要有主動輪、誘導從動輪、托帶輪、負重輪和履帶五個部分。車身的懸架結構具有強穩定性和緩沖性,對全地形車在穿越各種特殊地形時能起到穩固、防震的作用,減少車輛受損情況。雙電機動力系統,兩個驅動輪相互獨立驅動,方便小車進行轉向、拐彎等功能,同時為小車提供足夠動力爬陡坡、越壕溝,更適合行駛在各種復雜地形。抬升裝置的設計簡便有效,主機接收到觸碰傳感器被觸發的信號,啟動連接抬升裝置的中型電機,放下裝置,將車身從地面抬升到臺階豎直面上,車子可輕松攀爬翻越上臺階。超聲波避障裝置展現實用性與設計感。整車布局合理美觀,傳感器使用恰當,實用性強。
綜合以上分析及測試結果,最終將全地形車外觀設計如圖1、圖2所示。
2? EV3全地形車的程序設計
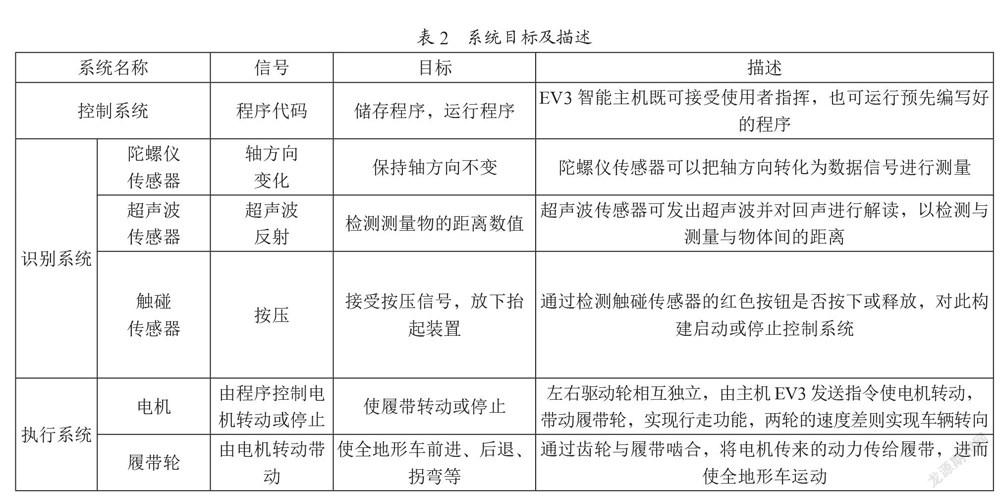
設計中采用可編程主機EV3作為核心,為車輛的識別與驅動提供控制。采用程序方塊化的方式進行測試,利用不同的傳感器檢測各種數據,根據所檢測的數據實現對全地形車機器人的智能化識別,最終達到全地形車機器人在行駛過程中完全自動通過各種地形。本課題研究設計的EV3全地形車機器人系統的功能設計分為控制、識別和執行三個部分,如表2所列。
(1)控制系統。由EV3智能主機,內置揚聲器、USB接口、迷你SD卡讀卡器接口、四個輸入端口和四個輸出端口,可使用六節AA電池或原裝2050毫安時的鋰電池。使用EV3智能主機作為控制器,只需要在主機內編程好程序或用電腦編程后導入,一旦啟動便可使全地形車機器人按既定程序執行任務,無須人為操控。
(2)識別系統。識別系統由陀螺儀傳感器、超聲波傳感器和觸碰傳感器進行檢測、上傳數據。
陀螺儀傳感器主要作用是使全地形車在一個軸方向上行駛,當傳感器檢測到全地形車前進方向發生改變時,上傳數據到主機,控制系統根據程序下發指令糾正方向,使全地形車始終保持在一個方向上行駛。
超聲波傳感器通過向外發射超聲波,超聲波在空氣中傳播,途中碰到障礙物會被反射回來,當發射的聲波被超聲波接收器接收到,停止計時,根據發射與接收的時間差與超聲波的傳播速度來計算全地形車離障礙物的距離,數據傳送至主機,由主機發送下一步指令。
觸碰傳感器主要在全地形車需要攀爬臺階的情況下被觸發,觸碰傳感器連接到全地形車尾部的抬升裝置,當傳感器觸碰到臺階的垂直面時,傳感器控制裝置抬升,將車身從地面抬升到臺階豎直面上,全地形車能夠爬上臺階。
(3)執行系統。執行系統的直接執行者是履帶輪和電機,該車采用履帶輪設計,主要分為主動輪、導向從動輪、皮帶支承輪、承重輪和履帶五部分。驅動輪通過齒輪與軌道嚙合,將電機的動力傳遞給軌道,使全地形車輛運動;導向從動輪起導向和支撐作用,具有調整履帶松緊的功能;托帶輪用于托舉履帶。左右驅動輪相互獨立,由主機EV3發送指令使電機實行轉動,帶動履帶輪,實現行走功能,兩輪的速度差則實現車輛轉向。
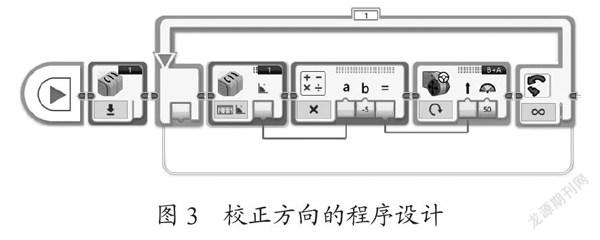
2.1? 利用陀螺儀傳感器使車子保持方向
陀螺儀傳感器利用“當旋轉物體的旋轉軸不受外力影響時,方向不變”的原理來保持方向,調試時可以知道陀螺儀傳感器向左偏時是負值,向右偏時是正值;而電機的移動轉向模塊偏轉數值為負時,方向向左,數值為正時,方向向右。在這部分的程序中使用了數學模塊中的乘法,如圖3所示。
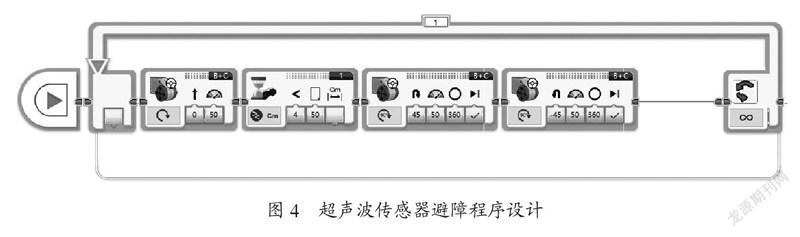
2.2? 利用超聲波傳感器避障
超聲波傳感器的發射器向外發射超聲波,遇到障礙物時被反射。根據發射和接收的時差和超聲波的傳播速度,計算出全地形車輛與障礙物之間的距離。
小車利用超聲波傳感器避障時,需要考慮的是避開障礙物后如何回到原來的行走方向上。通過制定程序,當超聲波傳感器檢測到50厘米內有高大障礙物,電機往右45度前進,繞開障礙物后電機向左45度,回到原來的行走方向上。
全地形車在直行過程中,利用超聲波傳感器等待模塊,若檢測到前方50厘米處有高大障礙物,移動模塊開啟指定度數使全地形車往右轉向45度,再把移動模塊的指定度數調為-45度,使全地形車向左轉,回到原來的行走方向上(如圖4所示)。
2.3? 利用觸碰傳感器放下抬升裝置
觸碰傳感器是一種模擬傳感器,利用了觸碰傳感器來檢測傳感器的紅色按鈕何時被按下和釋放,通過對觸碰傳感器進行編程,它可以對不同的狀態作出反應。
在車輛尾部安裝觸碰傳感器,當車子爬升時觸發到觸碰傳感器,放下抬升裝置,車子可以順利爬升。程序需要用到等待模塊,當觸碰傳感器被按壓—松開后,中型電機啟動,放下抬升裝置,等待3秒讓全地形車順利爬升或跨越溝壑,中型電機再反方向轉動,把抬升裝置收起。最后添加循環模塊便可。此過程需要注意收放抬升裝置和車子爬升或跨越溝壑的時間。程序設計如圖5所示。
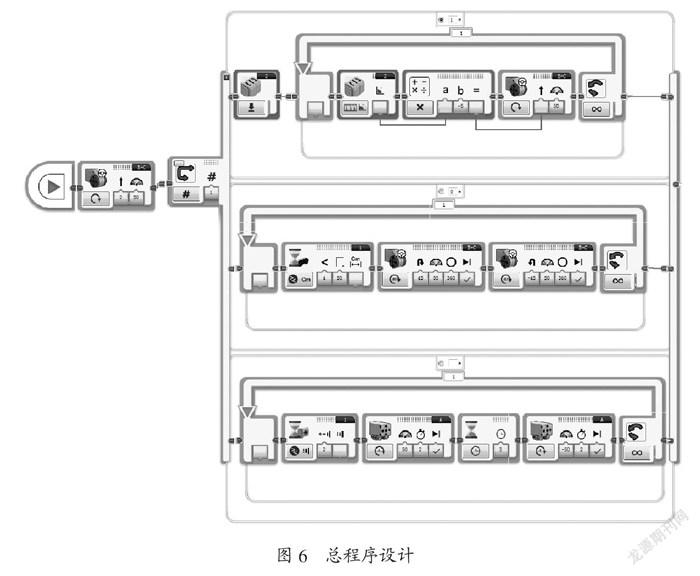
2.4? EV3全地形車機器人總程序設計
總程序把各個部分的傳感器的程序組合起來,需要用到切換模塊的數字模塊。全地形車一般狀態下為直行,觸發了不同的傳感器便執行對應的程序,如圖6所示。
3? 結? 論
本文通過對全地形車的性能結構進行研究分析,設計一款適于行駛在沙地、沙地和林地的EV3全地形車機器人,通過多次測試與優化完成了EV3全地形車機器人的搭建與程序編寫,實現了EV3全地形車機器人在多種地形上完全自主地順利通過沙地、山地和林地三種地形的目標。在實際應用中,可根據實際情況對EV3全地形車機器人電機的功率、傳感器的靈敏度、外觀設備等進行改進,以適應不同場合的需求。
參考文獻:
[1] 張韜懿,王田苗,吳耀,等.全地形無人車的設計與實現 [J].機器人,2013,35(6):657-664.
[2] 劉江華.四輪獨立驅動電動全地形車專用底盤結構設計及優化 [D].南京:東南大學,2015.
[3] 吳興.一種輪履復合救援機器人傳動系統的結構設計 [D].天津:天津理工大學,2014.
[4] 駱群.全地形車車架及前懸掛系統結構分析與優化 [D].揚州:揚州大學,2014.
[5] 羅鋼,李紅,程林,等.基于Adams/Car的全地形車前懸架仿真分析及優化設計 [J].農業裝備與車輛工程,2016,54(8):22-25.
[6] 林彤,金濯,任玲.基于探索者機電創新平臺的全地形車研制 [J].中國教育技術裝備,2016(22):41-44+51.
作者簡介:周穎怡(1992—),女,漢族,廣東廣州人,助教,碩士研究生,主要研究方向:科學教育、創客教育。
