晶格型模塊化軟體機(jī)器人自重構(gòu)序列
2021-03-02 10:17:22劉佳鵬王江北費(fèi)燕瓊
上海交通大學(xué)學(xué)報 2021年2期
關(guān)鍵詞:模塊化
劉佳鵬, 王江北, 丁 燁, 費(fèi)燕瓊
(上海交通大學(xué) 機(jī)器人研究所, 上海 200240)
軟體機(jī)器人主要由柔韌性強(qiáng)的材料組成,相比于剛體機(jī)器人可以更為輕松地實現(xiàn)膨脹、彎曲、扭轉(zhuǎn)等動作,在探測、偵察和醫(yī)療等方面具有巨大的應(yīng)用潛力[1-2].關(guān)于軟體機(jī)器人的研究涉及到多個方面,但對軟體機(jī)器人自重構(gòu)方法的研究還處于初始階段.Germann等[3]提出一種基于電吸附的柔性連接結(jié)構(gòu),但其吸附力較小,只能用于輕型模塊的相互連接.Kwok等[4]設(shè)計了一種可重構(gòu)軟執(zhí)行器,用嵌入的磁鐵實現(xiàn)自對準(zhǔn)矯正,可以用于裝配混合六足機(jī)器人.這種機(jī)器人能夠完成不同的任務(wù),例如遠(yuǎn)程組裝以及其執(zhí)行機(jī)構(gòu)的拆卸.Nemitz等[5]提出一種由音圈驅(qū)動的模塊化蠕蟲機(jī)器人,其不需要外部的氣壓驅(qū)動系統(tǒng),每個軟體模塊可以獨(dú)立驅(qū)動進(jìn)行擴(kuò)張和收縮運(yùn)動,軟體機(jī)器人通過永磁鐵連接各個軟體模塊,可以完成蠕動前進(jìn)、聲音輸入輸出等功能.Vergara等[6]設(shè)計的軟體立方體軟體模塊利用永磁鐵進(jìn)行對接,通過單個軟體模塊的膨脹和收縮實現(xiàn)特定排列位置下的自重構(gòu).Zou等[7]設(shè)計的可重構(gòu)軟體機(jī)器人同樣也依靠永磁鐵進(jìn)行軟體模塊間的對接,使軟體機(jī)器人實現(xiàn)平面運(yùn)動和自動組合等功能,但該設(shè)計無法實現(xiàn)軟體模塊的自動分離.
實際上,對于剛體機(jī)器人的模塊化研究早于軟體機(jī)器人.傳統(tǒng)的剛體模塊化機(jī)器人與環(huán)境為剛性接觸,易對環(huán)境或模塊單元造成破壞,環(huán)境友好性較低.相比于剛性機(jī)器人,軟體機(jī)器人由柔性材料組成,可以通過柔順變形適應(yīng)不同環(huán)境,并能夠與操作對象友好接觸[8].目前,對軟體機(jī)器人自重構(gòu)的研究尚且局限在平面,適用的場合較少.隨著對軟體模塊化機(jī)器人自重構(gòu)研究的深入,未來空間自重構(gòu)的模塊化軟體機(jī)器人能夠適用于更多的場合.
受模塊化剛體機(jī)器人的啟發(fā),本文設(shè)計了一種具有良好膨脹特性的晶格型模塊化軟體機(jī)器人,采用電磁鐵連接方式實現(xiàn)相鄰軟體模塊間的連接和分離,通過膨脹-收縮的運(yùn)動規(guī)則[9],實現(xiàn)機(jī)器人從一個構(gòu)型到另一構(gòu)型的自重構(gòu)動作.
1 晶格型模塊化軟體機(jī)器人的設(shè)計
晶格型模塊化軟體機(jī)器人由多個呈正六面體構(gòu)型的軟體模塊構(gòu)成,每個軟體模塊由呈正六面體的硅膠主體和主從對接面組成,主對接面是由與硅膠主體螺紋連接的電磁鐵組成,從對接面是由與硅膠主體螺紋連接的鐵盤組成.
軟體模塊制作采用825#半透明模具硅膠,如圖1所示.其制作過程為,先用硅膠澆注出軟體模塊頂部、軟體模塊中部和軟體模塊底部,在軟體模塊中部安裝鐵盤和電磁鐵后,與軟體模塊頂部和底部初步粘合,獲得粘合完成的初始軟體模塊,尺寸為46 mm×46 mm×50 mm(見圖1(a)和(b)).采用二次澆注使軟體模塊一體化成型,設(shè)計的軟體模塊要求膨脹性好且壁厚薄.具體方法為將初步粘合完成的軟體模塊放置在二次澆注模具中,將硅膠倒入模具后,再用4塊擠壓薄板擠壓出多余的硅膠,獲得尺寸為50 mm×50 mm×50 mm的中間軟體模塊(見圖1(c)和(d)).在軟體模塊底部添加厚度為0.2 mm的應(yīng)變限制層及澆注厚度為10 mm的底部加厚層,限制軟體模塊在充氣后底部的膨脹變形,使得軟體模塊間的對接面高度始終不變,以保證軟體模塊對接成功.最終可以獲得質(zhì)量為142 g,尺寸為50 mm×50 mm×60 mm的軟體模塊(見圖1(e)和(f)).

圖1 軟體模塊的制作過程Fig.1 Manufacturing process of soft module
軟體模塊與軟體模塊之間的對接采用電磁鐵連接,主對接面嵌有電磁鐵,從對接面嵌有鐵盤.截面有無凸起設(shè)計的軟體模塊,如圖2所示.由圖2(a)可知,軟體模塊的4個側(cè)面分別嵌有尺寸相同的鐵盤和吸盤式電磁鐵,電磁鐵型號為XDA-p15/5,直徑為15 mm,寬度為5 mm,額定電壓為24 V.軟體模塊橫截面內(nèi)部采用凸起設(shè)計,一方面可以保證有足夠的空間嵌入鐵盤和電磁鐵,另一方面相比于截面無凸起的設(shè)計(見圖2(b)),凸起設(shè)計可以使軟體模塊留有較大的空腔, 以保證軟體模塊的膨脹性能.
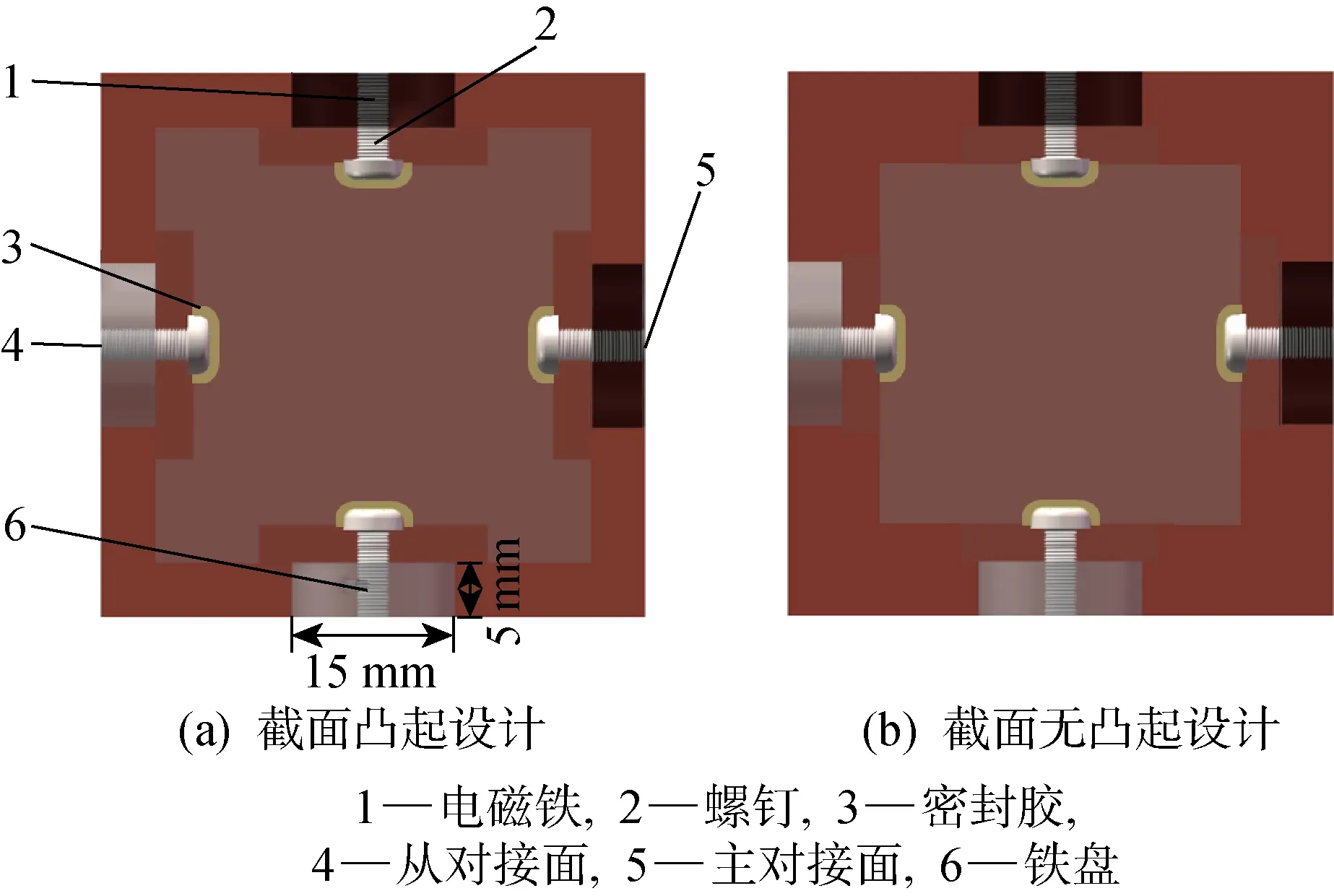
圖2 軟體模塊截面設(shè)計示意圖Fig.2 Section design diagram of soft module
2 軟體模塊間的連接分析
軟體模塊間的連接示意圖如圖3所示.其中:L為軟體模塊1和軟體模塊2之間的距離;FN為軟體模塊1與基板之間的最大靜摩擦力;FT為軟體模塊間的電磁力;p為軟體模塊2的充氣氣壓;δ為軟體模塊2充氣膨脹后模塊間的距離,即為電磁鐵與鐵盤間的氣隙.在兩個軟體模塊初始狀態(tài)相距L的情況下,先對軟體模塊2的充氣膨脹進(jìn)行分析.軟體模塊2對接面膨脹的形狀可以近似地看為一段圓弧,如圖4所示.其中:h為膨脹量;d為模塊尺寸.

圖3 軟體模塊間的連接示意圖Fig.3 Connection diagram between soft modules

圖4 軟體模塊2的膨脹形狀變化示意圖Fig.4 Diagram of expansion shape change of soft module 2
軟體模塊2單面膨脹的體積V0可以近似為球缺的體積,球缺高即為膨脹量h、截面直徑即為模塊尺寸d,則有:
(1)
軟體模塊的應(yīng)變限制層限制了軟體模塊底面的膨脹,則軟體模塊膨脹后增加的體積為軟體模塊5個面膨脹體積的總和,即
ΔV=5V0
(2)
ΔV與p的關(guān)系[6]為
(3)
式中:ΔVτ為腔體體積變化常數(shù);pmax為腔體失效氣壓.聯(lián)立式(1)~(3),可獲得p和h的關(guān)系為
(4)

圖5 p與h的關(guān)系Fig.5 p versus h
對單個軟體模塊進(jìn)行充氣實驗,采集p和h的實驗數(shù)據(jù)進(jìn)行最小二乘法擬合,獲得ΔVτ=62.83%,pmax=1 069 kPa.p與h的關(guān)系如圖5所示.由圖5可見,當(dāng)充氣壓力較小時,軟體模塊的膨脹主要表現(xiàn)為模塊尺寸d的增大,因此測得的實驗數(shù)據(jù)與理論曲線相差較大.而當(dāng)充氣壓力較大時,模塊尺寸d基本保持不變,軟體模塊的膨脹主要表現(xiàn)為外表面的凸起,膨脹體積符合截面直徑為d的球缺假設(shè),此時實驗數(shù)據(jù)與理論曲線較為接近.
對軟體模塊的電磁鐵連接進(jìn)行靜磁場分析,基于能量平衡方程,電磁力FT為[10-11]
(5)
式中:Fm為線圈磁勢;Λ為磁導(dǎo);μ為磁導(dǎo)率;S為磁極垂直于磁場方向的表面積.δ與h滿足下式:
δ+h=L
(6)
根據(jù)式(5)和(6),可以獲得FT與h的關(guān)系式為
(7)
假定軟體模塊與基板的滑動摩擦力與最大靜摩擦力FN相等,繪制FT-h、p-h、FN-h的關(guān)系曲線,獲得軟體模塊的連接分析圖,如圖6所示,其中h0為軟體模塊初始膨脹量
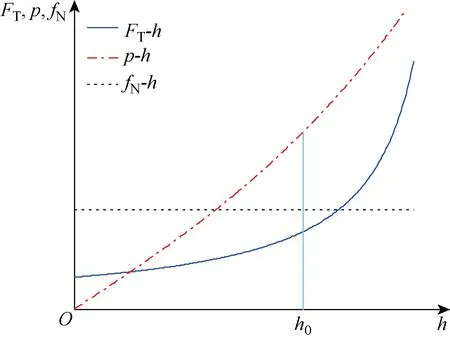
圖6 軟體模塊的連接分析圖Fig.6 Soft module connection analysis diagram

圖7 軟體機(jī)器人的自重構(gòu)方法Fig.7 Self-reconfiguration method of soft robot
由圖6可知,在軟體模塊距離L不變,且軟體模塊初始膨脹量為h0的情況下,通過增加p、增大h,可以減小軟體模塊電磁鐵與鐵盤的氣隙δ,此時軟體模塊間的FT也會增加,當(dāng)FT大于軟體模塊與基板的最大靜摩擦力FN時,軟體模塊便能順利連接.根據(jù)式(4)和(7),相鄰兩軟體模塊連接所需要的充氣氣壓應(yīng)滿足:
(8)
在額定電壓下,軟體模塊1和2連接后的吸附力約有50 N,遠(yuǎn)大于軟體模塊自重,因此軟體模塊在連接后,帶動相鄰軟體模塊移動的過程中不會發(fā)生軟體模塊分離脫落的情況,通過控制電磁鐵的通斷就能控制軟體模塊與軟體模塊之間的連接與斷開,且連接迅速可靠.
3 晶格型模塊化軟體機(jī)器人的自重構(gòu)序列
晶格型模塊化軟體機(jī)器人采用電磁鐵對接方式,根據(jù)1.5倍膨脹率完成膨脹-收縮的自重構(gòu)策略,如圖7所示.其中:d1為軟體模塊的初始尺寸;d2為軟體模塊膨脹后的尺寸.由7個軟體模塊組成的晶格型模塊化軟體機(jī)器人的初始構(gòu)型如圖7(a)所示,相鄰軟體模塊之間緊密連接.隨后,軟體模塊1、5脫離連接,軟體模塊2、6脫離連接,軟體機(jī)器人頂部的軟體模塊1、2、3同時膨脹,當(dāng)3個軟體模塊尺寸增大到原來的1.5倍時,軟體模塊1將被推動至軟體模塊4的正上方并與之連接,如圖7(b)所示.最后,左上角的軟體模塊1、2、3同時收縮,將軟體模塊2拖動至軟體模塊5正上方與之連接, 將軟體模塊3拖動至軟體模塊6正上方與之連接,如圖7(c)所示,完成從初始構(gòu)型到目標(biāo)構(gòu)型的自重構(gòu)過程,最終完成自重構(gòu)任務(wù).
考慮到軟體模塊在膨脹推動相鄰軟體模塊的過程中,容易出現(xiàn)相鄰軟體模塊與其他軟體模塊相互摩擦而導(dǎo)致無法到達(dá)指定位置的情況,基于膨脹-收縮運(yùn)動規(guī)則,經(jīng)過多次實驗,提出了晶格型模塊化軟體機(jī)器人的基本自重構(gòu)序列:通過預(yù)先使軟體模塊傾斜一個角度,使軟體模塊在移動過程中減少與其他軟體模塊產(chǎn)生摩擦接觸,以保證軟體模塊成功對接.基本自重構(gòu)序列如圖8所示.

圖8 軟體機(jī)器人的自重構(gòu)序列Fig.8 Self-reconfiguration sequence of soft robot
步驟17軟體模塊晶格型模塊化軟體機(jī)器人處于初始狀態(tài),各個軟體模塊緊密連接.
步驟2軟體模塊1與軟體模塊5斷開,軟體模塊1輕微膨脹,傾斜一個角度,約3.5°.
步驟3軟體模塊2與軟體模塊6斷開,軟體模塊1、2同時膨脹,增大傾斜角度,約5.9°.
步驟4軟體模塊1、2、3同時膨脹最大,約為原尺寸1.5倍,軟體模塊1推至軟體模塊4附近.
步驟5軟體模塊4輕微膨脹后與軟體模塊1連接.
步驟6軟體模塊1、2、3、4同時收縮,使軟體模塊1、2、3整體向左移動一個軟體模塊的距離后,軟體模塊2與5,軟體模塊3與6依次對接,軟體機(jī)器人完成自重構(gòu).
4 軟體機(jī)器人的自重構(gòu)實驗
根據(jù)單軟體模塊充氣實驗,選用30 kPa氣壓作為軟體模塊的工作氣壓,軟體模塊整體尺寸相對于原有尺寸膨脹了1.5倍,符合實驗要求.軟體機(jī)器人自重構(gòu)實驗選用比硅橡膠摩擦系數(shù)小的聚甲基丙烯酸甲酯(PMMA)板作為實驗板,并在PMMA板上涂上硅油,進(jìn)一步減小軟體模塊互相推動和牽引時與PMMA板的摩擦.
軟體機(jī)器人自重構(gòu)實驗過程如圖9所示.其中t為實驗進(jìn)行時間.通過軟體模塊1、2、3的依次膨脹,可以順利推動軟體模塊1達(dá)到軟體模塊4上方并與之連接,軟體模塊1、2、3收縮后相比原始位置向左移動了一個軟體模塊尺寸的距離,從初始構(gòu)型重構(gòu)到目標(biāo)構(gòu)型.實驗證明了所設(shè)計的軟體模塊化機(jī)器人按照本文提出的基本自重構(gòu)序列可以完成自重構(gòu)動作.通過多軟體模塊依次對接和分離的自重構(gòu)動作,機(jī)器人可以完成狹窄空間中的前進(jìn)搬運(yùn)等任務(wù).
5 結(jié)語
本文設(shè)計了一種新穎的氣壓驅(qū)動、晶格型自重構(gòu)模塊化軟體機(jī)器人,該軟體機(jī)器人由多個正六面體的軟體模塊組成,每個軟體模塊具有較好的充氣膨脹特性;軟體模塊之間采用電磁鐵連接,電磁鐵的通斷控制軟體模塊間的連接與分離;建立了充氣氣壓與軟體模塊膨脹量之間的映射關(guān)系,獲得相鄰兩軟體模塊對接所需的充氣氣壓條件;基于膨脹-收縮運(yùn)動規(guī)則,提出了該晶格型模塊化軟體機(jī)器人的基本自重構(gòu)序列,并通過實驗驗證了其可行性.該自重構(gòu)模塊化軟體機(jī)器人具有質(zhì)量小、體積小、驅(qū)動簡單、連接方便等優(yōu)點(diǎn),在空間探測、現(xiàn)場救援等方面具有潛在的應(yīng)用價值.
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統(tǒng)管理學(xué)報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
石油化工建設(shè)(2015年2期)2015-12-01 04:16:44
中國教育技術(shù)裝備(2015年10期)2015-03-01 02:41:05